基于自抗扰技术的直驱风机高电压穿越控制策略
2023-11-20 11:29张梦阳刘毅力朱晓龙刘圣荇
分布式能源 2023年5期
张梦阳,刘毅力,朱晓龙,刘圣荇
(西安工程大学电子信息学院,陕西省 西安市 710048)
0 引言
近年来,直驱式永磁同步风力发电机组(permanent magnet synchronous wind turbine generator,PMSG)在风电场中应用广泛,具有运行可靠性高、机械损耗小、便于维护等优点。随着直驱风电机组的应用,如何应对电网电压骤升故障,保障风电机组稳定安全可靠运行,已引起国内外学者的广泛关注[1-2]。
当电网电压骤升后,由于直驱风机直流侧瞬时的能量不平衡,导致直流母线电压升高,网侧变流器及直流母线电容无法承受过电压和过电流,进而导致风电机组脱网[3]。所以,风电机组需要具备一定的高电压穿越(high voltage ride through,HVRT)能力,即当电网故障或扰动引起电压升高时,在一定的电压升高范围和时间间隔内,风电机组保证不脱网而连续运行的能力。
提升风电机组HVRT 能力的策略主要有:增设相关辅助保护设备及硬件保护电路[4];在风电机组的现有控制策略上进行提高和改善[5-6]。增设的辅助装置包括动态电压恢复器(dynamic voltage restorer,DVR)、静止无功补偿器(static var compensator,SVC)及静止同步补偿器(static synchronous compensator,STATCOM),这类辅助装置可将故障和机组隔离从而保证系统安全不脱网运行。辅助装置还包括直流母线斩波电路及Crowbar保护电路,额外的卸荷电路可将电网中故障期间的多余能量消耗掉,从而实现HVRT。文献[7-8]提出基于混合储能系统的控制策略来应对电网故障时的直流母线过电压,提升机组HVRT 能力,然而复杂工况中混合储能的功率分配和优化配置有待进一步考虑。文献[9]在电网电压骤升时,采用了双闭环控制策略控制STATCOM,补偿电网感性无功、吸收容性无功,但考虑大规模风电场高电压故障时,所需STATCOM 容量会很大。文献[10]提出了考虑变直流母线电压参考值和网侧无功优先控制相结合的HVRT 控制方案,将无功电流给定值优化后注入电网,并考虑直流母线电压参考值与网侧无功模式协调控制,但在电网电压深度骤升时效果并不理想。文献[11-12]采用变阻值撬棒电路及卸荷电路抑制电网电压骤升,能有效应对直流母线电压升高导致的系统不稳定,改善机组故障结束后的运行特性,然而在功率控制方面略显不足,影响机组的故障穿越性能。文献[13]在传统逆变器系统双闭环控制中引入线性自抗扰控制(linear active disturbance rejection control,LADRC),在总扰动通道中加入一阶惯性环节,对比典型双闭环控制,提高了抗扰性能,在负载突变过程中的电压跌落幅度更小,然而参数设计的复杂程度有所提高。文献[14]采用基于LADRC控制策略的储能并网逆变器,将总扰动的增益系数换成比例微分环节,该控制策略在网侧电压跌落故障情况下能更好地维持直流侧母线的稳定,但同时会增加高频段噪声,有待进一步改进。
综上,本文在传统LADRC控制的基础上,将总扰动的微分扩张为一个新的状态变量,进而提高线性扩张状态观测器(linear extended state observer,LESO)的扰动观测能力。现如今LADRC 控制在应对HVRT领域中研究较少,因此本文在永磁直驱式风力发电系统电网电压骤升基础上,根据风力发电HVRT 标准,在PMSG 网侧变流器中引入LADRC控制器,采用改进LADRC控制策略来应对PMSG的HVRT。最后,通过Matlab/Simulink仿真对所提方案的HVRT能力进行验证。
1 风电机组HVRT 技术要求
由于故障或扰动导致电网电压升高时,风电机组须在一定的电压范围和时间间隔内保证不脱网稳定运行一定时间。为达到HVRT 的标准和要求,不同国家和地区根据本国实际情况制定了风电机组HVRT技术标准,并进一步规范了风机并网要求[15]。世界各国风电并网技术规范在HVRT技术要求中需要考虑高电压的故障类型、高电压的幅值、高电压持续时间等。表1为国外风电机组的HVRT技术要求。

表1 国外风电机组的HVRT技术要求Table 1 Technical requirements for HVRT of wind turbines in aboard
我国国家能源局在2018年制定了GB/T 36995—2018《风力发电机组-故障电压穿越能力测试规程》,并在2019年正式实施。该测试规程对风电机组高电压故障穿越能力作了明确技术规定,图1为我国风电机组的HVRT 技术要求。根据图1风机的HVRT技术曲线可看出:电网电压骤升至1.1 pu时,风电机组需保持持续并网运行;电网电压骤升至1.2 pu时,风电机组需并网运行9 s;电网电压骤升至1.25 pu时,风电机组需并网运行0.5 s;电网电压骤升至1.3 pu时,风电机组需并网运行0.5 s。

图1 我国风电机组的HVRT技术要求Fig.1 Technical requirements for HVRT of wind turbines in China
2 电网电压骤升下直驱风机故障运行分析
2.1 永磁风力发电系统并网模型
永磁直驱式风力发电系统主要包含风力机、永磁同步发电机、背靠背全功率变流器及控制系统等部分,系统结构如图2所示。全功率变流器实现电能AC-DC-AC的变换,机侧和网侧相互隔离,可使风力发电机与电网解耦,有效应对电网故障[16]。因此,本文在分析HVRT 穿越特性时以网侧变流器系统为主要研究对象,机侧变流器采用双闭环解耦的比例积分(proportional-integral,PI)控制器,网侧变流器采用基于改进自抗扰的控制器。

图2 永磁风力发电系统并网系统Fig.2 Grid connected system of permanent magnet wind power generation system
在电网电压正常情况下,机侧变流器主要通过控制发电机转速来实现有功无功的解耦控制和风能的最大功率点追踪(maximum power point tracking,MPPT),网侧变流器采用电网电压定向矢量控制来调节网侧电流dq轴分量的参考值igdref和igqref,稳定直流母线电压[17]。图2中:isd、isq为定子侧电流的dq轴分量;usd、usq分别为定子电压的dq轴分量;ugd、ugq分别为网侧电压的dq轴分量;igd、igq分别为网侧电流的dq轴分量;udc为直流母线电压;ω为风机转速。
2.2 电网电压骤升下直流母线功率变化分析
同步旋转坐标系下的网侧变流器稳态方程为
式中:e d、e q分别为电网电动势的dq轴分量;R为网侧变流器电阻;L为网侧变流器电感。
网侧变流器的功率因数角一定时,网侧变流器最大输出电压与直流母线电压存在一定关系。根据电压调制理论[18],在不产生超调的情况下,调制比m应满足
当采用电网电压控制时,由于d轴与电网电动势重合,有e d=E,e q=0。忽略电阻R,将式(1)代入式(2)可得
当电网电压骤升时,网侧变流器由于容量限制,输出至电网的有功电流减小,电网能量倒灌至网侧变流器,进而使直流母线电压迅速升高直至超出正常工作范围,最终会影响整个变流器及PMSG系统。此时PMSG主回路中的功率平衡关系为
式中:ΔP为直流母线电容器承载功率;idc为直流侧电流;Cdc为直流侧母线电容;Ps为定子侧输出有功功率;Pgneg为电压升高时电网注入网侧变流器的功率;Pg为输入电网的有功功率。
3 基于改进自抗扰的直驱风机HVRT 控制
3.1 LADRC 控制
相比传统的PI控制器,LADRC控制器具有更好的控制性能,对系统扰动有更好的鲁棒性[19]。传统LADRC控制器主要由线性跟踪微分器(linear tracking differentiator,LTD)、LESO和线性状态误差反馈(linear state error feedback,LSEF)控制率这3部分构成。LESO可解决自抗扰控制中内外扰动观测的问题,是LADRC 控制器的核心部分。LESO可对电压外环控制系统中的内部和外部系统扰动进行估计并补偿;LSEF控制率将控制器带宽与控制系数相互联系,达到简化控制参数的整定过程。因此,LESO 的设计对于LADRC控制器的稳定性有着重要影响。
根据PMSG风电机组数学模型可知,网侧电流方程为
式中i L为网侧电感电流。
由于电网电压定向的矢量控制策略将电网电压定向到d轴上,d轴与电网电动势重合,得到e d=E,e q=0,因此式(5)可简化为
式中:f为系统的总扰动;b0=3e d/C。
由式(6)可知,电压外环控制系统为一阶结构,因此设计一阶自抗扰控制器,即设计二阶LESO。扩张状态方程表达式如下:
式中:b0为已知量;x=[x1,x2]T为控制系统的状态变量。
在这个扩张系统中,由于总扰动f未知,但可通过LESO估计,故省略f,因此,可得如下LESO状态方程表达式:
式中:z=[z1,z2]T为LESO状态变量;l=[l1,l2]T为状态观测器增益矩阵。通过选取合适的参数l1、l2,状态观测器便可很好地观测系统的状态变量x1、x2,z1→x1,z2→x2;y=igdref1。合理选择参数可使LESO 中状态变量实时跟踪系统状态变量。
LESF 控制率在网侧变流器电压外环一阶LADRC控制系统中,采用比例控制,即有
式中:u0为等效控制量;kp为控制参数;udcref为直流电压参考值。
将LESO估计得到的扰动在控制器输入中进行补偿,即有
式中u1为LESF输出量。
为简化LESO 参数设计,采用极点配置方法[20],将LESO的增益矩阵与带宽相联系,将式(8)极点配置在观测器带宽ω0上,得到LESO 的特征方程如下:
因此,只需合理调节参数ω0,就可使LADRC控制器达到理想的控制效果。电压外环LADRC控制框图如图3所示。

图3 电压外环LADRC控制器Fig.3 LADRC controller of voltage outer loop
3.2 改进自抗扰控制
本文在LESO 中将总扰动的微分扩张为一个新的状态变量,对总扰动的变化趋势进行提前观测,与传统LESO相比,可有效增加观测器带宽,提高LESO的动态扰动观测能力。
由式(8)(12)可得变量z1、z2的传递函数:
根据式(6)(13)得到LESO 的扰动观测传递函数如下:
由于二阶系统快速性与超调之间的矛盾制约了LESO对系统扰动的观测能力,因此建立改进的三阶LESO状态方程如下:
式中:δ1、δa、δb为改进LESO 的观测增益,合理选取观测器增益可实现对系统的观测;u为改进LADRC中LESF的输出量;z1→y,z2→f,z3→。
通过式(15)得到观测器输出z2如下:
由式(6)(16)得到改进LESO 的扰动观测传递函数如下:
通过极点配置法,得到观测器增益配置如下:
由式(15)(18)可得
与式(14)对比可发现,式(17)中的传递函数增加了1对可变零极点,将极点配置在-ω0处,这样不仅可减少参数整定,同时也能降低参数整定难度,提高观测器的扰动观测能力。改进LADRC详细控制框图如图4所示。

图4 改进LADRC的详细控制框图Fig.4 Detailed control block diagram of improved LADRC
根据式(14)(17)得到传统LESO和改进LESO扰动传递函数的伯德图,如图5所示。可见:相比传统LESO,改进LESO的系统带宽有了明显改善,得到明显增强,中频段的相位滞后也得到明显缓解,抗扰性能进一步增强,系统的动态响应能力也有一定的提高。

图5 扰动传递函数伯德图对比Fig.5 Bode diagram comparison of disturbance transfer functions
3.3 改进自抗扰控制的稳定性分析
结合式(9)(19)可得
由式(20)可得系统闭环传递函数:
由于控制器带宽ωc与观测器带宽ω0均为正,可得a i>0,i=1,2,3。故系统能保持稳定,改进的控制方案对外部干扰有良好的抑制作用。
3.4 网侧无功补偿控制
根据国家能源局制定的《风力发电机组-故障电压穿越能力测试规程》中对风电场的无功补偿要求,电网故障时,风电机组提供的动态感性无功电流应满足
式中:ug为并网点电网实际电压标称值;ugn为并网点额定电压标称值;in为额定电流;μ为比例系数,根据要求,μ≥1.5。
同时,为避免电压突增时网侧变流器超出其最大允许电流值igmax,网侧有功电流参考值igdref需满足[21]
PMSG机组网侧变流器控制框图如图6所示,在电网电压正常情况下,此时无功电流参考值选定为igqref1,当有功电流igdref1<igdref2时,有功电流值选定为igdref1。当电网电压骤升超过1.1 pu时,无功电流参考值选定为igqref2;此时,当有功电流参考值igdref1>igdref2时,有功电流参考值选定igdref2。在电网电压骤升过程中实时监测直流母线电压值,当直流母线电压超过限值后,通过直流侧卸荷电阻抑制直流母线电压的突升,保证机组不脱网连续运行。

图6 网侧变流器控制系统Fig.6 Control system of grid side converter
4 仿真分析
4.1 参数设置及工况
为验证本文所提方案的有效性及合理性,在Matlab/Simulink中搭建图2所示风力发电厂并网系统仿真模型,网侧变流器采用图6所示控制系统。表2为系统主要仿真参数,表3为控制器参数。

表2 系统仿真参数Table2 Simulation parameters of thesystem

表3 改进LADRC控制器参数able 3 Controller parameters of improved LADRC
根据我国风电并网准则要求,设置2种工况来模拟风电机组电网电压骤升情况以验证HVRT 方案的有效性:工况1,电网电压骤升至1.15 pu,从2 s开始持续6 s,8 s时恢复至正常电压;工况2,电网电压骤升至1.2 pu,从2 s开始持续9 s,11 s时恢复至正常电压。
4.2 仿真分析
工况1时的电网故障电压如图7所示。图8—10分别为采用3种控制方法时的直流母线侧电压、网侧变流器有功功率和无功功率。

图7 工况1时的电网故障电压Fig.7 Grid fault voltage at condition 1

图8 工况1时的直流母线侧电压Fig.8 Voltage of DC bus side at condition 1
由图8可知,当电网电压骤升时,风机侧的功率传递至直流母线,母线电压骤升后保持稳定。故障开始阶段,采用PI控制时直流母线电压波动范围为1.035~1.271 k V,调节时间为2.33 s,故障结束后,在8.45 s时降至1.2 k V并保持稳定运行;采用传统LADRC控制时直流母线电压波动范围为1.149~1.238 k V,调节时间为2.11 s,故障结束后,在8.15 s时降至1.2 k V并保持稳定运行;采用改进LADRC控制时直流母线电压波动范围为1.190~1.238 k V,调节时间为2.05 s,故障结束后,在8.03 s时降至1.200 k V并保持稳定运行。可见,本文提出的改进LADRC控制策略在超调方面要优于另外2种控制策略,有效缩小了直流母线电压波动范围,并且减少了调节时间,使直流母线电压更快恢复稳定。
由图9可知,风电机组在稳态情况下运行于最大功率跟踪状态来实现有功的单位功率因数传输。采用PI控制时,网侧有功功率在2.26 s时稳定在正常值附近;采用传统LADRC控制时,网侧有功功率在2.15 s时稳定在正常值附近;采用改进LADRC控制时,网侧有功功率在2.06 s时稳定在正常值附近。由图10可知,在故障状态下,网侧运行于无功补偿模式,为电网提供约0.78 Mvar的无功功率,本文控制策略能有效满足电网对机组的无功补偿要求。

图9 工况1时的有功功率波形图Fig.9 Waveform diagram of active power at condition 1

图10 工况1时的无功功率波形图Fig.10 Waveform diagram of reactive power at condition 1
工况2 时的电网故障电压如图11 所示。图12—14分别为采用3种控制方法时的直流母线侧电压、网侧变流器有功功率和无功功率。
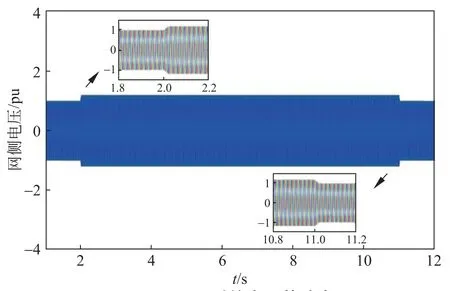
图11 工况2时的电网故障电压Fig.11 Grid fault voltage at condition 2

图12 工况2时的直流母线侧电压Fig.12 Voltage of DC bus side at condition 2
由图12可知:故障开始阶段,采用PI控制时直流母线电压波动范围为1.040~1.366 k V,调节时间为2.34 s,故障结束后,在11.55 s时降至1.2 k V并保持稳定运行;采用传统LADRC控制时直流母线电压波动范围为1.144~1.328 k V,调节时间为2.12 s,故障结束后,在11.25 s时降至1.200 k V 并保持稳定运行;采用改进LADRC控制时直流母线电压波动范围为1.189~1.328 k V,调节时间为2.04 s,故障结束后,在11.06 s时降至1.200 k V 并保持稳定运行。可见,本文提出的改进LADRC控制策略有效缩小了直流母线电压波动范围,减少了调节时间。
由图13可知,风电机组在稳态情况下运行于最大功率跟踪状态来实现有功的单位功率因数传输。采用PI控制时,网侧有功功率在2.31 s时稳定在正常值附近;采用传统LADRC控制时,网侧有功功率在2.16 s时稳定在正常值附近;采用改进LADRC控制时,网侧有功功率在2.07 s时稳定在正常值附近。由图14可知,在故障状态下,网侧运行于无功补偿模式,为电网提供约1.08 Mvar的无功功率,本文控制策略能有效满足电网对机组的无功补偿要求。

图13 工况2时的有功功率波形图Fig.13 Waveform diagram of active power at condition 2

图14 工况2时的无功功率波形图Fig.14 Waveform diagram of reactive power at condition 2
综上所述,改进LADRC控制相比传统LADRC控制,在缩小直流母线电压波动范围的同时减少了调节时间,具有较强的抗扰动能力,加快了系统的响应速度,有效改善了系统动态特性;改进LADRC控制相较于传统LADRC控制,能有效抑制直流母线电压波动,将网侧有功更快地稳定在正常值附近,没出现较大的波动;同时,网侧无功补偿模式为电网提供无功支撑,满足电网要求,本文所提控制方案能有效应对风电机组的HVRT故障。
5 结论
本文主要研究了直驱式风电机组在高电压故障期间的控制策略,提出了一种基于改进LADRC的直驱风电机组HVRT 控制策略。在电网电压骤升前后,合理选定有功电流和无功电流参考值,直流母线侧卸荷电阻协同网侧无功补偿模式,快速为电网提供无功支撑,使电网电压恢复正常运行。由仿真结果可见,该控制策略可有效抑制直流母线电压波动,具有较强的抗扰动能力,可保证机组在HVRT期间不脱网连续运行。本文所提出的改进LADRC控制器能否结合STATCOM 等无功补偿设备来提高直驱风电机组的HVRT 能力为后续研究重点。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2019年4期)2019-10-10
贵州师范学院学报(2016年3期)2016-12-01
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
电源技术(2015年11期)2015-08-22
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年19期)2014-04-04