
基于视频检测的低等级公路交叉口交通冲突预警技术研究
2023-11-17 08:29翟亚东贺海军杨卓敏王倩倩
交通科技与管理 2023年21期
翟亚东,刘 凡,贺海军,杨卓敏,王倩倩
[1.新疆大学交通运输工程学院,新疆 乌鲁木齐 830017; 2.新疆维吾尔自治区公安厅交通警察总队,新疆 乌鲁木齐 830000;3.公安部交通管理科学研究所(道路交通安全公安部重点实验室),江苏 无锡 214151]
0 引言
农村低等级公路是我国交通网络的重要组成部分,由于缺乏基础设施和交通信号灯等,存在较大的安全隐患,为解决这一问题,落实《交通强国建设纲要》[1],交通运输部印发了《农村公路中长期发展纲要》[2],提出了加强农村公路交通安全管理隐患治理的措施。所以在低等级公路交叉口设计冲突预警平台是有必要的。
目前应用在低等级交叉口的交通冲突预警技术研究较少,该文基于车辆实时驾驶场景,以低等级T 形交叉口为例,研究了一种交通冲突预警技术,并搭建了低等级公路交叉口交通冲突预警平台。
1 基于yolo v3 卷积神经网络构建车辆检测模型
1.1 建立五种车辆类型在不同场景下的样本库
不同类型的车辆在实际运行的路况中,制动性、操纵稳定性、承载性等因素具有较大差异,根据低等级公路常见的车辆类型,通过录制低等级公路驶向交叉口的车辆视频,经过视频抽帧后,将图片保存为jpg 文件格式,制作五种车辆类型的图像集,如图1 所示。在众多的环境因素中,天气因素对驾驶员的驾驶行为、视频检测效果的影响最为明显,如雨雪天、雾天、高温天、大风天等其他恶劣天气。根据视频车辆检测的日常环境影响因素考虑,采集了五种场景下的车辆样本,如图2 所示。

图1 五种车辆类型

图2 五中场景下的车辆样本库
1.2 yolo v3 卷积神经网络训练模型
所采用的yolo v3 卷积神经网络结构的backbone为Darknet-53,卷积神经网络中存在大量的残差结构Residual,网络的输入尺度是416×416,卷积层输出的特征图尺度为13×13,通道数为1 024。在yolo v3 中,Darknet-53 网络只用于提取特征,并且输出了三种不同尺度的特征图13×13、26×26、52×52。
该算法通过输入图像数据集,将处理好的图片批量放入yolo v3 卷积神经网络中VOCdevkit 的JPEGImages 文件夹中;将标注后生成的xml 文件批量存放在Annotations 文件夹中。对其实现图像增强,构建神经网络,将图像增强处理后的数据集输入神经网络中,运行train.py 程序训练后输出权重参数文件,存储在logs 文件夹中;调整相关参数后,运行算法程序进行训练。
统计车辆样本库经卷积神经网络训练后五种车辆类型在各环境下的识别率,如表1 所示。

表1 五种车辆类型在不同环境下的识别率
1.3 构建车辆检测模型
yolo v3 卷积神经网络中,predict.py 将单张图片预测、摄像头检测等功能整合到了一个python 文件中,通过指定mode 进行模式的修改。基于要实现的视频检测功能,则指定mode 为video 进行视频检测,构建车辆检测模型。
2 低等级公路的接入口管理分析
2.1 支路接入口管理的基本概念
(1)接入管理的定义是指针对特定的道路,以低等级公路与支路相接为例,对所接入的支路进行一系列系统的控制,对维护道路通畅及安全发挥了重要的作用[3]。
(2)接入管理的目的是在保证低等级公路运输系统高效和安全的前提下,对道路周边地区所接入支路产生的交通需求,进行更安全、有效地接入。
2.2 支路接入口管理主要措施
研究低等级公路与其相接支路的交通运行管理方式后,总结出公路交通运行管理的总体思路是在服务远距离通行需求的可达道路时,注重道路流动性,保证主路优先通行原则。根据车辆实际驾驶场景,支路与低等级公路相接形成小接入口。无论十字路口还是T 形交叉口,该文均只考虑靠近支路一侧的低等级公路与其相接的支路。
3 低等级公路交叉口冲突区域分析
3.1 交通冲突的基本概念
交通冲突是指在可观测的条件下,两个或两个以上道路使用者在同一时间、空间上相互接近,如果其中一方采取非正常的交通行为,如转换方向、改变车速、突然停车等,除非另一方也相应采取避险行为,否则,将会发生碰撞[4]。
3.2 交叉口冲突点分析
分析靠近支路的低等级公路车辆可能与支路上的车辆产生的冲突点,在实际驾驶场景中,当驾驶员面临支路接入方向的交通冲突时,由于未获取到支路上的路况信息,不能及时采取减速、停车驾驶操作,很可能会造成交通事故。主要冲突点是由支路车辆左转、右转与靠近支路的低等级公路车辆直行所构成,于是针对支路方向进行预警,防止支路车辆直接驶入交叉口冲突区域。
4 冲突预警平台设计
4.1 支路车辆的驾驶行为分析
在支路车辆接近交叉口时,驾驶员的驾驶行为会经历三个阶段,一是接收预警阶段;二是驾驶决策阶段,判断是否要进行减速、停驶驾驶操作;三是减速停驶阶段,避免直接驶入交叉口,与低等级公路车辆产生冲突。
4.1.1 接受预警阶段
驾驶员接受支路冲突预警平台的声光预警信号。在行驶至低等级公路交叉口时,驾驶员会注意到可能有冲突车辆进入交叉口,即低等级公路左侧的交通冲突。其次由于驾驶员接受预警信号不及时等原因,导致接受预警阶段持续时间延长,则可能会影响接下来的驾驶行为决策。
4.1.2 驾驶决策阶段
驾驶员在此阶段观测道路路况并做出决策。当驾驶员接收到声光冲突预警信号时,根据实际道路状况判断是否需要减速或停车等操作。整个决策过程车辆保持原有的驾驶状态,此过程需要驾驶员在短时间内做出决策,否则会影响下一阶段的驾驶操作。
4.1.3 减速停驶阶段
驾驶员进行实际的车辆驾驶操作和控制。驾驶员需要留意低等级公路方向和支路上的车辆行驶状态,采取减速、停车等驾驶操作,以确保支路上的车辆不进入交叉口冲突区域。所驾驶车辆的速度将会发生显著变化,直至支路冲突预警平台的声光预警信号消失后,冲突状态才会改变。
4.2 交叉口视距三角形
考虑低等级公路的特殊性,因其不完善的交通设施及较小的交通量,不设置交通信号灯及相关标志标线,若存在视距被遮挡的情况,会容易在交叉口发生交通事故。许多与支路相接构成的交叉口则可称为主路优先控制交叉口。
该文所提到的主路优先控制交叉口是指对低等级公路采取主路优先控制管理手段的交叉口,根据道路交通安全隐患处理的要求,交叉口的视距三角区如果被树木或者建筑遮挡,如图3 所示,应需延长视距。
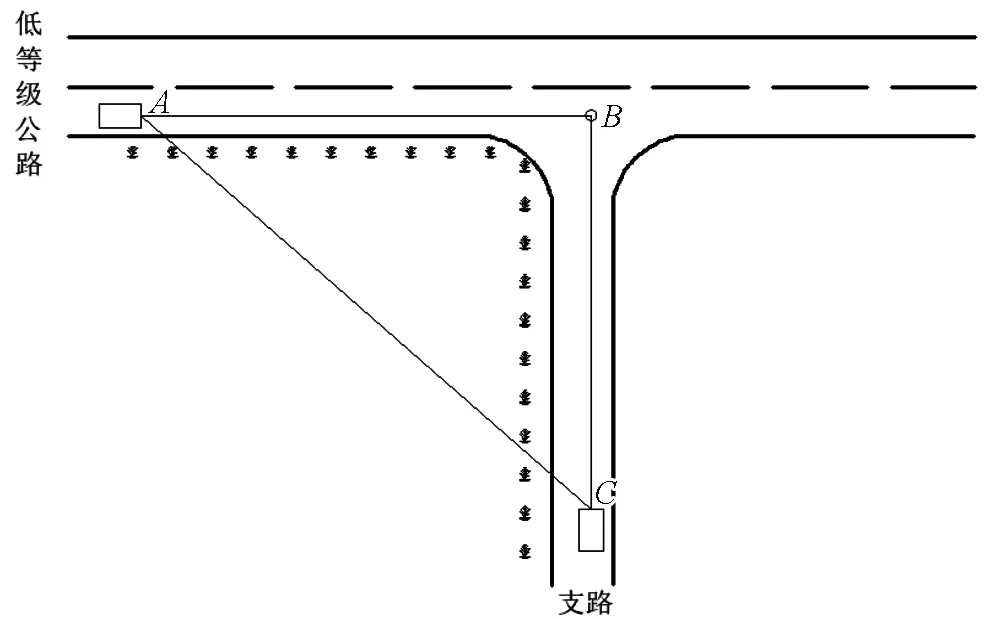
图3 交叉口的视距三角区ΔABC
若考虑最不利的情况,则交叉路口的视距三角形由低等级公路最靠右侧车道的中轴线和相交支路靠近道路中心线的直行车道所确定。该文的冲突预警平台可作为延长交叉口安全视距的设备,则支路方向的预警平台及车辆的视距采用停车视距,我国低等级公路的设计速度及停车视距如表2 所示。

表2 我国低等级公路的设计速度及停车视距
4.3 支路冲突预警平台位置设置
根据驾驶员的驾驶行为,确定冲突预警平台的设置位置应在支路接入口右侧。针对低等级公路方向车辆进行识别检测,当视频检测平台检测到低等级公路有车辆驶向时,声光预警平台对支路车辆进行预警,预警信号直至低等级公路车辆驶出交叉口冲突区域停止,以提醒支路车辆减速慢行。
按照支路驾驶员看到交叉路口预警平台发出的预警信号,采取减速、停驶驾驶操作的安全停车距离公式,如公式(1):
式中,s——安全停车距离(m);s1——反应距离,指驾驶员发现前方的阻碍物,经过决策后采取制动措施的那一瞬间到制动器真正开始起作用的那一瞬间汽车所行驶的距离(m);s2——制动距离,汽车完全刹停所走的距离(m);v——车辆行驶限速(m/s);t——驾驶员反应时间,一般取t=2.5s;φ——路面与轮胎间的附着系数,一般按路面在潮湿状态下的值计算;ψ——道路阻力系数。
式(1)中,φ+ψ为摩擦系数,正常情况下,干燥水泥路面的摩擦系数为0.6~0.7,由此计算得出支路方向的安全停车距离为28.12 m。此外,当车辆通过交叉口时,应在30~50 m 的地方减低速度,若仅考虑道路最高限速,支路声光预警平台的设置距离满足50 m 即可,如图4所示。

图4 交叉口声光预警平台的设置距离
4.4 搭建冲突预警平台
将已构建的车辆检测模型放入视频检测平台中,并设计冲突预警平台中的报警系统,采用LED 灯及蜂鸣器的声光预警方式。信号继电器与视频检测平台、声光预警平台一起,可以组成程序控制线路,实现自动化运行。相关设计流程图如图5 所示。

图5 冲突预警平台设计流程图
若冲突预警平台判断低等级公路方向有车辆驶向交叉口时,如图6 所示。声光预警平台将检测的结果以信号灯亮灯、蜂鸣器报警的方式进行输出(持续至低等级公路车辆驶离交叉口冲突区域),以提醒支路驾驶员小心慢行,有车辆即将驶入交叉口。

图6 低等级公路方向车辆驶向交叉口
5 结论与展望
该文进行了低等级公路交叉口冲突预警技术的研究,使用了基于yolo v3 的视频检测算法,构建视频检测模型后,针对低等级公路方向的车辆进行识别,并对冲突预警区域进行分析,包括接入口管理和冲突区域分析。确定了冲突预警平台的设置位置和触发控制条件。对支路方向的机动车、非机动车、行人进行预警,在支路驾驶员接收到冲突预警平台发出的声光预警信号后,进行减速、停驶的驾驶操作,以确保支路的车辆和行人不进入到交叉口冲突区域中,保障了低等级公路方向主路优先通行的原则,也保证了支路的车辆和行人的安全。但研究仍存有不足,还需进一步完善:文中提出了冲突预警平台的设计理念,但在实施过程中需要考虑低等级公路方向车辆的车速阈值,以确定在达到何种阈值时触发声光预警,提高驾驶员对冲突预警平台的信任度。
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
压电与声光(2020年1期)2020-03-12
压电与声光(2019年1期)2019-02-22
数字通信世界(2018年11期)2018-12-13
中国交通信息化(2017年12期)2017-06-06
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
电信科学(2016年9期)2016-06-15
电测与仪表(2016年13期)2016-04-11
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
