基于Moran过程的建筑行业施工人员安全行为随机演化博弈分析
2023-11-28 05:10:02尹朝阳庞奇志王柯钧张欣仪
安全与环境工程 2023年6期
尹朝阳,庞奇志,王柯钧,张欣仪
(中国地质大学(武汉)工程学院,湖北 武汉 430074)
建筑行业安全形势严峻,频发的建筑安全事故威胁着人们的生命和财产安全。人的不安全行为被认为是建筑安全事故发生的主要原因,Haslam等[1]的研究表明,大约88%的建筑行业安全事故是由于人的违章操作、违规使用以及有意识和无意识的不安全行为导致的。因此,控制人的不安全行为,对于预防和减少建筑安全事故具有重大意义。
人的行为动机是导致该行为发生的前提。成本收益理论认为,人的行为选择是成本-收益分析的结果,只有在预期行为成本小于行为收益时,人的行为动机才会转化为实际的行为[2]。演化博弈理论正是基于行为策略的成本与收益,通过对行为决策过程的分析,进而确定最终的行为演化稳定策略。运用演化博弈理论可以很好地解释现实生活中人的某些行为或策略被频繁选择的原因,故而被广泛运用在建筑安全[3-4]、安全监管[5]、碳排放问题[6]等领域,但也存在着部分博弈结果与实际情况不吻合的问题,因此博弈结果的真实性仍有待提高。
成本和收益是进行博弈分析的基础,但受到人的主观判断偏差和价值感知差异的影响,人感知中的收益相较于实际收益存在着差异。为了更好地模拟博弈者真实的决策行为,Kahneman等[7]提出了前景理论;周国华等[8]运用该理论,对演化博弈中的期望收益矩阵进行了修正,以感知收益替代实际的收益;仇国芳等[9]将工作不安全感与前景理论联系起来,对施工人员与安全管理人员间的博弈进行了分析;成连华等[10]扩宽了博弈的对象,基于前景理论分析了多个建筑施工主体间的演化博弈过程。
上述研究虽然考虑了感知收益对博弈的影响,但演化博弈理论存在的假设缺陷问题仍未得到解决。演化博弈理论认为博弈发生在无限大的群体中,但现实中参与博弈的人数是有限的。因此,Taylor等[11]提出了基于Moran过程的随机演化博弈动态分析,考虑了博弈人数对博弈结果的影响;而后,Nowak等[12]分析得出了随机演化博弈策略稳定应当满足的条件;孟繁锦等[13]利用随机演化博弈理论研究了疫情下的国际疫苗合作问题;杨富强等[14]总结出不同干扰强度下矿工安全行为稳定的条件。但目前对于建筑行业施工人员安全行为博弈的研究多建立在演化博弈的基础上,尚缺少随机演化博弈应用的先例。鉴于此,本文建立了建筑行业施工人员安全行为随机演化博弈分析模型,对其行为决策过程展开随机演化分析,并在随机演化博弈分析中引入前景理论,考虑从众心理对施工人员行为策略选择的影响,分别对博弈矩阵和博弈分析方法进行修正,以期能够获得更为真实的博弈结果,为建筑行业施工人员不安全行为的控制与干预提供依据。
1 博弈模型假设
针对建筑行业施工人员的行为策略选择,做出如下假设:
假设一:施工人员共计N人,且彼此之间并无差异,将其行为策略抽象为安全行为和不安全行为两种。
假设二:行为策略收益取决于施工人员自身感知而非实际效用,收益感知符合前景理论的形式。前景理论认为人在进行行为决策前会预先假设一个参考点,根据参考点与实际结果间的差值来衡量收益或损失;针对不同的结果表现出不同的风险偏好,高出参考点的结果视为收益,表现为风险规避,低于参考点的结果视为损失,表现为风险喜好;相比于收益,损失产生的感知更为显著,伴随着感知的增加,产生的影响也会因边际效应而递减;此外,人的行为决策特点还表现为对大概率的估计不足和对小概率的高估。采用V=T(ΔX)w(ε)表示前景价值函数[其中,V表示对事件的感知;ΔX表示实际收益与参考点之间的差值;T(ΔX)表示对于偏差ΔX产生的主观价值感知;ε表示事件发生的概率;w(ε)表示对于概率ε的主观决策权重函数]。
假设三:施工人员完成工作可得到报酬感知I;C1、C2是其选择安全行为和不安全行为时付出的成本,有C1>C2,意味着安全行为需要更高的行为成本。
假设四:安全管理人员会对施工人员的行为进行激励,施工人员对安全奖励的感知为R,对处罚的价值感知为F;但由于施工现场环境复杂,安全管理人员能力有限,不安全行为仅有一定概率p1被发现,此时施工人员可能获得安全奖励,对此感知为R1。
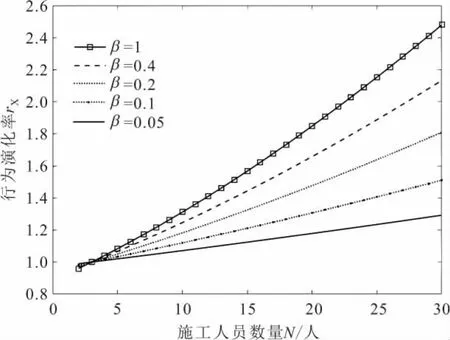
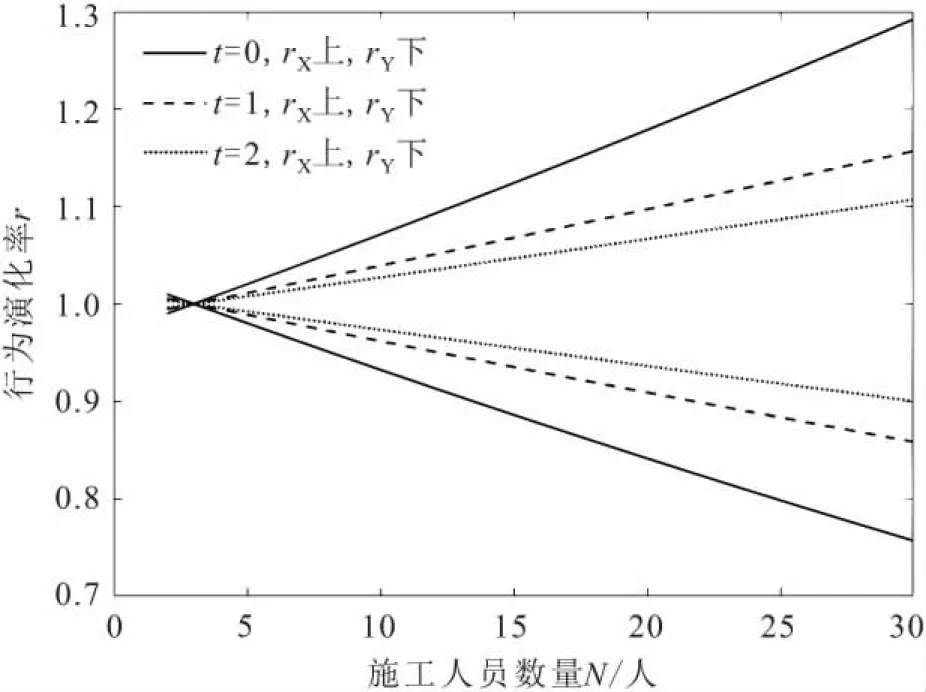
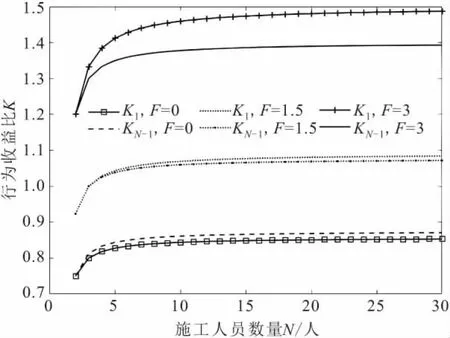
假设五:施工人员的行为决定现场安全风险的高低,当博弈双方均选择安全行为时安全程度最高,此时安全风险成本为0。仅有一方做出不安全行为时的风险要低于双方均做出不安全行为时的风险,k1表示前者相对后者的风险折扣系数;p2表示双方均选择不安全行为时事故发生的概率;L表示此时施工人员对于安全风险的感知;k1L表示仅有一方选择安全行为时,不安全行为方需承担的风险成本;考虑到事故可能波及周边作业人员,以k2L表示此时另一方承担的安全风险,其中k2为风险传递系数,此系数较小,且k2 本文采用前景价值函数对各项感知收益进行展开。对于确定发生的事件,如必然获得的劳动报酬或奖励、需要支付的行为成本等,具体展开结果如下:工作报酬收益感知I=T(i);行为成本感知C1=T(c1)、C2=T(c2);做出安全行为获得的奖励感知R=T(r)(其中,i、c1、c2、r等参数是对应事件的实际收益或成本)。 对于概率发生的事件,即面临的安全风险和做出不安全行为后获得的奖励与惩罚,可以R1为例进行分析。根据假设四,施工人员不安全行为被发现的概率为p1,此时获得的安全奖励为0;施工人员不安全行为未被发现的概率为1-p1,此时获得的安全奖励为r,即: R1=V(0)π(p1)+V(r)π(1-p1) =V(r)π(1-p1) 同理,可得处罚的价值感知F=V(f)π(p1);安全风险成本价值感知L=V(l)π(p2)(其中,r、f为实际的奖励与惩罚值;l为实际的事故损失)。 根据上述假设,构建了建筑行业施工人员A、B博弈收益感知矩阵,如表1所示。 表1 建筑行业施工人员A、B的博弈收益感知矩阵 建筑施工人员数量为N,假定选择安全行为策略(X)的施工人员数量为i,选择不安全行为策略(Y)的施工人员数量为N-i,则施工人员选择安全行为和不安全行为的期望感知收益分别表示如下: (1) (2) 建筑行业施工人员的行为选择除与期望感知收益有关外,还会受到内外部因素的干扰,后者可能导致施工人员做出不理性的行为决策,将此因素采用选择强度因子β来表示,β∈[0,1],则施工人员选择安全行为和不安全行为的线性期望效用函数分别表示如下: fX(i)=1-β+βπX(i) (3) fY(i)=1-β+βπY(i) (4) 其中,β=1的情况被称为强选择,此时施工人员的行为选择完全取决于期望感知收益;β→0的情况被称之为弱选择,此时施工人员的行为选择主要受内外部因素的影响。 演化博弈理论认为博弈者可通过对他人行为策略的模仿,不断修正自身的行为策略,最终实现系统的稳定,在此过程中个体的行为可以通过模仿进而扩散至整个群体,扩散的速率取决于行为的收益和种群中该行为的频率[15]。社会学习理论指出,个体对于模仿对象行为的选择基于两方面考量:一方面是收益,人们会选择收益高的行为策略进行模仿;另一方面是从众心理,人们会选择跟随种群中大多数人行动[16],两种因素共同决定个体行为策略选择的结果[17]。因此,除行为策略收益以外,从众心理带来的影响也应当纳入演化博弈分析的过程中。陈洋等[18]研究认为从众心理效用是与行为策略选择人数相关的增函数,并用参数t表示从众心理效用因子。 综合考虑行为策略收益和从众心理,基于Moran过程构建一种新的行为策略选择机制,施工人员将以此进行行为策略的更新:在每一步更新过程中,从种群里随机挑选一个个体复制其策略,复制的速率与期望效用函数、从众心理效用因子成正比,与此同时在剩余个体中随机挑选一个个体,新复制的个体将对其进行替代,此次更新随即完成。种群中有i名施工人员选择安全行为策略发展至i+1名、i-1名施工人员选择安全行为策略以及行为策略选择人数不变的概率分别表示如下: (5) (6) Pi→i=1-Pi→i+1-Pi→i-1 (7) 上述过程存在两个稳定状态,即i=0和i=N,其分别表示所有施工人员均选择不安全行为和均选择安全行为。 用φi表示刚开始有i名施工人员选择安全行为发展至均选择安全行为时的概率,由全概率公式φi=φi+1Pi→i+1+φi-1Pi→i-1+φiPi→i代入边界条件φ0=0、φN=1,则有: (8) 特别的是概率φ1,将仅有一人选择安全行为,发展至种群均选择安全行为时的概率称为安全行为的固定概率,记为pX。同理,不安全行为的固定概率为pY。其表达式如下: (9) (10) 当β=1时,施工人员的行为选择结果完全由期望感知收益决定,不受内外部因素变化和从众心理的影响。可用行为收益之差来判断行为策略的演化情况,令M=C2+R+F-C1-R1,则有: (11) (12) 上式中:E1和EN-1分别表示仅有一人选择安全行为与仅有一人选择不安全行为时施工人员的安全行为与不安全行为收益之差。 当E1>0时,意味着施工人员的安全行为可以取代不安全行为,抵抗不安全行为的入侵;同理,当EN-1<0时,意味着施工人员的不安全行为可以取代安全行为,抵抗安全行为的入侵。为了使施工现场具有最佳的安全状态,在强选择(β=1)下应有E1>0且EN-1>0,其意味着安全行为将取代系统中的不安全行为,此时存在N0: 当β→0时,施工人员的行为选择结果则由随机因素决定,主要受内外部因素的影响。在β→0下对公式(9)、(10)进行泰勒展开,有: (N+1)k1L-(2N-1)k2L] (13) (N+1)k2L-(N-2)L-(2N-1)k1L] (14) 3(N-1)M+2(N-2)L+(N+1)k1L> (2N-1)k2L 3(N-1)M+(N-2)L+(2N-1)k1L> (N+1)k2L Nowak等[12]提出:随机演化博弈中行为策略X作为演化稳定策略(ESSN),应满足以下两个条件:①行为策略X可以抵抗行为策略Y的入侵,即EN-1>0;②行为策略X不能被行为策略Y取代,即pY<1/N。 当系统仅有安全行为一个演化稳定策略时达到最佳的安全状态——施工人员均选择安全行为,不存在关于不安全行为的稳定,此时有:E1>0;EN-1>0;pX>1/N;pY<1/N。根据对强、弱选择下施工人员行为演化动态的分析,将条件进行展开(其中M=C2+R+F-C1-R1),则有: (N-1)(M+L-k2L)>L-k1L (N-1)(M+k1L)>k2L 3(N-1)M+2(N-2)L+(N+1)k1L> (2N-1)k2L 3(N-1)M+(N-2)L+(2N-1)k1L> (N+1)k2L 通过对条件进行一阶求导,可以得到各因素变化对安全行为策略稳定性的影响,即增加不安全行为成本(C2)、降低安全行为成本(C1)、提高行为奖励和惩罚力度(R、F)、提高不安全行为查处率(p1)以及事故感知损失(L)对于安全行为策略达到稳定具有显著的作用。 但在施工人员实际的行为选择过程中,由于人的有限理性和信息偏差,且受建筑施工现场复杂环境、主观判断偏差、价值感知差异、风险偏好等的影响,施工人员实际的行为选择结果往往会与理想情况之间存在差异,导致现实中上述条件更难以实现,影响施工人员安全行为的稳定,具体分析如下: 1) 安全监管能力有限。建筑安全管理人员通常是以流动监管的方式对施工人员进行管理。一方面,建筑施工现场人员众多、环境复杂,安全监管人员的数量和能力有限,难以精准监督施工人员的行为;另一方面,施工人员往往会掩盖自身的不安全行为使得安全管理人员难以发现,这有利于做出不安全行为的施工人员逃避处罚,获得安全奖励,有π(p1) 2) 较高的安全行为成本。为了有效预防建筑安全事故,国家、行业、企业在规章制度上从各个方面对建筑施工人员提出了严格的要求,需要施工人员予以落实。但考虑到施工人员普遍学历和安全素养不高,施工人员为理解和执行这些规章制度需要付出大量的时间和精力,即支付较高的安全行为成本,而采取不安全行为只需要付出少量成本,故C1远大于C2。 3) 对事故认知的局限性。施工人员对于事故的认知多是来自于事故案例和个人的感知等,这种主观上的认知小于实际的事故伤害,有V(l) 4) 过度自信的影响。由于对自身能力与素养的过度相信,施工人员普遍认为自己的不安全行为不会被发现或是不会导致事故的发生,即便发生了事故也有应对的方案,不会产生严重的事故损失,使得π(p1) 5) 风险偏好的影响。前景理论认为人对于收益和损失具有不同的风险偏好,面对收益时表现为风险厌恶,面对损失时表现出风险偏好。施工人员就其行为策略的选择是典型的损失型结果,即使行为成本之差小于安全风险成本与处罚损失,施工人员也会因风险偏好和侥幸心理,宁可承担不确定的损失也不愿意支付确定的安全行为成本,导致安全行为策略难以稳定。 仅通过对条件的求导无法得到选择强度和从众心理效用对建筑行业施工人员安全行为演化稳定策略的影响,因此本文采用Matlab软件对建筑行业施工人员的行为选择策略进行数值仿真分析,研究选择强度和从众心理效用对施工人员行为演化策略的影响,并选取部分参数对上节求导的结果进行验证。施工人员行为策略的稳定性体现在以下两个方面:一是能否抵抗其他行为策略的入侵;二是是否会被其他行为策略取代。本文采用安全行为收益与不安全行为收益的比值Ki来反映安全行为策略抵抗入侵的能力,Ki=πX(i)/πY(i),其中i表示选择安全行为人员的数量,当Ki>1时则表示安全行为策略无法被取代;采用行为演化率r(r=Np)来反映行为策略的扎根情况,行为策略扎根意味着无法被其他行为策略取代,当r>1时则表示行为策略可以扎根,p>1/N,当r<1时则表示行为策略不能扎根,p<1/N。在满足上文博弈假设的前提下,对各项参数值进行如下设置:弱选择情况下的β值为0.05;初始情况下的t=0;C1=3;F=1.5。为了方便后续分析,令:a=I-C1+R=7;b=I-C1+R-k2L=6;c=I-C2+R1-F-k1L=6.5;d=I-C2+R1-F-L=5.5. 选择强度因子β以及从众心理效用因子t不会改变行为策略的实际收益,但可能会影响行为策略的扎根。不同选择强度因子β下行为演化率(rX、rY)随施工人员数量的变化曲线如图1、图2所示。 图1 不同选择强度因子下行为演化率rX随施工人员 数量的变化曲线Fig.1 Variation curves of behaviour evolution rate rX with the number of constructors under different selection intensity factors 图2 不同选择强度因子下行为演化率rY随施工人员 数量的变化曲线Fig.2 Variation curves of behaviour evolution rate rY with the number of constructors under different selection intensity factors 由图1和图2可知:rX随着N的增大而增大,rY随着N的增大而减小;仅在N值很小时,有rY>1>rX,不安全行为可以扎根,但随着N值的增加,变为rX>1>rY,安全行为策略将始终扎根;随着选择强度因子β的增加,安全行为扎根的速率随之增大,因此如果弱选择下安全行为可以扎根,那么强选择下该行为必然扎根。 考虑选择强度因子对行为策略扎根的影响,在弱选择下研究从众心理效用因子t对行为策略选择的影响,不同从众心理效用因子下行为演化率随施工人员数量的变化曲线,如图3所示。 图3 不同从众心理效用因子下行为演化率随施工人员 数量的变化曲线Fig.3 Variation curves of behaviour evolution rate with the number of constructors under different conformity psychological factors 由图3可知:一方面,增大从众心理的影响可以改变行为扎根的速率,但不会影响到安全行为策略的稳定,安全行为策略的稳定仅与行为策略收益相关;另一方面,从众心理可以减少策略收敛的时间,对安全行为策略的从众会使其演化过程很快趋于稳定。但在某些情境下,从众心理也可能会影响行为策略的收益,尤其是在建筑行业,其往往是以班组和群体为单位进行施工,如果群体中的大多数人都选择不安全行为,选择安全行为的个体会因为受到来自群体的冷落、排挤等,导致其收益减少,转而选择不安全行为,进而影响到上述求解出的4个条件的实现。因此,要积极纠正建筑施工人员中不良的安全风气与习惯,努力营造良好的安全氛围,这对于建筑现场施工人员选择安全行为具有重大意义。 在弱选择下验证安全行为成本C1和惩罚力度F对行为演化稳定策略的影响。不同安全行为成本下行为收益比(K)和行为演化率(r)随施工人员数量(N)的变化曲线,如图4和图5所示。 图4 不同安全行为成本下行为收益比随施工人员 数量的变化曲线Fig.4 Variation curves of behavioral income with the number of constructors under different safety behavior costs 图5 不同安全行为成本下行为演化率随施工人员 数量的变化曲线Fig.5 Variation curves of behaviour evolution rate with the number of constructors under different safety behavior costs 由图4和图5可知:随着安全行为成本的增加,安全行为与不安全行为收益的比值K1和KN-1均有所减少,安全行为抵抗不安全行为入侵以及安全行为入侵不安全行为的能力也随之减弱,同时安全行为演化率rX减小,不安全行为演化率rY增加,但尚未影响到安全行为的扎根,此时系统仍能维持最佳的安全状态——仅有安全行为一个演化稳定策略,如C1=1曲线所示;当安全行为成本上升超过系统临界点时,不安全行为入侵并取代安全行为,建筑施工人员均选择不安全行为,此时仅有不安全行为一个演化稳定策略,施工现场安全程度降到最低,如C1=5曲线所示。因此需要控制施工人员的安全行为成本,以此来保障建筑施工现场的安全。 不同惩罚力度F下行为收益比(K)和行为演化率(r)随施工人员数量的变化曲线,如图6和图7所示。 图6 不同惩罚力度下行为收益比随施工人员数量 的变化曲线Fig.6 Variation curves of behavioral benefit ratio with the number of constructors under different punishment intensity 由图6和图7可知:随着惩罚力度的加大,安全行为与不安全行为收益的比值K1和KN-1均有所增加,安全行为抵抗不安全行为入侵以及安全行为入侵不安全行为的能力也随之增加,同时安全行为演化率rX增大,不安全行为演化率rY减小,但不安全行为依旧扎根,此时系统仅有不安全行为一个演化稳定策略,如F=0曲线所示;当惩罚力度上升超过系统临界点时,安全行为逐步入侵并取代不安全行为,系统实现新的平衡,此时仅有安全行为一个演化稳定策略,建筑施工现场安全程度达到最佳,如F=3曲线所示。可见,惩罚力度的大小对系统的安全状态具有重要的作用。 同理,可以对博弈求解出的其他参数作用下的结果进行验证,确定其对行为演化稳定策略的影响。 为了得到更真实的建筑行业施工人员安全行为演化博弈结果,本文引入了前景理论,采用期望感知收益代替期望收益,基于Moran过程构建了建筑行业施工人员安全行为的随机演化博弈分析模型,分析了不同选择强度下施工人员行为选择策略以及演化动态,得出以下结论: 1) 改进了收益矩阵。传统的演化博弈和随机演化博弈方法使用收益矩阵来分析博弈问题,未能很好地贯彻有限理性的假设。本文通过引入前景理论,用收益感知矩阵替代收益矩阵,可以妥善解决感知收益与实际收益存在偏差的问题。而过度自信、风险偏好等的存在,也可以很好地解释博弈求解出的条件在现实中难以实现的原因。 2) 基于Moran过程提出了一种新的行为策略选择更新机制。行为演化博弈的核心是基于博弈者对他人行为策略的模仿与学习,个体对他人行为策略的模仿除了与行为策略的收益有关外,从众心理也是其重要的影响因素,将从众心理效用的影响纳入Moran过程的更新规则中,更符合建筑行业施工人员行为决策的特点。 3) 通过分析强、弱选择下建筑行业施工人员的行为决策,得到了使建筑施工现场具有最佳安全状态需要满足的4个条件,此时安全行为成为系统唯一的演化稳定策略。通过求导的方式得到安全奖励、安全行为成本等因素与条件间的关联,并运用数值模拟方法对部分参数作用下的结果进行了验证,结果表明这些关键因素的变化会影响条件的实现进而改变施工现场的安全状态。 4) 确定了从众心理效用在建筑行业施工人员行为决策过程中的作用。Matlab软件的仿真结果表明:从众心理的效用不会影响行为演化稳定策略的稳定,但可以缩减行为策略收敛至稳定的时间;此外,从众心理也可能导致群体对个体的排斥,因此可以通过纠正建筑行业施工人员中不良的安全风气与习惯,努力营造良好的安全氛围,从而避免对不安全行为的从众而产生的不良影响。
2 频率相依的Moran过程
3 不同选择强度下施工人员的行为演化动态分析
3.1 期望收益主导下施工人员的行为演化动态分析

3.2 随机因素主导下施工人员的行为演化动态分析


3.3 结果讨论
4 数值仿真与结果验证
4.1 部分参数作用下模拟仿真分析

4.2 部分参数作用下结果验证


5 结 论
猜你喜欢
今日农业(2020年20期)2020-12-15 15:53:19上海建材(2019年6期)2019-08-13 06:49:34中国现当代社会文化访谈录(2016年0期)2016-09-26 08:46:25陕西画报(2016年1期)2016-08-02 03:58:38金色年华(2016年1期)2016-02-28 01:38:19中国艺术时空(2015年5期)2015-12-10 02:09:12IT时代周刊(2015年8期)2015-11-11 05:50:38中国建设信息化(2015年4期)2015-09-14 03:01:50中国建设信息化(2015年4期)2015-09-14 03:01:48土木建筑工程信息技术(2013年4期)2013-10-17 02:27:50