
基于FPGA的超声手术刀频率跟踪技术设计
2023-12-01 03:44黄永国陈小红孙福佳林晓佳赵浩男
软件导刊 2023年11期
黄永国,陈小红,孙福佳,林晓佳,赵浩男
(1.上海理工大学 材料与化学学院;2.上海理工大学 机械工程学院;3.上海理工大学 健康科学与工程学院,上海 200093)
0 引言
超声手术刀又称超声刀,作为一种首选的电外科手术器械,其能够实现软组织切割和血管闭合等功能,已广泛应用于多种临床手术中[1]。超声换能器作为超声刀系统的重要组成部分之一,完成了高频电信号和超声振动之间的转化,是实现超声技术的核心部件[2]。当超声换能器以谐振频率驱动时,可以获得最大的能量转换效率[3]。但在实际工作过程中,超声换能器的温度、声负载和输入电压变化等原因造成超声换能器的谐振频率发生漂移,且偏移量很难直接使用数学模型进行计算,导致驱动信号的频率无法实时工作在换能器的谐振频率上,换能器的无功功率增加,输出振幅将明显降低[4],增加了超声刀在手术过程中的风险。同时超声手术刀的工作时间比较短,一般在10 s 以内。因此,实现快速、准确的谐振频率跟踪对超声刀的稳定高效运行具有重要现实意义。
随着超声波技术的快速发展,频率跟踪技术也被人们广泛关注。基于模拟锁相环的频率跟踪方法在工业生产中得以广泛应用,这种方法通过硬件电路实现了对换能器电流和电压信号的相位检测并进行频率调节,但是模拟锁相环的跟踪范围窄,对噪声信号比较敏感,可能导致其无法锁定换能器的谐振频率。同时,由于采用硬件电路的方式实现频率跟踪,对于不同的频率段需要更改相关电容、电阻的值,存在电路复杂、灵活性差等问题[5]。最大电流检测法也可以实现对超声换能器的谐振频率跟踪,通过检测谐振状态时换能器等效阻抗最小、电流最大的原理实现谐振频率跟踪[6]。但是,这种方法容易跟踪到换能器的其他谐振点,并且对电流的采样带宽和精度要求较高。此外,文献[7]提出通过FFT 计算出换能器电流和电压的相位差实现频率跟踪,FFT 在计算过程中需要尽可能多的数据才能得到精确的相位差,但这造成了处理时间长的问题。本文针对传统的频率跟踪方法进行改进创新,在分析超声换能器的阻抗特性后提出一种使用现场可编程门阵列(Field-Programmable Gate Array,FPGA)实现的数字式频率跟踪方案,并通过模块化完成了方案设计,这种频率跟踪方法可以实现实时的频率跟踪,优化了复杂的电路设计,同时提高了频率跟踪的速度与精度。设计的模块主要有信号发生模块、相位检测模块和数字式PID 模块,分别实现了通过数字频率合成(Direct Digital Synthesis,DDS)技术产生频率可控的驱动信号,对换能器的电流和电压信号之间的相位差进行检测和调节输出频率的功能。
1 超声换能器的阻抗特性分析
为实现超声换能器的谐振频率跟踪,首先需要对其阻抗特性进行分析。典型的换能器结构及其等效电路模型是巴特沃兹—范代克(Butterworth-van Dyke,BVD)模型[8],如图1(a)所示。其等效电路相当于两条支路并联,这两条支路分别称之为机械臂和电学臂。其中,机械臂是由静态电容C0和介电损耗电阻R0组成,C0主要由传感器材料的几何尺寸和电极表面决定;电学臂是由动态电感L1、动态电容C1和动态电阻R1组成,分别代表超声换能器的机械柔度,质量组件和机械损耗电阻[9-10]。图1(b)为超声换能器的阻抗分析结果,可知存在两个相位为零的阻抗谐振点,即谐振频率fr和反谐振频率fɑ。反谐振频率fɑ处超声换能器的阻抗较大,而谐振频率fr处的阻抗很小,因此,fr更适合作为机械谐振频率fs的替代值。同时,当f<fr或当f>fɑ时,电压信号滞后于电流信号,此时换能器处于容性状态。当fr<f<fɑ时,电压信号超前于电流信号,此时换能器处于感性状态。当f=fr或当f=fɑ时,时,流过换能器的电流信号和电压信号同相位。
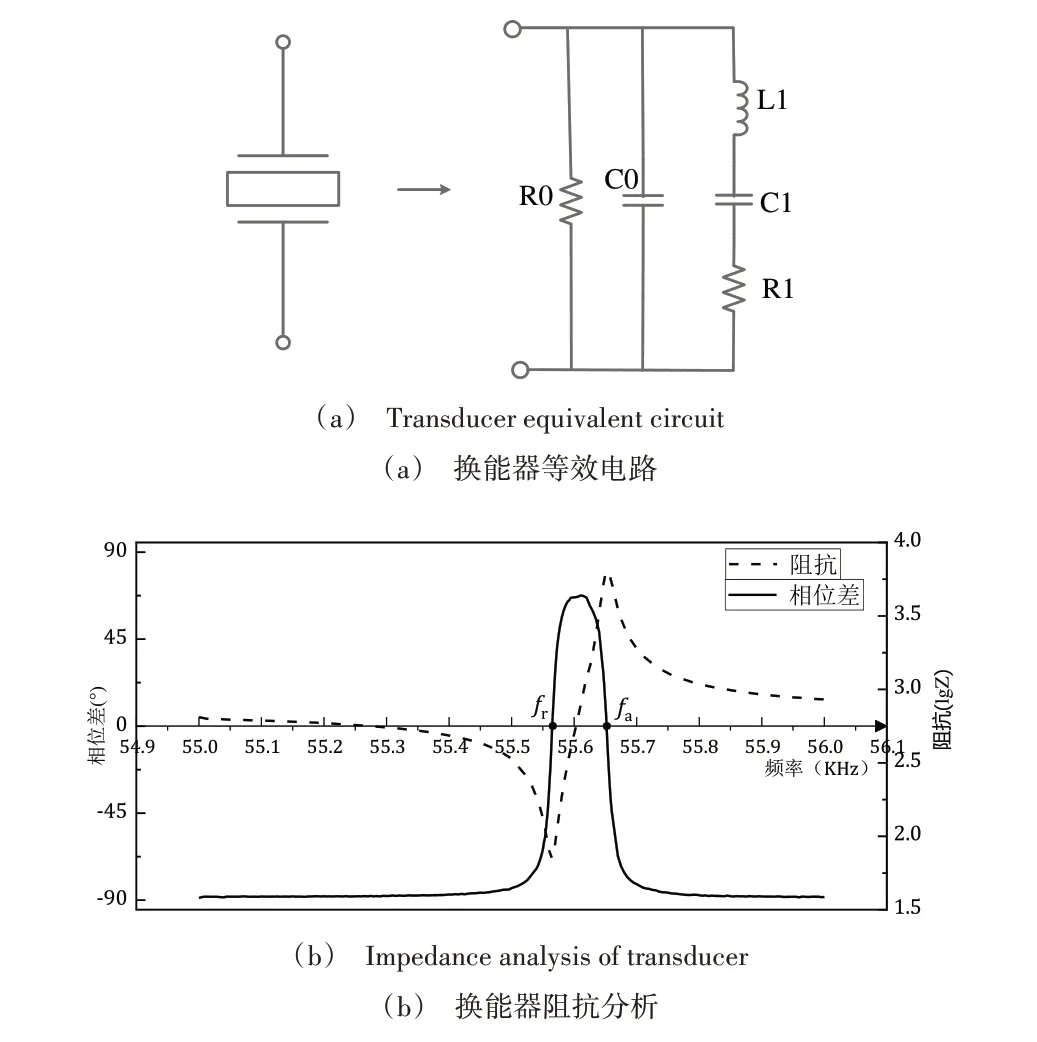
Fig.1 Analysis of transducer and its equivalent circuit图1 换能器及其等效电路分析
分别计算两条支路的阻抗,设机械臂的导纳为Y0,则有:
其中,w=2πf,f为驱动信号的频率。设电学臂的阻抗Y1,则有:
通过式(1)和式(2)可以得到超声换能器总体导纳Y和换能器角频率w的关系为:
展开式(3)得到电导G和电纳B的关系如下:
由式(4)和式(5)可以得到:
假设换能器两端的电压为Ui,电阻为R,计算换能器的输出功率P(w)为:
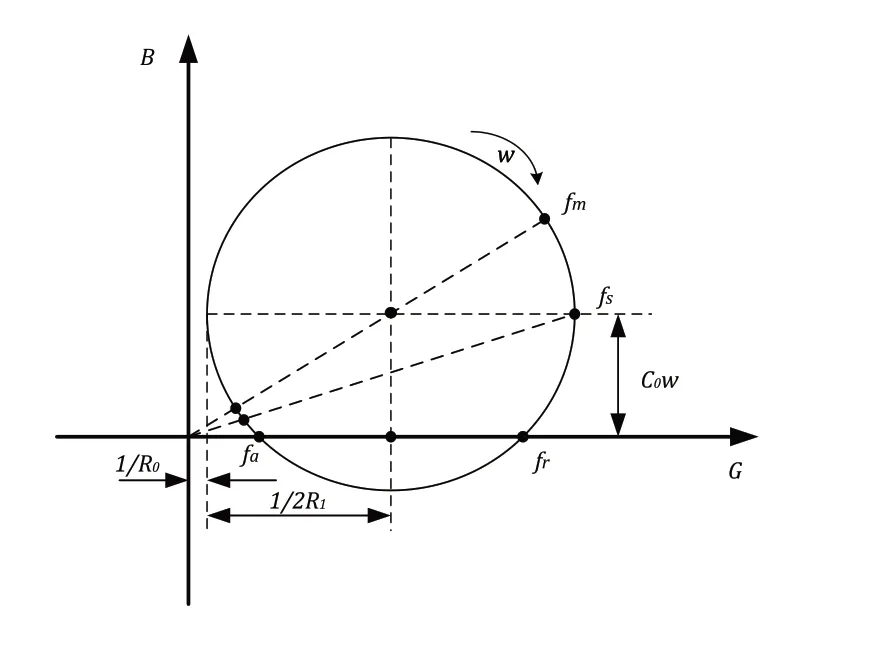
Fig.2 Admittance circle of ultrasonic transducer图2 超声换能器导纳圆
为了跟踪机械共振频率fs需要合适的方法对其进行优化。通过导纳圆可知,在忽略R0的影响后,导纳圆的圆心距离G 轴比较近时,可以近似认为fm≈fr≈fs。但导纳圆的圆心距离G 轴比较远时,fm、fr、fs之间得差异较大,一般情况下需要通过阻抗匹配[11]弥补fm、fr、fs这3 个频率点之间的差异,即通过在换能器两端添加一个合适的电感进行匹配。基于以上条件,考虑到实验所使用的换能器C0值的大小和实际工作过程中频率检测的难易程度,在此次实验中,fr将作为本文所提出频率跟踪方法的目标。
同时,为了研究换器处于谐振点和反谐振点时的特点,通过Multisim14.0 软件对上述换能器的等效RLC 电路进行仿真,施加在换能器两端的电压信号峰值为40 V,改变换能器的驱动信号频率得到换能器电流和电压的关系如图3所示。

Fig.3 Change of current and voltage phase of transducer with frequency图3 换能器的电流和电压相位随频率变化情况
由图3 可知,当驱动信号频率为谐振频率或反谐振频率时,换能器表现为纯阻性,电流和电压相位差为零,但阻抗差异较大。在相同的电压下,谐振频率时的电流信号远大于反谐振频率时的电流信号。因此可以通过判断换能器流过的电流大小区别换能器是否处于谐振状态,以避免跟踪到反谐振频率。
2 基于FPGA的频率跟踪算法设计与仿真
结合超声换能器的阻抗特性分析中提及的频率跟踪目标,对基于FPGA 所实现的频率追踪方法进行详细描述,相位检测和PID 控制算法是本文跟踪超声换能器谐振频率的核心。根据RLC 电路的特性可知,在谐振频率fr附近,驱动信号的频率改变时,超声换能器的电流和电压信号之间的相位差也随之发生改变。当驱动信号的频率等于谐振频率fr时,超声换能器电流和电压信号的相位差为零。当驱动信号的频率不等于谐振频率fr时,超声换能器电流和电压信号总是存在一个不为零的相位差,通过检测相位差的大小即可实现对输出频率的调节。为此,本文设计了频率可调的高分辨率信号发生模块,实时调节驱动信号的频率,然后对ADC 采集的电流和电压信号实现滤波并进行实时的相位差计算,最后使用PID 算法对相位差计算结果进行处理,实现对DDS 输出频率的控制。实验整体框图如图4所示。

Fig.4 Schematic block diagram of FPGA implementation of frequency tracking图4 FPGA实现频率跟踪原理框图
实验所设计的频率跟踪方法分为主要分为3 个模块:①DDS 模块,用于产生频率可控的驱动信号;②PHASE_MEASURE 模块,主要用来对采集的电流和电压信号进行相位差检测;③PID 模块,用于实现快速的频率跟踪。其中,PLL 模块、LED 模块和FIR 模块分别是时钟模块、用户指示灯和滤波器模块,通过他们配合前3 个模块共同实现频率跟踪。
2.1 激励信号产生
DDS 技术是一种基于相位概念的直接合成频率的技术[12],通过控制相位变化的速度以产生不同频率和波形的信号。该技术具有频率分辨率高、响应速度快、相位可连续性变化等特点,在数字通信领域被广泛采用,是信号生成的最佳选择。因此,实验中利用FPGA 设计一个高精度的DDS 用于产生超声刀所需要的正弦驱动信号。DDS 输出信号的频率计算公式为:
其中,N为频率控制字位宽,fclk为DDS 的工作时钟,K为频率控制字,fout为输出特定频率的信号,通过控制频率控制字K,使DDS 输出频率可调的信号。在本文实验中,DDS 输出信号的频率直接决定了换能器能否以谐振频率驱动。DDS 的结构如图5所示,主要包括计数器、波形存储表(ROM 查找表)、数模转换器DAC。通过式(9)计算出频率控制字K后将其传给到相位累加器完成相位累加计算,再将计算结果输到ROM 查找表内。ROM 表内储存了一个周期的正弦信号离散值,ROM 查找表根据相位累加值进行寻址,将对应的信号数据输出到DAC。
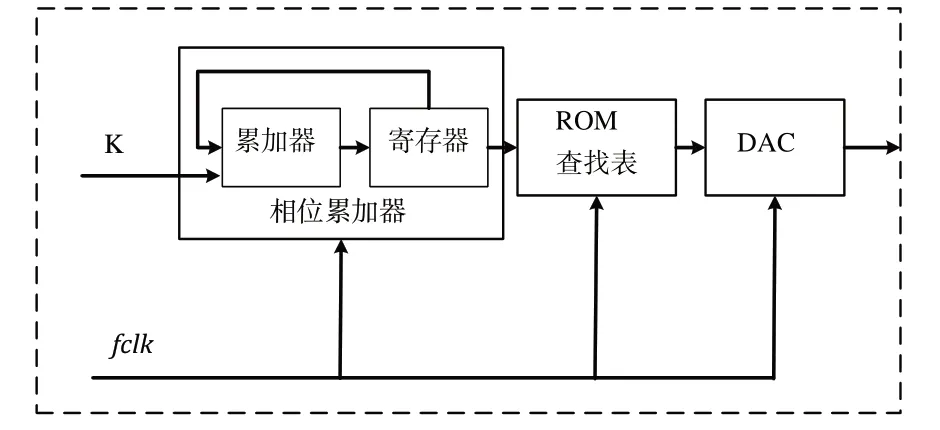
Fig.5 Structure of DDS图5 DDS的结构
为了研究DDS 输出信号的性能,对DDS 输出信号进行仿真。图6 为DDS 输出信号仿真结果,设置输出信号(sin_o)的频率为55.5KHz。由图6 可知,实际上信号的输出频率为55.494KHz,与所设置输出信号的频率存在偏差,研究发现此误差无法完全消除。这是因为使用FPGA 实现的DDS 存在相位取舍、幅度量化等原因造成输出信号存在杂散分量的影响[13-14],只能通过增大ROM 查找表的数据量和频率控制字位宽N适当减少杂散分量的影响,同时为了使得输出信号的频率变化连续,需要DAC 模拟化后进行平滑处理,实现输出高分辨率的信号。但是由于受到FPGA 片内资源限制,ROM 查找表的数据量和频率控制字位宽N不可能无限大。因此,为了尽可能节约FPGA 片内资源和满足实验需要,实验所设计的DDS 性能参数如表1所示。

Table 1 DDS performance parameters表1 DDS性能参数
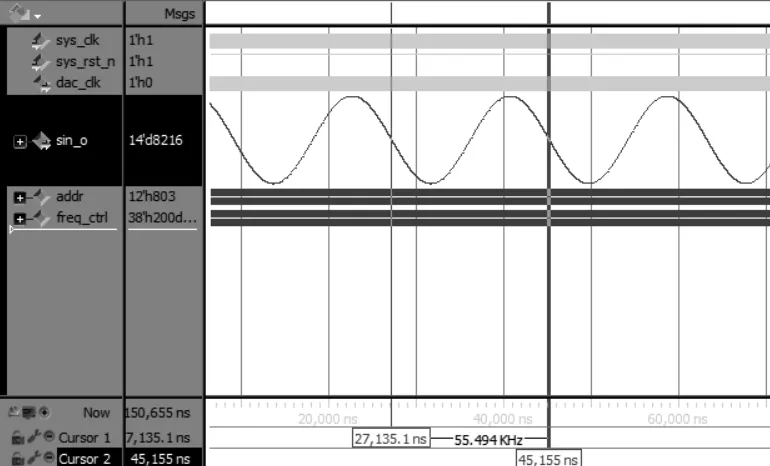
Fig.6 DDS output results图6 DDS输出结果
2.2 相位检测
相位检测指检测两个频率相同信号之间存在的相位差[15],传统的相位检测方法主要通过硬件模拟电路实现,但是模拟电路抗干扰能力差,电信号在沿线路传输过程中容易受到外界和内部电源等各种噪声干扰,噪声和信号混合后难以分开,导致相位检测质量下降。随着IC 芯片的飞速发展,数字电路得以广泛应用,其优点在于稳定性好、可靠性高[16]。鉴于此,本文使用FPGA 实现相位检测,减少了噪声信号干扰,提升了相位检测准确率,同时使电路集成化程度提高,降低了电路设计复杂性,便于后期处理和维护。相位差计算公式如式(10)所示。
其中,Δφ为电流和电压的相位差,φv、φi分别为电压信号和电流信号的相位,Tv、Ti分别为电压信号和电流信号的周期,Td为电流信号和电压信号之间的延时。
相位检测原理如图7 所示。在对换能器两端的电压和通过的电流信号进行采样后得到电压xv(t)和电流xi(t),将信号xv(t)和xi(t)经采样后送入FPGA 中使用数字滤波器降低噪声的影响,然后进行相位计算。具体检测过程为:通过比较器得到信号Tv和Ti,将Tv和Ti经过异或门得到一路包含xv(t)和xi(t)之间相位信息的信号Td,之后通过式(10)进行计算便可得到关于xv(t)和xi(t)两路信号的相位差。

Fig.7 Schematic of phase detection图7 相位检测原理
需要注意的是,在对换能器电流和电压信号的周期计算时,因为电流和电压信号频率一样,故只需要计算信号Tv或者Ti即可。并且,FPGA 只能进行定点数计算,为了提高计算精度,需要在计算过程中将相位差计算结果进行扩大处理。为了验证相位检测的正确性,使用未进行频率跟踪时采集到的电流和电压信号进行仿真。图8 为FPGA 实现相位检测仿真结果,本文对相位差扩大的处理方法是相位变化0.1°,相位计数器(Delta_pha)就增加1,因此假设相位差Δφ 为90°时,则相位计数器(Delta_pha)为900。由图8 可知,相位计数器(Delta_pha)范围为820~850,因此相位差Δφ ∈[82o,85o]。

Fig.8 Results of phase detection图8 相位检测结果
2.3 数字式PID设计
PID 算法作为一种经典的控制理论已广泛应用于各领域[17-18],它通过对误差信号进行比例、积分、微分3 个环节的计算,然后线性组合构成控制量实现对输出量的控制。本文使用PID 对相位计算结果Δφ 进行运算,将运算结果转换成频率误差,按照此频率误差对频率控制字K进行调节,以实现对驱动信号频率的控制。经典的位置式离散PID 控制理论如式(11)所示。
其中,k为采样序列,k=1,2…;ej为j次误差累积之和;uk为第k次实际输出值;ek为第k次实际输出与目标值误差,Kp、Ki、Kd分别为比例系数、积分系数、微分系数。在设计PID 过程中需要注意积分饱和作用的影响,如果积分值过大将会导致跟踪紊乱。因此,设计PID 时还需要设计相应的抗积分饱和方法,本文采用积分分离法进行抗积分饱和处理,如图9 所示。当计算出误差值(pre_err)大于1 000 时,拉高积分分离使能信号(I_sep),此时积分误差(Ierr)为零,不参与调节。

Fig.9 Simulation of PID for integral separation method图9 PID积分分离法仿真
不同的PID 参数对跟踪效率会产生较大影响,其中Kp影响系统的响应速度和静态误差,Kp过小将导致响应速度过慢,过大会使系统产生较大的震荡,同时超调量也会增大。合理地选取Ki会消除系统的静态误差,提高精度。但是在系统启动阶段总是存在较大误差,如果Ki过大会导致系统响应速度减慢,过小将会出现较大的超调量。Kd对系统干扰非常敏感,Kd越大,系统的超调量就越大,选取合适的Kd对控制超调量很重要。因此,不能单独增大或者减小Kp、Ki、Kd这3 个参数,需要根据系统进行适当调节。图10为对上述设计的离散PID 在FPGA 内的仿真结果。通过多次对PID 参数的调节与仿真,最终确定Kp、Ki、Kd为46、3、5。图10 中,PID 单次计算的输出标志,(fbout_flag)在响应64 次时目标值与真实值的误差(fb_dout)为0,实现输出值等于目标值。

Fig.10 PID function simulation图10 PID功能仿真
2.4 频率跟踪策略
对超声换能器的阻抗特性分析可知,通过改变激励信号的频率,超声换能器会发生容性和感性的电特性变化,从而导致电流和电压出现相位差。因此,在避免反谐振频率的影响时,调节输出信号的频率使超声换能器的电流和电压同相位即可实现频率跟踪。
本文设置的频率跟踪策略如下:①根据上述计算,超声换能器在空载状态下其谐振频率处于55.5KHz 附近,故在开机时设定换能器谐振频率范围在55.5KHz±500Hz,谐振频率范围的大小决定了跟踪速度的快慢,谐振频率范围越小,跟踪速度越快;②在设定好谐振频率范围后需要判断当前频率是否处于该范围,然后对换能器电流和电压信号采样并进行滤波处理;③在FPGA 中进行相位检测,实现相位差Δφ 计算,并对得到的Δφ 进行相位判断,其中Δφ 的正负代表电压电流超前滞后的关系;如果Δφ <0,则表示电压滞后于电流,处于容性状态;如果Δφ >0,则表示电压超前于电流,处于感性状态;④当检测到相位差后,将相位差传递到PID 进行运算,将计算结果通过比例计算后传递到DDS 频率控制字K,实现输出驱动信号频率的改变。重复以上工作,使得相位差一直持续在给定相位误差范围内,达到谐振频率跟踪目的。
在设计过程中,存在跟踪到反谐振频率的可能性,为了避免这种情况出现,本文给出两种解决方法:①反谐振频率总是大于谐振频率,故在感性状态减小驱动信号频率即可避免并联谐振点的干扰;②实现对跟踪电流的检测,如果检测到换能器的电流小于设定阈值,则放弃次频率点,重新从设定的频率范围内最小值处开始跟踪,以保持跟踪效果的正确性。频率跟踪策略具体流程如图11所示。
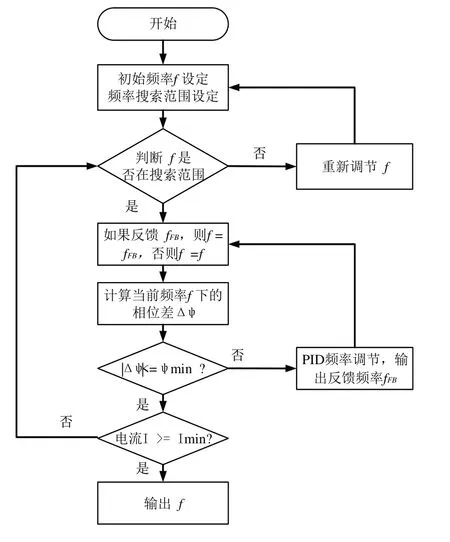
Fig.11 Frequency tracking strategy图11 频率跟踪策略
3 实验与结果分析
为了进一步验证本文基于FPGA 频率跟踪方法的可行性,实验采用Xilinx 的FPGA 芯片XC6SLX16 和DSP 双核控制实现频率跟踪系统设计,实验设备和超声频率跟踪控制系统原理框图如图12所示。

Fig.12 Principle of experimental equipment and ultrasonic frequency tracking control system图12 实验设备和超声频率跟踪控制系统原理
驱动信号由FPGA 输出后通过数模转换芯片DAC 转换为模拟信号,经过信号放大处理模块进行放大,然后经过隔离与功率放大模块处理后作用于换能器。同时,使用高速高精度模数转换芯片ADC 对换能器电流和电压信号实时采集并送入FPGA 内部进行处理。使用阻抗分析仪PV5205 对换能器的参数进行测量,得到换能器相关参数C1为11.5 pF,L1为710.68 mH,R1为75.93 Ω,C0为3.259 nF。通过式(8)计算可知,此换能器的机械共振频率为55 672 Hz。
表2 列出了设定初始频率处于换能器谐振频率附近的3 种情况,图13 为使用本文所提出的频率跟踪方法进行实验的结果,其记录了针对表2 所列出的3 种情况进行跟踪频率过程中换能器的电流和电压相位差及频率变化情况。实验在换能器空载状态下进行,设置相位差在±5°以内时认为频率跟踪完成。

Table 2 Frequencies in three initial states and states of transducers in corresponding operating states表2 3种初始状态下的频率与对应工作状态下换能器的状态

Fig.13 Frequency tracking under different initial frequencies图13 不同初始频率下的频率跟踪
由图13 可知,在设定跟踪的频率范围内,改变驱动信号的初始频率,可实现频率跟踪。但是驱动信号初始频率与换能器谐振频率之间的差值不同,最终跟踪速度也不同。通过比较曲线1、曲线2 和曲线3 可知,初始频率设定的越接近换能器的谐振频率,跟踪速度越快。同时,在设定的相位差范围内可以实现静态误差保持在±2Hz 以内的频率跟踪结果,具有较高的跟踪精度。图14 是在进行频率跟踪下对换能器电流和电压信号的测量结果,图中通道1(C1)为换能器两端的电压信号,通道2(C2)为流过换能器的电流信号,在进行频率跟踪后,换能器的电流和电压信号实现了同相位,且在多个周期内也没有出现相位跟踪失锁情况。因此,这种频率跟踪策略可以很好地实现频率跟踪,满足换能器工作过程中对其谐振频率的跟踪要求。
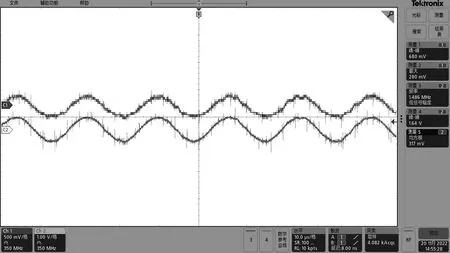
Fig.14 The relationship between current and voltage of transducer图14 换能器电流电压关系
4 结语
本文所提出的频率跟踪技术相对于传统的频率跟踪技术在实现方式上有所创新,实现了数字式频率跟踪。该频率跟踪技术以FPGA 为核心控制,详细介绍了频率跟踪的工作原理和实现方法。在给定最大相位误差的情况下可以实现±2Hz 以内的频率跟踪结果,且跟踪速度快,在超声手术刀频率跟踪领域具有较广的应用前景。同时,由于FPGA 具备灵活、高速的特点,本文提出的频率跟踪技术在后期可以灵活进行调整、改进,并且跟踪速度还有很大提升空间。此外,该跟踪方法还有继续优化的空间:一方面,在相位检测模块可以提高时钟工作频率从而提高频率跟踪精度;另一方面,可以优化PID 算法的参数,例如通过模糊控制、粒子群算法等[19-20]方法实现对PID 参数的自适应调节,以提高频率跟踪效率。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
雷达与对抗(2015年3期)2015-12-09
电源技术(2015年2期)2015-08-22
