公路行道树木自动刷白车改良设计
2023-12-04 11:11臧晓航程旭锋
林业机械与木工设备 2023年9期
臧晓航, 程旭锋
(北京林业大学,北京 100083)
树干涂白措施一般由政府绿化部门通过在树干底部喷施或刷涂大树涂白剂的方式进行涂白作业,涂白每年进行两次,分别在落叶后和早春进行,涂白工作通常需要尽快完成。2017年3月的数据显示,北京市需涂白树干155.2万株,集中且繁重的任务给园林绿化部门带来压力,在人工工资只增不减的情况下,常以招募志愿者的方式辅助进行,园林绿化领域的投入仍然逐年增加。涂白具有任务量大和重复性高的特点,使用机器成为更佳策略,快速形成树干保护膜,且可以与杀虫、杀菌剂混用[1],优于人工涂刷效果[2-3]。
1 研究现状
目前部分国内的专利与学术论文,设计重点在于使用半自动机器喷涂,人工辅助移动、操作机器,但该类产品存在整机重量较大、树干适应能力弱、美观性欠佳的问题。本文计划完成一套公路行道树木自动刷白车改良设计实例,结合自动驾驶汽车底盘实现自动化刷白,解放人力。实现智慧化刷白,利用现有的树木识别技术辨认行道树,借助GPS为行道树建立电子档案[4]。创新设计具有自适应性的树干喷涂头,针对非标准树干径、弯曲的树木仍有实用效果。推动产品与环境融合,深入设计树木刷白车的外观,增强设备的亲切感、易用性、装饰性,改良人、机器、环境三者之间的关系。
2 自动刷白车系统设计
自动刷白车系统整体结构由底盘、喷涂系统、涂料箱、智慧控制系统、外壳五部分组成。
2.1 底盘
本设计中刷白车的底盘开发套件来自百度“Apollo”的汽车行业及自动驾驶领域软件平台的自动驾驶开发套件D-KIT系列中的Lite s车辆,如图1。该车辆为可自由搭载的自动驾驶车辆底盘套件,行驶时可以根据周边环境情况,进行最优路径规划,并预测周边车辆、行人的意图, 作出决策[5-6]。目前,机器视觉已经被广泛地应用于工业、智能交通、无人驾驶等多个领域,拥有较为成熟的经验[7]。将刷白车功能模型建立在该自动驾驶套件上有助于根据预设的路径和地图自主导航,完成无人看管树木刷白。

图1 Lite s 车辆底盘开发套件(图片来源:Apollo.baidu.com)
2.2 喷涂系统
喷涂爪和直线导轨两部分组成喷涂系统,其中喷涂爪由液压泵、齿条、半圆爪机、传感轮、喷头和喷管这5部分构成。
2.2.1 喷涂爪
树干具有局部突出、上下周长不同的特征,因此市面上大部分直径固定的树木喷涂爪不能喷白全部树干,只能依赖人工补刷。本设计加入了传感轮和联动齿轮,使其本身可一定范围内调整机械爪张开角度,即时改变喷涂半径,使喷涂爪具备树干自适应功能,良好解决了树围变化的难题。如图2,喷涂爪的作业过程为:喷涂爪先张开并贴近树干,随后半圆爪机闭合至包围树干,接下来连接涂料箱的喷管会将涂料通过压力喷头大范围喷出进行刷白,整个喷涂爪沿导轨向下移动,为整棵树干喷白。
喷涂爪包括以下几个重要部件:液压泵(A)、齿条(B)、装有压力传感器的大传感轮(C)、末端为齿轮的半圆爪机(D)、装有压力传感器的小传感轮(E),如图3、图4所示。
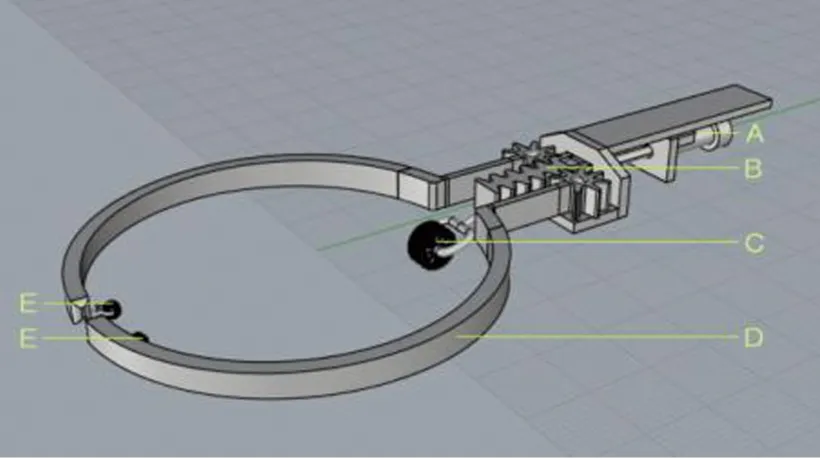
图3 喷涂爪模型图片

图4 喷涂爪模型三视图
液压泵(A)与中间的鱼骨形齿条(B)相连接,当液压杆向外伸出时,齿条送出,半圆爪机(D)各自张开。反之,半圆爪机合拢。因此通过液压泵运动可实现两个半圆爪机的收紧和张开。
装有压力传感器的传感轮共三个,分别是一个大传感轮和两个小传感轮,都与树干滚动接触。大传感轮(C)的功能之一为协助喷涂爪伸出至适宜位置,C与齿条(B)相连,位于喷涂爪的核心位置。在喷涂爪靠近树干的过程中,C与树干接触产生压强,停止喷涂爪。C的功能之二为机械撬杆,斜向下30°的C在喷涂时面对树围增大的情况,C会被下压并后缩,并带动齿条B后缩,使相切的齿轮转动,促使两只半圆爪机D张开。在一定范围内,C后缩越大,机械爪张开角度越大。
两个小传感轮(E)位于半圆爪机的端点内侧,具有辅助机械爪收拢至适宜位置的功能,该功能针对树围大于喷涂直径的情况,如图5。按照海淀区行道树树围标准,超大树围的树干属于少数,进行局部喷涂后,刷白车定位标记该树木,待人工补刷,不影响刷白车工作效率。

图5 大树围喷涂
2.2.2 直线导轨
用来支撑和引导喷涂爪运动的直线导轨,按照移动方向可分为升降导轨和伸缩导轨,分别操控喷涂爪的喷涂高度和树车距离。升降导轨竖直外挂于车体右侧,作用为承载喷白作业的喷涂爪,工作时带动喷涂爪沿轨道自上至下喷涂,运动范围为20~120 cm处,防止导轨触地剐蹭造成损伤。伸缩导轨水平安装于车体内部,承载升降导轨和喷涂爪完成靠近和远离树干的动作。在喷白作业中,伸缩导轨的伸出量由喷涂爪上的大传感轮C控制。
2.3 涂料箱
涂料箱由箱体、涂料搅拌器、重力传感器组成。
2.3.1 箱体
箱体安置于刷白车内部,根据车辆的载重和自重情况,得出涂料箱最大容量为400 kg,尺寸为1000 mm(L)×800 mm(W)×700 mm(H),容积为0.56 m3。箱体形状为切角长方体,加料口的倾斜角度为30°方便添加物料,优化人机关系。通过限制最大添加量的方式,防止因过满致使搅拌时产生旋涡造成溶液溢洒,为溶解留出足够的空间,如图6、图7所示。
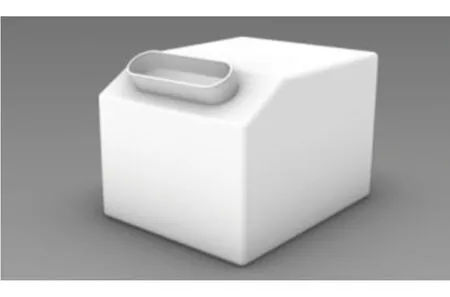
图6 涂料箱模型

图7 涂料箱模型三视图
2.3.2 涂料搅拌器
树干喷白使用的白色涂覆剂具有易沉淀的特点,需要定时搅动涂覆剂防止沉淀。因此,涂料箱中应配备涂料搅拌器,用以提升溶液的均一性和稳定性[8]。易沉淀液体的搅拌常用轴流式搅拌器,如斜叶桨式搅拌器具有结构简单、搅拌功率小、制造方便的特点。综上所述,涂料桶内搅拌桨尺寸范围0.2~0.27 m,离底高度范围0.27~0.4 m,以获得最佳的搅拌效果。
2.3.3 重力传感器
重力传感器(又称称重传感器)具有结构较简单、准确度高、适用面广的特点,被广泛应用于机械化工等领域,如料罐、料斗称重等工作。在本次设计中,重力传感器位于涂料桶下方,实时监测涂料桶内溶液质量。当传感器监测到溶液质量较低时,会发出添加涂料的提示。当溶液质量低于一定重量时,喷涂系统自动停止工作,车辆返回指定地点添加涂料。
2.4 智慧控制系统
智慧控制系统主要功能为树干识别和车辆控制。树干识别的主要内容为识别树干、扫描树地径(地径是指距地面往上0.1 m处的树干直径)。该识别方法基于计算机视觉技术中应用于苗木图像特征标志点的提取技术[9]。通过对苗木图像进行边缘增强、边缘检测、噪声滤波、背景分离等处理得到苗木的视觉特征,实现苗高、地径、根长等苗木视觉特征量的提取[10]。该方法计算速度决、易于实现、测量准确,具有普遍适用性[11-12]。树地径识别结果可操控车辆喷涂爪的张开和闭合角度。
3 自动刷白车外观设计研究
3.1 感性工学外观设计流程
感性工学(KE)是一种专注于满足消费者情感需求的产品设计方法,通过工程方法量化消费者的感性需求[13-14]。城市无人驾驶树木刷白车在外观设计时,将运用感性工学理论的研究方法分析城市环境中的自动驾驶车辆和交集人群的需求,通过科学的设计分析流程,总结出以下步骤:第一步骤是确定感性概念:定位交集人群,通过问卷和访谈的方式收集感性词汇;第二步骤是进行感性实验:通过与专家探讨的方式,提炼感性词汇,建立感性工学的词汇和图片样本库;第三步骤是通过SPSS工具分析得出关键感性词汇,再进行感性实验建立关键感性词汇和图片样本库之间的映射关系,找到符合用户心理预期的产品造型。
3.2 交集人群定位
与车辆产生接触人群为维护和保养的操作人员,以及公路上的大量行人。行人对车辆外观产生直接评判,且人数远超操作人员,加之文初提到车辆投放地点为海淀区,因此目标交集人群为海淀区的行人、司机等人员。通过资料收集和问卷调查,得出该群体对城市自动驾驶刷白车的外观需求。
3.3 建立感性词汇样本库
3.3.1 收集感性词汇
通过对城市无人驾驶树木刷白车的使用环境、交集者情况以及产品本身特征等方面的研究,使用问卷和访谈等方式向交集人群收集外观相关的感性词汇,共收集到60 个。结合与设计相关专家的专业知识和设计经验对60个词汇进行筛选,剔除与车辆外观相关性低的词汇,提炼意义相近的词汇,最终筛出20个符合要求、具有研究价值的感性词汇,分别为:安全的、坚固的、强识别性的、有警示性的、耐磨的、通用的、轻便的、环保的、智能的、灵活的、科技感的、简洁的、大气的、硬朗的、圆润的、可爱的、仿生的、有亲和力的、装饰性的、有纹理的。
3.3.2 筛选感性词汇
使用主成分分析法找出最能代表用户心理预期的感性词汇,为此需要获得交集用户的统计数据。将以上20个感性词汇制作成量表问卷,对海淀区居民进行无差别发放,共发放问卷85份,收回有效问卷81份。将统计数据代入因子分析,碎石图用以辅助决策因子个数。如图8所示,碎石图说明用户心理需求的映射度较高的因子有 2 个。

图8 碎石图(来源:SPSS分析)
主成分分析的总方差解释分析,如表1所示,前2个主成分累计可包含近70%的变化量,再结合碎石图的结果进行判断,提取出2个主因子,将作为核心设计要素主导刷白车的外观设计。在实际研究中,为了更准确地贴近用户的感性画像,取涵盖近80%变化的成分数量,即最终选取前5个因子作为主因子。接下来将通过主因子的成分得分系数矩阵找到该主因子下的主要成分,即感性词汇,得到最能代表用户心理映射的外观词汇。
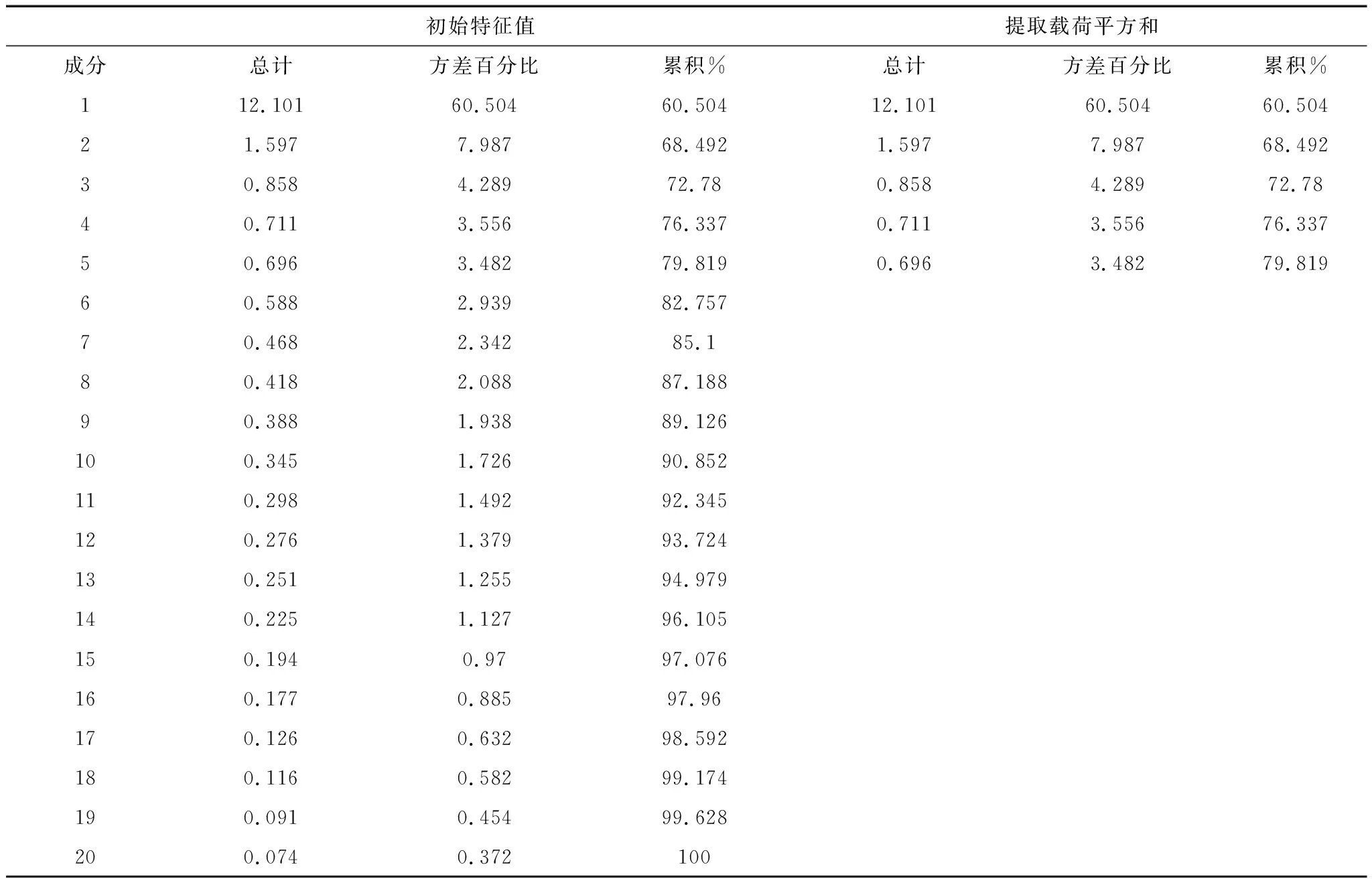
表1 总方差解释
在5 个主成分下分别对 20 个感性词汇进行打分,探究每个主成分下的代表感性词汇,得分情况如表2。

表2 成分得分系数矩阵
合并同义词后获得的感性词汇分别为:安全的、灵活的、硬朗的、装饰性的。综合以上分析数据可知用户对城市无人驾驶树木刷白车外观的最主要要求可以归纳为 4 方面:
(1)安全的:刷白车外观设计上需要可识别性和警示性,可以在车身上进行标识和标识装置的设计。同时也应该保留必要的传感器和摄像头,以保证车辆行驶的安全性和准确性;
(2)灵活的:刷白车辆应该能够适应不同的树木尺寸和形状,以及不同的刷白需求。同时,刷白车外观不宜过于复杂呆板,造型应简洁为主,突出刷白车的灵活机动感。
(3)硬朗的:刷白车作为作业车辆,在外形应该大气稳重、有力量感,需要传达出硬朗坚固的形象,可以采用现代化的设计语言和棱角分明的线条来呈现。在材质上,车身应该具有良好的防护性能和强度,以防止碰撞和损坏,应该使用坚固耐磨耐腐蚀的材料。
(4)装饰性的:作为一款用于城市维护的车辆,刷白车的工作环境为市区主干道,因此产品外观需要富有装饰性、美观的造型,以提高品牌形象和用户体验。
3.4 建立产品图片样本库
为了将用户心中的感性词汇具象化,促使设计要求转化为具体的产品造型特征应用于刷白车的外观设计,需要建立产品图片样本库应用于感性试验,探究感性词汇和产品造型特征之间的关系。产品图片样本的筛选原则基于组成产品整体外观的多样化局部造型特征。为保证感性试验的准确性,图片库应尽可能全面的涵盖所有最基本的汽车产品造型元素。汽车造型形象包括大面积的基本形体和在形体的基础上构造线、面、色彩和装饰件[15],因此汽车产品的造型元素包括:
(1)基本形体:长方体、正方体、椎体、棱柱、棱台、圆台、多面体、仿生形态;
(2)线造型方法:直线、自由曲线、圆形、椭圆、三角形、平行四边形、矩形、菱形、多边形;
(3)面造型方法:圆角、斜角、渐消、切割、穿插、叠加、包裹、弯曲、生长、凹凸、镂空;
(4)装饰件:装饰件种类繁多,常见的有门槛条、车门防撞条、日行灯等。
最终筛选出 10 个最具代表性的产品图片作为感性实验的样本,筛选如图9所示。

图9 感性样本图初筛
3.5 感性试验
在产品外观这个复杂问题中,感性试验通过设法将人的各种感性定量化,将感性分析的结果转化为产品物理设计要素,依据用户喜好来制造产品。在本次感性试验中,将筛选后的样本图片用感性词汇的正反意义赋值,获得用户视角下每个感性词汇对应的产品造型元素,并应用于刷白车的外观设计。因此需要对先前筛选后的感性词汇进行处理,分别找到与4个感性词汇意义相反的形容词,组成 4组感性词汇对,分别是:安全的-危险的、灵活的-笨重的、硬朗的-柔弱的、装饰点缀的-单调乏味的。
下一步,将筛选后的10个样本图片用4组感性词汇对赋值,制作产品造型感性意向评价量表,获得用户心理感受的定量化结果。以问卷的形式向用户分发,得到有效问卷样本 50 份。获得用户对每个样本的 4 个感性维度打分后,通过统计计算均值,统计结果如表3。

表3 感性问卷统计结果
下一步,需归纳出每一个感性词汇下高评分的多个样本图片的共性,分析得出相似的产品造型元素特征,该特征是用户心目中感性词汇在产品造型特征上的具象化表达。为了更清晰地观察造型特征和感性词汇之间的关联性,将表3的感性问卷统计结果绘制成柱状图10。
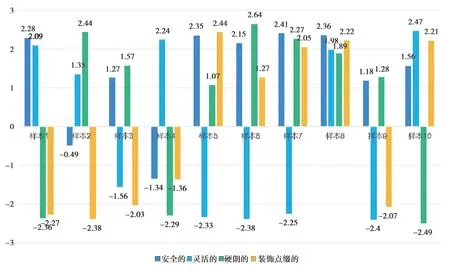
图10 所有样本下平均分柱状图
设计矩阵分析法(DFA,design format analysis)较适合解决产品典型特征的归纳分析问题,通过设计矩阵分析法构造矩阵,将样本造型特征作为横轴,不同样本作为纵轴,得出不同样本之间造型特征的区别和联系。在绘制矩阵时,当样本与造型特征相关性强时将方块标记为黑色,最终通过每列标记的数量的多少可归纳出不同样本之间的造型要素共性和异性。下一步通过柱状图10找出同一感性语义下的高得分样本,代入设计矩阵图中量化其造型要素,得出共性的造型要素,如图11。

图11 所有样本设计矩阵分析图
根据设计矩阵表总结感性词汇“安全感”的造型要素为:将形体进行上下分段,并为产品增加横向张力,使用曲线造型消除直线和方体的棱角感增加亲和力;“灵活感”的造型要素为:形体圆润感较强,即使是方体造型也需要较大的圆角和渐消面;“硬朗感”的造型要素为:方形形体、直线造型的棱角感给人坚固硬朗的感受;“装饰性”的造型要素为:上下分段形体有利于丰富产品造型;使用切割的造型方式;圆润的形体适合使用曲线造型装饰。
综上所述,通过感性工学的设计流程,建构感性词汇和图片样本库,结合统计分析和计算机技术的运作,总结出符合用户感受意向的产品造型要素,即产品形体应设计为上下分段的横向形体,并采取方形形体和圆润形体结合的方式设计造型;使用较大的圆角和渐消面消除方体形体的棱角感,应用曲线造型增加亲和力,不适合使用过多折线;使用切割的面造型手法增强装饰性。
3.6 国家安全规定
城市公路上使用的树木刷白车在公路上养护作业时,需满足我国对于养护车辆的公路养护安全作业规程(JTG H30-2015)。根据该规定,本文探讨的树木刷白车类属于移动养护作业中的机械移动养护作业,需要设置标志警告驾驶人员调整行车状态,警告设施形式为:车辆顶部安装车辆闪光灯(360°旋转黄闪灯,A-3-12),后部安装闪光箭头灯牌(长×宽=1 200 mm×400 mm,蓝黑底,黄色或橘黄色箭头,A-3-10),如图12所示。

图12 车辆顶部闪光灯(A-3-12)和闪光箭头灯牌(A-3-10)
3.7 自动刷白车外观设计实践
根据前文感性工学探究造型要素对用户心理的影响,确定了刷白车造型感性需求包括:安全感、灵活性、硬朗感和装饰性,并提出了产品造型方面的设计要素,以此为指导构建城市无人树木刷白车的外观模型,使用计算机辅助建模的方式对刷白车产品进行建模渲染,效果如图13。

图13 城市无人树木刷白车效果图
城市无人树木自动刷白车整体体积较小,造型设计分为上下两部分,底盘造型由长方体切割而来,辅以较小的圆角,给人硬朗、结实的感受。上层的车身造型取自圆角矩形,较大的圆角和渐消面可柔和过度掉方体形体的棱角感,增加亲和力。分段式设计不仅为外观层面增添灵活性和稳定性,还有助于维修和更换零件。流线型车头有助于减小风阻,降低能耗,同时与车尾部造型做出了区分,方便用户观察车的动向。车身采用哑光金属材料增加耐用度、增强质感,前窗采用钢化玻璃材质,便于自动驾驶的摄像头查看路况。刷白车整体造型简洁并富有流动感,与使用环境统一和谐。
4 结束语
本论文通过对道路树木自动刷白机产品的研究,创新设计喷白机械手的形状与自适应性,增强喷涂机的树干适应性,增强设备的亲切感,最终建立了一套结合感性工学设计外观的平整道路树木刷白车改良设计流程,得出了符合用户感性预期的树木刷白车设计结果。综上所述,无人驾驶的树木刷白车的设计满足了无人看管时的树木刷白需求,为后续树木刷白领域的研究提供了参考。
猜你喜欢
奇妙博物馆(2022年9期)2022-09-28
军事文摘(2021年16期)2021-11-05
山东纺织经济(2021年5期)2021-08-13
建材发展导向(2019年5期)2019-09-09
中国公路(2017年15期)2017-10-16
小猕猴学习画刊(2017年1期)2017-02-17
小猕猴学习画刊(2017年1期)2017-02-17
新闻传播(2016年9期)2016-09-26
风能(2016年12期)2016-02-25
当代教育论坛(2015年4期)2015-11-08