隐藏式外开手柄控制系统的技术研究
2023-12-07 14:43杨钧亓欢宁覃延益
汽车与驾驶维修(维修版) 2023年11期
关键词:控制方法
杨钧 亓欢宁 覃延益


摘要:文章研究对象为平推式隐藏外开手柄的控制系统,首先是阐述了隐藏外开手柄的工作原理、结构特点及其在实车的多种运行工况,说明了传统隐藏手柄控制方法存在的信号精度差导致控制不准确的问题,笔者以解决传统隐藏手柄控制方法信号精度差导致控制不准确问题作为目标,通过梳理控制系统的原理及控制逻辑,并从硬件层面着手,增加霍尔器件,使信号得到更精确的反馈,并提出新的控制逻辑,在实际工程中应用,希望能给予相关从业工程师以借鉴。
关键词:隐藏手柄;车门控制;控制方法;控制模块
中图分类号: U463.85+4 文献标识码:A
0 引言
外开手柄在汽车上是乘客首先看到和触摸到的重要功能件,承载着车门开启和外观造型双重要求[1]。近年来,汽车技术迅猛发展,电动化、智能化成为汽车的重要趋势,隐藏式外开手柄的设计和应用尤其常见,被应用到越来越多的在新车型中。
隐藏式外开手柄属机电一体化产品,结构较传统手柄复杂。而且,隐藏式外开手柄在车辆的不同场景中都要保证控制的合理性、可靠性,这点尤为重要。如何提高隐藏式门手柄的易用性、安全性,避免用户使用过程中发生身体伤害的风险,除了结构设计以外,关键因素是隐藏式门手柄的控制方法,因此这是技术人员亟待研究探讨的重要领域。
1 隐藏式外开手柄结构及原理
隐藏式外开手柄,顾名思义是一种可以隐藏的外开手柄。在不需要使用车门外开手柄时,整个外开手柄隐藏于车门中,外开手柄与车门外板曲面保持一致,犹如门板的一部分,感知好,能有效减小风阻和降低风噪。当需要使用手柄开启车门时,手柄可以伸出足够空间供乘员抓握,解锁并开启车门。目前,按手柄伸出时运动形式分,主要存在两种类型:旋出式外开手柄和平推式外开手柄[2](图1)。本文主要对平推式外开手柄进行研究。
隐藏式外开手柄共有3 个位置。第一个位置为隐藏位置,该位置为隐藏手柄未动作时的缩回状态,手柄与外板平齐。第二个位置为平推展开预拉位置,该位置是手柄接收到相关信号,通过电执行器驱动手柄内部机構运动,使手柄展开到与门外板平行位置,提供足够空间供乘员抓握。第三个位置为解锁位置,该位置在外力作用下,拉动手柄进行旋转运动,通过内部机构把运动传递给车门门锁,达到解开车门门锁的目的,进而打开车门。其控制策略如下。
当乘客按下手柄上的微动开关触发,把解锁请求信号发送到控制模块,无钥匙进入系统给出低频天线驱动信号到手柄上的无钥匙进入天线,天线识别到乘客身上带的电子钥匙,认证成功。随后控制模块给手柄执行器发出驱动电信号,手柄执行器动作,推动手柄机构运动,手柄弹出,乘客拉动手柄,即解锁车门。另外,直接按电子钥匙上的解锁键,也可发出解锁信号给控制模块,进而驱动手柄弹出(图2)。
2 传统隐藏式手柄控制及存在问题
隐藏式手柄控制的关键,是在隐藏位置和展开位置能够给出准确的开关信号。传统隐藏手柄是通过在这2 个位置上分别设置2 个微动开关进行位置识别。具体控制过程为:控制模块收到手柄展开指令,给手柄执行器电机通电。电机转动驱动手柄伸出,当伸到完全展开位置时触发微动开关,输出信号给控制模块。控制模块收到信号,认为手柄已经到达完全展开位置,随即关闭给执行器电机的通电,使手柄处于完全展开位置。同理,当手柄需要收回隐藏时,手柄运动到隐藏位置触发微动开关。控制模块收到位置开关信号,进而执行电机断电,使手柄处于隐藏位置。上述控制过程是在理想状态下,隐藏手柄能准确地伸出和收回。在实际执行过程中,常见以下3 个技术问题。
2.1 制造误差导致的信号误差
由于微动开关安装在手柄壳体上,不可避免产生制造及装配误差,这些误差会导致机械运动与开关信号的不同步。通常表现为当手柄已经运动到完全展开位置时,仍未收到位置开关信号,电机仍会继续通电工作,会造成电机进入过热保护,导致功能发生异常。
2.2 微动开关信号不准确
隐藏式手柄一般会设置破冰模式,即手柄因为冰冻未能完全打开,微动开关未触发时,会持续不断执行电机转动,直到破冰成功,触发展开位置开关。当微动开关信号不准确时,电机会持续进入破冰模式,表现为手柄一直在执行“收回—展开”的故障运动。
2.3 微动开关信号不同步
由于全车4 个车门手柄的微动开关信号不同步,导致控制4个手柄在展开和收回时动作不一致,给用户带来困扰。
另外,传统平推隐藏式手柄在实际使用中可能存在安全问题。传统平推隐藏式手柄无碰撞自动弹出手柄功能,当车辆遭受意外碰撞时,不能自行地弹出手柄供用户开启车门[3]。这时需要用户手动按压手柄,通过机械的手段来拉开手柄,进而打开车门,给车辆救援造成难度,降低了用户使用的安全性。
3 优化后的控制原理
优化后的隐藏式外开手柄执行器电机增加了霍尔传感器,不用微动开关进行位置判断。霍尔传感器设置于隐藏式外开手柄的驱动电机内部。当驱动电机的电枢转动时,其上的磁环会在霍尔传感器周围产生变换的磁场,霍尔传感器将变换的磁场转化为具有一定周期的方波,可以准确地判断电机运行圈数,通过计算可以知道手柄在伸出过程中的电机行程,进而获得霍尔数。控制模块通过计算霍尔数,可以准确地控制电机的停转,使手柄的整个运动过程更加准确稳定。
目前,隐藏式手柄普遍配合无钥匙进入天线或UWB 等技术进行使用。当用户接近车门时,手柄从隐藏状态平出至展开状态。通常整车控制模块(BCM)中几路信号已集成了所述的控制模块功能,当然控制模块也可独立或集成到车门控制模块下。
下面以控制模块集成在BCM 为例,对无钥匙进入的控制逻辑进行说明(图3)。乘客按下手柄上的请求开关(微动/ 电容)触发,把解锁请求信号发送到无钥匙进入系统。系统给出低频天线驱动信号到手柄上的无钥匙进入天线,天线识别到乘客身上带的电子钥匙,认证成功。随后BCM 给手柄执行器发出驱动电信号,手柄执行器动作。机械部分表现为推动手柄四连杆机构运动,手柄弹出,乘客拉动手柄,即解锁车门。另外,直接按电子钥匙上的解锁键,也可发出解锁信号给BCM,进而驱动手柄弹出。
4 控制逻辑
结合前文所述运行工况,当用户靠近汽车时,车内的传感器从钥匙处感应信号,给隐藏手柄的驱动单元信号。驱动单元驱动手柄主体向车外弹开,达到了手柄自动弹开的效果。随后用户拉动手柄,转动块转动后带动车门拉锁,车门开启后可进入车内。当用户离开或者起动汽车后,驱动单元接收到信号,反转电机。手柄在弹簧的作用下缩回到原来位置,达到了自动缩回的效果[4]。
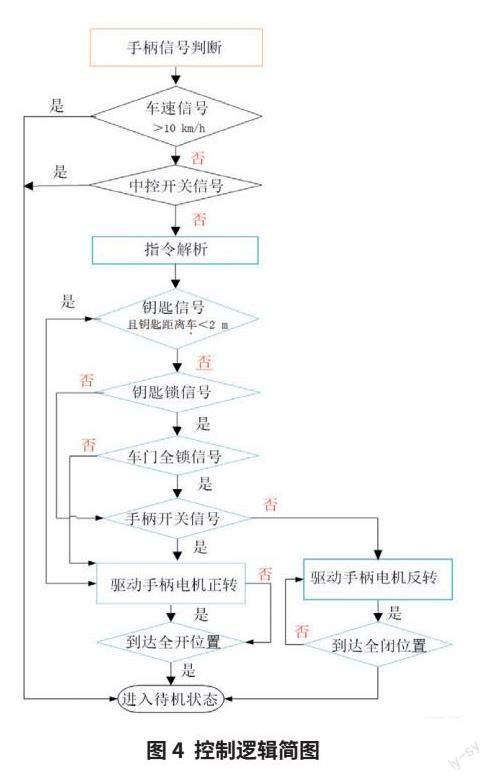
整个过程主要依靠BCM 的软件进行控制。在整车应用中,还需考虑汽车行驶速度、中控开关等信号进行条件判断。同时,在此控制逻辑的基础上,可以增加碰撞弹出手柄的功能。控制模块把碰撞信号设置为优先级最高的请求信号,当收到车辆碰撞信号时,第一时间执行碰撞信号的请求。为确保伸出手柄伸出执行到位,一共輸出3 次隐藏手柄电机通电,然后通过霍尔信号的反馈,使手柄可以准确无误地伸出,确保可以安全地打开车门(图4)。
上述控制基于实车中的单门,但实际上整车4 门的控制会因机构生产制造的偏差,负载有一定的差异,会有4 门手柄伸缩时不同步的问题。因此,还需考虑到4门中每个手柄运行的同步性,提升这方面的用户体验。从实现的原理,对此问题的方案一般可以根据采集到的霍尔信号、电流信号和纹波信号等,对信号做出判断,看是否对其中某个手柄的电机进行电流补偿,以此保证4 门手柄伸缩时同步。
就目前行业现状并结合电气的可靠性、成本等综合考虑,采用霍尔信号的方案具有很强的可行性。下面对霍尔信号的采集原理进行简要阐述。
通过采集霍尔信号,判断隐藏式门手柄在缩进过程中是否碰触到障碍物,可以实现防夹功能,提升用户的安全。在隐藏式门手柄向汽车内侧方向移动的过程中,即隐藏式门手柄缩进过程中,控制模块中的微处理器(MCU,Micro Control Unit)实时接收霍尔检测电路发送的驱动电机的霍尔信号,并对接收到的霍尔信号进行分析,判断该隐藏式门手柄在缩进过程中是否碰触到障碍物,例如是否碰触到人手(图5)。
MCU 可以通过测量方波信号的周期,来判断隐藏式门手柄在缩进过程中是否碰触到障碍物。若隐藏式门手柄在缩进过程中碰触到了障碍物,MCU 立即执行防夹程序,向驱动电路发送驱动指令,通过控制驱动电机反方向转动,来驱动隐藏式门手柄向相反方向移动预设大小的距离,即驱动隐藏式门手柄弹出预设大小的距离。其中,预设大小的距离具体数值可以根据实际需要设置,达到防夹的目的即可。
驱动电路主要用于根据MCU 的控制指令,控制驱动电机的正转与反转。驱动电路具体可以采用继电器控制电路,通过该继电器控制电路的接通与断开状态,实现对驱动电机不同转动方向的控制,从而在满足上述对驱动电机转动方向控制的同时,有效降低制作成本(图6)。
5 结束语
本文阐述了传统的汽车隐藏式门手柄的控制方法以及存在的问题。笔者通过自己的实践,提出一种优化当前控制方法的方案,使得整个隐藏手柄在运行过程中更加平稳准确。另外可以及时获知隐藏式门手柄在缩进过程中是否碰触到障碍物,并在碰触到障碍物时及时采取措施,防止门手柄缩进对碰触者造成身体伤害,提高了汽车隐藏式门手柄的安全性。同时弹出时如遇到结冰等外部较大阻力时,识别外部条件异常,避免强行弹出手柄,达到保护自身系统功能的目的。
隐藏式外开手柄作为一种汽车新兴技术已经被越来越多的主机厂应用,随着汽车设计水平与生产工艺的不断提升,也逐渐成为汽车、特别是新能源汽车的手柄主流,除了基础的良好结构设计,还要有完善的控制方法,这样才能给乘客智能进入车内带来更好的体验。
【参考文献】
[1] 金云光, 丁光学, 朱伟. 浅谈车门外手柄开启力的设计与计算[J]. 汽车实用技术,2017(05):10-12.
[2] 刘美丽, 班正逸, 欧阳明. 车门外手柄设计开发[J]. 汽车实用技术,2014(05):32-36.
[3] 杜保华, 丁光学. 车门手柄耐碰撞能力的设计分析与应用[J]. 汽车实用技术,2017(16):120-123.
[4] 沈颂阳.F 型隐藏式门把手控制与潜在失效模式[J]. 内燃机与配件,2020,(17): 60-62.
作者简介:
杨钧,本科,工程师,研究方向为车门附件。
亓欢宁,本科,工程师,研究方向为车门附件。
覃延益,本科,工程师,研究方向为车门附件。
猜你喜欢
中国集体经济(2016年34期)2017-01-05
建筑建材装饰(2016年13期)2017-01-04
建筑建材装饰(2016年10期)2017-01-03
建筑建材装饰(2016年8期)2016-12-29
科学与财富(2016年29期)2016-12-27
居业(2016年9期)2016-12-26
文艺生活·中旬刊(2016年11期)2016-12-13
企业技术开发·下旬刊(2016年9期)2016-11-23
中国集体经济(2016年26期)2016-11-19
中小企业管理与科技·下旬刊(2016年10期)2016-11-18