谐振式加速度计闭环控制电路非线性振动分析
2023-11-25 13:03赵辉
今日自动化 2023年8期
赵 辉
(中国电子科技集团公司第二十二研究所,河南新乡 453000)
硅微谐振式加速度计通过检测内部谐振器谐振频率的变化来实现加速度的测量,频率信号类似于数字化信号,抗干扰能力强,在传输过程中能保持高稳定性;另外,硅微谐振式加速度计具有体积小、质量轻、成本低、功耗小、可批量生产等优点,在军民领域都有广泛的应用前景[1]。
硅微谐振式加速度计性能主要受到设计方案、加工工艺、加工材料、控制电路等影响。由于谐振频率较高,谐振器在自激振荡过程中出现非线性振动,使系统的固有频率随着振动幅度而改变,且可能存在多个稳态解,在同一激励条件下会产生倍频或者分频响应[2]。一旦自激回路出现多谐波振荡,谐振器固有频率测量精度下降甚至无法正常测量。文章利用锁相环的窄带滤波特性,设计了带有锁相环的谐振式加速度计自激闭环控制系统,消除非线性振荡中的高次谐波,恢复出正常的谐振信号,使整个加速度计正常工作。
1 谐振式加速度计谐波抑制原理
1.1 工作原理
谐振式加速度计核心部件是一对双端固定的谐振梁。当有加速度作用于系统时,质量块将惯性力施加于两个对称的谐振梁,其中一个谐振梁受到轴向拉力,固有频率增大;同时,另外一个谐振梁受到轴向压力,固有频率减小[3]。这样两个谐振梁构成差分结构,通过外围电路检测两者固有频率变化差,就可以计算出被测加速度值。谐振器通过自激闭环控制电路,工作于谐振状态,方便信号提取检测。
1.2 谐振器非线性动力学方程
谐振器的等效数学模型可以视为二阶弹簧——阻尼系统[4],二阶系统模型为:
式中,x为谐振梁相对位移,ξ为系统的阻尼比,w0为谐振器的固有频率,F为外加驱动信号,m为谐振器质量。
根据式(2),当驱动信号频率w等于谐振器固有频率w0时,振动位移幅度最大,并且振动位移和驱动信号之间存在90°相位差。其中,A代表驱动信号的振幅大小,x(t)代表谐振梁相对位移-时间函数,φ为驱动信号相位。
谐振器的非线性振动模型为:
式中,δ为三次方非线性系数。
式中,B1、B2是常数,其值完全由系统参数决定。
可见,由于非线性误差的存在,一旦自激振荡系统中出现3次谐波,系统将发生亚谐波共振,回路信号混有谐波分量后导致测量精度降低。
1.3 谐振式加速度计闭环控制电路
谐振式加速度计自激闭环控制电路主要有接口电路、幅度控制电路、相位控制电路构成。接口电路利用C/V 转换电路将梳齿的电容变化转化为电压,然后对已转化为电压的差动电容信号进一步放大。相位控制电路利用90°移相电路控制环路的整体相移。移相后的信号分为两路:一路进行整流积分来控制驱动信号幅度;另一路经过锁相环来跟踪谐振器的谐振频率。最后将两路分开控制的信号通过乘法器相乘,再经过耦合电路形成谐振器所需要的驱动信号反馈到谐振器。在闭环回路中加入了锁相环,滤除系统中产生的谐波干扰信号,能够锁定跟踪加速度计的谐振频率。
2 锁相环滤除谐波原理
锁相环是一种频率控制电路,能够使输出信号频率锁定在输入信号频率上,具有窄带滤波的特性,并且控制输入、输出信号的相位差恒定。如图1所示,鉴相器、低通滤波器、压控振荡器共同构成锁相环系统。

图1 锁相环原理
式(6)施加到压控振荡器上,控制压控振荡器输出信号的频率为:
式中,wr为压控振荡器在输入电压为0时输出信号的频率,即中心频率;k0为压控振荡器增益,实际上为压控振荡器的灵敏度。
可见,压控振荡器的输出信号频率完全由输入电压控制。由式(6)可见,只要输出信号的频率和输入信号基波频率不相同,即压控振荡器的控制电压就会一直波动,锁相环会不断的调整其输出频率向输入信号频率靠近,直至两者相同,控制电压稳定下来,控制锁相环输出信号的频率和输入信号频率相同。
3 仿真与实验
3.1 Matlab仿真分析
建立谐振式加速度计自激振荡回路的Simulink仿真模型如图2所示。其中,谐振器的模型根据式(3)建立,Gain1和Gain2分别是表示C/V 转换、仪表放大增益。力矩器反映了梳齿静电驱动物理模型,将驱动电压转化为静电力,Gain 代表力矩器增益。Gain3是对调制信号的匹配增益,Gain4是闭环回路的补偿增益。幅度控制环节首先利用绝对值运算对输入信号进行全波整流,然后经过低通滤波器提取出信号的幅度信息,最后利用PI 控制器实现幅度自动增益控制。利用精密移相器(phase change)产生90°移相使整个回路满足自激振荡的相位条件。将一个频率为固有频率2倍频的正弦信号调制到闭环驱动回路中,用来模拟非线性系统高频激励信号,其含有系统固有频率的3倍频信号,符合激励条件。
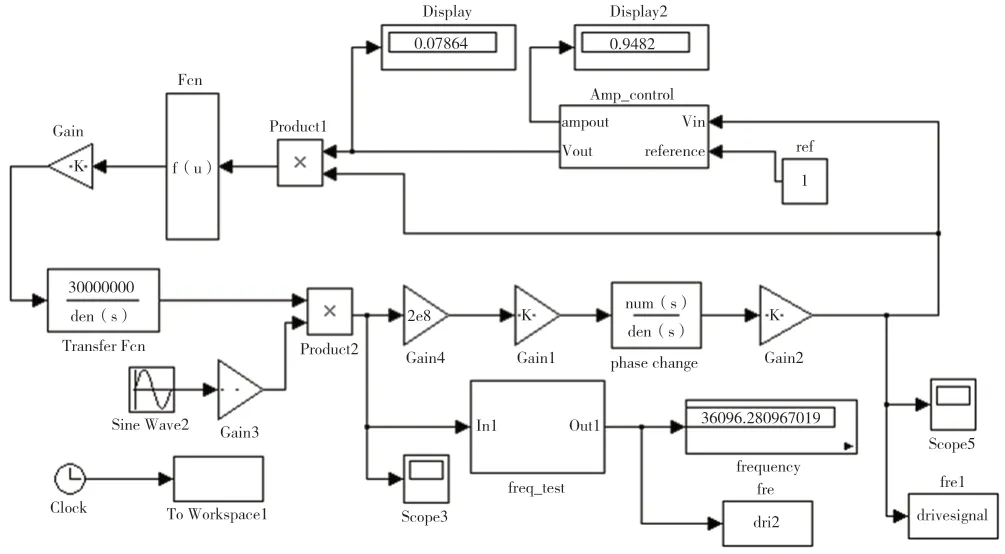
图2 非线性自激振荡仿真
仿真结果如图3所示。由图可见,驱动信号为3次谐波与基波叠加的信号,驱动频率不断跳跃不稳定,无法准确测出,加速度计无法工作,并且自激振荡回路本身无法消除高次谐波。

图3 自激闭环非线性振荡仿真结果
自激闭环电路无法消除谐波共振现象,为了避免这种不利影响,在电路中加入锁相环,利用其窄带滤波特性将高次谐波滤除,恢复正常的谐振信号。建立非线性振荡锁相环闭环控制仿真原理图,如图4所示。由于锁相环自身具有90°移相功能,故锁相环仿真回路中没有移相器。锁相环控制仿真结果如图5所示。调制信号经过锁相环滤波之后变成正常的驱动信号,驱动频率快速趋于稳定,不会反复跳动,频率测量结果显示驱动信号的谐振频率能够正常测量出来。

图4 锁相环控制非线性系统仿真
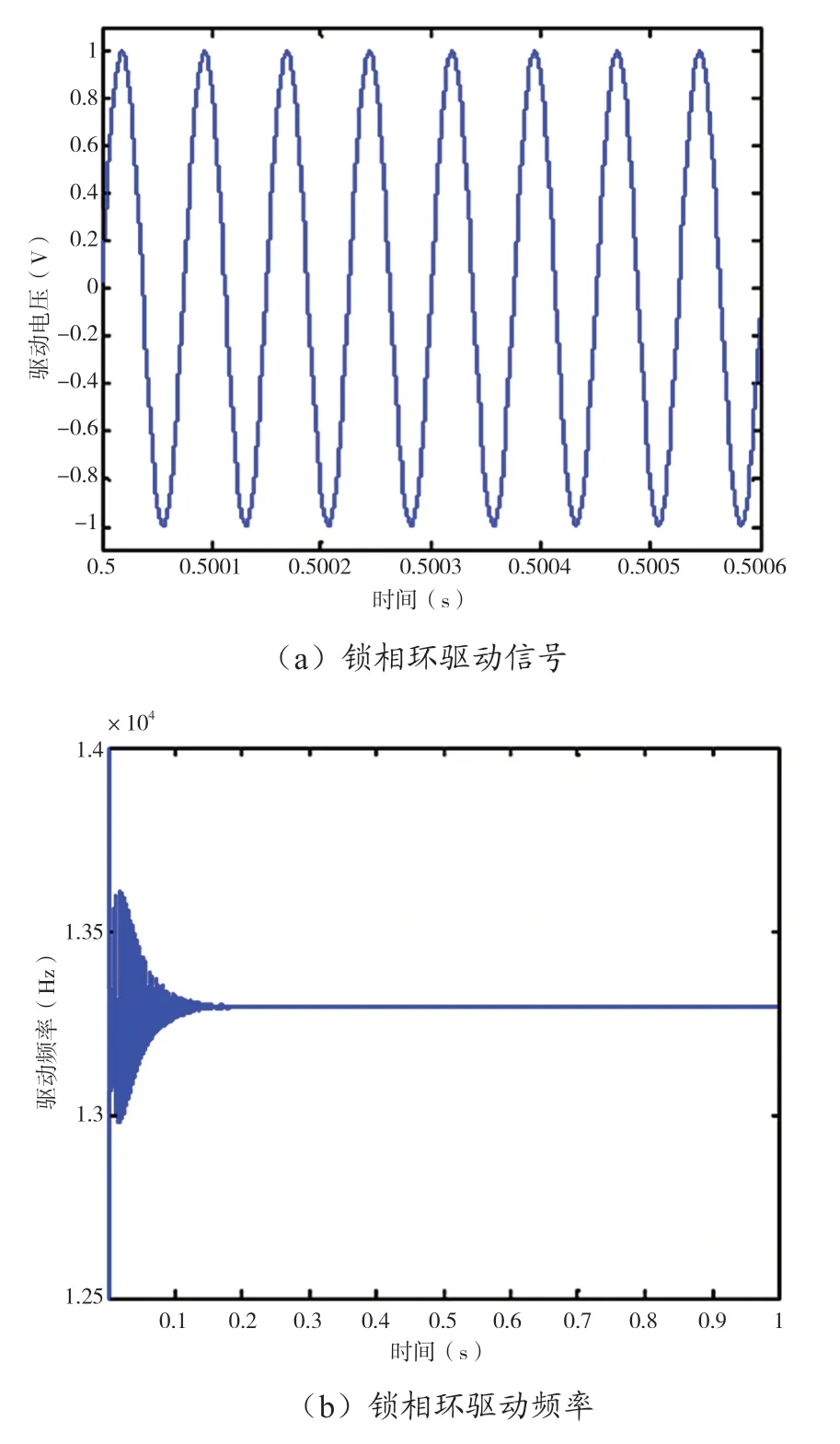
图5 锁相环回路非线性振荡仿真结果
3.2 实验
文章设计了带有锁相环的谐振式加速度计自激闭环控制电路,并进行了实测。利用模拟示波器对电路板上的关键信号进行提取,对采集到的锁相环前后的驱动信号进行对比。通过对比可以看出,含有谐波分量的检测信号经过锁相环之后,恢复成单一频率的交流信号,频率便可以精确测量出来,验证了仿真结果。
4 结束语
对比加入锁相环和不加入锁相环的仿真结果,表明利用锁相环能够解决谐振式加速度计闭环控制回路中非线性振荡现象,滤除驱动信号中的高次谐波,使加速度计正常工作。通过对实际电路调试过程中采集到的波形进行分析,验证了理论仿真结果。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
中国特种设备安全(2021年5期)2021-11-06
电子测试(2018年14期)2018-09-26
传感器与微系统(2018年7期)2018-08-29
电子制作(2018年14期)2018-08-21
电子制作(2018年1期)2018-04-04
电测与仪表(2017年24期)2017-12-19
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
电测与仪表(2015年9期)2015-04-09