
变电站无人机巡检安全距离仿真与试验
2023-11-30 11:33刘庆达刘雪冬郭铁滨丁伟刘旭
科技与创新 2023年22期
刘庆达,刘雪冬,郭铁滨,丁伟,刘旭
(国网吉林省电力有限公司吉林供电公司,吉林吉林 132001)
目前变电站巡检普遍采用“人工为主、机器人为辅”的巡检模式,机器人辅助巡视一定程度上缓解了运维人员的巡检压力,提高了发现设备缺陷的能力,但受活动范围限制及设备结构和季节气候的影响,无法实现站内设备全覆盖,尤其是在北方冬季寒冷地区,站内现场冰雪覆盖,机器人巡视路线受阻,严重时无法开展有效巡视,极大降低了设备巡检质量[1]。无人机巡检除具备设备日常巡检功能外,将无人机应用到冰灾、雪后、特殊保电时期、危急人身安全的严重设备缺陷诊断等特殊环境中开展变电运维工作,可以有效弥补机器人巡检存在的不足[2]。将无人机应用到变电巡检工作中,组建“无人机+机器人+人工”混合智能巡检模式,构建全方位、无死角的三维巡检体系,可实现变电站巡检智能化、立体化和可视化[3]。
目前无人机技术在电力系统的应用主要集中于高压输电线路巡检领域,福州、乌鲁木齐、昌吉等地陆续在变电站内开展无人机巡检试点工作[4]。大部分研究学者主要从理论上对应用前景、功能需求、控制技术等方面展开研究,在无人机与变电站高压电气设备安全距离方面研究较少。由于变电站内环境复杂、设备种类众多且纵横交错,不同带电设备间存在很强的电磁耦合,超强的电磁环境对无人机巡检时安全距离提出了更高的要求和挑战[5]。若无人机巡检时的距离太近,带电设备可能对无人机金属外壳放电,造成无人机损坏坠毁,严重时造成系统接地故障,危害变电设备安全稳定运行[6]。因此,开展变电站无人机自主巡检安全距离研究具有重要的理论意义和工程价值。
为此,本文以220 kV 变电站无人机巡检为应用场景,以典型220 kV 变电设备为研究对象,搭建无人机与220 kV 设备的三维仿真平台,开展变电设备电场环境和电磁环境下无人机耐受仿真试验,最终确定无人机巡检的临界安全距离。
1 无人机巡检安全距离仿真试验
无人机在变电站内巡检的安全距离取决于高压电气设备电场和磁场分布对其影响程度。选取四旋翼无人机经纬M300RTK,搭建无人机与220 kV 设备的三维仿真平台,研究无人机在电场和磁场环境下的耐受水平。
1.1 电场环境安全距离仿真试验
变电站站内导线纵横交错,无人机与导线发生间隙放电的概率较大。选取LGJ-300/40 导线,无人机尺寸为40 cm×40 cm,电机尺寸为2.6 cm×Φ2.8 cm,间隙放电试验原理如图1 所示,仿真平台如图2 所示。工频试验变压器型号为YDTW-500 kV/500 kVA,最高可输出500 kV 电压,无人机距导线间隙按步长5 cm,由7~42 cm 分为8 个间隙,每个间隙下电压从低到高,直至间隙产生放电现象,每个间隙放电做20 次试验,试验结果如表1 所示。
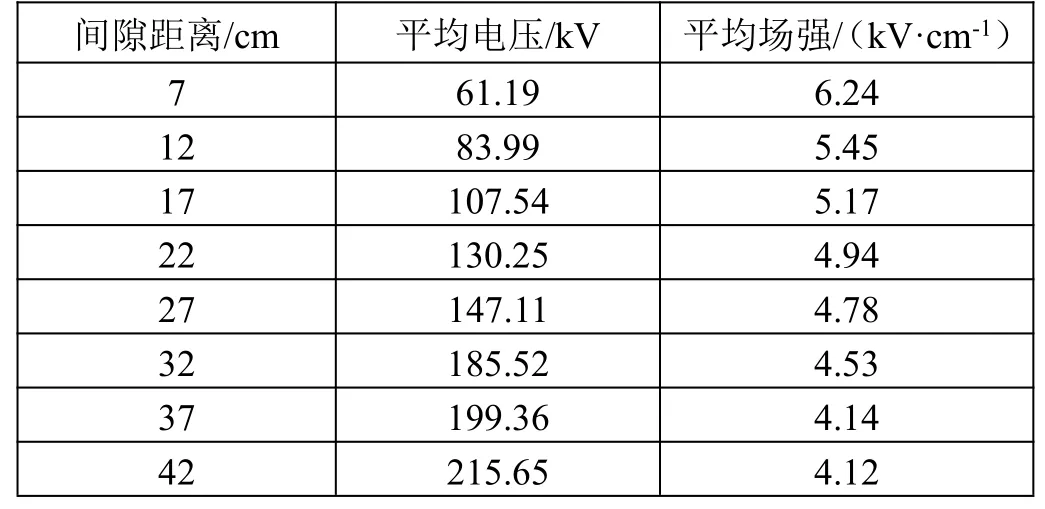
表1 间隙放电仿真试验结果

图2 间隙放电仿真平台
从表1 中的数据可以看出,无人机与导线的间隙距离越大,平均放电场强越小,原因为:由于无人机机翼两端电机与导线均等效为圆柱体,当间隙距离较小时,二者之间的间隙放电相当于球-球间隙放电;而当间隙距离较大时,则相当于棒-棒间隙。无人机在变电站巡检时,为保证巡检的安全性,无人机与带电导线的距离不可能太近,因此,放电间隙可按照棒-棒间隙模型计算。综上所述,在仅考虑电场强度对无人机飞行的影响时,电场强度不得超过3.84 kV/cm,飞行的临界安全距离为37 cm。
1.2 磁场环境安全距离仿真试验
为简化计算,选取水平分布的三相导线进行磁场仿真分析,图3 为单根导线的磁场等值线。由图3 可知,磁场强度以导线为同心圆向外侧磁场强度逐渐减小,无人机机翼两端磁场分布明显,这是由于两侧直流电机内部磁质材料的产生,机身其他部分的磁导率为1。
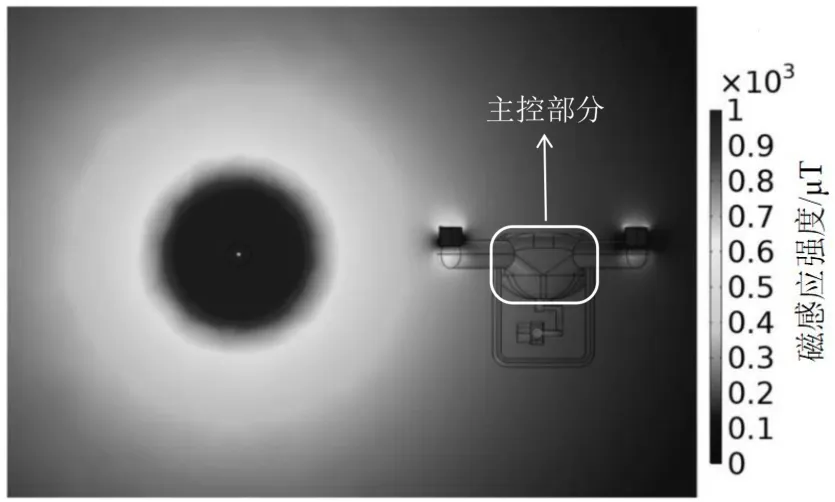
图3 导线磁场分布
设置导线流过100~300 A 的电流,仿真得到不同间隙距离的磁感应强度,如图4 所示。当磁感应强度大于200 μT 时,无人机主控装置数据传输会出现丢失或中断,指南针工作时会受到严重干扰,影响正常飞行,因此将磁感应强度临界值设置为200 μT。在无人机实际应用过程中,由于磁感应强度难以测量,为了更加直观观测,采用负荷电流来表征磁场安全距离,如图5 所示。图5 中的曲线可近似采用公式表示,即L=0.14I-19.1,其中L为磁场安全距离的数值,I为流经导线的负荷电流的数值。

图4 磁感应强度与间隙距离关系曲线
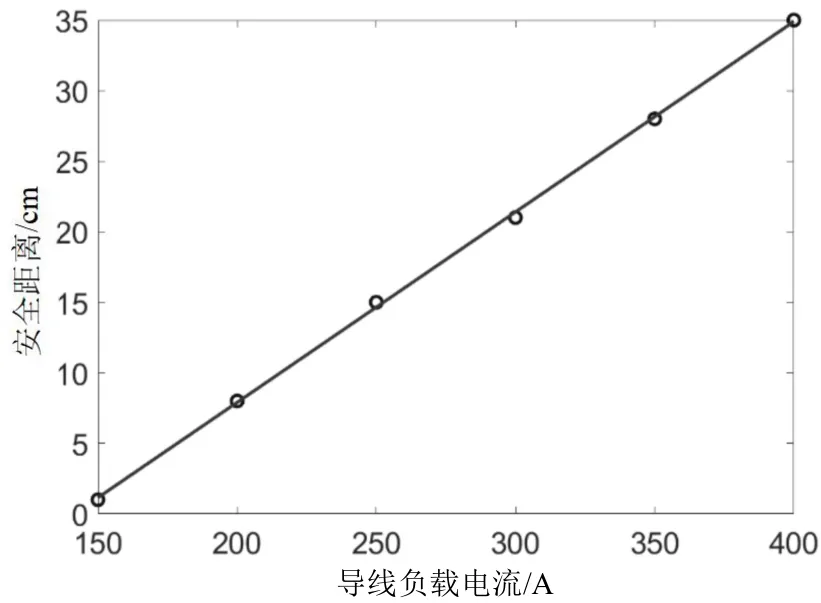
图5 导线负载电流与安全距离关系曲线
2 无人机巡检安全距离判据仿真分析
由电场、磁场仿真分析可知,无人机在变电站内巡检应综合考虑二者对无人机飞行的影响,选择磁场安全隔离与电场安全距离的最小值作为无人机飞行的临界安全距离,如图6 所示。
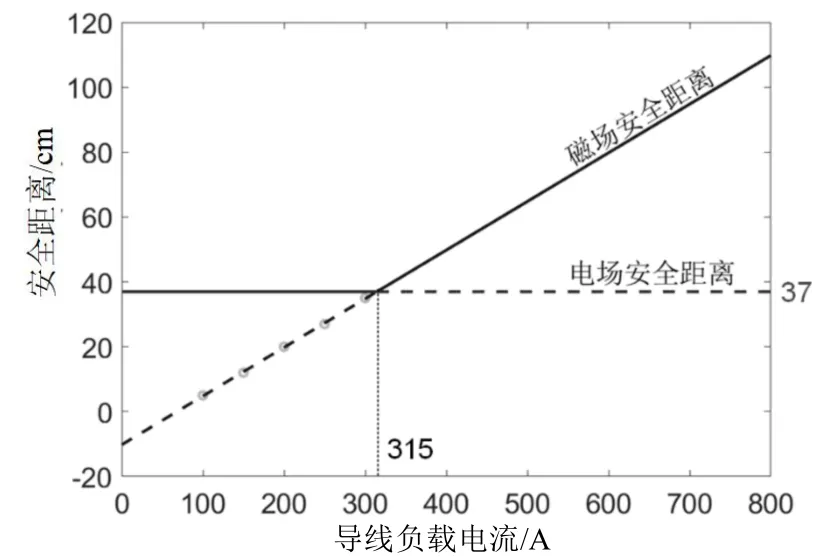
图6 无人机飞行的临界安全距离
由图6 可知,当导线负载电流小于315 A 时,无人机飞行临界安全距离为37 cm;当导线负载电流大于315 A 时,无人机飞行临界安全距离取决于磁场安全距离。
3 结论
无人机变电站巡检与高压导线的安全距离应综合考虑电场和磁场对无人机飞行的影响,飞行临界安全距离选取磁场安全距离和电场安全距离的最小值。
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
通信电源技术(2018年5期)2018-08-23
黑龙江电力(2017年1期)2017-05-17
中学生数理化·高二版(2016年12期)2017-02-28
新高考·高一物理(2016年7期)2017-01-23
电子制作(2016年21期)2016-05-17
中学生数理化·高二版(2016年9期)2016-05-14
Coco薇(2016年1期)2016-01-11
