提升ETC专用车道一次性通过率技术浅析
2023-12-07 01:35闫磊
山西交通科技 2023年4期
闫 磊
(山西交通控股集团有限公司中部高速公路分公司,山西太原 030000)
取消高速公路省界收费站之后,实现了全国联网,客、货车辆在收费站能实现不停车通行,但是车辆有时在ETC 专道不能一次性通过,给司乘人员带来不好的体验感。现在技术研究的主要方向是增大客户OBU的功率和降低路侧天线的功率,虽然可以解决部分邻道干扰,但不能完全消除其影响。现唯有通过车道地感线圈与路侧天线配合,并结合车道工控机设备和黑名单及时下载等技术手段和方法,才能彻底提高ETC车道一次性通过率。
1 车辆在ETC专用车道不能一次性通过现状
山西交通控股集团有限公司中部高速公路分公司太原片区共有231 条车道,其中ETC 专用车道有95 条,混合车道有86 条,人工车道有50 条。现在太原片区联网收费系统运行日趋平稳,路网运行秩序井然,ETC 用户保有量逐渐增加,ETC 专道的使用明显增加,然而车辆有时在ETC 专道不能一次性地通过,给收费站的日常管理带来诸多不便,而且也会产生投诉问题。只有提升ETC 专用车道一次性通行率,才能有效提升ETC客户的体验感和满意度,提高服务水平,为社会的经济发展提供推动力[1]。
2 影响车辆在ETC 专用车道不能一次性通过因素
通过对太原片区95 条ETC 专用车道1 天内不能一次性通过的车辆进行统计分析,其影响因素主要包括用户标签无卡、用户黑名单、用户余额不足、卡片过期、防爆膜[2]、邻道干扰、车道软硬件配置过低等7 项问题。其中前5 项属于人为因素,通过管理可以解决,而邻道干扰、车道软硬件配置问题需要通过技术方面解决。
2.1 邻道干扰
当ETC 车辆驶入车道在进行车辆识别时,有时会有邻道干扰的情况发生。邻道干扰,是指正在行驶车辆的车道路侧天线扫射到临近车道,引起该车道上方的路侧天线与临近车道上OBU 发生错误交易。邻道干扰的主要表现形式为临近2 个或3 个车道的路侧天线识别到同一辆车的OBU 信号,错误的交易数据进入了收费软件处理流程,引起了后续收费软件信息处置错误。邻道干扰的产生,其根本原因为路侧天线扫射范围过大,超过了车道3.5 的宽度。此现象通常会发生在多条并排的ETC 车道,当车辆出现高峰时期,则特别严重。如果天线在识别电子标签OBU 的过程中对相邻车道发生误读或者有干扰的现象,就会导致装有ETC 的车辆不能一次性通过车道。
2.2 邻道干扰原因分析
2.2.1 车道现状
ETC 车道主要由车道控制器、天线、高清车牌图像识别设备、自动栏杆、手动栏杆、费额显示屏、雨棚信号灯、雾灯、车道摄像机、车辆检测器等组成,车道设备布置如图1所示。

图1 ETC车道设备布局示意图
经对部分收费站调研发现:
a)关于地感线圈 太原片区各收费站地感线圈的布设,分别有1+1 布局、2+1 布局和3+1 布局,更有个别控制天线的交易线圈只有1 个。按照行业经验,线圈的间距最好是2.5 m,但是目前线圈的间距从小于2.5 m到超过6.5 m 的都存在。
b)关于天线 相控天线可以有效识别交易车辆的位置,从而可以精确控制队列,目前车道虽然采用了相控天线,但是由于线圈布设数量和现有软件无法配合完成车辆队列的控制,导致相控天线无法发挥应有的作用。
2.2.2 存在的问题
车道采用2+1、3+1 的线圈布设时,天线的交易范围较小只有7~10 m,1+1 时交易范围更小,使车辆在通过时需要有明显的降速,严重影响了ETC 车辆的过车效率。交易范围较小也会导致车辆在交易区域内未交易成功从而需要车辆倒车重新交易。
无交易队列控制或交易队列控制不够精确,整体的过程逻辑混乱,错放漏放车辆经常发生。主要原因:一是线圈间隔的不规范导致车道无法精准控制车辆队列,例如:当间隔大于6 m 时,车辆从线圈间隔处驶入或驶出车道,车道无法识别到车道内有多少辆车,也无法识别车道内车辆的行驶路线,从而车道无法按序控制交易、抬杆逻辑;二是车道采用的虽是相控天线,因线圈布设不足无法识别车辆位置,导致车道无法通过队列、车辆行驶位置与天线交易车辆位置进行核对,不能发现交易车辆所在队列位置,从而无法按序控制交易、抬杆逻辑。
3 提升车辆ETC 专用车道一次性通过率技术方案
3.1 优化目标
增大天线交易的交易范围,在车辆距离栏杆远处就能完成交易并完成抬杆动作,使车辆能高速通过,提升车道的通行效率,平均通行速度可由20 km∕h(不同车道的通行效率差异较大,普遍在10 km∕h 至20 km∕h)提升至30 km∕h 以上。
增大天线交易的交易范围,保障车辆能在高速行驶的情况下在交易区间内完成交易,增加ETC 车辆一次通过率。完善、加强车道交易队列控制,将错放、漏放车辆事件的概率降到最低,保证收费站的通行秩序,降低收费站的损失。
3.2 克服邻道干扰优化方案
为了提高ETC 车道的通行速度,针对栏杆前置ETC 专道进行优化升级改造。总体方案采用从车道布局和软件两个方面进行优化调整。软件配合车道布局及设备所需要的适应性进行调整升级,同时也要保证ETC 通行车道尽量不处在弯道上[3]。路侧天线RSU 的扫射范围内布设5 个感应线圈,感应线圈宽度为1.5 m左右,间隔为2.5 m 左右,目的是识别正在行驶车辆的前后位置关系。路侧天线根据车辆OBU 位置信息与感应线圈位置相互识别,对正在行驶车辆的OBU 位置进行预判断,可以有效处置ETC 车道邻道和跟车干扰问题。要把OBU 的灵敏度和发射功率设置在国家标准范围,确保所采购OBU 的灵敏度保持一致[4]。设置中,可采用增加路侧天线到栏杆机间距L,使最远端感应线圈d1 与栏杆机的间距大于17 m,调整栏杆机抬杆参数,提高车辆行驶速度。天线地感线圈布置如图2所示。
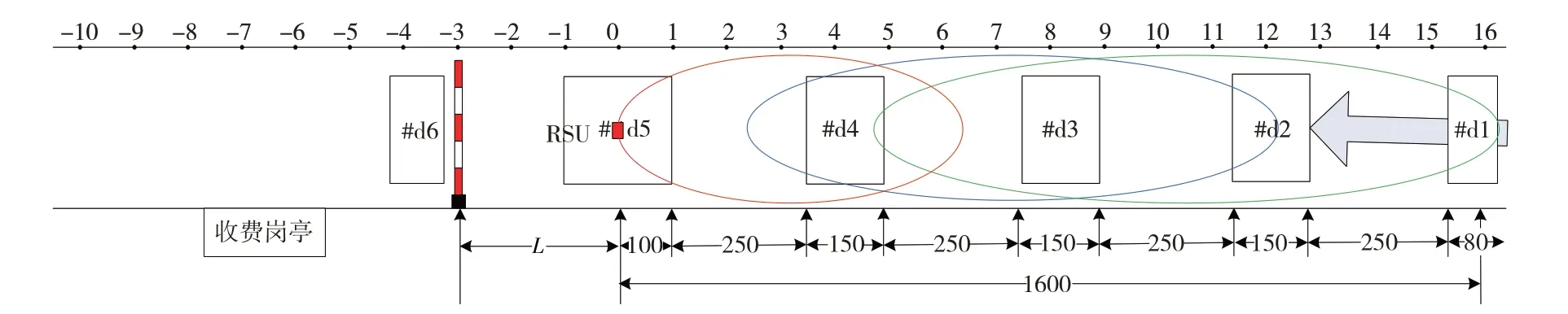
图2 天线感应线圈布置示意图(单位:cm)
3.2.1 相控阵天线覆盖区域
车道属于全新的相控阵车道布局,为了满足二代相控阵天线覆盖区域远区16 m,最远线圈距离栏杆机距离可达17 m,增加ETC 用户快速通车的体验感。天线交易区域辐射分近、中、远(近:0.5~6.5 m;中:2.0~10 m;远:4.0~16 m)。
3.2.2 地感线圈作用
#d1 线圈为开天线,默认切换天线至远区;#d2 线圈为存在线圈,确认车辆队列;#d3 线圈为存在线圈,同时也触发切换天线至中区;#d4 线圈为存在线圈,同时也触发切换天线至近区;#d5 线圈为存在线圈,确认是否存在无标签车;#d6 线圈为驶离线圈,车辆驶离车道。
3.2.3 邻道干扰解决方案
相控阵天线通过雷达可调整天线扫射区域。不是正行驶在此车道扫射范围的均为旁道,通过雷达扫射将旁道的错误信号剔除,仅仅和此车道OBU 进行交易。如图3,根据雷达扫射将该车道通信区域1 的横向范围设置为±1.7 m,则路侧天线通过雷达扫射识别OBU2 在该车道外,OBU1 在该车道行驶,则路侧天线与OBU1进行交易,不与其他车辆OBU 交易,解决此干扰问题。
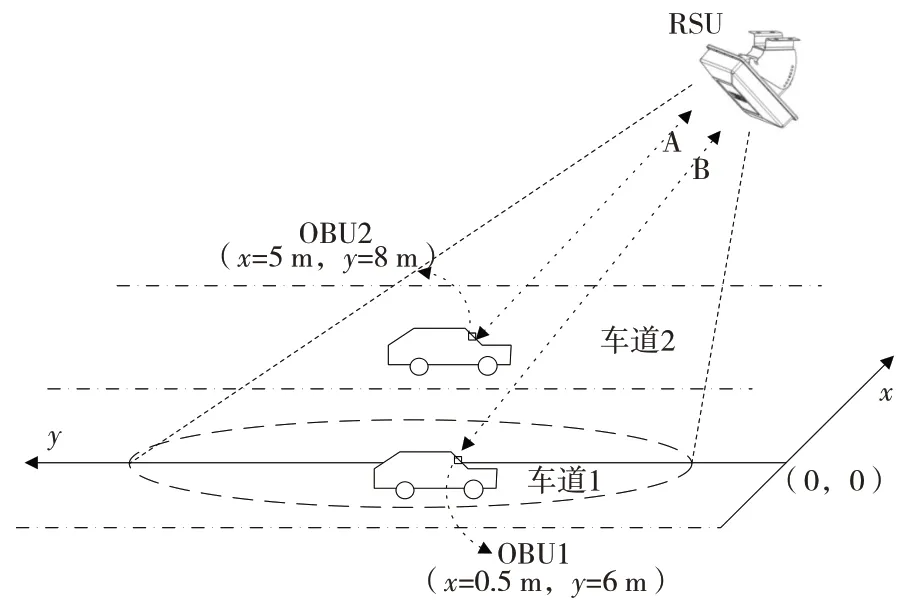
图3 交易处理图
3.2.4 跟车干扰处理方案
相控阵雷达扫描与行驶车道OBU 交互的结果,可识别此车道正在行驶ETC 车辆的前后位置关系,以此判断路侧天线与车辆OBU 交易的前后顺序。如图4,车辆1 在车辆2 之前,因此OBU1 在OBU2 之前,则路侧天线根据雷达扫描结果和车辆1 先交易,然后再和车辆2 进行交易,这样可消除跟车干扰现象。
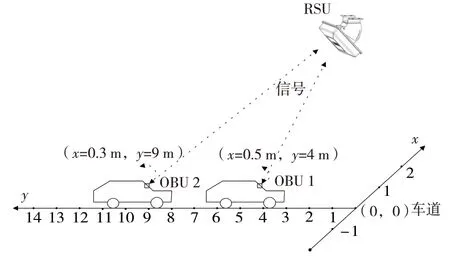
图4 跟车干扰图示
没有OBU 车辆使用ETC 车道,可根据感应线圈判断。如图5,第一辆无标签,第二辆车有OBU。第二辆车位置与车道感应线圈触发不吻合,因此不能交易,可解决无OBU 车辆跟车干扰问题。
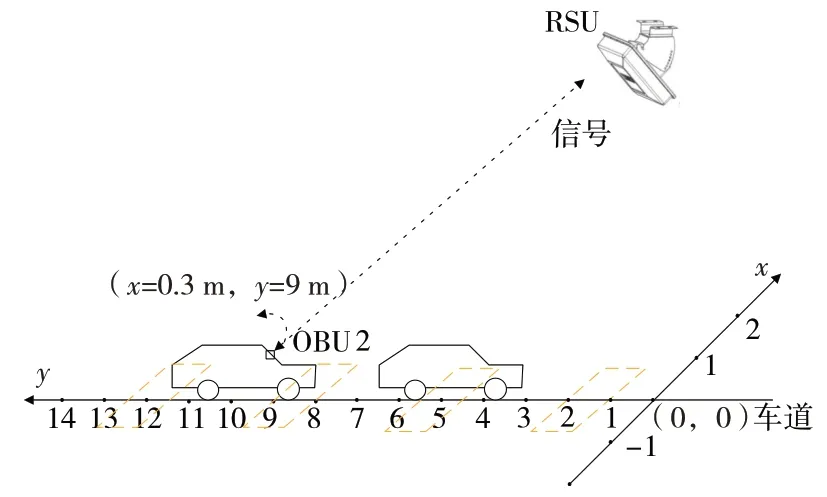
图5 无标签车辆跟车干扰处理示意图
跟车干扰的逻辑判断可以由RSU 来处理,也可以由车道软件来处理。以下介绍两种跟车干扰处理方案。
3.2.4.1 由天线处理跟车干扰
车道控制器实时监测ETC 车道中地感状态,当地感状态变化时车道控制器发送给车道机,车道机立即发送当前地感状态信息给RSU。RSU 通过地感状态变化,判断是否和当前处理的OBU 坐标匹配,如果匹配则继续交易,如果不匹配拒绝交易。该方案中RSU 区域根据车道软件发送上来的地感状态,进行远近中区切换。
3.2.4.2 由收费软件处理跟车干扰
来车到达触发线圈时远区或中区天线打开,到达切换线圈打开近区天线。当近区有OBU 交易或等待交易的OBU,来车完成交易离开车道时天线不能切换到远区天线;交易过程中,天线向收费软件提供OBU 的位置,此位置信息为OBU 扣款前所在位置的二维坐标(x,y)。当通讯区域内存在多个车辆时,车道软件根据车辆触发地感线圈的状态以及OBU 的坐标信息进行位置合法性判断,当车辆位置与OBU 坐标不匹配时拒绝交易,通过这种方式彻底解决跟车干扰和邻道干扰问题。由于车辆的速度不同,以及地感线圈有不同的触发延时,所以需要设置合理的位置,进行合法性判断,方案为:车辆触发远端第1 个地感线圈时,OBU 位置合法判断依据为±3.5 m;车辆触发远端第2 个地感线圈时,OBU 位置合法判断依据为±2.5 m;车辆触发远端第3、4、5个地感线圈时,OBU 位置合法判断依据为±2 m[5]。
3.3 车道软硬件解决方案
取消省界收费站后,收费模式变为全国联网收费,因此全国的黑名单数据、新增OBU 数据、ETC 卡数据名单要及时更新。将这些数据实时下载到收费车道。通过统计当前太原片区路段的黑名单数据、新增OBU 数据、ETC 卡数据的容量大小在2 G 左右。现在的一些老旧ETC 车道设备性能低下,不能满足此要求。
要想保证数据实时下载的同时,还要进行车道交易,需要提高工控机的配置,达到CPU i5 及以上,固态硬盘512 G,内存8 G 以上,网卡为千兆网卡,车道的网线配置为超六类以上。软件设置全国的黑名单数据、新增OBU 数据、ETC 卡数据名单要及时更新,做到每5 min 更新一次,如图6所示。
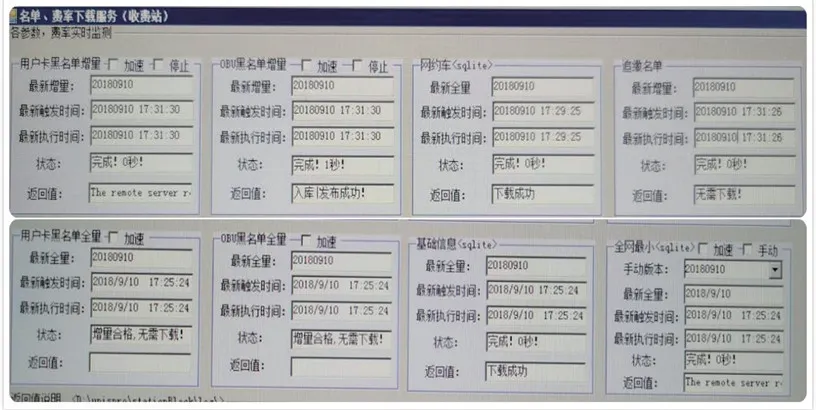
图6 状态名单下载明细
4 结语
通过以上各种方案能有效提高车辆ETC 专用车道一次性通过率,尽可能为广大用户提供畅通、便捷、安全、高效的出行服务。
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
中国交通信息化(2022年7期)2022-10-27
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
中国交通信息化(2019年2期)2019-03-25
军营文化天地(2018年2期)2018-12-15
专用汽车(2018年10期)2018-11-02
产品可靠性报告(2017年7期)2017-09-05
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
专用车与零部件(2016年6期)2016-03-13