Chisel构建处理器模型的功能验证方法研究
2023-11-21 12:57:58吴乐宁王淼陈福
西北工业大学学报 2023年5期
吴乐宁, 王淼, 陈福
(1.航空工业西安航空计算技术研究所, 陕西 西安 710076; 2.西北工业大学 计算机学院, 陕西 西安 710072)
近几十年以来,航空计算机技术飞速发展,嵌入式系统由于体积小、可靠性强以及功耗低等优点,被广泛应用于航空电子设备中。然而随着航空嵌入式领域应用程序需求的不断提高以及半导体工艺的快速发展,功能验证已经成为嵌入式系统设计周期中最主要的挑战。为了缩短整个处理器设计完成的总体时间,有必要研究出高速寻找并定位设计错误的验证方法,提高整个验证的速度,这对航空嵌入式处理器设计以及验证具有重大意义。
Chisel[1]是Berkeley大学提出的一种嵌入在Scala[2]中(一种高级汇编语言)的硬件构造语言,使得设计者可以用Scala这种函数式编程语言快速设计硬件,并能转化成Verilog代码用于进一步实现。Chisel语言相比较传统硬件描述语言Verilog的优点主要有:①抽象程度高、高度参数化;②前端设计周期较短;③除了可以生成Verilog,还可以生成C或者CPP;④代码可综合。因此,目前已有一些基于Chisel语言构建的嵌入式处理器[3]。本文采用以ARM9TDMI为目标构建的航空处理器模型ARMChisel进行研究,采用经典的5级流水线设计,支持7种处理器模式及7种中断类型。由于航空处理器模型对于精确控制的高要求使得该处理器模型的数据通路和控制通路非常庞大与复杂。此外,基于Chisel语言的模型验证框架不像基于Verilog和SystemVerilog的验证那样具有系统性,这使得基于Chisel语言构建的处理器模型验证难度和验证周期大大增加。
目前,主要使用基于仿真的验证方法验证嵌入式系统的功能。这种验证方法[4]借助仿真工具通过模拟实际电路的工作环境对处理器系统进行验证,通常要仿真大量的测试得到期望的覆盖率。目前已有一些工作针对嵌入式处理器进行了功能验证。文献[5]提出了一种自动化的覆盖率驱动验证和优化方法,验证了算术逻辑单元和RISC处理器的性能。文献[6]设计了一个混合模型作为参考模型,通过比对两者的输出从而定位待测设计的错误以验证多核处理器。文献[7]基于龙芯2K100B移动智能终端制定了相关的测试方案。文献[8]针对X86处理器阐述了通用的验证环境,并提出了基于寄存器和多级缓存的验证原则。文献[9]基于覆盖率引导的变异模糊测试提出了一种采用最少的设置并利用FPGA加速仿真测试的新方法来解决测试覆盖率问题。然而这些研究都没有面向Chisel语言进行研究,不能为现有基于Chisel语言构建的航空处理器提供功能验证指导。文献[10]基于嵌入式Scala的Chisel语言开发了名为ChiselVerify的高级验证库,为Chisel生态系统带来了功能覆盖率等功能。然而仅仅针对Chisel设计增加了验证库,并没有为整个Chisel设计提供验证方法。
目前对基于新型硬件语言Chisel构建的处理器模型的验证策略研究还比较少。因此,本文提出基于ARMChisel嵌入式处理器模型研究的功能验证加速方法。提出了一个覆盖率感知且支持中断测试的随机指令生成器,可以生成大量高质量测试激励,提升随机验证效率;给出了基于Chisel设计的分阶段验证策略,加快了验证周期,为这一方向的研究提供指导;基于Chisel和Verilog设计搭建测试平台,并成功启动操作系统。
1 覆盖率感知的指令生成器
测试激励的质量高低是影响基于仿真验证的一个重要因素。在讨论随机测试激励的生成之前首先分析被测处理器模型的指令集架构。
1.1 指令集架构分析
如图1所示,ARM指令按指令特点可以分为以下几种[10]:数据处理类指令、存储器访问类指令、乘法类指令、跳转指令、杂项指令、协处理器指令。该嵌入式处理器模型,支持数据处理类指令57条、存储器访问类指令28条、乘法指令、跳转指令和杂项指令共15条以及一些系统级的指令。
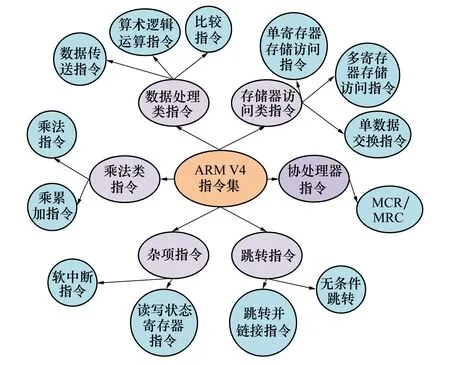
图1 ARM V4指令集指令分类情况
ARM V4指令集支持的指令表示的基本格式为〈opcode〉{s}〈c〉〈Rd〉,〈Rn〉{,〈operand2〉}。
其中,{ }中的项目可以省略,而〈〉中的项目不可省略,opcode是每条指令的指令助记符,不可省略;s是每条指令是否要根据指令执行结果改写状态寄存器的标志;c是每条指令的指令执行条件;Rd一般是目的寄存器,用来存放指令计算得到的值;Rn一般是第一操作数的寄存器或者基址寄存器;operand2一般是第二个操作数,第二个操作数的生成有3种方式:①8位立即数循环移位偶数位;②Rm寄存器的方式;③Rm,shift类的寄存器移位。
随机指令生成器要根据指令集的分类以及编码规则建立它的生成机制。
1.2 随机指令生成器
基于分析得到的生成机制,设计了一个受约束的随机指令生成器,该生成器具备5个功能:①生成的指令符合被测处理器模型的指令集规范,是合法的指令;②支持ARM V4指令集所有的指令;③该生成器对存储结构可控,能控制指令的寻址地址以及跳转地址,以防跳转到非法的存储区域,造成仿真错误;④支持7种处理器运行模式;⑤支持7种中断处理和中断返回。
图2为随机指令生成器结构图。
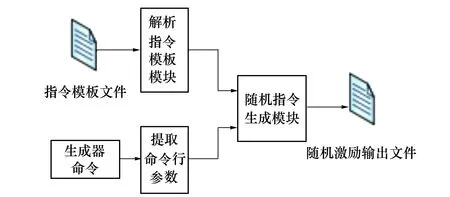
图2 随机指令生成器结构
该随机指令生成器主要由四部分组成:指令模板文件、解析指令模板模块、提取命令行参数模块、随机指令生成模块。解析指令模板模块用于从根据指令集规范提前编辑好的指令模板文件中逐行读取指令信息,按规则提取出各个域信息并将信息存进指令池中。提取命令行参数模块用于从输入的命令中提取出随机指令生成器的约束,其中约束包括:要生成的指令、要生成的指令数量和生成无条件执行指令的概率。然后将约束和指令池的信息作为参数传送给随机指令生成模块,最后随机指令生成模块根据得到的约束生成随机指令序列并写入二进制输出文件中。
1.2.1 指令模板文件
指令模板文件用于提供给随机指令生成模块关于ARM V4指令集的指令编码相关信息,使得指令生成模块可以根据这个文件生成有效合法的指令序列。
指令模板各域的意义为:①insnname表示一个指令类的名称。②cond:4表示ARM V4指令的高4位(条件码),属于可随机生成的域。③fixedvalue表示指令中固定值的部分,属于不可随机生成的域。④randvar:randwidth表示一个宽度为randwidth名为randvar的可随机生成域。⑤constraints表示该指令类的约束内容。比如,一部分指令的目的寄存器不可以为15号寄存器(PC)。⑥memory表示该类指令的寻址模式。
其中可随机生成域和不可随机生成域可根据指令实际情况增删。约束域和存储域若没有可以省略。
1.2.2 随机指令生成模块
随机指令生成模块用于生成随机指令并写入二进制输出文件中。首先读入要生成指令的信息和约束,然后设置好存储器的大小,接着写入中断处理指令序列,最后按照随机数随机到指定数量的指令并写入一个结束指令(一条特定的未定义指令)即可。
针对约束访存地址和异常中断处理功能描述如下:约束访存地址:在随机生成指令之前先分配好存储器的大小以及地址,后面生成访存指令时根据设置的数据存储器大小和地址对随机到的访存地址加以约束,使得访存地址都是有意义的地址。异常中断处理:随机指令生成器生成的指令序列希望发生中断时,能不影响程序正常执行,因此对中断处理进行了简化。生成器在生成指令之前要写入二进制输出文件的简化中断处理程序来支持中断返回。
支持中断测试的处理机制:
0x00000000: BL INST-ADDR;
0x00000004: LDR PC,[PC,#20];
0x00000008: LDR PC,[PC,#16];
0x0000000C: LDR PC,[PC,#16];
0x00000010: LDR PC,[PC,#12];
0x00000014: MOV R0,R0;
0x00000018: LDR PC,[PC,#4];
0x0000001C: LDR PC,[PC,#0];
0x00000020:ANDEQ R0,R0,R8,LSR
0x00000024: ANDEQ R0,R0,IP,LSR
0x00000028: SUBS PC,LR,#0;
0x0000002C: SUBS PC,LR,#4;
其中INST-ADDR为随机指令序列的第一条指令的地址,即发生复位时跳转到第一条指令的地址重新执行。最终会开始执行中断返回指令SUBS PC,LR,#0,该指令将PC值改写为发生中断时的指令的下一条指令地址。其他中断情况下和软中断和未定义指令中断情况类似,唯一不同的是中断处理指令为SUBS PC,LR,#4,该指令将PC值改写为发生中断时的指令地址。
该指令生成器是一个可以根据验证需求配置的高效伪随机指令生成器。使用随机指令生成器可以提高生成测试激励的速度,加速整个验证过程。
2 嵌入式处理器模型的阶段验证
根据被测设计(一个新型构建语言Chisel构建的兼容ARM V4的嵌入式处理器模型ARMChisel)的特点,制定了如图3所示的分阶段验证策略。
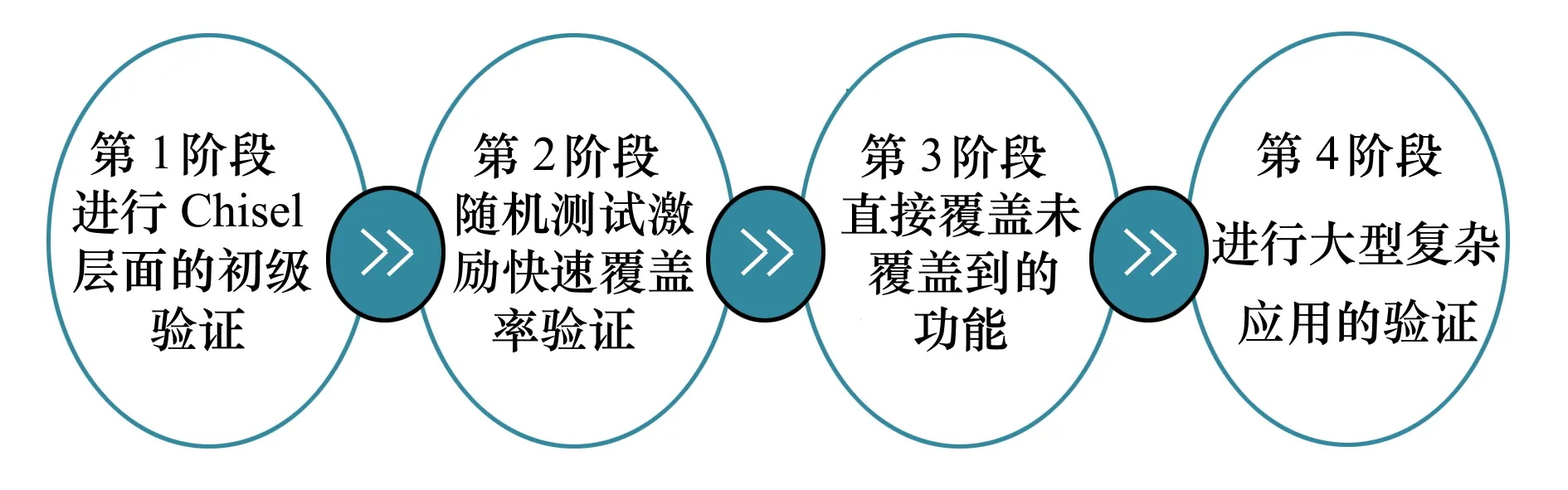
图3 4个验证阶段
2.1 第1阶段:Chisel层面初级验证
在整个验证过程中,由于整个处理器模型的设计均使用Chisel语言构建,因此第1阶段的验证是基于Chisel语言下的验证。之所以设置了Chisel层面的初级验证,而不直接转为Verilog进行验证,是因为由Chisel设计转化为的Verilog设计可读性较差,验证时定位错误后难以修改代码,因此必须在Chisel层面进行初级验证。
Chisel提供的验证库有3种可用的tester[11],分别为PeekPokeTester,SteppedHWIOTTester,OrderedDecouoledHWIOTester。其中PeekPokeTester是最灵活的一个tester,它提供了如表1所示的几个操作用于测试验证,并结合目前的开源Chisel验证库[11]进行第1阶段的功能点验证。
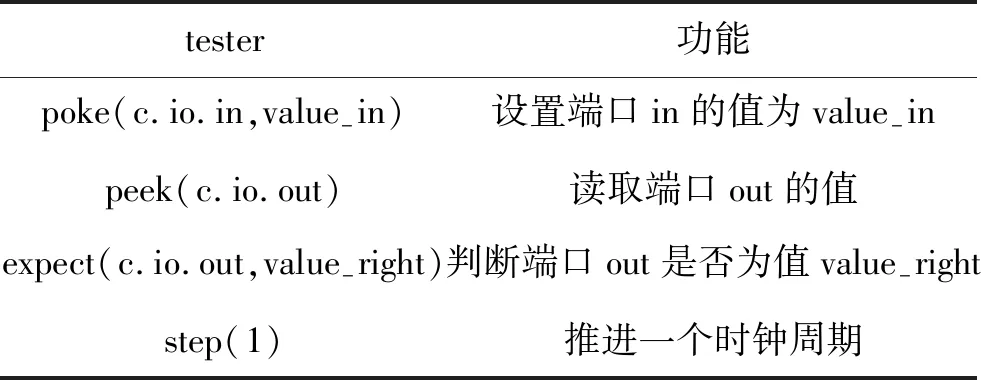
表1 Chisel验证操作
其中,poke()用于设置被测设计输入端口的值,peek()用于从被测设计输出端口读取输出结果,expect()用于判断端口的输出值和特定值是否相等,step()用来推进被测设计的时钟。
第1阶段主要进行简单逻辑以及数据通路、控制通路的验证,充分利用Chisel提供的验证支持,排查出一些逻辑错误。Chisel语言层面进行测试的平台搭建如图4所示。
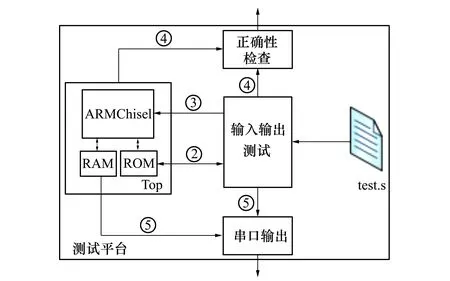
图4 Chisel层面测试平台
测试平台由5个部分组成:Chisel测试类、被测设计、测试激励、串口输出、正确性检查。
首先从测试激励文件test.s读取指令,并把指令写入指令存储器(ROM)中去,然后开始仿真并进行正确性检查以及串口输出。其中采用测试激励自校验和参考模型比较法进行结果正确性检查。为了可见手写应用程序和标准程序集中的输出结果,在Chisel层面的测试平台中模拟串口输出,用于可视化应用程序的验证。
Chisel并没有提供直接的生成覆盖率信息工具,但是可以在构建Chisel的工具SBT中构建指令build.sbt增加用于生成测试覆盖率信息的插件sbt-scoverage获得被测设计的覆盖率。根据需要设置coverageEnabled,coverageMinimum和coverageFailOnMinimum等一系列覆盖率配置参数。调用命令执行即可得到各模块的覆盖率信息。
虽然在Chisel语言层面可以进行一些简单功能验证和代码覆盖率的收集,但是缺乏EDA工具的支持使得大型设计的验证仍然比较困难。因此考虑将被测的嵌入式处理器模型转化为Verilog语言继续进行后续阶段的验证。
2.2 第2阶段:覆盖率快速验证
第2阶段要进行覆盖率快速验证,使用随机指令生成器生成大量的随机测试激励,尽可能覆盖到被测模型的所有功能点,以便快速达到较高的覆盖率。
在验证之前,首先要基于被测设计提取出功能点。对于被测模型ARMChisel,共提取出135个功能点,其中单条指令功能点100条,组合指令功能点13条,特殊情况功能点22条。
这一阶段需要借助EDA工具提供的一些功能,因此搭建基于Verilog语言的测试平台,如图5所示。测试平台由五部分组成:被测处理器模型、测试激励、正确性检查、覆盖率检查和串口输出。
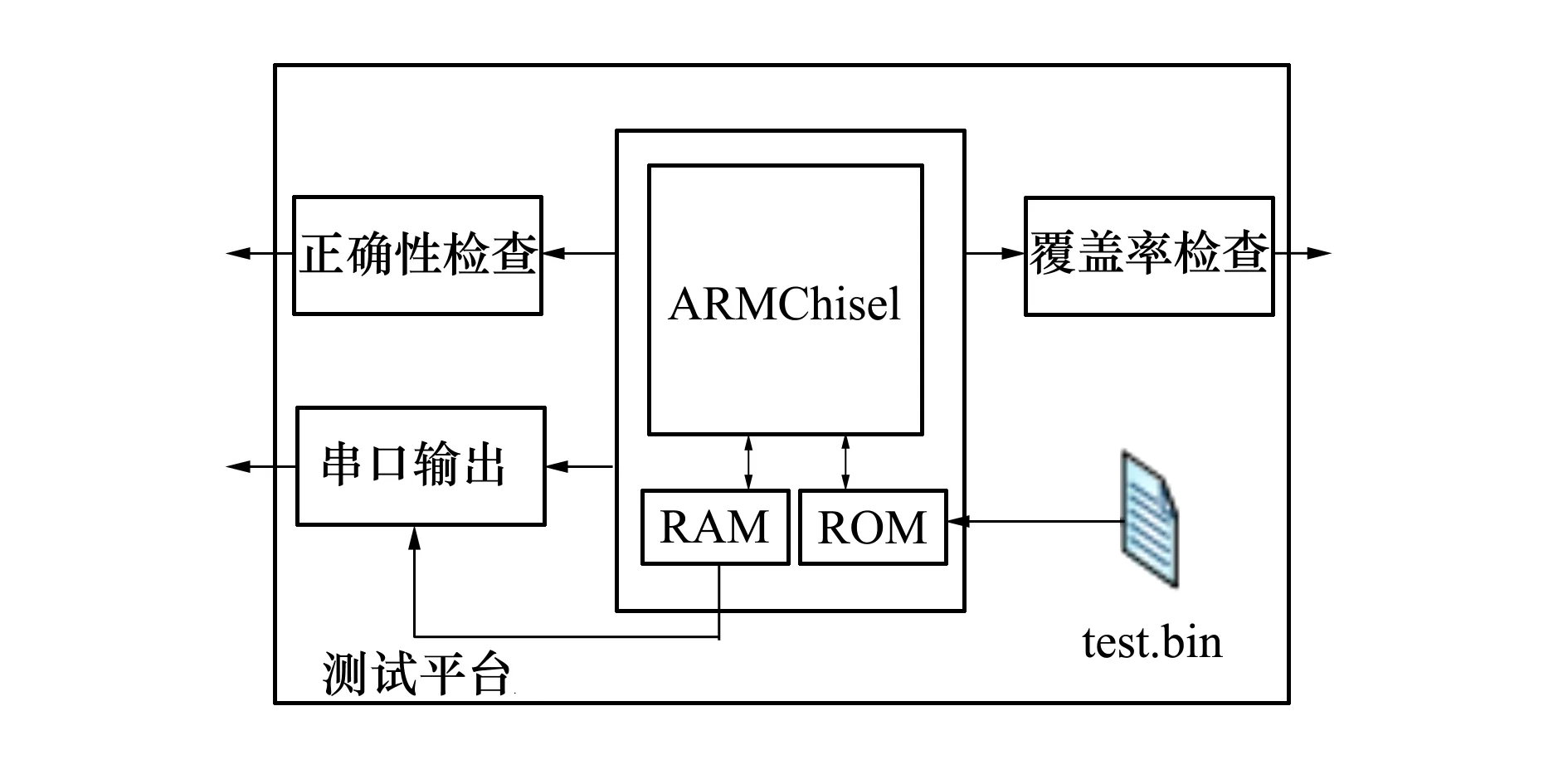
图5 Verilog层面测试平台
首先从测试激励文件(test.bin)中读指令到指令存储器(ROM)中,然后开始仿真验证被测设计。在验证过程中,会进行执行结果正确性检查和覆盖率检查,可以快速地发现错误并定位错误。其中采用测试激励自校验法和参考模型比较法来进行结果正确性检查,采用代码和功能双覆盖率来进行覆盖率检查。在Verilog层面的测试平台中也增加了串口输出的模块,用于可视化应用程序的验证。
2.3 第3阶段:直接测试验证
第3个阶段验证的目标是使整个设计的功能覆盖率达到100%,包括一些边界情况和特殊情况,该阶段的验证步骤为:
1) 在前2个阶段验证的前提下,会得到一个较高的功能覆盖率报告,分析该报告得到功能覆盖率的覆盖情况;
2) 将未覆盖功能点全部罗列出来,然后针对这些功能点,生成特定测试激励,一般1个功能点1个测试激励;
3) 仿真运行这些直接测试激励或者随机测试激励,得到新的覆盖率报告;
4) 分析得到的新覆盖率报告,查看是否达到100%的覆盖率,如果达到了期望覆盖率则本阶段验证结束,进入第4个阶段的验证。如果没有达到期望覆盖率则继续执行步骤1)~4),直到达到期望的覆盖率。
在本阶段,对于一些可使用带约束的随机指令生成器生成的测试激励验证的功能点,可以用随机指令生成器来快速生成测试激励。
2.4 第4阶段:复杂应用程序验证
通过前3个阶段的验证,行覆盖率以及功能覆盖率均达到了100%,这意味着验证流程已经接近尾声。为了验证被测设计处理复杂情况的能力,选择一些复杂应用程序来进行最后一个阶段的验证。
表2为第4阶段选取的一些应用程序,通过仿真运行这些应用程序,可以测试处理器模型在复杂情况和指令组合下的处理能力。
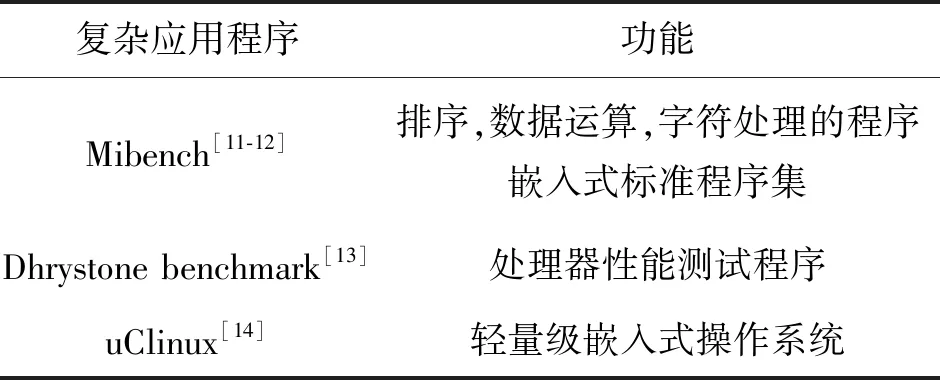
表2 复杂应用程序
3 实验结果及分析
进行初级验证以便排除低级错误,考虑到Chisel的验证能力,在正确运行如表3所示的一些手写汇编程序后,即可进入第2阶段的验证。
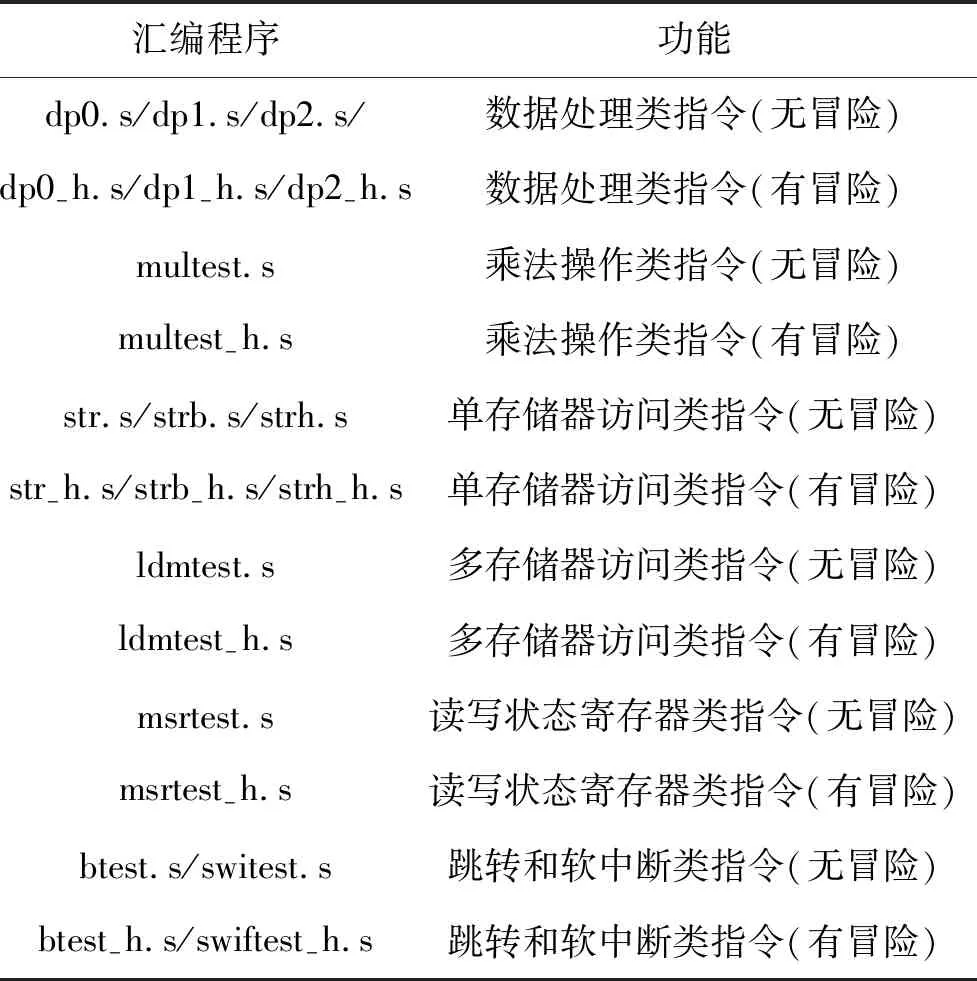
表3 部分手写汇编程序
手写的汇编程序涵盖了指令集中的所有指令,分为有冒险和无冒险的指令,用来测试被测处理器模型数据通路的控制通路。
3.1 第2阶段验证结果分析
第2阶段是尽快达到较高覆盖率的一个验证阶段。基于被测处理器一共提取功能点135个。为了研究随机指令数与覆盖率的关系,进行了多次仿真实验,仿真了第25~700条指令,实验所得数据如表4所示。
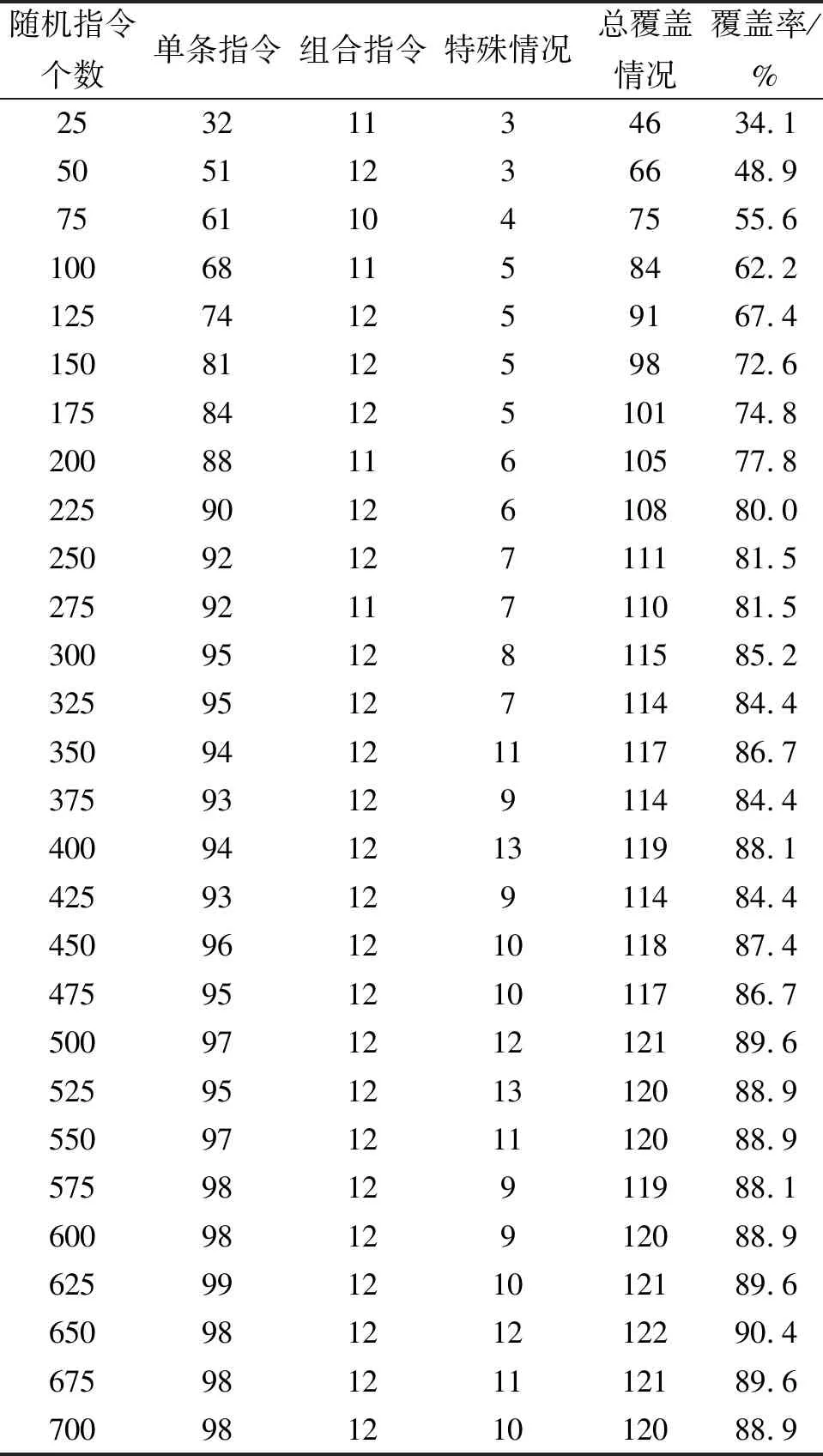
表4 随机测试激励覆盖情况
从表中可以看出当指令数达到575时,单条指令类的功能点数就可以覆盖到98。功能点数无法达到100是因为在随机时没有随机2条更改状态寄存器的指令。如果随意更改状态寄存器的值就会导致处理器处于未知甚至非法的运行模式,从而发生错误。因此这2条指令需在第3阶段验证。组合指令类的功能点和特殊情况类的功能点则很难达到全覆盖验证。
为了研究分析第2阶段的验证何时转入第3阶段进行,统计了验证过程中随机指令数的大小和覆盖率的关系,结果如图6所示。
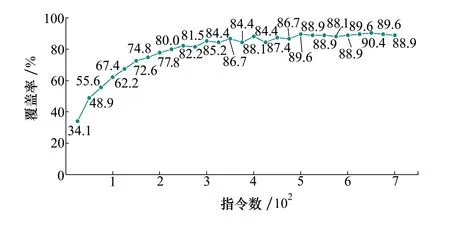
图6 随机指令数与覆盖率关系图
图中统计了随机指令数从25~700,所达到的功能覆盖率情况。从图中可以看出当指令数小于等于250时,覆盖率持续上升,而当指令数超过250之后,覆盖率开始波动性上升,超过了80%。指令数在500~700之间,覆盖率并没有明显提升。可以看到,在指令数为650时达到最高覆盖率90.4%。
指数令超过250后会有波动性的上升,是因为设计的随机指令生成器的随机数种子由时间函数产生,因此每次生成的随机测试激励都是具有独立性的随机。当生成的指令数较大时,就会产生这种波动式增长。
在第2阶段的验证中,当覆盖率达到90%左右时,再增加指令数获得的覆盖率增益微乎其微。因此,停止第2阶段的验证,进入第3阶段的验证。
3.2 第3阶段验证结果分析
在完成第2阶段的验证之后,行覆盖率和功能覆盖率均处于较高的水平。第3个阶段主要通过分析覆盖率报告有目的性地设计测试激励,覆盖未覆盖到的所有功能点。表5列举了在结束第2阶段的验证之后得到的一些代表性的未覆盖到的功能点。
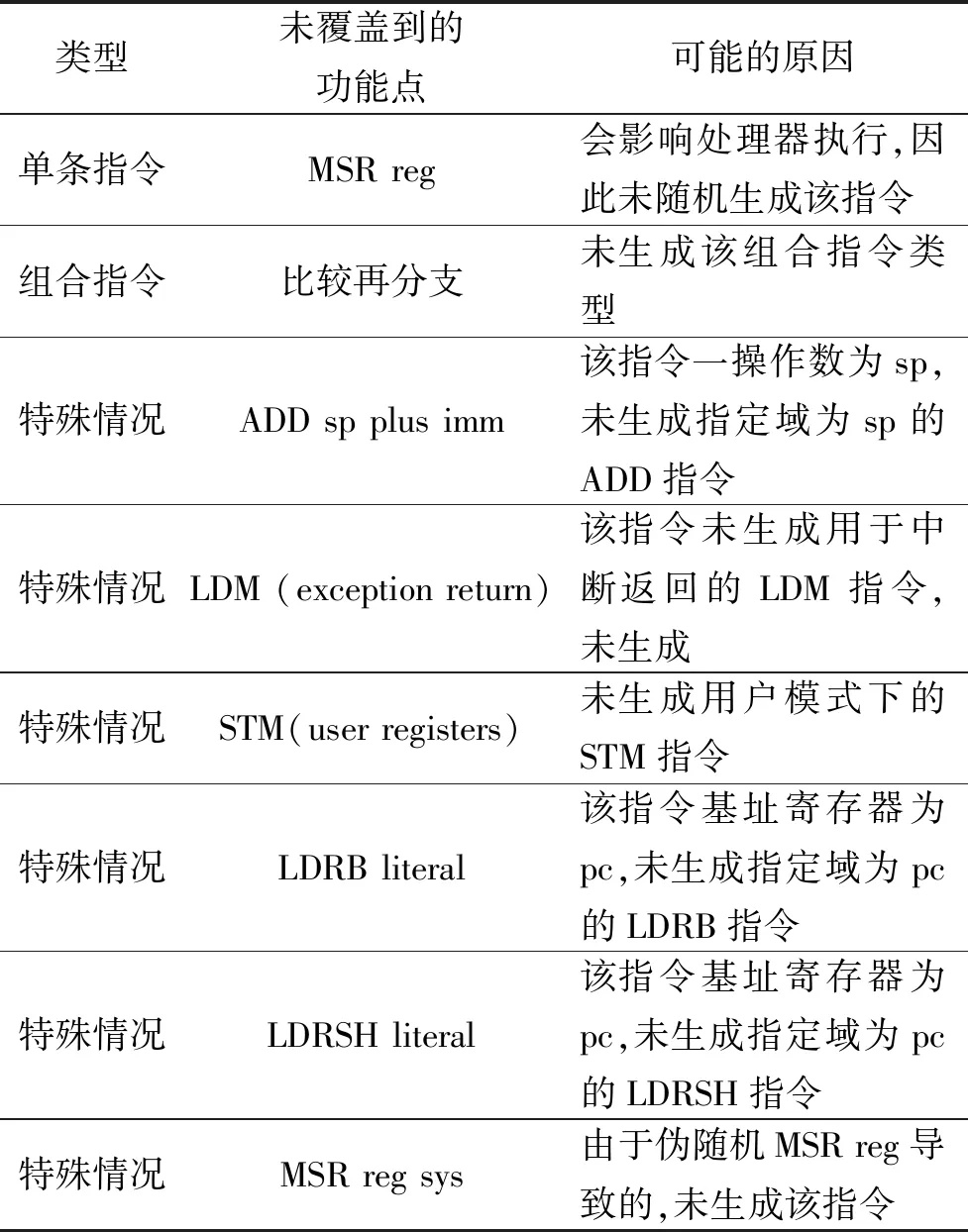
表5 未覆盖到功能点列举
从表中可以看出,单条指令类、组合指令类和特殊情况类的功能点均有未覆盖到的,而大多数为特殊情况功能点。
重复性地分析覆盖率报告并增加测试激励,直到代码覆盖率和功能覆盖率达到100%,即可进入下一阶段的验证。
3.3 第4阶段验证结果分析
第4个阶段主要是进行一些复杂应用程序的验证。stringsearch-small是嵌入式标准程序集Mibench的一个字符查找程序。该程序在处理器模型上通过模拟的串口输出57行字符,与Mibench提供的stringsearch-small程序的正确输出完全相同。
在嵌入式处理器中,Dhrystone Benchmark是一种经常使用的测试标准。图7为运行Dhrystone 2.1的仿真截图。
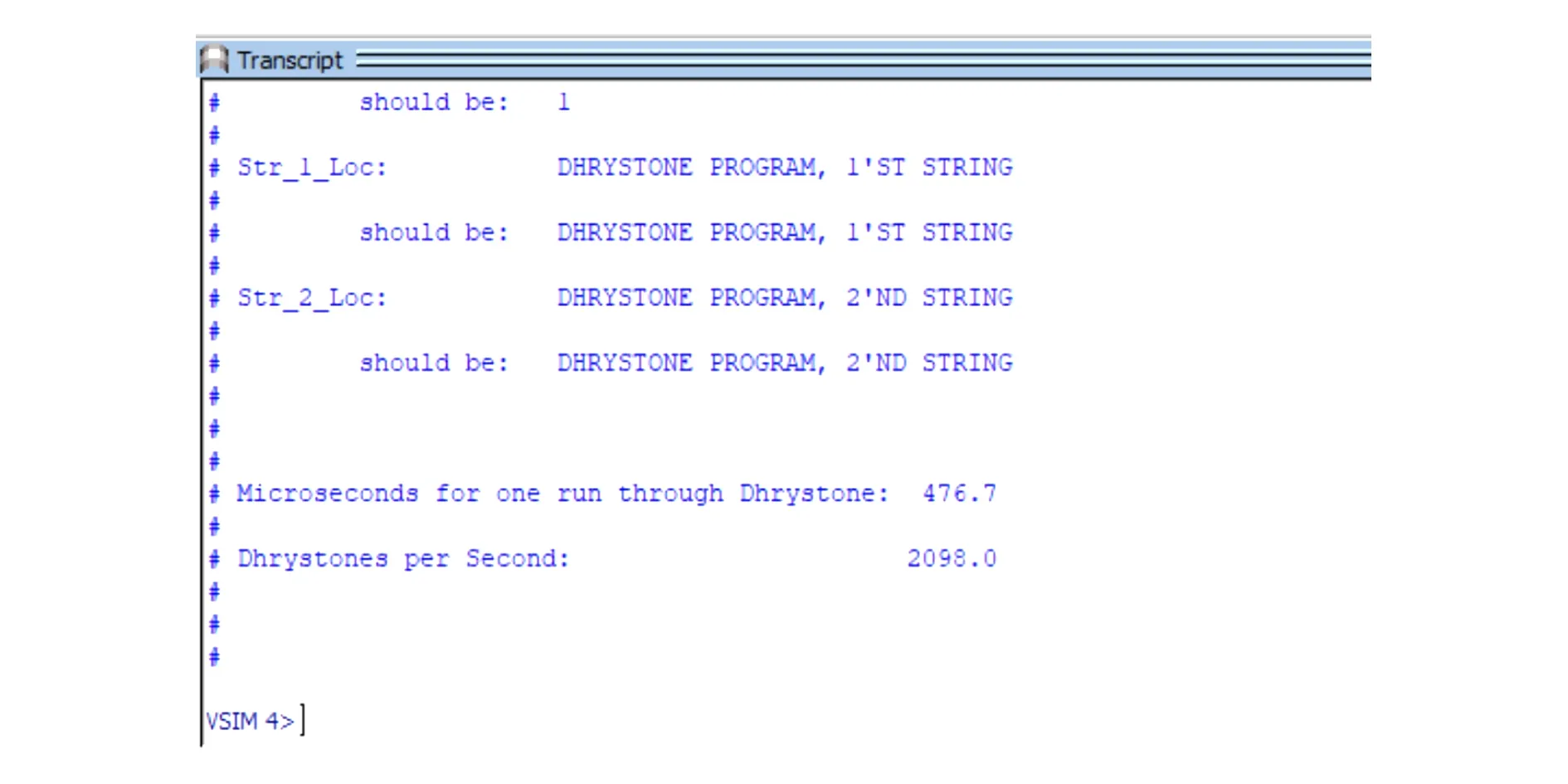
图7 Dhrystone仿真图
从图中可以看到每秒钟能执行Dhrystone Benchmark程序2 098次。
除了上述测试激励外,还使用了嵌入式操作系统uClinux进行验证。uClinux的启动分为2个阶段[15],第1个阶段是bootloader的启动阶段。第2阶段是对内核进行初始化和启动的阶段。
仿真之前,首先要设置好启动过程中需要访问的寄存器值。其次使用initial语句产生IRQ中断并分配好存储器。接着就可以仿真真实的硬件环境,在Modelsim中启动操作系统。图8为在Modelsim中仿真运行操作系统的运行截图。
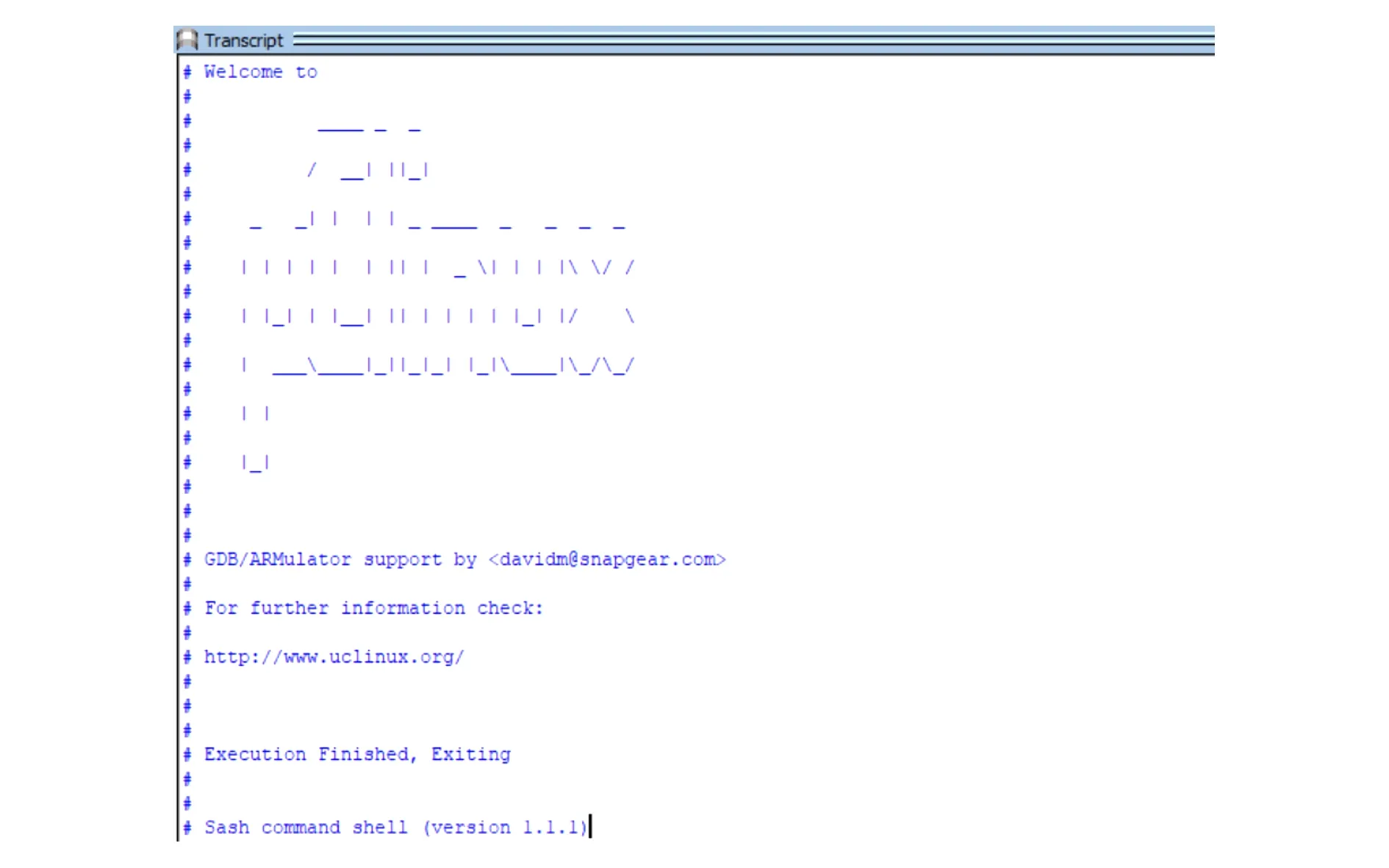
图8 uClinux操作系统仿真图
启动过程需要在Modelsim中仿真90 ms,其中时钟周期为10 ns。启动uClinux操作系统仿真了900万次时钟,一共执行了4 063 341条指令。
3.4 基于FPGA的验证结果分析
在进行大型程序仿真时选用基于FPGA的验证方法进行仿真验证。硬件环境为:FPGA型号Xilinx Artix-35T FPGA(xc7a35ticsg324-1L),处理器Intel Core i5-3230M CPU。软件环境为:Windows 10专业版,64位操作系,Vivado 2016.4,Tera Term串口软件。
基于FPGA搭建的验证系统,如图9所示。
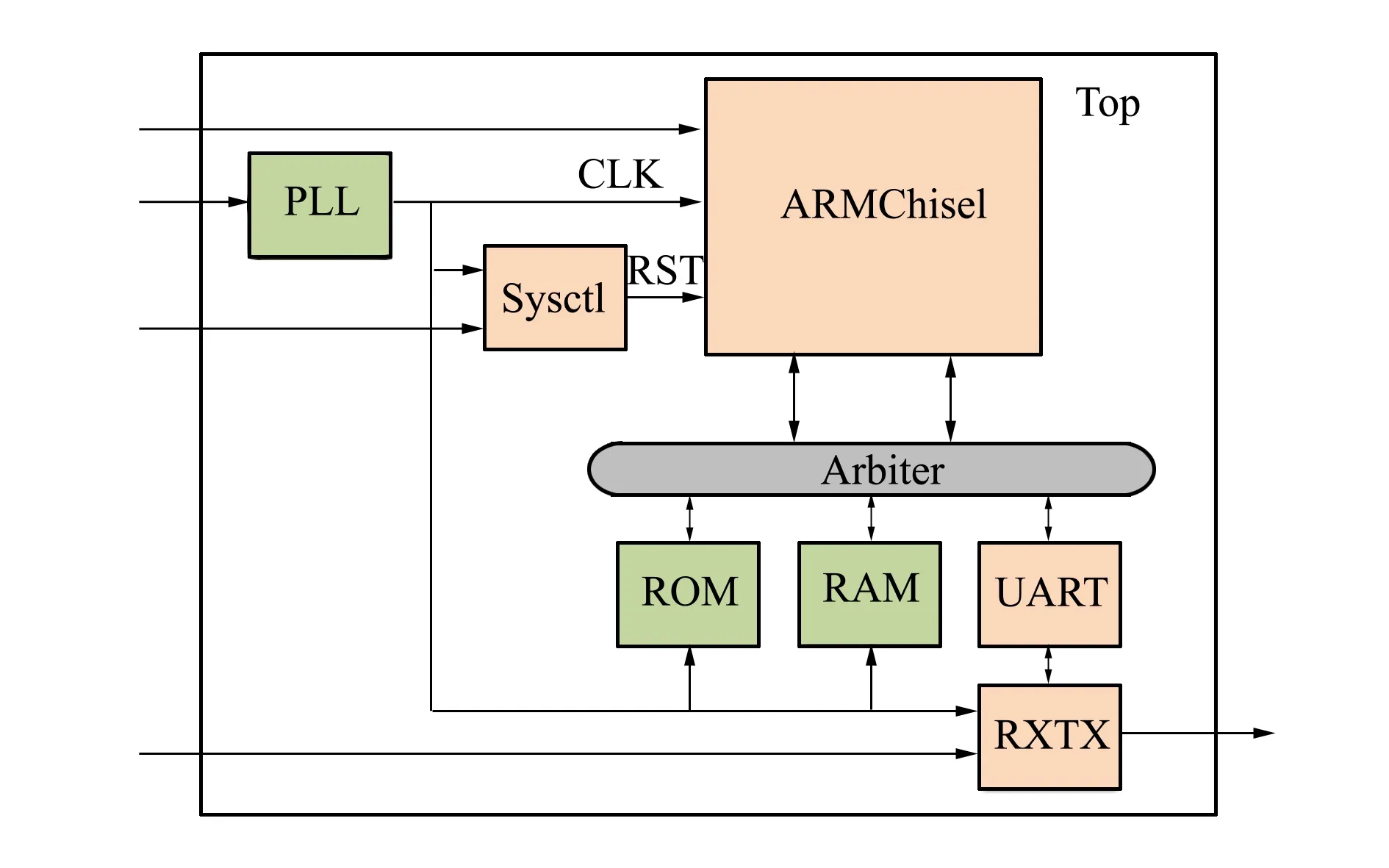
图9 片上系统结构图
图中PLL、ROM、RAM均使用Xilinx提供的IP核构建。ARMChisel、Sysctl、Arbiter、UART、RXTX分别为使用硬件语言描述的功能模块。
在前期验证充分的情况下,使用Vivado提供的逻辑分析仪(integrated logic analyzer,ILA)核,可以使用网表插入调试探测的方法进行验证,并分析调试结果。
图10为FPGA加速验证的连接图。Arty开发板正在加速仿真Mibench标准程序集的basicmath-small测试程序。
从捕获到的波形图上可以得到,ARMChisel处理器模型运行该程序用了1 694 387 630个时钟周期,共执行了1 007 179 985条指令。串口软件输出为加速仿真basicmath-small测试程序时Tera Term串口软件的输出。将串口输出的内容与Mibench提供的正确输出结果进行比较,共19 733行输出,与正确输出完全相同,ARMChisel处理器模型均运行正确。
另外,该过程还验证Mibench的一系列标准测试程序。串口软件的输出结果均与Mibench程序集正确输出结果相同。
使用FPGA进行加速验证可以加快程序仿真速度,然而相比于基于仿真的验证,调试信号的可视性较低,定位错误能力低,潜在延长了设计验证时间。因此,基于硬件的加速验证适合后期加速大型程序的验证。通过加速验证这些标准程序集的程序,进一步提高了验证效率。
4 结 论
本文研究了由新型硬件语言Chisel构建的兼容ARM V4架构的嵌入式处理器模型的验证方法。主要得到3个结论:①设计了支持ARM V4 ISA全部指令的随机指令生成器。可生成大量的测试激励用于随机测试,加快了生成激励的速度。②被测处理器模型由新型硬件语言构建,针对这一特点设计了4个阶段的验证:Chisel层面初级验证、覆盖率快速验证、直接测试验证和复杂应用程序验证,并分析了各阶段转换的时机,确保了预期的覆盖率要求。③搭建了基于Chisel语言层面的测试平台,研究了在Chisel层面进行正确性验证和覆盖率收集的方法。由于Chisel验证的局限性,搭建了基于Verilog语言层面的测试平台进行验证。测试平台收集覆盖率同时能快速准确地发现错误并定位错误,提高了验证速度。
猜你喜欢
今日农业(2022年15期)2022-09-20 06:54:16
今日农业(2021年21期)2021-11-26 05:07:00
装备制造技术(2020年11期)2021-01-26 00:39:12
铁道通信信号(2018年2期)2018-04-18 12:18:23
电镀与环保(2016年3期)2017-01-20 08:15:32
西南交通大学学报(2016年6期)2016-05-04 04:13:05
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13
机械制造与自动化(2014年1期)2014-03-01 04:21:55