
基于雷达的新型长壁煤矿机器定位自动化研究
2023-11-30 04:45李鹏
机械管理开发 2023年10期
李 鹏
(晋能控股煤业集团有限公司技师学院,山西 大同 037003)
0 引言
煤层通常是夹在岩层之间、高度不等的连续楔形煤。煤炭开采过程的目标是以一种高效和安全的方式提取尽可能多的这种煤层,同时对周围环境的影响最小。在长壁煤矿中,两条被称为“闸道”的长期水平巷道被切割进煤层中,形成被称为“长壁板”的大型矩形煤块的主要边界。道路采矿设备的主要部分是安装在后面的面板。随着开采的进行、地质和设备的相互作用造成长壁工作面压力的变化,导致工作面设备向闸板巷道的侧向滑动逐渐增加,称为长壁蠕变。如果不进行检查,可能导致长壁设备最终撞到大门路肋,有效地使脸陷入停顿。后退和蠕变对应了长壁闸门巷道采矿设备的沿轨和跨轨位置。由于该设备与整个长壁工作面机械连接,因此闸门道路机械的准确定位能够改善长壁工艺的管理。相对定位(即对周围矿山基础设施如隧道壁的测量)和在整个矿区内的绝对定位都是至关重要的[1-3]。
针对这一应用开发的特定雷达系统改编自FMR 250 工业雷达液位传感器。本文选择这种传感器的首要考虑因素是它能在爆炸性环境中使用,这是煤矿井下富甲烷环境中电气设备运行的关键要求。
1 系统实验
1.1 雷达系统初始测试
雷达装置安装在装满煤的盒子上方的可移动龙门上,以便在采煤坑的各个点进行测量。测试包括对煤表面的基本测距,以及基于煤表面上通常会在矿井环境中遇到的各种目标的雷达响应变化的详细分。肋壁表面没有任何杂乱,这为初始概念验证测试提供了理想的条件。为了在现实条件下对传感器进行完整的现场试验,需要在更现实的条件下,包括在典型煤矿中发现的管道、标志和其他金属结构的存在下,对采煤巷道进行一段重要的试验。
1.2 传感器平台系统
井下试验采用了一套完整的传感器硬件,安装在一个试验平台上,该平台设计将仪器设置在与闸门路矿井机械相同的高度。本文开发了一系列定制的应用软件,以获取和同步不同的传感仪器的数据。试验使用的传感器有主雷达单元,基于26 GHz Endress Hauser 仪器;三个SICK LMS 200 激光扫描仪,两个安装在航行方向的侧面,扫描隧道壁(以验证蠕变测量),第三个在航行方向(以提供与系统撤退估计比较的基础);用于地下的低照度摄像机;数据采集PC 机(标准便携式计算机)。实时数据采集系统对来自雷达和激光扫描仪的数据进行时间同步,允许快速后处理、比较分析和数据融合。试验后的数据处理是在Matlab 中进行的,但数据存储和检索协议是为了最终集成到现有的实时长壁自动化软件系统。
1.3 系统测试描述
在距离肋墙不同偏移距离处,沿着确定的门路段进行了一系列测量。目标被定位在测试航向的每一端为雷达数据提供一个可靠的沿航迹参考从前看激光扫描仪。在2 d 的测试期间,总共获得了26 个数据集。在大多数测试中,雷达传感器被放置在测试台车沿轨道前进方向的90 处,传感器直接指向肋壁,以提供对蠕变距离的直接测量。金属网格为雷达传感器提供了一个额外的杂波源,因此还对试验巷道的整个试验长度进行了额外的扫描,以确保能够生成一个真正具有代表性的数据集,其中包含了绝大多数地下煤矿中遇到的最常见的顶板和肋板条件。
2 试验结果
原始雷达数据由雷达信号的“包络曲线”组成。通过掩蔽和背景减法滤波的应用,消除了发射和接收电路之间的增益偏差和串扰等信号伪影。单个雷达轨迹被叠加,形成雷达输出的三维时变显示。图1 显示了在距肋墙4 m 的雷达偏移距离下测试的典型结果。图1 中两个值得注意的特征是:与侧隧道相关联的明显的缺口对应着一个直通通道,以及与高反射壁挂式螺栓板相对应的主信号回波的频繁峰值。
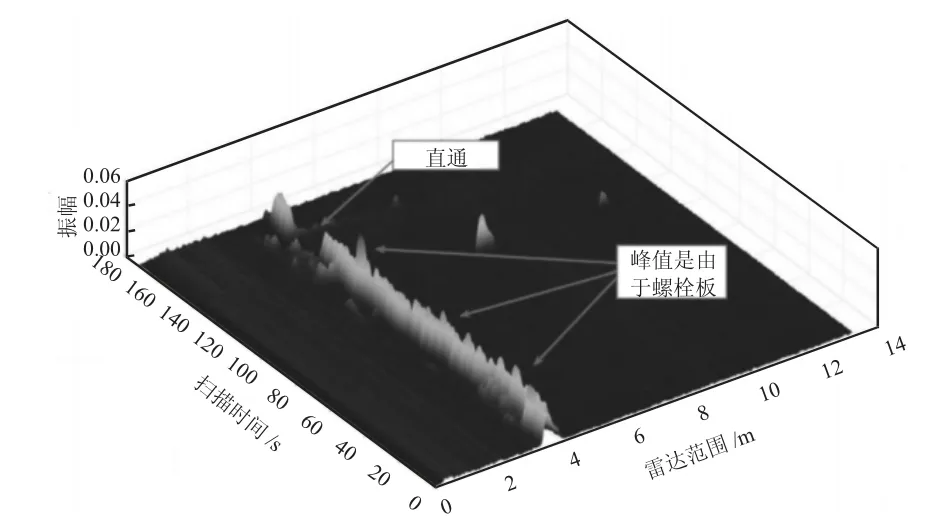
图1 一段带截通的门路雷达数据重建
通过合并来自前向扫描器的数据,评估了门路截面的重建平面视图,使用激光扫描仪进行了几次测试,以捕获大门路肋和屋顶的整个表面(见图2)。进行这些扫描是为了绘制更完整的地雷环境图像。屋顶的扫描雷达和激光传感器也获得为了测试技术的功效在存在网状表面。详细的屋顶侦察支持激光扫描仪的数据见图3。在图2 和图3 中,变化与激光的范围相对应。

图2 一段门路拱肋及顶板激光三维重建
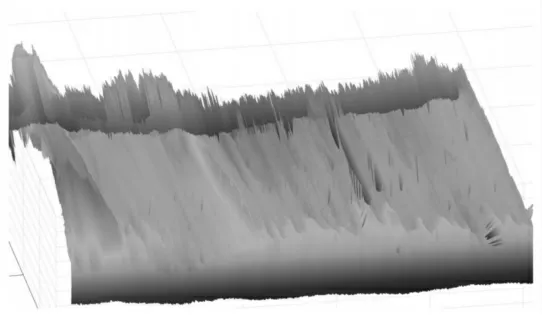
图3 网格的详细屋顶部分的激光重建
3 分析与讨论
从KF 获得的蠕变位置估计与激光扫描仪的数据进行了比较,激光扫描仪指向与雷达传感器相同的肋壁。激光扫描仪生成了离散点的二维扫描线(而不是雷达的单点测量),因此使用激光数据点的中心的平均值进行比较。当激光扫描仪隔爆窗口被灰尘或泥浆遮挡时,会出现较大的垂直偏差,导致在窗口清洁之前对传感器的估计不准确。这一结果证明了基于雷达的传感方法的价值,因为雷达安装在靠近激光扫描仪的外壳中,而不受有效蒙蔽激光的相同灰尘条件的影响。
锚杆支护方式是地下矿山防止巷道塌方的主要支护手段,是矿山严格控制的。因此,安装在闸门道路一段的螺栓数量是一个已知的环境采矿参数,通过跟踪从前一个割道开始遇到的螺栓数量,可以准确地估计采煤机沿轨道的位置。在两个过滤后的数据集中,与许多经过的螺栓相关的连续波峰和波谷很容易识别。
本文采用了一种新的数据融合和视觉分析方法,该方法基于将激光扫描仪和雷达数据结合在一个三维交互式显示器中,以方便检查重要特征。使原始雷达数据可以直接与激光扫描仪数据生成的表面进行检查。在试验过程中,激光单元被定向在垂直平面上扫描,以捕获门路肋条和车顶的整个表面,并利用激光和雷达传感器之间的同步,雷达回波信息可以覆盖,与激光数据提供的高分辨率点云结构相对应。通过调整雷达回波覆盖在投影肋壁结构上的截面,可以观察雷达回波的不同方面的变化,并与激光点云的具体特征相关联。将这种目视检查数据融合方法应用于矿场试验的激光和雷达联合数据集,使雷达回波信息投影到激光扫描仪数据生成的三维表面上。
4 结语
本文描述了一种新的基于雷达的系统,用于地下矿机定位。该方法通过利用地面采矿环境中已经存在的采矿结构(如螺栓板和切割)来生成特征丰富的雷达信号返回,从而避免了安装额外的参考基础设施的需要。探索了不同的概率数据处理技术,以提供设备沿轨和跨轨位置的估计。这些估计后来通过使用激光测距扫描仪进行了验证,发现非常吻合。这些试验的成功促进了一种改进系统的开发,该系统现在已经准备好集成到作业矿井机械自动化系统中。
猜你喜欢
中国特种设备安全(2022年5期)2022-08-26
四川建筑(2020年1期)2020-07-21
减速顶与调速技术(2018年1期)2018-11-13
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
山西煤炭(2015年4期)2015-12-20
现代营销·经营版(2015年3期)2015-04-20
价值工程(2014年2期)2014-10-09
中国科技纵横(2014年13期)2014-08-27
现代营销·经营版(2013年5期)2013-05-14
科技致富向导(2013年3期)2013-04-15
