水下管汇安装虚拟仿真训练系统设计与实现
2023-12-01 03:44:26张建兵陈从磊连远锋严泽枭
软件导刊 2023年11期
张建兵,陈从磊,连远锋,严泽枭
(1.中国石油大学(北京)信息科学与工程学院;2.中国石油大学(北京)石油数据挖掘北京市重点实验室,北京 102249;3.中国石油化工股份有限公司石油勘探开发研究院,北京 100083)
0 引言
随着我国油气资源的开发逐步走向深水油气田,水下生产系统得到了广泛应用,已成为海洋油气开发与生产的关键装备。水下管汇是一种基于重力的大型水下设备,是水下油、气生产的汇集与分配中心[1-2]。作为水下生产系统中重要的组成部分,其造价高、体积大,内部管线高度密集。在安装作业过程中,安装母船以及整个管汇作业系统会受到海上风、浪与水流的联合作用,安装难度与风险均较大,如果出现差错,损失将无比惨重[3-5],因此对油田作业员工进行深海水下作业项目的培训十分必要。
为提高油田作业员工对深海水下作业项目的操作水平,文献[6]根据中国陵水、流花气田水下管汇的实际设计情况,提出管汇质量计算的理论方法,实现了利用各部件三维模型快速搭建水下管汇、估算水下管汇质量的目标;文献[7]结合水下管汇主要设备构件的组成与布置对国产化水下管汇设计方案进行了优化;文献[8]开发了一个基于Unity 3D 平台的水下管汇模块化设计仿真系统,完成了水下管汇设计模块的拆分,为水下管汇国产化、智能化设计提供了技术支持;文献[9]基于三维建模、3D 渲染、工程船舶系统的数学建模等基础工作实现了大型工程船舶虚拟仿真训练系统的开发;文献[10]研发了水电站运维仿真培训系统,实现了水电站三维场景漫游、机组各部件模拟拆装、典型操作模拟、误操作仿真培训等功能;文献[11]基于三维虚拟仿真技术与网络通讯技术开发了井下虚拟仿真培训系统;文献[12]基于Unity3D 平台实现了海上钻修井平台钻柱自动化处理虚拟仿真系统;文献[13]利用物理操作系统、虚拟船、工具机、水下生产系统与海洋环境构建了一个基于虚拟现实的深水水下应急维修仿真系统。然而以上虚拟仿真训练系统构建技术并不适用于深海工程仿真模拟系统的构建,原因是:①缺少模拟复杂海洋环境中海水动态变化的水力模型;②缺少吊装过程中较为关键的绳索模型仿真;③仿真系统在模拟水下重要设备的细节和行为方面仍有欠缺,需要进一步提高系统的物理精度和真实感。
针对上述问题,本文将实时动力学物理仿真引擎Vortex[14-15]与视景仿真Vega Prime[16-17]平台进行有机结合,对深水海洋环境和吊装绳索进行实时动力学仿真,对水下管汇安装过程进行仿真操作模拟,构建了一个符合深水水下安装培训需求的虚拟仿真软件系统。通过对作业环境、管汇、绳索、吊钩、导向桩、无人遥控潜水器(Remotely Operated Vehicle,ROV)进行物理属性与几何属性建模,该系统可对管汇吊起、管汇下放、ROV 抓取管汇、ROV 推动管汇对中4 个操作项目进行模拟。此外,本研究通过分步评分与专家规则评分相结合的方式实现了仿真操作自动评分,经过实践检验,评价结果较为合理。该系统可有效对操作人员进行训练,减少实际安装过程中的失误,对保证吊装过程稳定性起到积极作用。
1 系统设计
整个系统基于虚拟现实技术构建,硬件部分包含多台仿真服务器以及3 个操控台,分别为ROV 操控台、吊机操控台以及绞车操控台。海洋环境、安装船舶、管汇、ROV 机器人均采用虚拟仿真技术构建。系统采用操控层、作业服务层和数据层3 层架构,其中作业服务层是整个系统的核心,包括海洋环境仿真组件、操控台通讯组件、对各个模型进行操控的组件以及碰撞检测服务组件;操控层包括ROV、手机、平板等各终端操作平台;数据层用于记录仿真操作过程数据并进行操作评分。整个系统结构如图1所示。
2 关键技术
2.1 实时动力学仿真环境构建
实时动力学仿真环境是一种将几何模型与物理仿真模型相结合构建的仿真环境,具有仿真解算真实性和实时性的特点[18-20]。该仿真环境采用的物理仿真引擎Vortex具有专业的多体动力学解算能力,能较为精确地对流体场内的刚体模型进行动力学解算。视景仿真部分采用Vega Prime 平台作为支撑,该平台底层图形库为OpenGL,其提供了Lynx Prime 图形用户界面工具,通过ACF(Application Configuration File)文件对视景仿真环境进行配置。Vega Prime 还提供了面向海洋仿真的Marine 模块,可以绘制逼真的海面风浪效果。
水下管汇安装虚拟仿真训练系统的实时动力学仿真环境结构如图2所示。
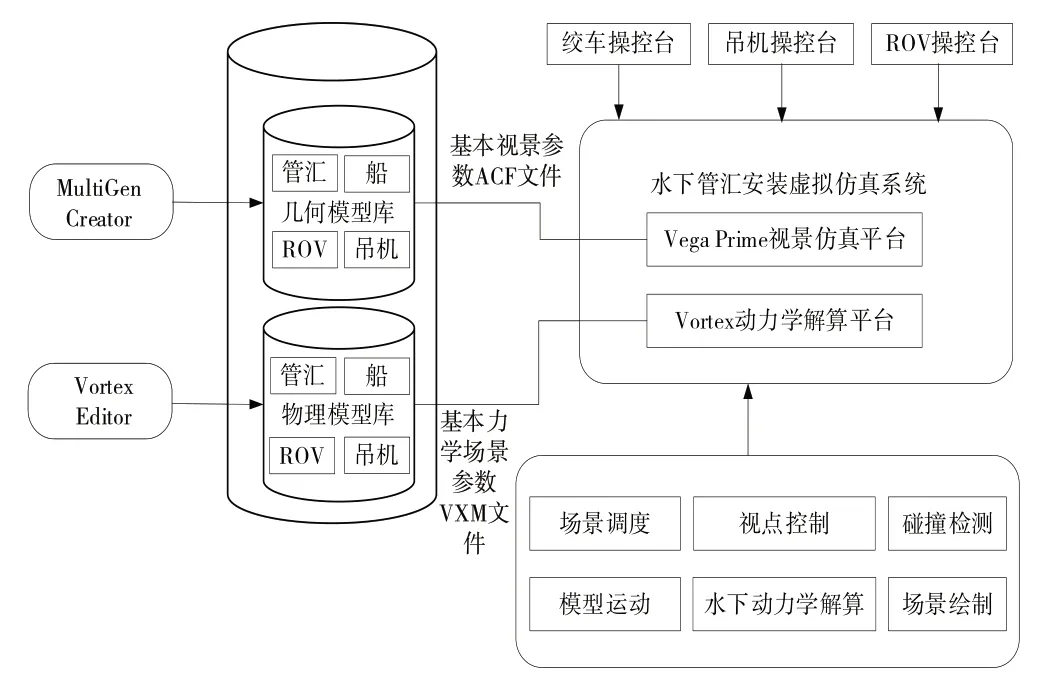
Fig.2 Real time dynamic simulation environment structure图2 实时动力学仿真环境结构
通过MultiGen Creator[17]完成系统中管汇、船、ROV、吊机等模型的几何模型构建;通过Vortex Editor 完成管汇、船、ROV、吊机等模型的物理模型构建。Vega Prime 与Vortex 均通过配置文件对模型进行初始化,其中场景绘制模块负责场景生成与模型加载显示;场景调度模块负责场景切换;视点控制模块负责从多个方位与角度显示场景;模型运动模块负责模型的移动,包括前进、后退、左移、右移、左旋、右旋等;水下动力学解算模块负责水下物体的受力分析,改变物体的状态;碰撞检测模块负责物体之间的碰撞分析,根据物体质量、运动速度、表面属性、相关约束等状态进行实时动力学解算得到其仿真运动状态。
2.2 绳索模型的动力学仿真
滑轮绳索被广泛应用于工程机械、航空航天等领域,作为典型的刚柔耦合多体系统,其动力学建模与仿真存在以下难点[21]:①绳索在各个滑轮之间流动;②绳索的抗弯模量很小,主要通过轴向变形和增加动能来承受横向载荷;③滑轮与绳索的接触段是动态变化的。吊机需要绳索与滑轮配合实现起吊。本文中柔性绳索的模拟采用Vortex开发库中的Cable 模块,其实现原理为在空间内建立若干个刚性绳索段,然后采用具有一定自由度的约束机制将各绳索段首尾连接形成具有一定柔性的绳索类对象(VxCable)。采用集中质量法对缆绳进行模拟,将连续的缆绳用N+1个点平均分为N 段,将其离散成N 个线性单元。
采用插件的方式模拟绳索,定义了CableDisplayNode_VP 类,具体代码为:
绳索显示采用圆柱体型、线型和多面体型3 种形态,其动力学仿真效果如图3所示。

Fig.3 Dynamic simulation of rope图3 绳索动力学仿真
图4、图5、图6(彩图扫OSID 码可见,下同)分别为采用上述方式构建绳索仿真模型后,系统启动吊装、吊起管汇以及运移管汇等时绳索的状态。可以看出,绳索的仿真状态与实际相符,效果逼真,验证了本文绳索仿真方法的有效性。

Fig.5 Rope status when lifting the manifold图5 吊起管汇时绳索状态

Fig.6 Rope status during migration of the manifold图6 运移管汇时绳索状态
2.3 系统视景仿真
系统视景仿真包括三维海洋场景仿真、水下系统设备、场景切换以及场景漫游设计等。三维海洋场景仿真包括对海面波浪的模拟、海平面以上大气环境视景以及海底地形的场景呈现。通过二次开发Vega Prime 大气光照模型,对环境光和漫反射进行调节可渲染出海洋水体的光学效果。结合Vega Prime Marine 模块可实现生动真实的海面波浪效果,还可使海面波浪随工况条件的变化而发生变化。海平面场景模拟如图7 所示,海底场景模拟如图8所示。

Fig.7 Sea level scene simulation图7 海平面场景模拟
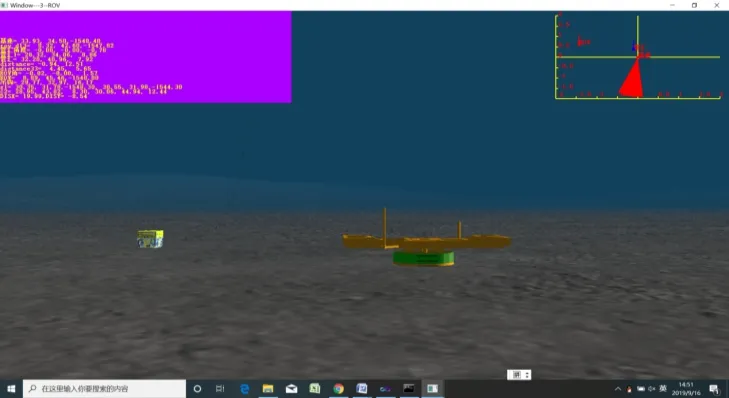
Fig.8 Underwater scene simulation图8 海底场景模拟
2.4 管汇吊起运动仿真
管汇吊起具体过程为操控吊机下放吊钩,勾起管汇上的绳索,然后拉起管汇。整个过程涉及吊臂、绳索、吊钩和管汇4 个模型,采用刚体模型的动力学仿真。采用VxPart类作为刚体的基本动力学模块,该对象关联了对应于刚体动力学模型的VxCollisionGeometry 类对象和对应于刚体几何外形的VxNode 类对象。系统每一部分的物理模型根据物体特性得到相应的运动规律,同时空间中的刚体还可根据物理模型的几何外形创建碰撞检测几何体外形,作为该物体在空间中受到碰撞时的检测形态。在管汇吊起过程中,当吊钩与管汇绳索接触时将触发吊起动作。基于几何模型与物理仿真模型的结合,本文实现了真实感强的水下管汇安装过程仿真,管汇吊装与入水的实现效果如图9 所示。物体在碰撞时会根据其质量、运动、速度、表面属性、相关约束等状态进行实时动力学解算得到其仿真运动状态。整个运动状态时空数据会被发送到后台数据存储平台中,作为后续评价打分的依据。

Fig.9 Implementation effect of manifold lifting and water inlet图9 管汇吊装与入水的实现效果
2.5 仿真训练评分
仿真考评是评价操作员培训效果以及确定操作员是否胜任实际工作的重要手段[22-24]。采取科学合理的评估方法正确反馈训练真实情况有助于快速提升操作人员的技能水平。水下管汇安装虚拟仿真训练系统采取分步评分为主、专家规则评分为辅的方式打分。其将训练系统分解为若干科目,然后将科目分解为若干基础步骤,形成树状的基础步骤集合。具体如图10所示。

Fig.10 Tree diagram of subjects and basic steps图10 科目与基础步骤树状图
每个科目和基础步骤均可设置相应的权重,例如科目1“吊起管汇”的5个基础步骤权重设置界面如图11所示。
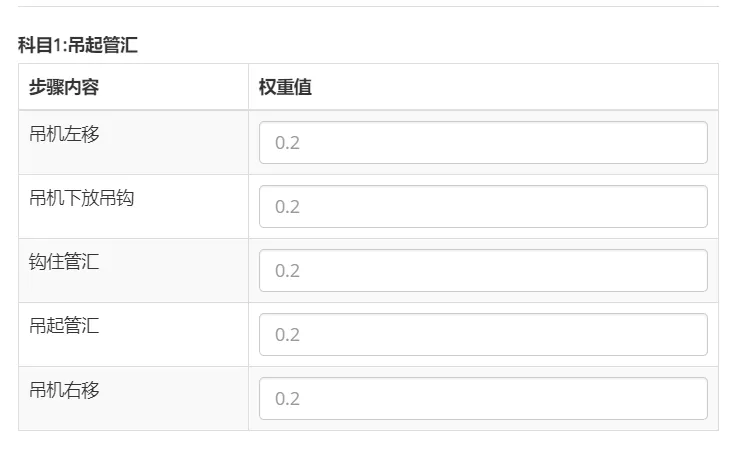
Fig.11 Weight setting interface of the basic steps of subject 1图11 科目1基础步骤权重设置界面
每个基础步骤还需结合专家评分规则库进行评分。专家知识规则库示例见图12。目前针对水下管汇安装虚拟仿真训练系统可供参考的规则和经验较少,因此将知识规则库设计为较为灵活的状态,以便动态修改。本文采用基于Java 语言开发的开源规则引擎drools[24],其可将复杂且多变的业务规则从硬编码中解放出来,以规则脚本的形式存放在文件或数据库中,通过规则库高效解决业务规则变动问题。

Fig.12 Example of expert knowledge rule base图12 专家知识规则库示例
3 系统应用效果
水下管汇安装虚拟仿真训练系统的实物操纵台如图13 所示,包括吊机操作台、绞车操作台、ROV 操作台3 个部分。

Fig.13 Physical control console图13 实物操控台
本系统同时设计了4 种模式,分别为:①自动演示模式。该模式为水下管汇操作的自动演示模式,系统严格按照操作规程进行完整的作业演示,使受训者熟悉正确操作流程;②科目训练模式。该模式依据向导提示进行安全操作训练,在每个操作步骤开始前都通过简洁的文字提示如何操作,受训者利用输入设备对部件进行操作,完成相应步骤;③自主操作模式。该模式下受训者可以对所有部件进行各种操作(包括正确的和错误的),并在虚拟环境中展示出来;④考核模式。该模式下系统对用户操作过程进行详细记录,考核结束后进行智能评分。
实物操控台、Vortext 物理引擎以及虚拟场景技术的结合使仿真系统既保持了实物操控真实感强的特点,又降低了训练操作成本。为确保水下管汇安装虚拟仿真训练系统各项功能正常运行,本文进行了缆绳、管汇抓取、管汇入水、管汇碰撞检测、水下机器人运动以及操作评分等方面的测试,测试结果均为通过,可见该系统能有效满足深水水下安装培训需求。同时在系统上针对6 种工况进行了测试,结果见表1。系统在工况1 和工况6 下的运行效果比较如图14所示。

Table 1 System test condition表1 系统测试工况
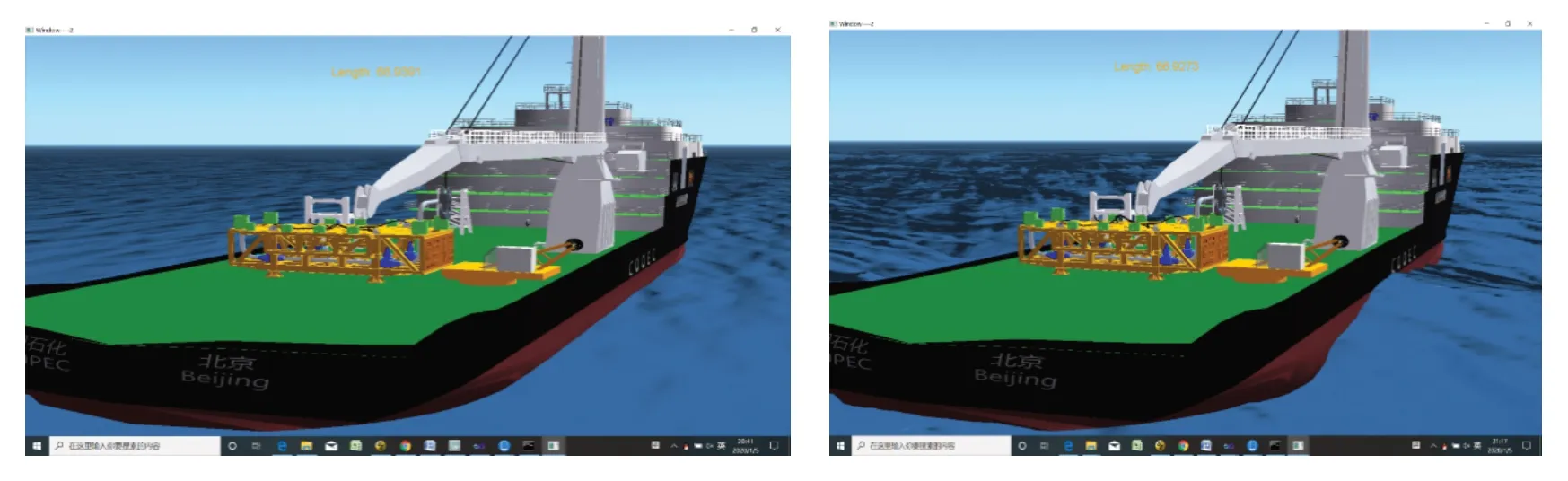
Fig.14 Comparison of operating effects of the system under condition 1 and condition 6图14 系统在工况1和工况6下的运行效果比较
4 结语
针对水下管汇在深水中安装风险大、复杂度高等问题,本文提出将Vortex 与Vega Prime 虚拟现实平台相结合,构建一个符合深水水下安装培训需求的水下管汇虚拟仿真软件系统。该系统可全面模拟管汇吊起、管汇下放、ROV 抓取管汇、ROV 推动管汇对中等安装过程,方便有效地培训工作人员掌握各种操作技能,减少实际操作中的风险。虽然虚拟仿真能在一定程度上模拟实际工况,但难免会存在一定差异。未来将致力于优化硬件设备、降低成本,并将人工智能技术应用于虚拟仿真系统中,使其能够根据操作人员表现自适应调整培训项目与进度,进一步提高培训效果与效率。
猜你喜欢
空气动力学学报(2022年4期)2022-08-23 06:51:26
散文诗世界(2022年1期)2022-01-13 00:47:13
石油机械(2021年4期)2021-04-23 08:08:26
孩子(2019年7期)2019-07-29 05:37:20
当代陕西(2019年10期)2019-06-03 10:12:42
海洋工程(2016年4期)2016-10-12 03:21:26
中国海上油气(2015年1期)2015-07-01 17:37:45
浙江大学学报(工学版)(2015年2期)2015-05-30 07:04:53
石油矿场机械(2014年4期)2014-09-07 10:35:56
火炸药学报(2014年1期)2014-03-20 13:17:22