
纯电动汽车能量回收的复合制动控制策略研究
2023-12-03 16:12:06王笠力李政林刘胜永王月武
广西科技大学学报 2023年4期
王笠力 李政林 刘胜永 王月武


摘 要:为了提高电动汽车再生制动能量回收率,缓解电动汽车给人们带来的里程焦虑问题,以某款纯电动汽车为研究对象,在分析电动汽车制动时出现的情况和符合法规要求的基础上,设计了一种基于I曲线、ECE法规的切线以及f线的复合制动力分配策略,确保汽车在制动过程中的安全性和稳定性。首先搭建以制动强度、车速、电池荷电状态(state of charge,SOC)为输入,以再生制动分配比例为输出的Mamdani型模糊控制模型;同时考虑电机性能和电池充电对再生制动能量回收的制约,提出了电动汽车再生制动控制优化策略;最后将Simulink中建立的再生制动控制策略与AVL Cruise整车仿真模型进行联合仿真。仿真结果表明:相比车速查表法控制策略,所设计的模糊控制策略在CLTC-P工况下,电池SOC贡献度提高22.08%,制动能量回收率提高3.11%。
关键词:纯电动汽车;能量回收;复合分配策略;再生制动;模糊控制
中图分类号:U471.23;U469.72 DOI:10.16375/j.cnki.cn45-1395/t.2023.04.011
0 引言
在节能减排政策和汽车市场的双重驱动下,我国电动汽车保有量快速增加[1]。纯电动汽车因其使用成本低、结构简单以及污染低等优势,近年来已成为越来越多人购车的首选。目前,纯电动汽车主要存在充电困难、动力电池和驱动电机技术不成熟等问题,造成纯电动汽车续航里程缩短[2-4]。在纯电动汽车研发过程中,研究再生制动控制技术可降低整车能耗,回收制动损失的能量,增加汽车续航里程。
近年来,很多学者对再生制动控制技术进行大量研究并取得了显著成果。文献[5]通过建立模糊制动意图识别模型,提出制动边界最大化控制策略,虽能最大化降低制动能量的损耗,但忽略了制动稳定性。文献[6]考虑制动强度、电池荷电状态(state of charge,SOC)、制动意图识别等因素,引入双模糊控制策略,制定前、后轮再生制动分配策略,但没有考虑制动效能在制动过程中的影响。文献[7]采用串联式控制方式,优先考虑电机制动,充分利用电机再生制动特性,但忽略了电池充电功率限制,易缩短电池使用寿命并给汽车行驶带来安全隐患。文献[8]考虑更多的回收制动能量,通过优化电机再生力矩,实现有效发电功率最大化,但忽略了制动舒适性。
针对上述问题,本文以某款纯电动汽车为研究对象,在已有研究基础上提出一种最大化复合制动力分配策略,引入基于制动强度、车速、电池SOC的模糊控制算法,同时充分考虑电机性能和电池充电限制,对电机再生制动进行优化控制,将Simulink与Cruise整车模型联合仿真,并在CLTC-P循环工况及不同制动工况下对该策略进行验证。
1 复合再生制动力的分配策略
1.1 前、后轴制动力分配原则
为了保障驾驶员在制动时的安全性和稳定性,需要对电动汽车前、后轴制动力分配范围进行分析[9]。当汽车在水平路面进行制动时,会发生以下3种情况:
1)在汽车前、后轮同时抱死的情况下,前、后制动器制动力按照理想制动力曲线分配,即I曲线,其表达式为
[Fr=12Ghgb2+4hgLGFf-Gbhg+2Ff] , (1)
式中:[Ff]、[Fr]为前、后轮制动力;[G]为汽车质量;[hg]为质心高度;[b]为质心与后轴中心线距离;[L]表示前、后轴距离。
2)当后轮先抱死时,汽车极易出现侧滑现象,此时前、后轮地面制动力关系式为
[Fxr=-φhgL+φhgFxf+φGaL+φhg], (2)
式中:Fxf、Fxr为前、后轮地面制动力;[φ]为附着系数;[a]为质心与前轴的中心线距离。
3)当前轮先抱死时,汽车极易失去转向能力,此时前、后轮地面制动力关系式为
[Fxr=L-φhgφhgFxf-Gbhg]. (3)
在满足驾驶员制动需求的前提下,前、后轴制动力分配还应考虑汽车的安全性。ECE制动法规对此提出了明确要求[10],当路面附着系数为0.2~0.8时,制动强度(Z)为
[Z≥0.1+0.85(φ-0.2)]. (4)
根据前、后轴制动力关系可求出ECE法规边线,即M曲线,其表达式为
[Ff=G(Z+0.07)(b+Zhg)0.85L,Fr=GZ-Ff.] (5)
1.2 复合制动力分配策略
为了解决制动边界策略过于贴近ECE法规边界线从而影响前、后轴制动力分配稳定性的问题,过A点作法规曲线的切线。图1由OABC围成的闭合区域为汽车安全制动分配范围,该安全范围不但能满足不同制动强度下的制动安全,而且可以最大限度地提高前轴制动力的分配占比,从而改善制动能量回收效果。
图1中,A点的制动强度为0.1,B点为M曲线的切线方程与f线的交点。根据上述公式可求得B点的制动强度为0.539,C点的制动强度为0.700。根据不同制动力的需求,设计汽车前、后轴制动力按曲线OA—AB—BC—CD分配,其分配方式为以下4个阶段:
1)当0≤Z≤0.100时,前、后轴制动力沿OA线分配。此阶段所需制动力较小,制动强度也很小,前轴的需求制动力全部由电机提供。
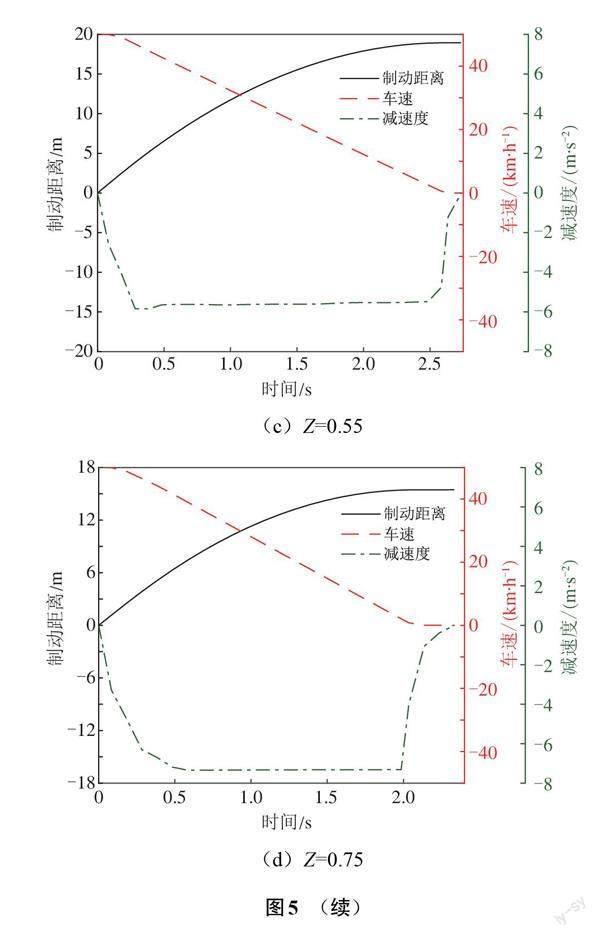
2)当0.100 3)当0.539 4)当Z >0.700时,利用路面附着条件,前、后轴制动力沿CD线分配。此阶段制动强度很大,为紧急制动情况,此时电机退出制动任务,只有机械制动参与,保证制动安全。 1.3 再生制动转矩优化 动力电池和电机作为再生制动控制系统的核心部件,影响着制动能量回收的效率[11]。为避免电池过充,影响电池寿命,应对电机再生制动进行优化控制。电机再生制动转矩受电池最大充电功率约束为 [Tbat_max=9 550(PI_max, PU_max)n], (6) 式中:[PI_max]为恒流最大充电功率,[PU_max]为恒压最大充电功率,[n]为电机的转速。同时,电机作为能量转换部件,其电机性能也会影响电机提供再生制动转矩的大小。电机在不同转速下的最大转矩为 [Tm_max=Te, n≤ne,9 550Pen,n>ne,] (7) 式中:[Te]为电机峰值转矩,[Pe]为电机的峰值功率,ne为额定转速。考虑实际工况还存在其他因素的影响,为实现这些要求,引入电池修正因子K1和车速修正因子K2,说明车速以及储能系统对电机制动转矩的影响[12]。 [K1=0,-20Sc+19,1,0.95 [K2=0,0.2v-1,1,0≤v<5,5≤v≤10,v>10.] (9) 式中:[Sc]代表SOC的值,v表示车速。 因此,经修正后的电机制动转矩为 [Tm_act=min(Tbat_max,Tm_max)?K1?K2]. (10) 2 再生制动的模糊控制设计 2.1 模糊控制隶属度函数设计 车速查表法控制策略是按照固定比值分配再生制动比例。考虑到影响汽车再生制动的因素众多,且呈現不确定性及非线性,本文引入模糊控制算法[13]。选择其中3个主要因素:制动强度、电池SOC、车速。如图2所示,依据所选取识别参数,选用三输入单输出mamdani模糊推理模型。 1)制动强度 制动强度能很好地反映驾驶员的制动意图,根据不同的制动需求,将Z划分为3个子集{S(小),M(中),B(大)},论域为[0,1]。 2)电池SOC 动力电池作为电动汽车的动力储能装置,其SOC的高低是决定制动能量回收效率的一个重要因素。为防止对电池本身造成冲击,当SOC值高于90%时尽量不要对其充电。因此,将SOC划分为5个子集{VL(很低),L(低),M(中),H(高),VH(很高)},论域为[0,1]。 3)车速 车速的高低与再生制动能量回收紧密相关。当车速低时,回收的能量较少,随着车速不断增高,制动能量回收率也增高,故将车速划分为3个子集{L(低),M(中),H(高)},论域为[0,120]。 4)再生制动分配比例(K) 在汽车制动过程中,电机制动力参与的程度即为再生制动所占驱动需求制动力的比例。K值的大小说明了电机输出能量的多少,故将K划分为5个子集{VS(很小),S(小),M(中),B(大),VB(很大)},论域为[0,1]。 [ 图2 (网络版彩图)输入输出隶属度函数图 2.2 模糊规则设计 纯电动汽车再生控制策略工作过程描述如下: 1)当制动强度较小时,驾驶员制动需求不高,应尽量回收更多能量,使电机制动比例达到最大;随着制动强度增大,电机制动所占比例应逐渐减小;当制动强度很大时,汽车处于紧急制动状态,为确保驾驶员行驶安全,电机退出制动过程。 2)当电池SOC值过高时,为保护电池不会因过充而影响电池寿命,汽车制动时不再回收能量,电机退出制动任务。 3)当车速过低时,电机的转速过低,产生的制动转矩过小,汽车制动时回收的能量较少,此时应减小电机制动所占比例。 经过对再生控制策略工作过程的分析和多次仿真,建立45条模糊规则。本文采用模糊条件句子为:[if(Z is A) and (V is B) and (SOC is C) then (K is D)],其模糊控制规则如表1—表3所示。 表1 制动强度为S的模糊控制规则表 [SOC 车速 L M H VL VB VB VB L M B VB M M B VB H S M B VH VS VS VS ] 表2 制动强度为M的模糊控制规则表 [SOC 车速 L M H VL S B VB L S B VB M S M B H S M M VH VS VS VS ] 表3 制动强度为B的模糊控制规则表 [SOC 车速 L M H VL VS VS VS L VS VS VS M VS VS VS H VS VS VS VH VS VS VS ] 3 仿真与结果分析 3.1 仿真模型搭建 以某款纯电动汽车为研究对象,首先在Simulink中搭建再生制动控制策略并编译为Interface文件,嵌入如图3所示的AVL Cruise整车模型中,其整车主要参数如表4所示。 表4 某纯电动汽车整车参数 [整车参数 数值 整车参数 数值 整备质量/kg 1 658 轮胎滚动半径/m 0.32 满载质量/kg 2 033 质心与前轴之间距离/m 1.26 迎风面积/m2 2.28 质心高度/m 0.5 风阻系数 0.31 滚动阻力系数 0.008 1 轴距/m 2.7 主减速比 8.4 ] 3.2 循环工况制动能量回收结果分析 采用CLTC-P循环工况进行仿真,该循环工况的制动较为频繁,且符合实际的行车路况。以制动能量回收率作为评价指标,将电池SOC初始值设为80%,将所设计的模糊控制策略和传统的车速查表控制策略分别嵌入整车仿真模型中,完成仿真计算[14]。图4为CLTC-P工况下再生制动能量回收效果图。从图4(a)知,实际车速在CLTC-P工况下幾乎与需求车速曲线吻合,车速跟随性能较好,仿真模型精度能满足要求。在图4(b)中,与无再生制动分配策略相比,本文模糊控制策略SOC贡献度为17.58%,而查表法控制策略SOC贡献度为14.40%,SOC贡献度提高22.08%,电池SOC消耗量缓慢衰减,曲线有明显的回升趋势。图4(c)中,电流随工况改变而不断变化,电流为负值表示电池处于放电状态,正值表示电池处于充电状态。本文的模糊控制策略在每个制动点产生的再生电流峰值高于查表法控制策略,在工况的中高速阶段再生电流产生效果更佳。 表5为2种控制策略在CLTC-P工况下的仿真结果。由表5可知,相比车速查表法控制策略,本文模糊控制策略下的电池回收能量更多,有效制动能量回收率提高了3.11%。 表5 2种控制策略仿真结果 [控制策略 整车消耗 能量/kJ 电池回收的 能量/kJ 有效制动能量 回收率/% 模糊控制策略 9 554.41 1 610.76 16.86 车速查表法 控制策略 9 565.22 1 315.01 13.75 ] 3.3 不同制动工况结果分析 为进一步验证汽车制动性能,以制动距离作为评价指标[14]。根据乘用车制动系统试验要求,选取初速度为50 km/h,制动强度为0.10、0.30、0.55、0.75的4种制动工况进行仿真。图5为4种制动工况下的车速、制动距离和制动减速度变化图,表6为4种制动工况在初速度为50 km/h情况下的制动性能。 (a)Z=0.10 (b)Z=0.30 图5 (网络版彩图)4种制动工况下车速、 制动距离和制动减速度变化图 (c)Z=0.55 (d)Z=0.75 图5 (续) 表6 初始车速为50 km/h的制动性能 [制动工况 制动时间/s 制动距离/m 模糊控制回收能量/kJ Z=0.10 12.28 83.44 83.49 Z=0.30 4.68 31.79 73.24 Z=0.55 2.73 18.94 58.44 Z=0.75 2.43 15.47 0 ] 由图5和表6可知,在小制动工况下,优先采用电机制动,回收更多的能量;逐渐增大制动强度,制动距离和时间都相应缩短,制动减速度逐渐增大,机电复合制动共同参与,且电机制动所占比例逐渐减小,回收的能量也减小。此外,根据国标要求,制动强度大于0.70时,汽车处于紧急制动,其制动距离小于19.00 m[15]。因此,本文模糊控制策略模型在制动安全性方面符合汽车制动安全性要求。 4 结论 针对某款纯电动汽车续航里程较短的问题,以提高纯电动汽车的再生制动能量回收效率为目标,分析了前、后轴制动力分配原则,明确了汽车安全制动分配范围,提出一种改进的复合制动力分配方案,并引入以制动强度、SOC、车速为输入,再生制动比例系数为输出的模糊控制算法。通过Interface方式将Cruise和Simulink建立整车控制策略模型进行仿真验证,仿真结果表明:相比车速查表法再生制动控制策略,基于模糊控制再生制动策略的制动能量回收率提高了3.11%,电池SOC贡献度提高22.08%,延长了电动汽车的续航里程,且该策略满足车辆制动安全性的要求。 参考文献 [1] LI J Z.Charging Chinese future:the roadmap of China's policy for new energy automotive industry[J].International Journal of Hydrogen Energy,2020,45(20):11409-11423. [2] 王琦,刘胜永,郑致飞.基于模糊控制的纯电动汽车能量管理策略研究[J].广西科技大学学报,2021,32(2):83-88,106. [3] LI Z H,KHAJEPOUR A,SONG J C.A comprehensive review of the key technologies for pure electric vehicles[J].Energy,2019,182:824-839. [4] LIN T L,LIN Y Z,REN H L,et al.Development and key technologies of pure electric construction machinery[J].Renewable and Sustainable Energy Reviews,2020,132:110080. [5] 吴志新,石金蓬,李亚伦,等.基于制动边界与意图识别的再生制动策略[J].北京航空航天大学学报,2017,43(8):1531-1540. [6] 卢秀和,邹恺睿.基于模糊控制的纯电动汽车再生制动策略[J].科学技术与工程,2019,19(23):271-275. [7] 胡卫,秦永法,曾励,等.前驱式纯电动汽车制动能量回收控制策略研究[J].中国农机化学报,2019,40(8):116-121. [8] 王茹洁,武志斐,邹纯.纯电动物流车最优制动能量回收控制策略研究[J].机械设计与制造,2020(4):301-304. [9] 余志生.汽车理论[M].北京:机械工业出版社,2009. [10] 国家发展和改革委员会,全国汽车标准化技术委员会.乘用车制动系统技术要求及试验方法:GB 21670—2008[S].北京:中国标准出版社,2008. [11] JIANG B,ZHANG X W,WANG Y X,et al.Regene-rative braking control strategy of electric vehicles based on braking stability requirements[J].International Journal of Automotive Technology,2021,22(2):465-473. [12] HE Q,YANG Y,LUO C,et al.Energy recovery stra-tegy optimization of dual-motor drive electric vehicle based on braking safety and efficient recovery[J].Energy,2022,248:1. [13] GENG C,NING D W,GUO L F,et al.Simulation research on regenerative braking control strategy of hybrid electric vehicle[J]. Energies,2021,14(8):2202. [14] 初亮,刘达亮,刘宏伟,等.纯电动汽车制动能量回收评价方法研究[J].汽车工程,2017,39(4):471-479. [15] 中华人民共和国公安部.机动车运行安全技术条件:GB 7258—2017[S].北京:中国标准出版社,2017. Research on compound braking control strategy for energy recovery of pure electric vehicle WANG Lili1, LI Zhenglin* 1, LIU Shengyong1, 2, WANG Yuewu1 (1. School of Automation, Guangxi University of Science and Technology, Liuzhou 545616, China; 2. Guangxi Key Laboratory of Automobile Components and Vehicle Technology (Guangxi University of Science and Technology), Liuzhou 545616, China) Abstract: To improve the energy recovery rate of regenerative braking of electric vehicles and relieve anxiety due to the electric vehicle range problem, this paper takes a pure electric vehicle as the research object and analyzes the situation and regulatory requirements that occur during the braking of electric vehicles. Then we design a compound braking force distribution strategy based on I curve, ECE regulations tangent and f line to ensure the safety and stability of the vehicle during the braking process. Firstly, a mamdani-type fuzzy control model is built with braking intensity, vehicle speed and battery state of charge (SOC) as input and regenerative braking distribution ratio as output; meanwhile, the regenerative braking control optimization strategy for electric vehicles is proposed considering the constraints of motor performance and battery charging on regenerative braking energy recovery. Finally, the regenerative braking control strategy built in Simulink is co-simulated with the whole vehicle simulation model built by AVL Cruise. The simulation results show that compared with the control strategy of the speed look-up table method, the designed fuzzy control strategy can increase the battery SOC contribution by 22.08% and the braking energy recovery rate by 3.11% under the CLTC-P condition. Key words: pure electric vehicle; energy recovery; compound distribution strategy; regenerative braking; fuzzy control (責任编辑:黎 娅) 收稿日期:2022-09-20 基金项目:广西自然科学基金重点项目(2020GXNSFDA238011);广西汽车零部件与整车技术重点实验室自主研究课题(2020GKLACVTZZ04);广西自动检测技术与仪器重点实验室基金(YQ22203)资助 第一作者:王笠力,在读硕士研究生 *通信作者:李政林,博士,教授,研究方向:新能源汽车能量管理、智能仪器、图像处理,E-mail:59545980@qq.com
猜你喜欢
大陆桥视野·下(2016年11期)2017-02-28 22:43:28青春岁月(2016年22期)2016-12-23 15:56:15西南交通大学学报(2016年3期)2016-06-15 20:29:35电子制作(2016年21期)2016-05-17 03:53:01通信电源技术(2016年5期)2016-03-22 01:09:57科技视界(2016年4期)2016-02-22 20:52:35现代经济信息(2016年1期)2016-01-25 14:04:44西北工业大学学报(2015年1期)2016-01-19 03:29:52池州学院学报(2015年3期)2016-01-05 01:13:18科技资讯(2015年17期)2015-10-09 21:13:32
