
100%新能源电源经柔性直流送出系统的机电暂态建模仿真研究
2023-12-07 08:28苏寅生赵利刚姚海成王长香李豹甄鸿越高琴周挺辉黄冠标
广东电力 2023年10期
苏寅生,赵利刚,姚海成,王长香,李豹,甄鸿越,高琴,周挺辉,黄冠标
(1. 中国南方电网电力调度控制中心,广东 广州 510663;2. 直流输电技术国家重点实验室(南方电网科学研究院有限责任公司),广东 广州 510663)
构建以新能源为主体的新型电力系统是贯彻落实我国能源安全新战略、实现“30·60”碳中和气候应对目标的重大需要。大力发展以风能、太阳能为代表的新能源电力,促进高比例可再生能源全额消纳,成为我国构建新型电力系统的当务之急。我国西部沙漠、戈壁、荒漠地区有极其丰富的风、光资源,拥有巨大的可再生能源发电开发潜力,但这些地区通常无负荷、无就地大型常规水火电电源、无消纳能力,风电、光伏等纯新能源发电组网经柔性直流送出是该类型新能源基地送出的有效途径[1]。
风电、光伏等纯新能源发电组网经柔性直流送出是一种全新形态的独立电网,建模仿真是研究分析这种新形态电网的基础。针对含大量电力电子开关器件的风力光伏发电和柔性直流输电系统,电磁暂态仿真虽具有很好的准确性,但其求解的规模和速度受到限制[2]。机电暂态仿真与电磁暂态仿真相比,对于相同规模电网的仿真所需计算资源较少,是大电网安全分析的主要手段[3]。现有机电暂态仿真技术主要基于同步电机理论构建,对于仅包含直流、风电、光伏的电力电子系统,已有建模仿真方法不能完全适应,需开展相关研究提出新的建模仿真方法。
针对新能源经柔性直流送出的建模仿真问题,国内外学者进行了大量研究。文献[4]提出了电网换相换流器(line-commuted converter,LCC)-模块化多电平换流器(modular multilevel converter,MMC)型混合多端直流输电系统的潮流计算和机电暂态建模方法。文献[5]提出了一种基于单电压环的柔性直流换流器机电暂态仿真模型,将基于电压源转换器的多端高压直流系统纳入电力系统暂态稳定型仿真。文献[6]分析了向无源网络供电的MMC型柔性直流输电系统结构和工作原理,基于PSCAD建立了MMC型柔性直流输电系统通用的换流系统和受端交流系统的数学模型。上述文献所建立模型主要针对接入大电网的柔性直流输电系统,其控制策略、建模方法与接入无交流电源网络的柔性直流输电系统完全不同;已开展的接入无交流电源网络的柔性直流输电系统建模主要基于电磁暂态仿真技术开展,且只考虑柔性直流向无源网络供电的情况;针对风光新能源经柔性直流送出系统,需要重点解决柔性直流的构网型控制策略建模方法以及无同步机电源的多电力电子设备接入系统仿真中可能存在的数值振荡问题,尚未有研究提出其机电暂态建模方法。
本文针对风光新能源经柔性直流送出系统的机电暂态建模仿真需求,首先分析风光新能源经柔性直流送出系统机电暂态仿真的一般结构;其次提出无同步机情况下采用电压-频率(Vf)控制模式的柔性直流换流器机电暂态建模方法;然后,研究风电和光伏发电系统机电暂态模型;最后,采用DSP软件[7]建立100%新能源电源经柔性直流送出系统的仿真算例,通过直驱风电机组、光伏发电经柔性直流送出案例进行分析,以验证所提建模方法的有效性。
1 风光新能源经柔性直流送出系统机电暂态仿真的一般结构
在传统交流电网中,机电暂态仿真主要研究电力系统受到大扰动(如短路故障,切除线路、发电机、负荷,发电机失去励磁或者冲击性负荷)后的暂态稳定和受到小扰动后的静态稳定性能,即能否经过一定的时间后回到原来的运行状态或过渡到一个新的稳定运行状态。其基于基波、单相和相量模拟技术,对电力系统遭受扰动后数秒到数十秒之间的机电暂态过程进行仿真模拟,重点关注由于发电机和电动机电磁转矩的变化引起发电机转子机械运动的变化过程以及系统保持同步稳定运行的能力。
机电暂态仿真需要求解系统的网络方程和微分方程,方程形式为:
(1)

在传统电网中,发电机是机电暂态仿真中最关键的元件,节点注入电流及状态变量主要为发电机相关变量,通过网络方程和微分方程的联立求解或迭代求解,可完成整体系统的时域仿真计算。常规直流、柔性直流、新能源发电、柔性交流装置等电力电子设备一般采用与交流系统交替求解的方式,以注入电流形式加入到网络方程中[8]。
风光新能源经柔性直流送出系统如图1所示,光伏电站、风力发电场经输电线路接到换流母线,发电功率由MMC送出。图1中:Z1为光伏电站1与换流母线之间的等值阻抗,Z2为光伏电站2与换流母线之间的等值阻抗,Zn为风电场n与换流母线之间的等值阻抗。

图1 风光新能源经柔性直流送出系统Fig.1 Schematic diagram of wind power and PV station connected by MMC-HVDC
在风光新能源经柔性直流送出系统中,变压器、交流线路等输变电设备与传统电网相同,因此网络方程仍采用式(1)。微分方程不再是发电机相关状态变量方程,而是电力电子设备控制系统相关状态变量方程。因电力电子设备的快速动态特性,一般需采用比交流网络更小的仿真步长,网络方程和微分方程不再能联立求解,一般需采用交替求解方式。此时网络方程为全代数方程求解,需通过建立合理模型来提升网络方程和微分方程交替求解的数值稳定性。风光新能源经柔性直流送出系统的机电暂态仿真基本方程见式(2)、(3),采用交替求解方式进行求解:
(2)
(3)
2 柔性直流换流器Vf控制机电暂态模型
在常用的跟网型控制策略下,风电和光伏发电系统需要有交流电压的支撑才能正常运行,在交流大电网中交流电压主要由同步发电机提供。在风电、光伏经柔性直流送出系统中,交流电压则需由柔性直流提供,柔性直流换流站应控制换流母线交流电压幅值和频率恒定[9]。
采用恒定以同步速旋转的dq坐标系进行坐标变换,控制器框图如图2所示[10-11],其中:Usdref、Usqref分别为换流母线电压d、q轴分量的参考值;Usd、Usq分别为换流母线电压d、q轴分量的实际值;Isdref、Isqref分别为d、q轴电流的参考值;Isd、Isq分别为d、q轴电流的实际值;Udref、Uqref分别为换流器阀侧电压的d、q轴参考值;kud、Tud、kid、Tid和kuq、Tuq、kiq、Tiq为PI控制器的比例系数和积分时间常数,ω为额定电角速度,L为换流变压器的等效电感,s为拉普拉斯算子。要控制换流母线的电压幅值和频率恒定,只需控制Usd=Um、Usq=0(其中,Um为换流母线电压幅值的设定值)。
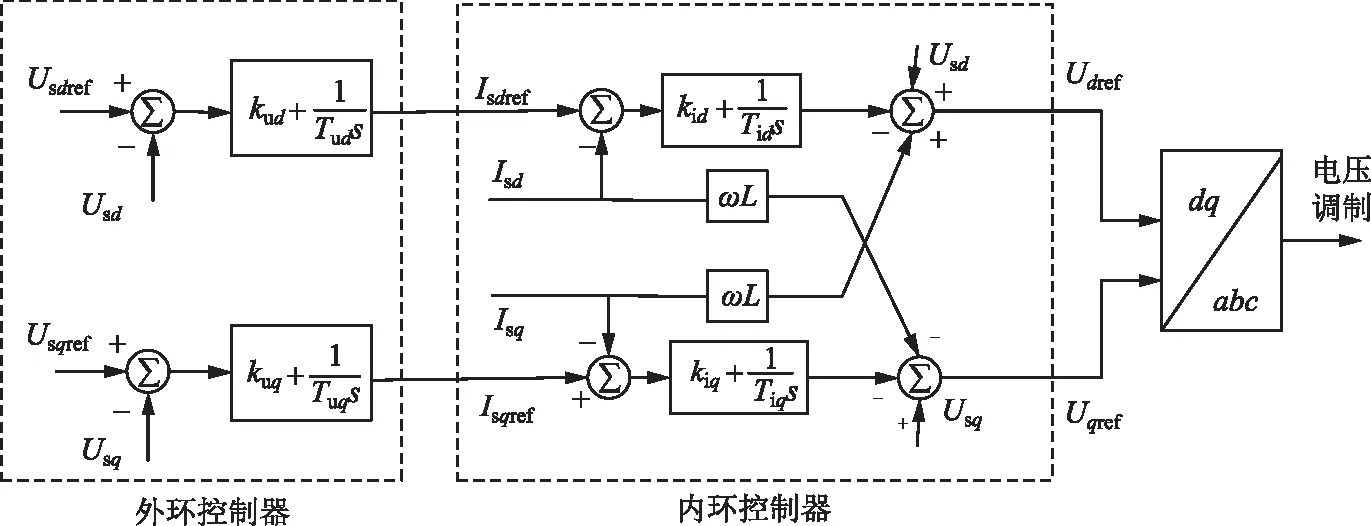
图2 柔性直流Vf控制系统框图Fig.2 Vf control system diagram of MMC-HVDC


PCC—并网点,point of common coupling的缩写。图3 接入大电网的柔性直流模型Fig.3 MMC-HVDC model connected to the AC grid
(4)
采用图3所示模型开展风光新能源经柔性直流送出系统的建模仿真,求解网络方程时柔性直流、新能源等动态设备全部等效为注入电流,求得系统电压后即进入下一时步,用所求得的各节点电压进行柔性直流和新能源的下一时步求解。此时网络求解中没有直接的电压控制模型,且缺乏节点电压和动态设备注入电流的迭代求解,较容易产生数值振荡,造成仿真系统的无故障电压振荡,如图4所示。本文所立模型主要针对该振荡问题进行改进。

图4 无故障仿真电压振荡仿真结果Fig.4 Simulation result of voltage oscillation without fault
在Vf控制模式下,MMC通过电压调制,控制换流器输出的阀侧电压,进而控制换流母线电压幅值和频率恒定,可将MMC的实际控制过程可看作受控电压源串联换流变压器阻抗连接至换流母线。阀侧电压参考值由内环控制器给出,因此,在建模中考虑柔性直流内环控制,建立柔性直流Vf控制的“受控电压源+阻抗”的戴维南等值模型,控制系统模型和接入系统模型分别如图5和图6所示,其中:R、X分别为换流变压器的电阻、电抗,Ueq=Udref+jUqref。
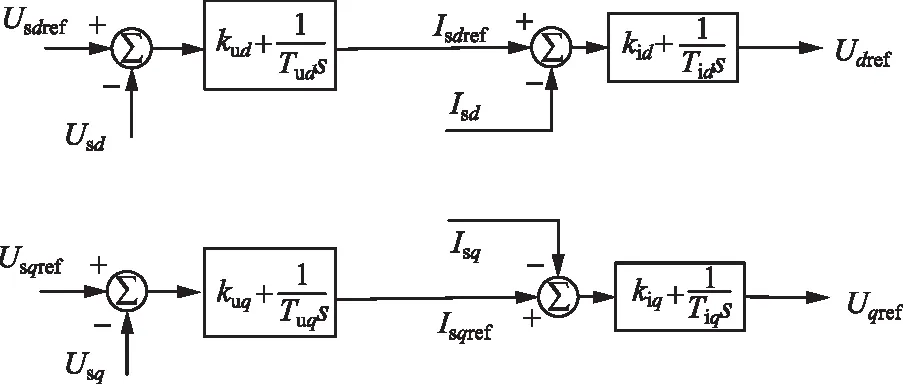
图5 柔性直流Vf控制系统模型框图Fig.5 Model block diagram of MMC-HVDC Vf control system

图6 接入风光新能源基地的柔性直流模型示意Fig.6 Schematic diagram of MMC-HVDC model connected to wind power and PV station
图5中Isd、Isq由式(5)计算得到:
(5)
3 风电和光伏发电系统机电暂态模型
本文新能源发电系统考虑直驱风电机组和光伏发电系统,2类新能源发电系统均由全功率变流器接入交流网络,其控制策略与柔性直流类似,均包括外环控制和内环控制。不同的是新能源发电系统采用电网电压定向的跟网型控制策略,其坐标变换采用与电网电压同速率旋转的dq坐标系[14-26]。新能源发电系统的机电暂态模型已有成熟方法,本文不再赘述。因新能源发电系统与柔性直流均采用电压源变流器,其模型可参考如图3所示的柔性直流接入大电网模型,仅考虑新能源发电系统变流器的外环控制器,受控电流源数值为外环控制器的输出。
考虑柔性直流和新能源的接入系统模型后,式(2)网络方程变为
(6)

4 算例分析
4.1 算例介绍
利用DSP机电暂态仿真软件,构建风电、光伏经双极柔性直流送出算例系统,应用本文所提出的方法进行机电暂态建模仿真,算例系统及初始潮流如图7所示。

图7 算例系统及初始潮流Fig.7 Example system and initial power flow
算例系统参数见表1,表中标幺值的基准容量为100 MVA,基准电压为设备额定电压。

表1 算例系统参数Tab. 1 Example system parameters
4.2 模型准确性验证
基于图7所示算例系统,在PSCAD/EMTDC软件中搭建相同参数与控制策略的电磁暂态仿真模型,将本文所建立的模型与EMTDC软件进行对比,验证本文所建立模型的准确性。为排除可能存在的干扰因素,分别对比柔性直流输电系统和新能源发电系统模型,在对比柔性直流模型时,将算例系统中送端新能源替换为恒阻抗负荷,恒阻抗中电阻值为负,代表发出有功功率。新能源发电系统的对比以光伏为例,在对比光伏发电系统模型时,将柔性直流替换为无穷大电源。
分别对比换流母线发生三相短路情况下柔性直流Vf控制模型和光伏发电系统的动态响应,如图8和图9所示。可以看出:在稳态情况下,本文所建立模型的响应与EMTDC基本相同;在暂态过程中,柔性直流有功功率、d轴电流、d轴电压,光伏发电系统有功功率、无功功率、直流侧电压等变量的变化趋势基本相同,证明了本文所建立模型的准确性。


图8 换流母线电压跌落至0.4时柔性直流Vf控制模型响应对比Fig.8 Comparison of the response of MMC-HVDC Vf control model when PCC voltage drops to 0.4 p.u.


图9 并网点电压跌落至0时光伏发电系统响应对比Fig.9 Comparison of the response of PV station when the voltage at PCC drops to 0
4.3 新能源场站功率波动仿真分析
仿真时长共10 s,初始工况如图7所示,在1 s时,将光伏电站1(有功出力315 MW)从系统中切除,模拟光伏出力的突然减少,柔性直流各变量响应如图10所示。可以看出:在1 s切除光伏电站1后,光伏电站1的有功功率从315 MW快速降低到0,柔性直流换流站1输送功率从2 500 MW左右下降至2 200 MW左右,动态过程持续大约1 s;换流站1换流母线电压d、q轴分量在经过约1 s的波动后维持在原目标值。柔性直流d、q轴电压和有功功率等的变化过程符合预期,证明了所建立模型能够跟随新能源的功率波动,将换流母线电压幅值和频率维持在设定值。


图10 光伏功率波动下柔性直流输电系统响应Fig.10 Response of MMC-HVDC under PV station power fluctuation
4.4 短路故障仿真分析
仿真时长共10 s,初始工况如图7所示,在1 s时,在500 kV风电汇集站—送端换流母线线路上设置三相短路故障,1.1 s时切除500 kV风电汇集站—送端换流母线1回线,三相短路消失,柔性直流、风电场各变量响应如图11所示。可以看出:在1 s发生三相短路后,500 kV风电汇集站电压跌落至0,风电场进入低电压穿越,有功功率跌落至0附近,故障消失后,风电场功率以一定速率恢复,约1 s后恢复至故障前数值;短路故障后,换流站1换流母线电压跌落至0.3,d轴电压随电压幅值迅速下降至0附近,故障消失后逐步恢复至故障前目标值,q轴电压在故障期间逐渐增大至与电压幅值接近,在故障消失后逐步降低至故障前目标值,换流站1有功功率在故障期间降低到0附近,故障消失后逐步恢复,因柔性直流需跟随风光系统的功率波动,其功率恢复速度与风电场低穿后有功恢复速度接近。从仿真结果可以看出,在短路故障消失后,柔性直流可以维持d、q轴电压在目标值,并能够持续跟踪系统的功率变化输出有功功率,证明了所建立模型在短路故障等大扰动下的适应性。

图11 短路故障下柔性直流输电系统响应Fig.11 Response of MMC-HVDC in the event of three phase fault
5 结束语
本文针对风光新能源经柔性直流送出系统的机电暂态建模仿真需求,分析了在该场景下风电、光伏、柔性直流输电系统的基本控制原理,提出了柔性直流Vf控制等效为“受控电压源+阻抗”的戴维南电路和风光发电系统等效为受控电流源的接入网络仿真模型。应用DSP软件开发完成所提出的仿真模型,构建了风电场、光伏电站经双极柔性直流输电系统送出的测试案例,测试所建立模型在新能源功率波动、短路故障等系统常见扰动下的响应特性。仿真结果表明所建立模型的仿真结果符合预期,能够在各类扰动下控制系统电压和频率为恒定值,验证了本文所提建模方法的有效性。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
大电机技术(2021年5期)2021-11-04
文化创新比较研究(2020年7期)2021-01-13
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年6期)2019-08-23
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
电子测试(2017年23期)2017-04-04
电力工程技术(2014年5期)2014-03-20
