自动驾驶交通违法驾驶人的行政归责二分论
2023-11-24 03:57:46黄信瑜孔秋石
蚌埠学院学报 2023年6期
黄信瑜,孔秋石
(安徽财经大学 法学院,安徽 蚌埠 233030)
智能网联汽车制造被视为现代工业“弯道超车”的手段。我国力图把握智能网联汽车带来的交通革命与产业升级契机,除了在研发新型汽车的技术方面处于世界前列,同时也在逐步推进有关智能汽车的立法,例如在2023年召开的“两会”上,以小鹏汽车董事长、CEO何小鹏牵头提起了大量有利于智能汽车落地的立法建议[1],我国自然资源部也于2023年3月发布《智能汽车基础地图标准体系建设指南(2023版)》,明确到2025年初步构建我国自动驾驶的地图标准,2030年构建成熟的自动驾驶地图标准[2]。不可否认的是,未来社会里自动驾驶潮流的到来是不可阻挡的,顺风张帆才能与时俱进,立法者也应当为此做好充分的准备。
1 自动驾驶的行政责任
1.1 自动驾驶法定等级
世界上最早对自动驾驶汽车进行分类的国家是美国,美国高速公路交通安全管理局(National Highway Traffic Safety Administration,简称NHTSA)将自动驾驶汽车根据人工智能自我操纵在汽车驾驶中的占比由小到大逐次分为五个不同的等级,分别以L0、L1、L2、L3、L4对应无自动驾驶、具有特定功能性的自动驾驶、具有复合功能性的自动驾驶、具有限制条件的自动驾驶、完全自动驾驶五种模式。与此相对,国际自动工程师协会(Society of Automotive Engineers,简称SAE)规定了对于自身的自动驾驶等级,分别以L0、L1、L2、L3、L4、L5来对应无自动化、驾驶辅助、部分自动化、有条件自动化、高度自动化、完全自动化六种模式[3]。我国国家市场监督管理总局、国家标准化管理委员会于2021年8月20日批准发布了《汽车驾驶自动化分级》⑴,将1级驾驶自动化称为部分驾驶辅助、2级驾驶自动化称为组合驾驶辅助、3级驾驶自动化称为有条件自动驾驶、4级驾驶自动化称为高度自动驾驶、5级驾驶自动化称为完全自动驾驶。
综上,NHTSA、SAE和我国之间的技术分级相比见表1。
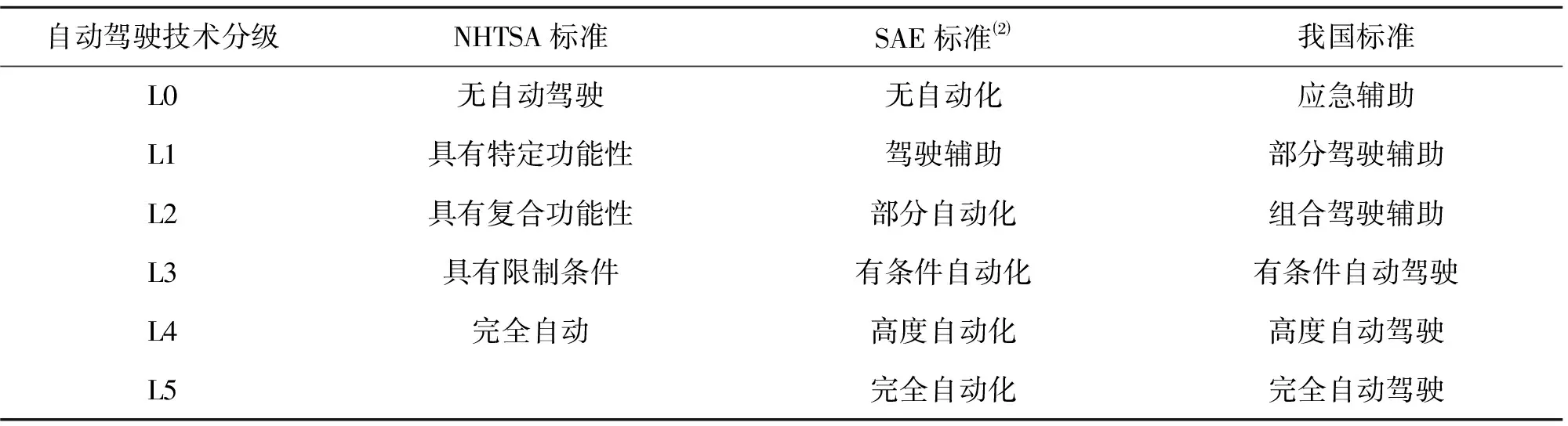
表1 自动驾驶等级划分
由表1可得,对于SAE和我国的自动化驾驶分级的界定标准虽然存在细微不同,但整体上并未有实质性的差别(仅体现在我国对于L0级别赋予了新的内涵,要求车辆系统提供报警、辅助或者短暂介入辅助)[4]。对于L0级到L1级都赋予了驾驶员操纵义务、驾驶接管能力检测和风险减缓策略要求,即仍需要由驾驶员操纵方向盘对车辆进行控制,人工智能仅仅履行提醒、方向纠正等辅助功能;L2、L3级别虽然允许驾驶员暂时脱离方向盘、油门和制动装置,但驾驶员仍具有高度的警示和接管义务,通常将此阶段称为“辅助驾驶”;而到达L4级、L5级,则是真正意义上的“自动驾驶”,通常将其称为“全自动驾驶”,指在限定道路的环境内行驶全程无需驾驶员介入汽车操控,甚至汽车无需安装油门、方向盘等操纵设备。
1.2 行政处罚责任主义向自动驾驶领域的扩张
自1996年我国颁布第一部《中华人民共和国行政处罚法》以来,业界主要秉持客观归责主义和责任主义两种观点。早期主张客观归责主义的学者认为,因为行政违法危害较小、责任只归于违法者一方的特征,因此对于数量大、任务重、涉及面广的行政处罚只采用客观归责,不仅可以满足追责的需求,也可以保证行政效率的要求[5];也有的学者认为,对于行政责任的追究不强调对违法者不法意志的谴责和道德非难,而是注重如何迅速恢复已经被破坏的行政管理秩序,以及制止违法者重新违法,因此在行政责任构成中无需以主观状态为必要要件,而强调违反行政法义务,破坏行政管理秩序的行为[6]。随着我国行政法理论的发展,如今责任主义逐步成为了行政法归责的主流。例如章剑生主张,对于刑事主观要件的归责可以适用于行政违法行为的认定,其一是以行政相对人主张“罪过”是否存在将其认定为行政违法行为要件之一,可以提升行政相对人对于行政处罚的可接受性;其二是以行政相对人主观“罪过”是否存在作为认定要件可以收缩行政机关在认定行政相对人是否行政违法的裁量权;其三,以主观作为认定行政违法要件之一,符合我国现行行政理论发展的趋势[7]。王贵松教授主张,行政法实行责任主义是对于我国宪法中公民人格尊严的一个呼应;其次贯彻责任主义也未必会对我国的执法效率造成影响[8]。熊樟林指出,在整个应当受到行政处罚行为的判定中,有责性应当是最后一项判定的任务,其作用是在客观归责的基础上,赋予更加尊重个人的评价[9]。2021年我国最新的《中华人民共和国行政处罚法》从立法上回应了行政处罚归责原则顺应现实需要,赋予了行政相对人对于行政违法行为主观无责的可能性⑶。
顾名思义,自动驾驶的交通行政责任是指在汽车进入自动驾驶的模式下因违反行政法规定而产生的相应责任。对于行政处罚责任主义归责,仍应就形态多样的行政处罚进一步做出细化。出于与特别法之间的协调关系,也应当逐步在特别法中就责任主义做出一定的扩张,特别是在立法趋势愈演愈烈的人工智能领域。因此,有必要在自动驾驶领域对此做出一定的探索,以及时完成后续的立法。
2 自动驾驶下交通违法的归责困境
2.1 交通行为主体
我国现行的《道路交通安全法》明确规定了驾驶机动车产生交通违法的归责主体以机动车驾驶人为主⑷,而在自动驾驶模式下,鉴于由有自动驾驶系统进行路线规划、环境感知、协助驾驶员进行驾驶甚至单独主导驾驶的因素,传统“驾驶员”的角色类型发生了改变。对于自动驾驶中的人类在法律上如何进行界定,在交通违法中的行政相对主体是以人类作为立法主体还是以AI系统作为立法主体是交通法首先需要考虑的问题。目前世界上对于自动驾驶的立法模式主要是以人类驾驶员作为驾驶人和汽车生产商、供应商作为驾驶人两种模式为主。
首先,以人类驾驶员作为驾驶人模式。以人类驾驶员作为驾驶人的模式来自于2017年经德国联邦议院和参议院通过的《<道路交通法>第八次修正案》,规定了汽车的驾驶员的法律概念包括“启动本法定义的高度或者完全自动驾驶模式并利用其控制汽车行驶的人,即使其在此模式下并未亲自驾驶车辆”⑸。赋予了对于汽车驾驶人在高度或者完全自动驾驶模式(L4级或L5级)可以不亲自操作的权利⑹,但在高度或者完全自动驾驶模式下应当承担警觉和接管义务⑺。警觉义务是指在不亲自进行驾驶的期间,必须保持警觉,以便在特殊情况下能够及时履行一定的接管义务。接管义务是指当高度或者完全自动驾驶模式下当驾驶者个人或者AI系统判断当不存在高度或者完全自动驾驶的所预设的客观条件和外部环境时,应当及时切换成传统的人类驾驶员的操作模式。
由此可见,德国对于SAE模式下的L1、L2、L3模式沿用传统的交通驾驶违法条文,排除了AI系统在行驶中的介入因素;对于L4、L5两个模式,是以人类驾驶员为法律主体立法,通过新增人类驾驶员新的义务而创设人类驾驶员在交通事故中的过错,从而实现行政处罚。此举排除了欧盟学界的主流意见,未采纳《就机器人民事法律规则向欧盟委员会的立法建议(2015/2103(INL)》赋予具有自主性和深度学习能力的最复杂智能机器人“电子人格”法律责任主体和法律地位的倡议[10]。
其次,以汽车供应商作为驾驶人模式。将非人类驾驶员作为自动驾驶汽车驾驶人源自于美国联邦交通管理局,在对谷歌的无人驾驶汽车计划的问询中美国联邦交通管理局答复声称,可以将其设计的自动系统作为驾驶员,主张其设计的汽车将不具有传统历史意义上的人类驾驶员[11]。美国《车辆自动驾驶操作法案》建议将自动驾驶的运营商和生产商定义为车辆在自动驾驶下的“驾驶人”,该操作法案承认了有资格的实体可以向州申请成为特定自动驾驶车辆法律意义上“驾驶人”的权利⑻,这一法案将自动驾驶的供应商作为汽车驾驶人的构想颇具创见。Bryantn Walker Smith教授认为驾驶不应当局限于传统交通法概念上的理解,即仅仅是从驾驶座位上对车辆进行操纵或者对于车辆物理移动进行控制支配,而是可以包括远程自动驾驶算法的智能操作[12]。美国学者Tracy Hresko Pearl认为,让人类“操作员”对自动驾驶汽车的行为承担责任是极其困难的,其认为至少有两个原因:第一,行政处罚近似于刑事惩罚的哲学基础(报复、惩罚和恢复),在谷歌汽车这种没有方向盘、油门和刹车踏板全自动驾驶的情况下发生违章行为,人类“操作员”不会也没有机会违反道路交通法的规定,没有任何值得惩罚的基础,“孤立”这种人不会对社会带来任何益处,而且在未来也不会防止这种行为的再次发生,该理论也同样适用于L2和L3情况下;第二,要求人类操作者对驾驶汽车承担责任,可能会阻止人们采用自动驾驶的汽车——因为那样往往意味着人们会对他们往往无法掌控的东西承担责任,这对人类社会来说是一个巨大的损失[13]。
实际上,该种模式并未得到美国各州立法上的支持,例如美国内华达州机动车辆部门的自动驾驶汽车法规规定,无论是谁驾驶无人汽车(即打开汽车引擎),都应当被视为“驾驶员”,即使驾驶员在驾驶无人汽车时不在车内。同样在佛罗里达州、加州、俄勒冈州、内华达州、德克萨斯州、纽约州、哥伦比亚特区都有类似的立法。
将自动驾驶供应商规定为自动驾驶车辆驾驶过程中的驾驶人,不仅仅是法律概念或者解释路径改变的问题,更重要的是该概念所带来的交通法上的法律主体地位、交通参与人的行为范围、权利义务分配等一系列的问题。
结合我国颁布的法律法规来看,有理由认为我国采用的是以人类驾驶员作为驾驶人的模式。我国立法机关在2021年4月29日公布的新修改的《道路交通安全法》中,在对自动驾驶驾驶员的立法讨论中并未对“驾驶人”这一法律概念做出性质变动。在同年8月由工业和信息化部、公安部、交通运输部颁布的《智能网联汽车道路测试管理规范(试行)》中明确将经测试主体授权负责测试以及出现紧急状况时对测试车辆实施应急措施的驾驶员定性为“测试驾驶人”⑼。其后在《智能网联汽车道路测试与示范应用管理规范(试行)》(征求意见稿)中,明确将“测试驾驶人”改为“驾驶人”⑽,以与我国《道路交通安全法》衔接。我国自2021年3月21日公布《道路交通安全法》(修订建议稿)中规定了具有自动驾驶功能并且具备人工直接操作模式的汽车开展道路测试或者上道路进行通行时,驾驶员应当具备的监控义务和接管义务⑾,这一规定是对德国道路交通法立法经验的路径依赖[14]。
2.2 两种驾驶交互情境下的交通行为责任
L2、L3等级和L4、L5等级自动驾驶的出现使得我国现有《道路交通法》《道路交通安全法实施条例》等法律文件产生了矛盾和滞后,在L2、L3、L4、L5等级下传统机械时代的“人操纵机械”关系发生了彻底的改变,自动驾驶在单纯的驾驶者“人格”上又附加了“AI人格”,其等级的提升实质上是由“人操纵”向“AI操纵”的逐步过渡,根据定义L0、L1等级情况下汽车驾驶仍是以“人操纵”为主,为传统的人工驾驶模式;至L2、L3情况下,汽车操纵由系统完成,驾驶员需要在紧急状况发生时立刻接管车辆[15],以此发生交通违法行为仍然是以人的主观过错作为主要的行政处罚判定标准,人往往不可避免地要对交通违法行为承担责任,在此两种人格交互情境下对于违法行为的过错组成会存在“人格完全过错”“AI系统和人共同过错”“AI系统完全过错”三种模型;在L4、L5情况下汽车处于完全的“AI系统操纵”的情境下(L4需要在特定条件下,而L5适用于任何条件)发生交通违法行为,会存在“AI系统完全过错”“人格完全过错”两种模型。关于两种驾驶交互模式下的不同过错模型,下文会进行证成。
3 辅助驾驶和全自动驾驶下的二分归责
如前所述,虽然L1、L2、L3(辅助驾驶)和L4、L5(全自动驾驶)都在自动驾驶的范畴内,但从立法视野上探索,很难简单将自动驾驶中两种模式的违法、违章行为置于简单的“自动驾驶”法律概念内,因此有必要在立法区域里将辅助驾驶和全自动驾驶拆解,严格依照行政责任主义对两种模式不同情境处罚原理进行列明。《深圳经济特区智能网联汽车管理条例》(简称《条例》)作为我国的首部关于智能网联汽车管理的地方性法规,对我国的自动驾驶立法空白区域提供了一定程度的创新[16]。《条例》针对不同情况下的智能网联汽车的交通事故做出了责任区分。其中,对于“有驾驶人的智能网联汽车发生交通违法”的情形,规定了由公安机关交通管理部门依法对驾驶人进行处理⑿。此外《条例》在“有驾驶人”的情境下另行规定了“完全自动驾驶”的情境⒀,有理由认为《条例》将“有驾驶人”的情形默认为辅助驾驶情形,并将辅助驾驶(L1、L2、L3)和全自动驾驶(L4、L5)两种行政责任情境上做出了区分。
3.1 对于辅助驾驶行政归责的初步构想
从理论上看,在辅助驾驶情境下,因为人工智能汽车系统的运行路径为“可以在有限的条件下掌控‘自身’(例如定速巡航过程中)”和“在行驶中监控路况情况”,因此在行驶的过程中主要是由人类进行掌舵或履行高度的监管和掌控义务,人工智能汽车AI系统的功能是辅助而不是取代人工的作用力。无论在辅助驾驶过程系统是否对人类驾驶员进行了警示,人类驾驶员在驾驶过程中依然承担着对于车、人、路三方面的警觉义务,即使AI系统未进行警示,但系统未进行警示与违法行为之间不存在因果关系,不会涉及人类驾驶员以外其他因素的责任。然而从现实环境上看,在L2、L3等级下的“脱手行驶”中,辅助驾驶人不是机械,在长时间的自动驾驶过程中不可能随时做好及时接管的准备,在现实人工长时间驾驶过程中都会出现驾驶人反应速度下降、分心甚至昏昏欲睡的情况,更何况是在长时间脱离方向盘、油门和制动装置的自动驾驶过程。因此,应当在“警示形式”和“接管状态”两个锚点之间,判定行政相对人的违法责任。
设想一种模型,“在高速道路上,人工智能汽车L3辅助模式定速巡航下巡航系统损坏,AI系统发出标准警示,驾驶员在明知高速公路最高限速且人工驾驶装置无故障情况而故意或者放任汽车速度超过最高限速15%。”在此模型下,行政相对人在明知情况下尚未履行接管义务,放任人工智能汽车超速,具有完全故意不履行法定义务的主观形态,可以认定其主观过错和传统驾驶中的故意的超速行为无异,为“人格完全过错”,因此可以就行政相对人进行“标准”的行政处罚,适用传统机动车交通违法处罚规则。
第二种模型,“在高速公路上,人工智能汽车L3辅助模式下因定速巡航AI系统非因驾驶员过错即时损坏从而使得智能汽车超出了高速公路限定最高时速的15%,系统非因行政相对人过错未进行任何警示或不充分形式警示从而使得在驾驶座上分心的行政相对人被判定为超速行为,但其却要和故意超速15%的违法者同样判处200元罚款、扣3分的处罚。”需要明确的是,在辅助驾驶情况下即使AI系统未尽警示义务,行政相对人因高度的警觉义务仍然不能自行政责任的体系中脱离,然在AI驾驶系统未进行警示或警示不合理的情况,行政相对人因自身情况未及时进行接管或调整,其交通违法的过错往往要小于传统驾驶下故意或“间接故意”意志下产生超速行为的过错,而却要采用统一的处罚标准,这种情况是与行政处罚的责任主义相违背的。因此在此模型下,该违法行为的责任构成为“AI系统和人共同完全过错”,作为独立人格“智能系统”所产生过错是造成整个事件因果关系重要的一部分甚至部分情况下是主导因素,因此有必要认定辅助驾驶行政相对人的行政法领域内的责任要小于普通的传统违法者。关于此情境,处罚措施有两种可行方式:一是适用从轻或减轻对于交通违法驾驶人行政处罚的措施,但对于主观过错低于标准违法主观状态的情境下是否可以适用《行政处罚法》第三十二条第五款规定的内容,仍然需要另行探讨⒁;二是参照适用《条例》规定的对于自动驾驶模式下交通违法行为人的处罚不适用驾驶人记分的有关规定⒂,限缩该模型下的处罚范围。
第三种模型,“在高速道路上,人工智能汽车L3辅助模式下定速巡航功能非因驾驶员过错即时损坏无法关闭且人工控制装置失灵从而导致车在高速公路上超速狂奔”,实际上这种状况在我国目前已经屡见不鲜[17]。在此情况下,行政相对人驾驶员的人格对于超速行为并不存在逻辑上的因果关系,不存在行政责任主义上的主观过错,为“AI系统完全过错”,行政相对人可以从行政违法的范围内进行行政处罚免责。
根据上述的证成,按照行政责任主义,辅助驾驶领域可以分为“驾驶者承担全责”“驾驶者减轻责任或限缩责任”“驾驶者无责”三种情境,至此便将辅助驾驶下交通违法责任与传统人工交通违法责任甄别开,也体现了传统机动车交通违法处罚规则难以笼统涵盖不同情况下的辅助驾驶交通违法行为,因而有必要按照行政责任主义向辅助驾驶立法领域进行探究。
3.2 对于全自动驾驶行政归责的初步构想
相应的,对于全自动驾驶而言,介于创造L4和L5级自动驾驶的本质目标是智能汽车在运行过程中不需要人的干预或监督,因此全自动驾驶下即使具有监管义务和掌控义务相对于辅助驾驶也是处于较低阶层,并根据全自动驾驶模式汽车的设计(例如谷歌汽车将生产无需装备传统方向盘、油门和制动装置的汽车),可能完全缺乏人类可以控制、影响或推翻车辆自身操作的手段。全自动驾驶的根本目标在于实现人类驾驶员完全从驾驶的束缚中脱离,决定了完全自动驾驶汽车会存在“人在车内但完全不驾驶”和“人不在车内”两种人机交互情境,而作为统一衡量的行政责任,对于一种驾驶模式无法将两种情境来对行政责任进行分离,因此即使存在“人在车内”的自动驾驶情境,也注定了其所产生的警觉义务和接管义务与“人不在车内”情境下所承担的驾驶人义务无异,在全自动驾驶模式下汽车驾驶员即使承担义务也应当与辅助驾驶有所区别。有理由认为全自动驾驶模式下汽车行驶中驾驶员的警觉义务和接管义务对于汽车交通违法行为的产生占比较小甚至可以不作为违法结果的因果溯源,以此证成在全自动驾驶下并不存在“人格完全过错”和“AI系统完全过错”之间的过渡状态,人类驾驶员往往是以无责和全责的状态介入全自动驾驶的追责形态。
全自动驾驶在日常生活中往往会存在以下两种模型:
第一种模型,“在高速公路上,一辆开启L4级别被行政相对人编程去往目的地不载有任何人和货物的汽车因为非车主原因导致AI系统定速巡航功能即时损坏,行政相对人往往不具有得知手段或阻止手段,导致超过规定高速公路最高时速的15%。”在此情况下,行政相对人主观上并不打算发生违法行为,更无力阻止违法行为的发生,若使车主为此承担行政的处罚,从行政责任主义上看显然是不公的行为,因为在此情况下,“AI人格”产生的过错达到了造成违法行为产生的全部,所以有理由将驾驶员从行政责任中脱离出来,而就超速行为向其他相关人(例如汽车供应商等)进行行政处罚。
第二种模型,“在高速公路上,一辆开启L4级别被行政相对人编程去往目的地不载有任何人和货物的汽车因为车主过错导致AI系统定速巡航功能即时损坏,导致超过规定高速公路最高时速的15%。”在此情境下,因为是车主主观过错而导致系统损害,“人格过错”在此违法行为责任构成中起到了主要作用,因为驾驶员没有履行汽车系统的修缮义务从而创设了汽车交通违法的条件,因此其客观行为的违法性与传统驾驶中的故意或“间接故意”违法行为无异,为人格“完全的过错”,可以适用传统机动车交通违法处罚规则。
综上,如今的道路交通安全规则对于自动驾驶下人工智能汽车的适用可能部分情境下是适当的,但在不分任何情境的状态下,统一要行政相对人对没有能力制止的涵盖“AI人格”行为过错承担整体责任,违背我国行政处罚中责任主义原则的要求,也并不能起到教育和惩罚的目的。
从鼓励智能汽车新型工业发展的角度考虑,如今人工智能汽车成本远高于传统的人工驾驶机动车,购买具有一定自动驾驶系统车辆的消费者有理由基于增加的价款而产生一定的信赖利益,然现今的自动驾驶系统仍然是一匹难以完全降伏的“野马”,使得自动驾驶车辆的驾驶员具有相对更高的违法几率,若在立法上对于自动驾驶采用与传统交通法统一的追究责任,要求驾驶员对人工智能AI系统的行为负严格责任,不仅会消磨消费者对人工智能汽车的热情,还会阻遏汽车工业的研发进度。因此,有必要在行政责任领域避免将传统交通违法责任条文笼统地运用于自动驾驶领域。
4 结论
目前,基于人工智能领域的迅速发展以及人民群众对美好生活的需求需要,有必要对自动驾驶领域进行立法上的“抓前端,治未病”,为自动驾驶在我国的普及和研发保驾护航,对自动驾驶汽车所带来的问题要进行深入研究。对于自动驾驶在交通违法方面所产生的行政归责,要牢牢把握人工智能驾驶汽车的技术属性和行政责任主义的归责原则,依照“AI人格”和“驾驶员人格”的过错占比,结合辅助驾驶和全自动驾驶的交互情境情况,对行政责任进行紧密划分的归责,在实现人工智能技术最大化社会价值的前提下进行行政处罚的惩罚和教育,维护公平正义的社会秩序。
注释:
⑴详情请参见国家标准公告2021年第11号文(GB/T 40429-2021)。
⑵SAE自动驾驶标准已经于2021年4月进行了更新,文件引入了远程协助与远程驾驶等概念。远程协助是指在无人驾驶情形下,当自动驾驶系统遇到未知的交通形势而不知如何继续行程或完成驾驶任务时,由在车外的人员向车辆发出指令,协助其继续完成驾驶任务,使得L4、L5级别更具有可操作性。
⑶《中华人民共和国行政处罚法》第三十三条第二款规定:“当事人有证据足以证明没有主观过错的,不予行政处罚。法律、行政法规另有规定的,从其规定。”
⑷《中华人民共和国道路交通法》第九十条的规定:“机动车驾驶人违反道路交通安全法律、法规关于道路通行规定的,处警告或者二十元以上二百元以下罚款。本法另有规定的,依照规定处罚。”
⑸详情请见德国《<道路交通法>第八次修正案》第一A条第三款。
⑹详情请见德国《<道路交通法>第八次修正案》第一B条第一款。
⑺详情请见德国《<道路交通法>第八次修正案》第一B条第二款。
⑻Automated Operation of Vehicles Act,https://www.uniformlaws.org/HigherLogic/System/Download Document File.ashx? Docu-mentFile Key=ff535c03-32e1-7cd8-4f6b-f48a12017c41&forceDialog=0.
⑼详情请见《智能网联汽车道路测试管理规范(试行)》第六条。
⑽详情请见《智能网联汽车道路测试与示范应用管理规范(试行)》(征求意见稿)第七条。
⑾详情请见《道路交通安全法(修订建议稿)》第一百五十万条第二款。
⑿《深圳经济特区智能网联汽车管理条例》第七章第五十一条第一款规定:有驾驶人的智能网联汽车发生道路交通安全违法情形的,由公安机关交通管理部门依法对驾驶人进行处理。
⒀《深圳经济特区智能网联汽车管理条例》第七章第五十一条第二款规定:完全自动驾驶的智能网联汽车在无驾驶人期间发生道路交通安全违法情形的,由公安机关交通管理部门依法对车辆所有人、管理人进行处理。
⒁《行政处罚法》第三十二条规定:“当事人有下列情形之一,应当从轻或者减轻行政处罚:……(五)法律、法规、规章规定其他应当从轻或者减轻行政处罚的。”对于以行为人主观过错主观过错程度作为做出从轻或减轻行政处罚的依据目前在部分司法案例中得到了适用,例如江苏省高级人民法院(2017)苏行终294号“江西九江长途汽车运输集团有限公司运输黑斑侧褶蛙”案,河北省沧州市中级人民法院(2021)冀09行终31号“沧州华通电器配件有限公司行政处罚”案等均将行为人主观过错程度作为从轻或减轻处罚判决的因素。
⒂《深圳经济特区智能网联汽车管理条例》第七章第五十一条第三款规定:依照本条第二款规定处理交通违法,对违法行为人的处罚不适用驾驶人记分的有关规定。
猜你喜欢
江苏安全生产(2022年7期)2022-08-24 02:12:26
法律方法(2022年1期)2022-07-21 09:21:46
水上消防(2022年1期)2022-06-16 08:07:10
江苏安全生产(2022年4期)2022-05-23 13:03:42
工业经济论坛(2020年6期)2020-04-13 00:38:20
今日农业(2019年16期)2019-09-10 08:01:30
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
劳动保护(2018年8期)2018-09-12 01:16:12
汽车与安全(2016年5期)2016-12-01 05:21:58