基于无人机激光雷达的开沟质量检测系统设计与试验
2023-11-22 04:46李和清马立新刘德营
江西农业大学学报 2023年5期
肖 文,李和清,马立新,刘德营*
(1.南京农业大学 工学院,江苏 南京 210031;2.江苏省农业机械鉴定站,江苏 南京 210017)
【研究意义】农田开沟作业在农事活动中扮演着重要角色,沟渠能够有效调节农田内水、肥料和热量的循环,从而改善土壤环境,提升农作物的产量和质量。此外,开沟操作有助于土壤疏松,促进作物根系的生长和发育,提高水分利用效率,并促进肥料的吸收,增强农作物的抗性[1-4]。开沟机成为提高开沟效率不可或缺的农业机械设备,开沟机的开沟质量直接影响农作物的收获和品质。因此,对开沟机作业性能进行评估和鉴定十分必要。【前人研究进展】近年来,国内外学者大多对开沟机的结构和性能进行了相关研究。文献[5]利用太阳能发明了开沟起垄一体机,文献[6]针对无人驾驶的自动起垄开沟的耕作机,文献[7]通过转矩和能量特性优化了开沟机的叶片,文献[8]对仿生圆盘开沟器DEM 和土仓的研究,以及一种立体视觉导向线检测系统被应用于垄沟种植领域,检测自主拖拉机在沟道中自动导航的偏离度,精确定位拖拉机在田间的位置[9]等。对于开沟质量监测的研究,文献[10]选择有限元分析法对开沟机刀具进行动力学仿真,根据优化模型对刀盘材料进行优化,以提高开沟质量,文献[11]以圆盘开沟机刀盘为研究对象,采用DEM-FEA 的方法对刀盘的力学特性进行仿真分析,防止刀盘因受力变形,从而影响开沟质量,文献[12]总结了国外海底犁式开沟机技术进展,对“V”型开沟犁和矩形开沟犁两种海底犁式开沟机的开沟尺寸、形状以及开沟深度和稳定性进行重点研究。随着计算机技术和机器视觉的发展,基于点云的应用也越来越广泛,为测量目标的三维指标提供了很好的解决方向[13-14]。石雪飞等[15]利用三维点云重构技术,检验评价了异形混凝土预制构件尺寸,提出了高精度、自动化异形混凝土预制构件尺寸检验评价方法。张婷等[16]提出一种基于无人机离线三维重建获取牛体点云数据对其实现体尺非接触式测量的方法,实现可使用覆盖面广、精准、高效的牛体尺测量方案。杨建思[17]提出机载和地面激光雷达集成可视化应用于水利施工测量数据、道路施工测量数据和工程设计数据等。以上研究均利用点云数据提取三维参数测量目标的尺寸、周长、体积等数据,在分类评级、姿态、体型估算方面进行研究,表明了三维点云重构技术成为一种有效的立体测量方法。
【本研究切入点】目前对开沟机开沟质量的检测主要依赖于人工测量,造成随机误差大,效率低,如何高效、全面精确评估开沟质量仍然是当前的主要研究课题。由于农田环境的复杂性以及目前农业器械检测手段的单一性,该方面的研究鲜有报道。【拟解决的关键问题】本研究以无人机搭载激光雷达为平台,研发了基于无人机激光雷达的非接触式开沟质量检测系统,为智能化开沟检测装备研发和控制策略制定提供可靠的技术参考和理论基础。
1 材料与方法
1.1 硬件系统
基于无人机激光雷达的开沟质量检测系统硬件设计如图1所示,包括无人机、激光雷达、惯性测量单元、交换机、微型主机。

图1 开沟质量检测硬件系统结构Fig.1 Trenching quality inspection hardware system structure
为了满足无人机有效负载和长航时要求,选择大疆M600 Pro 以确保数据能够完整采集;进一步,考虑到无人机的载重和数据采集精度,选择Velodyne VLP-16 型激光雷达。该款雷达尺寸小,数据捕捉速度为每秒300 000 点,频率为10 Hz,精度为±3 cm,配置16 个激光发射器及一个数据接口盒,通过数据接口盒便于其他设备相连,满足系统测量要求;惯性测量单元由陀螺仪、磁力计和加速度计等组合而成,具有姿态基准系统(AHRS)的9轴模块,能够提供航向角、俯仰角和翻滚角,有助于将激光雷达的帧配准成更加密集的点云;以太网交换机用于扩展移动工作站的物理接口,连接外部设备的通讯;微型主机选择intel i5 处理器,16 G 内存∕256 G 固态,安装Ubuntu16.04 操作系统,用于驱动激光雷达和保存点云数据。系统硬件设计见图2。

图2 系统硬件设计Fig.2 System hardware block diagram
1.2 点云预处理
将传感器在移动中产生的数据转换成单个帧文件,而后通过点云将多个帧文件配准成一个完整的点云数据。在ROS系统下,激光雷达和IMU的数据被分别保存在两个“bag”文件中,通过Rviz Interface可视化“bag”文件,并将“bag”文件转换成“ply∕pcd”格式的帧文件,选择多个点云数据密度较高的帧文件作为点云配准的配准文件,选择点云数量较多的帧文件作为参考点云,其余帧文件依次迭代配准,以得到完整农田点云数据。
为了实现点云数据精确配准,笔者提出了一种基于正态偏差点匹配的配准方法,其具体实现过程如算法1所示。该方法通过比较K邻域的法线和输入点云中与查询点相关的法线的角偏差,来实现点云的配准。首先,使用重心法对参考点云和待配准点云进行初始粗配准。接着,将特征向量配准过程引入后续的迭代中,对每次更新的待配准点坐标先进行主成分配准,然后再进行最近点搜索。这样可以使得参考点云与待配准点云的重合度更高,从而有效提高后续迭代点(iteration closet points,ICP)算法中搜索最近点的精度。最后,通过姿态变换进行对应匹配,完成后续的配准过程。

配准实现过程如图3 所示。选择3 帧点云数据,通过提出正态偏差点匹配的配准算法,得到完整的农田点云数据。首先,将参考点云和待配准点云1配准在同一个坐标系中获取一个点云融合数据。然后将待配准点云2迭代到配准算法中,与点云融合进行配准同一坐标系下的数据。最终可得到配准后完整的沟道点云数据。

图3 点云配准过程Fig.3 Point cloud registration process
1.3 三维重构
为了有效构建沟道三维模型,需对配准后的点云数据进行三维重构[18-20]。本文采用一种基于正向偏差配准的泊松(Poisson)重构算法[21],通过计算具有曲面边界的特征函数来实现泊松曲面构造。由曲面的梯度关系得到采样点与指标函数之间的积分关系,给定一个区域M及其边界∂M,其指标函数χM(x)定义为:
对于任意点p∈∂M,定义为向内的表面法向量,F(q)为一个平滑滤波器,Fp(q)=F(q-p)是F沿p方向的平移。梯度空间的近似如式(2)所示:
其中ςs是离散点集Ω 和∂M被分割的、互不相交的区域,s∈ςs。根据积分关系,计算指标函数梯度场的近似解,形成泊松方程。用矩阵迭代法得到泊松方程的近似解,用移动立方算法提取等值面,以实现三维沟道模型重构。
图4 为本文重构的沟道三维模型,图中的沟面宽表示为沟面两侧的横向距离;沟底宽为沟底两侧的横向距离;沟深为沟面到沟底的垂直距离。
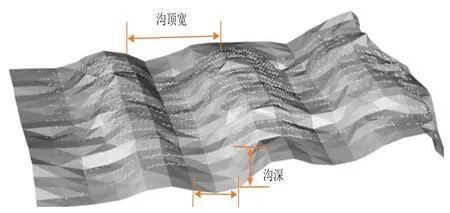
图4 沟道重构模型Fig.4 Trench reconstruction model
1.4 软件设计
基于Visual Studio 2017、Qt5.10、VTK 以及PCL(point cloud library)库设计了开沟机作业质量检测系统,系统界面如图5所示。软件采用模块化的设计,包括:数据文件、数据显示、输入功能、生成校准、数据处理、参数测量和报告输出等7个功能模块。输入功能模块能够输入测试地点、机械类型型号以及厂商并保存在系统中,参数测量模块能够测量指标数据并保存,报告输出模块能将输入功能模块和参数测量模块的相应信息保存在WORD 文件中,直观地显示开沟机作业质量。

图5 系统界面Fig.5 System interface
本次设计的开沟机作业质量检测系统流程图如图6 所示。首先,初始化软件系统,导入数据文件,判断文件格式是否满足要求,在满足格式要求后,可视化文件内容,并曲面重构三维模型;然后,在输入功能模块中输入测试地点、机械类型型号以及厂商;最后进行参数测量,并输出相应报告。

图6 开沟机作业质量检测系统流程Fig.6 Flow chart of operation quality testing system of trenching machine
2 系统验证与结果分析
2.1 试验条件与方法
为了验证本文设计的开沟质量检测系统性能,2022年6月团队于中国江苏省扬州市雅源家庭农场开展试验验证。试验现场分为2×2个区域,每个区域5 m×5 m,每个区域设置为双沟道;开沟机型号为1K-33,设计参数为梯形沟渠、开沟深度20 cm、沟面宽度15 cm、沟底宽度25 cm;无人机飞行高度为2~3 m,飞行速度为1 m∕s。本文所有测试均基于笔记本电脑(操作系统:Windows 10×64,处理器:Intel(R)Xeon(R)E-2176M,CPU 为I5-6300HQ,显卡为GeForce GTX950M)上运行。此外,在点云建模过程中,设置法线搜索半径为20,设置Degree参数为3,保证模型平滑度和耗时短,根据求解2d×2d×2d立方体,树的最大深度设置为8,ISO等值面的提取深度选择8,设置样本点最小数量为3,保证在无噪声的条件下建模平滑,设置解线性方程组Gauss-seidel迭代方法次数为8,由于沟道为梯形沟,设置重构的立方体直径和样本边界立方体直径比例为1.25。人工测量参照《农业机械推广鉴定大纲-开沟机:DG∕T 089—2019》[22]开展相关试验。
2.2 试验结果分析
在无人机飞行高度为2 m 时,人工测量与本文系统建模测量的对比如图7 所示,表1 为现场测量数据,表2为10次数据测量的平均值、均值误差与标准差。

表1 沟道建模与人工测量表Tab.1 Trench reconstruction modeling and manual measurement table

表2 平均值、均值误差与标准差Tab.2 Average value、Average value deviation and standard deviation value
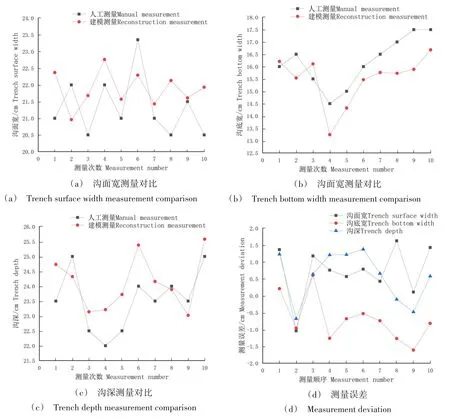
图7 数据测量对比Fig.7 Comparison of data measurements
从图7 和表1 中可以看出,沟面宽的最大误差为7.95%,最小误差为0.51%,平均误差为3.83%。沟底宽的最大误差为9.2%,最小误差为1.31%,平均误差为4.73%。沟深的最大误差为5.75%,最小误差为0.46%,平均误差为2.73%。此外,本系统的时间成本相比于人工测量的时间至少提升了约150%。
表2 中,沟面宽、沟底宽和沟深的人工测量平均值与建模后测量的平均值相接近,均值误差范围在±1 cm 以内,人工测量沟面宽标准差略大于建模测量的标准差,人工测量的沟底宽和沟深的标准差与建模测量的标准差相差不多,表明建模测量值趋近于人工测量值,建模测量的方法可以逐步取代人工测量,在测量误差方面,能够满足中华人民共和国国家标准DGT 089—2019 农业机械推广鉴定大纲-开沟机规定的误差要求,达到开沟机开沟质量高效且精度测量的需求。
3 结论
(1)设计了一套基于无人机激光雷达的开沟质量远程检测系统,能够实现数据远程传输、实时处理、存储和历史数据回溯等功能。
(2)提出了基于正态偏差配准的曲面重构算法,实现对农田沟道的配准,将不同区域的点云数据融合到同一坐标系下,得到完整的点云数据,并用Poisson算法对完整的点云数据进行曲面建模。
(3)通过现场试验验证了对沟面宽、沟底宽和沟深的远程检测,与人工测量结果相比,建模后沟道模型中的沟面宽平均误差为0.723 cm;沟底宽平均误差为-0.705 cm;沟深的平均误差为-0.565 cm,表明该系统具有较好的检测性能,有期为智能化开沟装备研发和控制策略制定提供可靠的技术参考和理论基础。
猜你喜欢
北京测绘(2022年5期)2022-11-22
摄影世界(2022年1期)2022-01-21
汽车观察(2021年8期)2021-09-01
中阿科技论坛(中英文)(2021年2期)2021-03-17
农机化研究(2020年2期)2020-10-17
中国交通信息化(2019年1期)2019-03-26
知识经济·中国直销(2018年12期)2018-12-29
电子制作(2018年16期)2018-09-26
农机化研究(2018年8期)2018-07-10
商周刊(2017年6期)2017-08-22