波浪能量采集及自供能海洋无人机电系统研究进展1)
2023-11-16 06:41邹鸿翔苏昌胜赵林川张文明魏克湘
力学学报 2023年10期
邹鸿翔 苏昌胜 赵林川 张文明 魏克湘,2)
* (湖南工程学院机械工程学院,湖南湘潭 411104)
† (上海交通大学机械系统与振动全国重点实验室,上海 200240)
引言
海洋环境传感器、航行器/机器人等无人机电系统是人类探索与开发海洋的重要工具,在海洋监测[1]、海洋作业[2]、海洋科考[3]等方面发挥着重要作用.海洋无人机电系统一般携带电池供能,但电池电量有限限制了无人机电系统的作业时长与范围.尽管可以布置充电基站或供电船等为无人机电系统补充电能,但是这些设备设施一方面实施难、成本高,另一方面也限制了无人机电系统的灵活性[4].长期有效供能是制约海洋无人机电系统探索深海远海的瓶颈难题.
波浪能是最丰富并且可以被大规模应用的可再生能源之一.波浪能的能量密度高于风能和太阳能约1~2 个数量级,而且不受昼夜变化影响[5].将波浪能转换为电能,可以实现海洋无人机电系统的自供能传感、控制与驱动,有望破解海洋无人机电系统供能瓶颈难题.此外,随着化石能源面临着枯竭和严重的环境问题[6-8],开发海洋能源能够缓解能源危机、减少环境污染并促进经济发展[9-10].
本文全面论述波浪能量采集、海洋无人机电系统和基于波浪能量采集的自供能海洋无人机电系统的研究进展,讨论目前自供能海洋无人机电系统面临的关键挑战并进行展望,为解决海洋无人机电系统长期有效供能难题提供多维度参考,推动自供能传感、控制与驱动等技术的发展与应用,助力海洋无人机电系统航向深海远海.
1 波浪能量采集及自供能海洋无人机电系统研究进展
海洋蕴涵丰富的能源,包括太阳能、风能、波浪能和潮汐能等,与太阳能和风能相比,波浪能具有功率密度大、可持续性高且分布广等特点[11],能为海上设备提供动力支持以及大陆电网传输电能[12].如表1 所示,中国拥有300 万平方千米的海域,中国波浪能理论储量为5.74×1011kW[13].发展波浪能技术具有广阔的应用前景和深远意义.
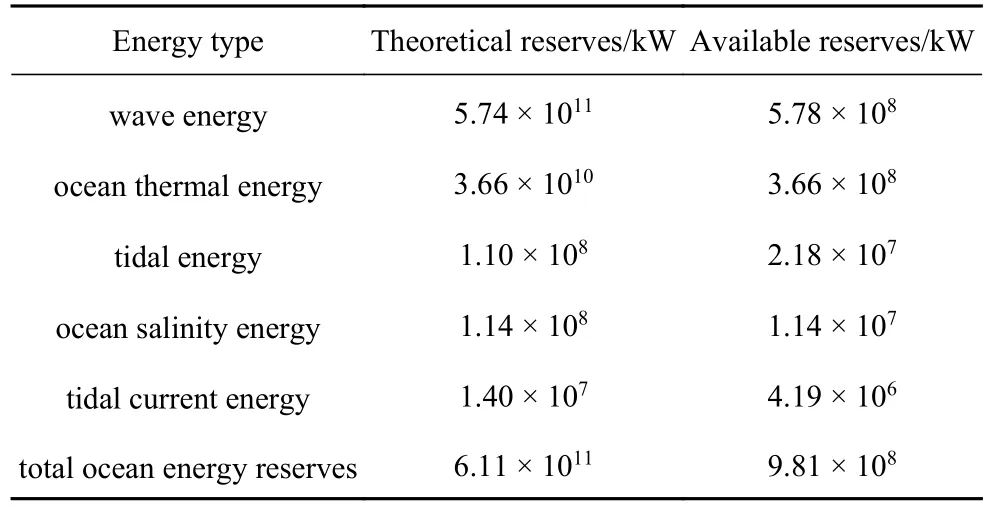
表1 中国海洋能资源储量[13]Table 1 China's marine energy resources reserves[13]
海洋波浪能采集装置按驱动方式一般可分为离岸越浪式、振荡水柱式和振荡体式等(图1),这3 种驱动机制是将波浪能量转化成线性或者旋转形式的机械能,然后通过机电转换机制转化为电能[14-15].波浪能转化为电能可分为3 个阶段,第1 阶段是将波浪能转换为势能,第2 阶段是将势能转换为动能,最后阶段是将动能转化为电能[16].

图1 3 类波浪驱动机制Fig.1 Three types of wave driving mechanisms
机电转换机制在波浪能量采集中具有重要作用.本节将基于机电转换机制论述波浪能量采集方法,包括电磁波浪能量采集方法、压电波浪能量采集方法、基于摩擦纳米发电机的波浪能量采集方法和复合机电转换机制波浪能量采集方法.
1.1 电磁波浪能量采集
电磁波浪能量采集通过波浪直接或间接驱动系统中的永磁体与线圈产生相对运动从而发电[17].惯性摆等易被低频激励激振的机构被用于俘获波浪能量.扇形质量摆集成在海洋浮标中,可以有效采集低频波浪能量,最大输出电压可达15.9 V,输出功率为0.13 W[18].Li 等[19]设计了一种全方位波浪能量采集系统,通过直立式水平摆结构俘获波浪能量,其输出电能波形能够反映波浪状况,可作为自供能传感器进行海洋波浪监测.
波浪激励不规则、频率低,一般需要通过机械机构将波浪激励转换为旋转运动提高机电转换效率和输出电能品质[20].Liang 等[21]提出了一种具有机械运动整流功能的波浪能量采集器,通过齿条齿轮机构和单向轴承组合,将波浪激励整流为单向旋转运动.Pan 等[22]设计了一种电磁波浪能转换器(图2(a)),通过内螺纹套筒和外螺纹驱动轴将海浪的垂直运动转化为旋转运动.Chen 等[23]开发了一种混合波-流能量转换器(图2(b)),通过锥齿轮、单向轴承等组合将海面波浪和海下洋流能量同时转换为电能,实验结果表明这种混动提高了电力输出.波浪激励幅度大,也可以直接驱动相对简单的线性电磁感应结构发电,但输出功率比较低.
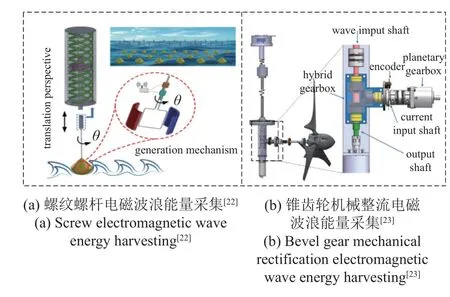
图2 电磁波浪能量采集Fig.2 Electromagnetic wave energy harvesting
波浪激励驱动机构、机械整流机构和电磁感应结构设计对电磁波浪能量采集性能具有关键影响.一般电磁波浪能量采集系统输出功率较高,但体积较大,结构相对复杂和成本较高.
1.2 压电波浪能量采集
压电波浪能量采集利用正压电效应将机械能转换为电能,波浪直接或间接驱动压电材料变形导致电偶极矩变化产生电压[24].压电能量采集功率密度较高,尤其设计很灵活,因此,压电能量采集已经成为将机械能转换为电能的主要方式之一[25-26].压电波浪能量采集一般采用压电悬臂梁、压电薄膜等压电结构.
压电悬臂梁在激励频率与其固有频率接近时才能产生较大振幅从而输出较高功率[27-30].Chen 等[31]提出了一种压电波浪能量采集器,由浮体、齿轮升频机构和压电悬臂梁阵列组成(图3(a)).Viet 等[32]通过弹簧质量系统将波浪运动转换为机械振动,然后通过杠杆机构放大作用于压电材料从而发电.磁力耦合也常用于驱动压电悬臂梁.Shi 等[33]提出了一种多向超低频压电振动能量采集器.波浪激励球滚动,球滚动驱动环旋转,环通过磁力驱动压电悬臂梁振动发电.He 等[34]设计了一种圆柱和锥形浮体结构的压电波浪能量采集器,浮体低频上下运动通过磁力耦合驱动压电悬臂梁以较高频率振动发电.
Du 等[35]在振荡水柱式波浪能量采集器中采用压电膜替代传统的空气涡轮机(图3(b)),压电膜在脉动气压作用下变形并产生电能.Chen 等[36]开发了一种压电波浪能量转换器,由浮体、升频机构和压电膜组成(图3(c)),通过柔性压电膜振动发电,压电膜谐振频率是波浪激励频率的6 倍,从而可以提高压电膜的机电转换效率.
压电波浪能量采集方法具有结构简单、能量密度高和成本低等优点.然而目前压电波浪能量采集器输出功率仍然较低.可以通过机械调制方式将低频波浪激励转换为高频激励,匹配压电能量采集器从而提高输出功率.非线性系统也可以被用于俘获宽频波浪能量[37].此外,压电能量采集设计灵活,比如将压电材料与太阳能水凝胶集成(图3(d)),可以提高海水净化速度[38].压电材料将波浪能转化为电能,重新激活水凝胶中的水,与非压电水凝胶海水净化器相比,活化效果提高了23%以上.
1.3 基于摩擦纳米发电机的波浪能量采集
摩擦纳米发电机(triboelectric nanogenerator,TENG)基于接触起电和静电感应将机械能转换成电能[39-41].摩擦纳米发电机在低频工况下表现出更高的能量转化效率,具有高功率密度、高效率、低重量和低制造成本的优点[42-43].摩擦纳米发电机具有垂直接触分离、水平滑动、单电极、独立层等4 种工作模式[44].
虽然摩擦纳米发电机相比压电和电磁更适应低频激励,但是面对极低频率波浪激励工况,仍然需要升频提高机电转换效率.Jung 等[45]设计了一种倍频圆柱形摩擦纳米发电机采集低频波浪能量(图4(a)),在0.33 Hz 波浪频率下,峰值功率密度为6.67 W/m3,并验证了具备为海洋观测系统供电的能力.Zhang等[46]研制基于摩擦纳米发电机独立层模式的光栅型波浪能量采集器,可以有效俘获低频波浪能量.Gao 等[47]设计了一种陀螺结构的摩擦纳米发电机,用于采集低频波浪能量.内部和外部发电单元可以在不同方向上独立运动互不干扰发电.在6 m/s2的加速度激励下,内部和外部发电单元的开路电压分别为730 V 和160 V.

图4 基于摩擦纳米发电机的波浪能量采集.(a)滚筒式摩擦纳米发电机波浪能量采集[45];(b)仿生蝴蝶式摩擦纳米发电机波浪能量采集[48];(c)仿生莲花式摩擦纳米发电机波浪能量采集[50];(d)环面球摩擦纳米发电机波浪能量采集[51]Fig.4 Wave energy harvesting based on TENG.(a)Wave energy harvesting based on cylindrical TENG[45];(b)Wave energy harvesting based on bionic butterfly TENG[48];(c)Wave energy harvesting based on bionic lotus TENG[50];(d)Wave energy harvesting based on toroidal sphere[51]
波浪激励随机不规则,很多学者提出了多方向波浪能量采集设计.Wang 等[48]提出了一种仿生蝴蝶翅膀摩擦纳米发电机(图4(b)),仿生叶片具有阻力放大效应,可有效俘获多方向波浪能量.在1.25 Hz的频率下,可以产生400 V 和2.9 μA 的电学响应.Qu 等[49]设计了一种球形偏心结构摩擦纳米发电机,球壳内设置了十二面体结构,用于全向波浪能量采集,有效地将不同方向波浪能量转换为电能,并设计了能量管理电路处理和存储产生的电能.Wen 等[50]提出一种花状的摩擦纳米发电机(图4(c)),由6 个花瓣摩擦纳米发电机和2 个花蕊摩擦纳米发电机组成,可以采集6 个自由度的动能.Liu 等[51]提出一种环面结构的摩擦电纳米发电机(图4(d)),由一个内球和一个环面壳组成,多向随机波浪激励驱动球在圆环壳中旋转摩擦发电.
摩擦纳米发电机具有高能量转化效率、超高输出电压及丰富的材料来源等优点,且由于摩擦纳米发电机主要由高分子材料制成,具备优良的抗腐蚀能力,可以在更小的空间和更简单的结构中将各种波浪能转换为电能.高分子材料作为摩擦纳米发电机的组成部分可能会对海洋环境造成污染,采用绿色环保可降解的摩擦纳米发电机材料,在设计波浪能量采集器时系统化考虑回收可以减少海洋污染.
1.4 复合机电转换机制波浪能量采集
将多类机电转换机制复合可以利用不同机电转换机制的特性,增加输出电能使用灵活性和输出功率[52-54].摩擦纳米发电机内阻高,输出电压高、电流小;电磁发电机内阻低,输出电压低、电流大.摩擦纳米发电机和电磁发电机复合常用于波浪能量采集[55].Ouyang 等[56]设计了一种电磁与摩擦纳米发电机波浪能量采集器(图5(a)),永磁球在波浪激励下运动通过电磁感应发电,并通过磁力耦合作用激励摩擦纳米发电机接触和分离发电.Sun 等[57]提出了一种摆动平移复合发电机采集海岸线上的波浪能量(图5(b)),波浪激励驱动滑轨中的永磁体滑动,电磁感应发电,同时驱动多层摩擦纳米发电机接触和分离发电.Wang 等[58]提出一种拓扑结构的电磁与摩擦纳米发电机波浪能量采集器,摩擦纳米发电机折叠形成4 个腔室,通过独立层模式发电.电磁发电机的永磁体嵌入靠近腔壁的折纸上,而线圈设置在腔壁上,能够在宽频波浪激励下有效工作.Han 等[59]提出一种双面绒和海尔贝克结构的复合发电机,利用绒毛增强摩擦纳米发电机的性能,海尔贝克增强磁场强度.
压电能量采集器、摩擦电纳米发电机和电磁能量采集器复合使用可以提高空间利用率[60].一种基于双摆结构的复合波浪能量采集器被提出,包括一个电磁发电机、两个压电发电机和两个折纸结构摩擦纳米发电机,3 类机电转换机制合理布置提高了空间利用率[61].压电能量采集器、摩擦电纳米发电机和电磁能量采集器分别布置在系统表现出最大应变、最大接触面积和最大位移的地方,可以充分利用它们在结构空间中的特性[62].几类波浪能力采集器在相应激励下的输出功率或功率密度列与表2.
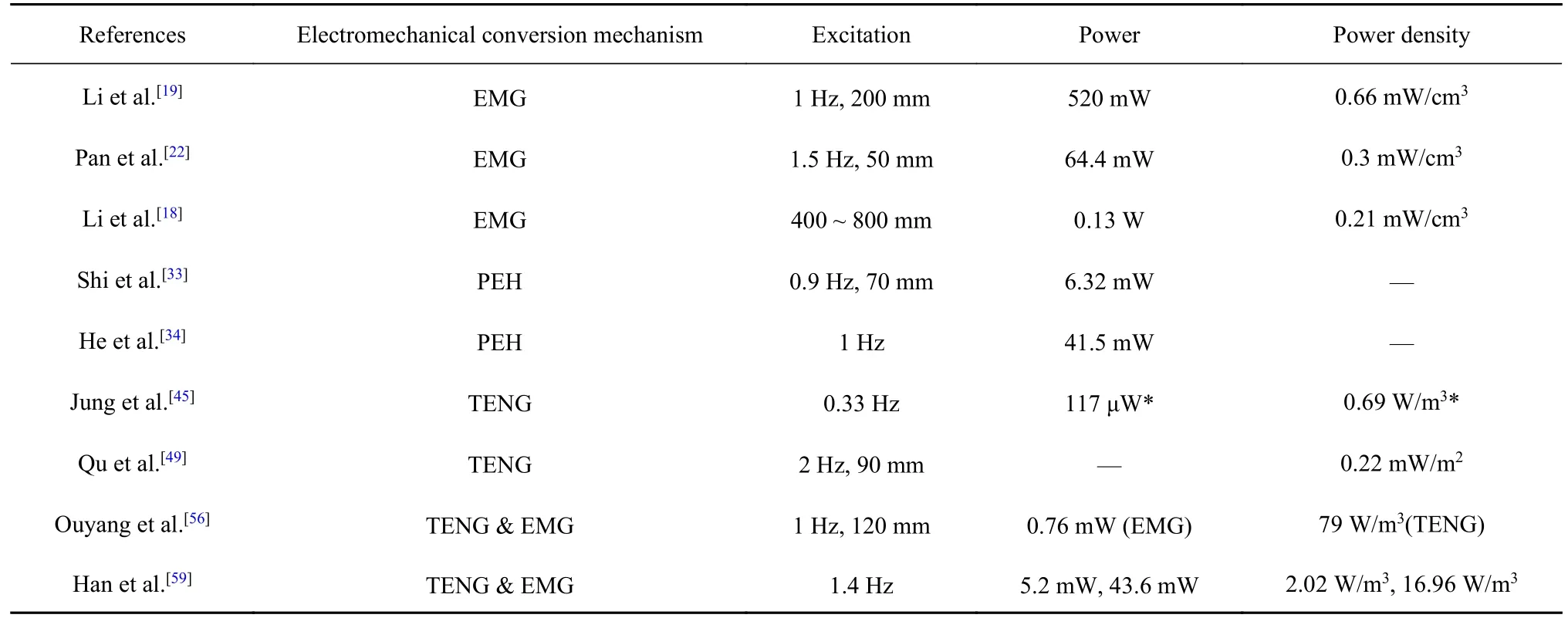
表2 波浪能量采集方法比较Table 2 Comparison of wave energy harvesting methods
1.5 自供能海洋无人机电系统探索
海域辽阔,长期有效供能是制约海洋无人机电系统探索深海远海的瓶颈难题.海洋充电基站或供电船等为无人机电系统补充电能,但是这些设备设施一方面实施难、成本高,另一方面也限制了无人机电系统的灵活性.海洋蕴涵丰富的能源,包括太阳能、风能、波浪能和潮汐能等.太阳能发电技术虽然已经商业化,发展较为成熟,但太阳能发电技术受地区、昼夜影响较大,同时,太阳能电池板通常需要较大的安装面积,这将在一定程度上增加海洋无人机电系统的体积,不利于小型化.与太阳能和风能等相比,波浪能具有功率密度大、可持续性高和分布广等特点.将波浪能转换为电能,可以实现海洋无人机电系统的自供能传感、控制与驱动,有望破解海洋无人机电系统供能瓶颈难题.为海洋无人机电系统供能的波浪能量采集器既需要满足功耗要求也要降低对海洋无人机电系统工作的影响,需要兼顾构型和输出功率.
1.5.1 自供能传感器
海洋浮标传感器电源不足可能导致其监测海洋数据在时间上不连续,不能全面实时反映海洋状况[63].浮标所处的海洋环境具有风能、太阳能和波浪能等.波浪能量高度集中在海面以及接近海面的水层,而海洋浮标分布的位置正好位于此范围内,波浪能更自然地进入海洋浮标.海洋浮标可以高效地采集波浪能量并应用其能源为传感器供能[64-65].
Wang 等[66]提出了一种可集成于浮标内部的可堆叠摩擦纳米发电机,波浪激励浮标在水平面上摆动从而推动PTFE 小球滚动发电,能为温度传感器、PH 传感器、盐度传感器等海洋环境监测传感器供电.Wang 等[67]还提出一种内置于海洋浮标的波浪能量采集器,实验数据表明,波浪能量采集器能产生1.4 W 的平均功率,为大多数小功耗传感器供能.Liang 等[68]设计了基于摩擦纳米发电机用于水位报警的自供能浮标.摩擦纳米发电机发电单元使用电荷激发模块,从而大大增强了球形摩擦纳米发电机的输出性能,输出电流和输出功率可达到15.09 mA 和24.48 mW,成功实现了自供能水位报警功能.
Xie 等[69]设计了一种振荡浮标波浪能量采集器,圆柱形浮标倒立安装俘获波浪能,浮标上下运动驱动电磁发电机单向旋转发电,产生的电能存储在超级电容中,为跨海大桥健康状态监测传感器供电.Zhao 等[53]提出一种机械智能电磁-摩擦复合波浪能量采集器,如图6 所示,实验结果表明,该能量采集器能够在超低频下有效工作,可以在6 min 内将0.47 F 电容器充电至5 V,从而实现自供能PH 值、光照度和温度等环境监测及无线信息传输.

图6 自供能海洋环境传感器[53]Fig.6 Self powered marine environmental sensors[53]
1.5.2 自供能航行器/机器人
波浪滑翔机由水面上的浮子和水面下的滑翔机组成.水面浮子在波浪激励下通过系绳拉扯水下滑翔机,同时水下滑翔机上可翻转机翼发生翻转,产生一直向前的驱动力.Tian 等[70]提出了一种混合滑翔机,混合滑翔机由波浪能和太阳能供能,可根据不同需求在海洋表面或垂直剖面上滑行.
波浪能量采集器可以安装在水下航行器/机器人的内部或者外部.安装在外部的波浪能量采集器能获得较大波浪激励,但波浪冲击较大以及导致外部阻力增加.安装在内部的波浪能量采集器具有更高的可靠性和稳定性.Townsend 等[71]提出了一种用于水下机器人的波浪能量采集系统,波浪激励框架飞轮陀螺响应实现从波浪能到电能的转换.水下测试表明,在波浪高度为0.1 m 的情况下,该系统的最大瞬时发电功率为3.58 W.
自供能水下航行器/机器人可通过切换工作模式(俘能模式和运动模式)提高系统效能.Li 等[72]设计了集成波浪能量采集系统的自主水下航行器(图7(a)),通过垂直收放的浮子实现俘能模式与运动模式的切换,浮子通过缆绳与自主水下机器人主体相连接,当波浪激励浮子上下运动时,浮子带动缆绳驱动自主水下机器人内置的发电机发电.实验表明,水下航行器的电池充满电所需时间为2.65 d,充满电的水下航行器可以航行20 km.Chen 等[73]设计了一种装备在海洋机器人的可折叠翼波浪能量采集系统(图7(b)),可在俘能模式与机器人模式之间切换,可折叠翼波浪能量采集系统的最大俘能功率到达2.6 W,能满足很多低功耗应用需求.
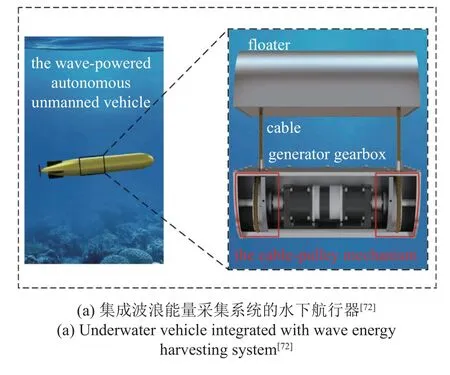
图7 自供能航行器/机器人Fig.7 Self-powered vehicles

图7 自供能航行器/机器人(续)Fig.7 Self-powered vehicles (continued)
2 海洋无人机电系统研究进展
海洋环境传感器、航行器/机器人等无人机电系统可用于海洋军事侦察与测绘、海洋环境资源生态探测和监测、海洋作业设备设施状态监测等,有益于海洋生态保护、海洋经济发展和海洋权益维护[74-75].如图8 所示,海洋环境机电系统根据能否自主运动可分为传感器和航行器/机器人.航行器/机器人按照作业区域可以分为水面航行器和水下机器人.水下机器人按控制方式可分为有缆水下机器人和自主水下机器人.此外,仿生软体机器人具有很好的环境友好性、生物交互性和低成本优势,也引起了广泛关注[76].
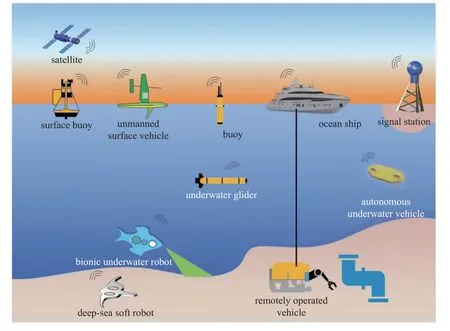
图8 海洋环境无人机电系统Fig.8 Unmanned electromechanical systems in marine environments
2.1 海洋环境传感器
海洋是地球气候调节、碳循环不可或缺的部分,海洋监测对预测大气变化、可持续利用海洋资源具有重要作用[77].海洋传感器可以与船舶、浮标、水下设备和海上平台集成,收集信息以服务防灾[78]、海洋科考[79]、船舶设计及导航[80]、海洋监测[81]等.
浮标是指浮在海面上的标志物,传统上用于警示危险、指引航道.现代浮标与雷达、船舶、卫星和陆基监测节点可组成全覆盖的海洋信息观测系统[82].国际生物地球化学Argo 项目组目前正在建立一个全球多学科海洋观测网络,该网络由自动Argo浮标组成,配备了广泛的生物地球化学传感器,将提供改进海洋条件和生态系统健康的模型和预测所需的海洋环境信息[83].
光纤传感器具有抗电磁干扰、耐极端温度和压力、重量轻、传输速率高、体积小和灵活等优点,在海洋环境和海洋结构健康监测领域受到广泛关注.Shen 等[84]研制一种船载光子计数激光雷达,利用光子计数技术实现了高精度后向散射信号测量,具有观测深层海水光学特性的潜力.Wang 等[85]采用全光纤海水温度和深度传感阵列来获取海水温度和深度剖面.通过对光纤光栅传感器封装结构的研究,解决了传统光纤光栅传感器在测量海水温度时存在的测量误差问题.
水下软传感器是适用于水下小型机器人传感任务的理想选择.与刚性传感器相比,它具备更高的灵活性和可靠性,并能自主完成自组装和自驱动的功能.由于其低能耗的特性,软传感器在水下环境中表现出了更为出色的性能,具有广阔的应用前景[86].
电池电量有限阻碍了海洋环境传感器大规模部署.随着微/小型电子产品能耗降低,使得海洋能量采集技术可以满足海洋传感器等低功耗用电设备的需求,摆脱电池电量和线缆的限制.
2.2 无人水面航行器
无人水面航行器(unmanned surface vehicle,USV)是无需或者少量人力干预的水面航行器,能灵活布置在海洋不同区域,具有可靠、快速和机动性强的特点,可以执行监测海洋参数、排查鱼雷和海岸巡逻等各种任务[87-88],极大地降低了人类风险并提高了效率.Carlson 等[89]提出经济且便于携带的自主水面航行器(图9(a)),在危险环境中可以测量水深和海流.Wang 等[90]设计了一支自主无人水面航行器舰队(图9(b)),每一个无人水面航行器具有规则形状利于相互连接,并设计一种十字型推进器进行推进,此设计可构成海洋表面移动平台.近年来,随着应用环境愈加复杂,人工智能、大数据技术的迅速发展,无人水面航行器的智能化水平不断提高[91-92].比如,Wang 等[93]提出了统一框架有机结合了路径规划和导航系统,可以实现无人水面航行器在受限航道/水域中沿着最佳安全路径自主驾驶.Meyer 等[94]探讨了近端策略优化的潜力,使无人水面航行器能够实现遵循已知期望路径的同时避免与沿途其他船舶发生碰撞.

图9 无人水面航行器.(a)小型自主水面航行器[89];(b)自主水面航行器舰队单元[90];(c)振动驱动两栖机器人[95];(d)仿䲟鱼两栖机器人[96]Fig.9 Unmanned surface vehicles.(a)Small autonomous surface vehicle[89];(b)Fleet unit of autonomous surface vehicle[90];(c)Vibration driven amphibious robot[95];(d)A remora-like amphibious robot[96]
在空中、海面和海下等多工况作业的跨介质航行器/机器人可以进一步提高航行器/机器人的机动性.Wang 等[95]开发了一种小型两栖机器人(图9(c)),通过振动驱动的运动机制实现两栖运动,避免了传统两栖机器人结构复杂问题.Li 等[96]设计了一种跨越空中水下的仿生䲟鱼机器人(图9(d)).仿生䲟鱼机器人具有被动变形的螺旋桨,能够实现在0.35 s内快速穿越水空边界.
2.3 有缆水下机器人
有缆水下机器人,也可称之为遥控水下机器人(remotely operated vehicle,ROV)是通过缆线与海上操作平台连接的水下机器人.有缆连接使得水下机器人获得源源不断的能源,使其能装备较大的、需要较高功率的操作设备,从而功能更强大,比如采集生物样本、开采海底矿产和绘制海底三维模型等[97].但海上操作平台也面临能源补给困难、供能不足的问题,波浪能量采集器可以为海洋操作平台供能,提高其续航能力,减少维护成本.Chaloux 等[98]开发一种鱼类采样有缆水下机器人(图10(a)),通过推进器的强大吸力捕获鱼类.切割有缆水下机器人被研制用于开采位于海底火山附近的块状硫化物(图10(b)),切割有缆水下机器人由位于船舶上的作业员远程控制4 m 宽刀片切割目标物[99].有缆水下机器人等能够检查和维护从深海延伸出来的天然气或石油管道(图10(c)),并追踪石油矿场的石油泄漏、海底天然气管道的气体泄漏,保护水下生态系统[100].
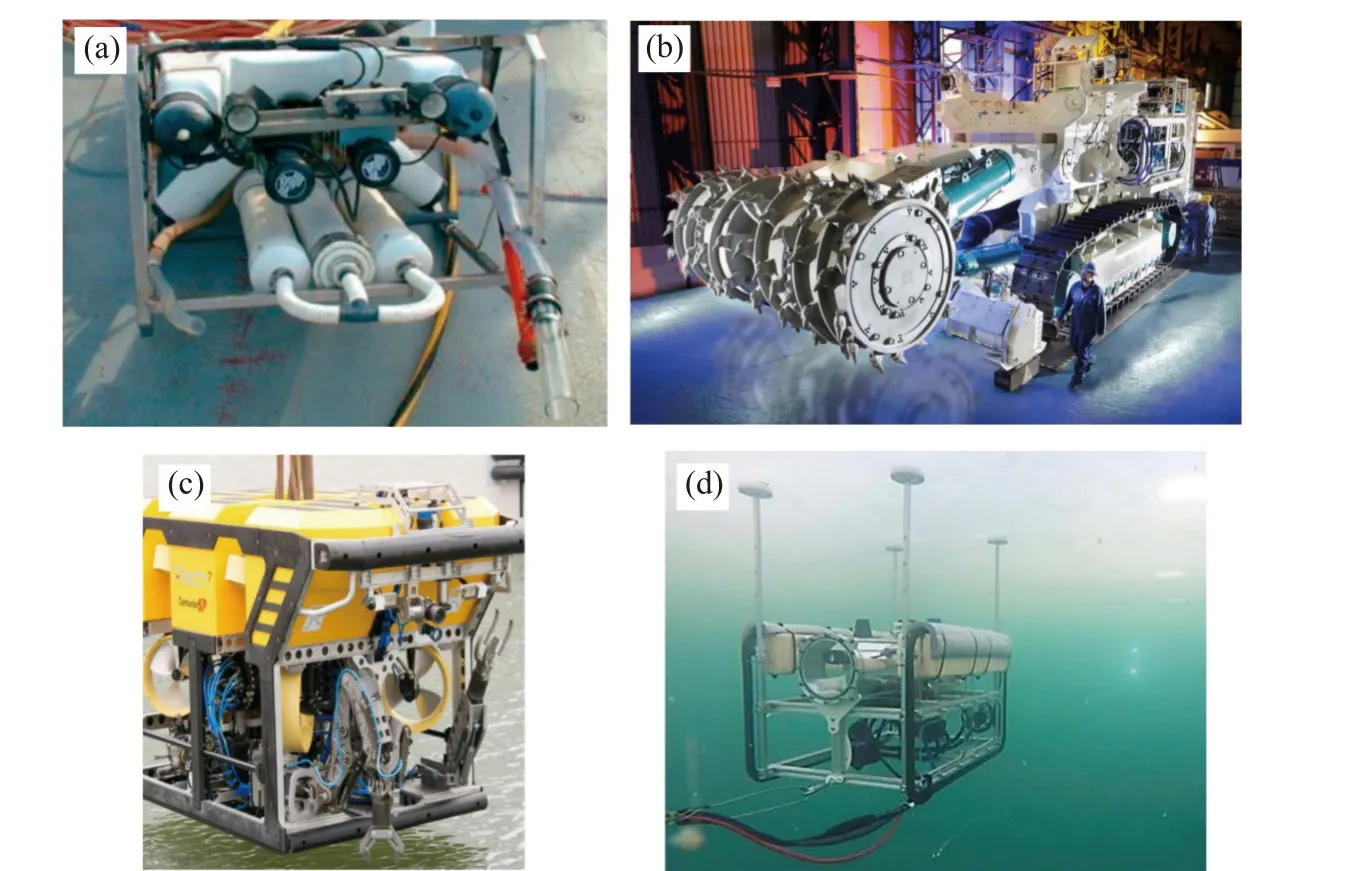
图10 有缆水下机器人.(a)用于鱼样采集有缆水下机器人[98];(b)切割型有缆水下机器人[99];(c)探测有缆水下机器人[100];(d)具有光学定位系统的有缆水下机器人[104]Fig.10 Remotely operated vehicles.(a)Remotely operated vehicle for fish sampling[98];(b)Cut-out remotely operated vehicle[99];(c)Remotely operated vehicle for detection[100];(d)Remotely operated vehicle with optical positioning system[104]
线缆与水下障碍物碰撞、线缆惯性等会影响水下机器人的可操作性[101].保持线缆拉力使之保持直线状态可以避免缠绕[102].Rahimuddin 等[103]在有缆水下机器人顶部设置浮力结构,在底部加重,浮心在重心的正上方且浮心与重心的距离较远保证了水下机器人良好的稳定性.Lund-Hansen 等[104]设计了具有光学定位系统的便携式有缆水下机器人(图10(d)),用于测量和采样.Xu 等[105]提出了用于有缆水下机器人的定点吸附器,提高了有缆水下机器人操作效率.Gladkova 等[106]使用里程计平均数据推算路径实现了有缆水下机器人的高精度定位.
2.4 自主水下机器人
自主水下机器人(autonomous underwater vehicle,AUV)是集先进制造技术、智能材料、水下无线通讯和高计算能力计算机等技术为一体的自主导航和决策的水下机器人[107-108].自主水下机器人摆脱了线缆限制,能探索更深更远,但需要自带能源装备或者增加自供能设备来支撑其航行.自主决策的功能使水下自主机器人能适应复杂的水下环境,提升稳定性和可靠性[109].
Fernandez 等[110]设计了一种自主水下机器人(图11(a)),可以检查和探测淹没的矿井隧道网络.德国智能人工智能中心[111]研制了名为“DAGON”的自主水下机器人(图11(b)),DAGON 是双体船式,包括两个高清摄像头和5 个推进器,主要用于创建视觉地图和即时定位.Iscar 等[112]开发了开源、低成本的自主水下机器人用于深海的光学探测与绘制海洋地图.
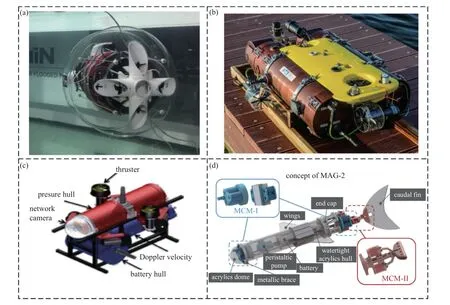
图11 自主水下机器人.(a)矿井隧道探测自主水下机器人[110];(b)DAGON[111];(c)DaryaBird[115];(d)基于线性肌肉调节的自主水下机器人[117]Fig.11 Autonomous underwater vehicles.(a)Autonomous underwater vehicle for mine tunnel detection[110];(b)DAGON[111];(c)DaryaBird[115];(d)Autonomous underwater vehicle based on linear muscle regulation[117]
自主水下机器人的推进器方面进展迅速,具有更强的推进力、机动性以及狭小空间作业能力.Gu 等[113]提出了一种球形自主水下机器人,其具有矢量水射流和螺旋桨推进器的混合推进装置,混合推力器的最大推力比单推进器增加了2.27 倍.Wang 等[114]提出了一种盘状自主水下机器人,其由4 个螺旋桨和浮力调节系统组成的推进系统能实现高机动性.
水下机器人可以通过变换工作模式和状态来提高工作效率和增强续航能力.Hidaka 等[115]设计了一款名为“DaryaBird”的水下机器人(图11(c)),实现了模块化易于实现多种探测功能,且能在线缆连接的情况下工作.中国科学院沈阳自动化研究所开发了一类远程自主水下机器人“Explorer 1000 AUV”,其有两个高精度可变浮力系统,因此它可以执行两种工作模式: 自主水下机器人在一定固定位置进行往复剖面观测的定点观测模式,以及自主水下机器人在多个观测点巡航并在每个点进行定点观测的巡航观测模式[116].Wang 等[117]提出一种用于自主水下机器人的线性软波纹腔肌肉致动器(图11(d)),其可驱动浮力调节机构和尾部的转向机构,降低结构的复杂性,增大内部可利用空间.
自主水下机器人主要用来执行探测任务,传感器以及探测技术显得尤为重要.为了节省设计中的优化时间,从生物中获取灵感来解决工程问题是较好的设计方法.
2.5 仿生软体机器人
仿生软体机器人具有很好的环境友好性、生物交互性和低成本优势,在海洋环境具有广泛的应用前景[118-119].
仿生机器鱼可以通过身体和尾鳍实现游动(图12(a))[120-121].Zhang 等[122]提出两段尾鳍推进方法,与现有单一尾鳍设计相比,两段尾鳍推进在稳定性和可控范围方面具有优异性能.Li 等[123]提出了一种多尾全方位水下机器人,结合了鱼类、青蛙、章鱼、鱼群等不同运动模式.Christianson 等[124]提出了一种鳍状介质弹性体致动器的设计,具有驱动应变大、响应速度快、噪音低和效率高等特点.Shintake 等[125]设计了一种基于介电弹性体驱动器的仿生软体机器鱼,通过身体和尾鳍推进游动.Li等[126]受深海狮子鱼启发,开发了一种深海软体机器人(图12(b)),将电子设备封装在硅胶基质中,减小深海高压的影响,使用重量轻的介电弹性体作为致动器,证明了软材料在极致压力下正常工作的巨大潜力.
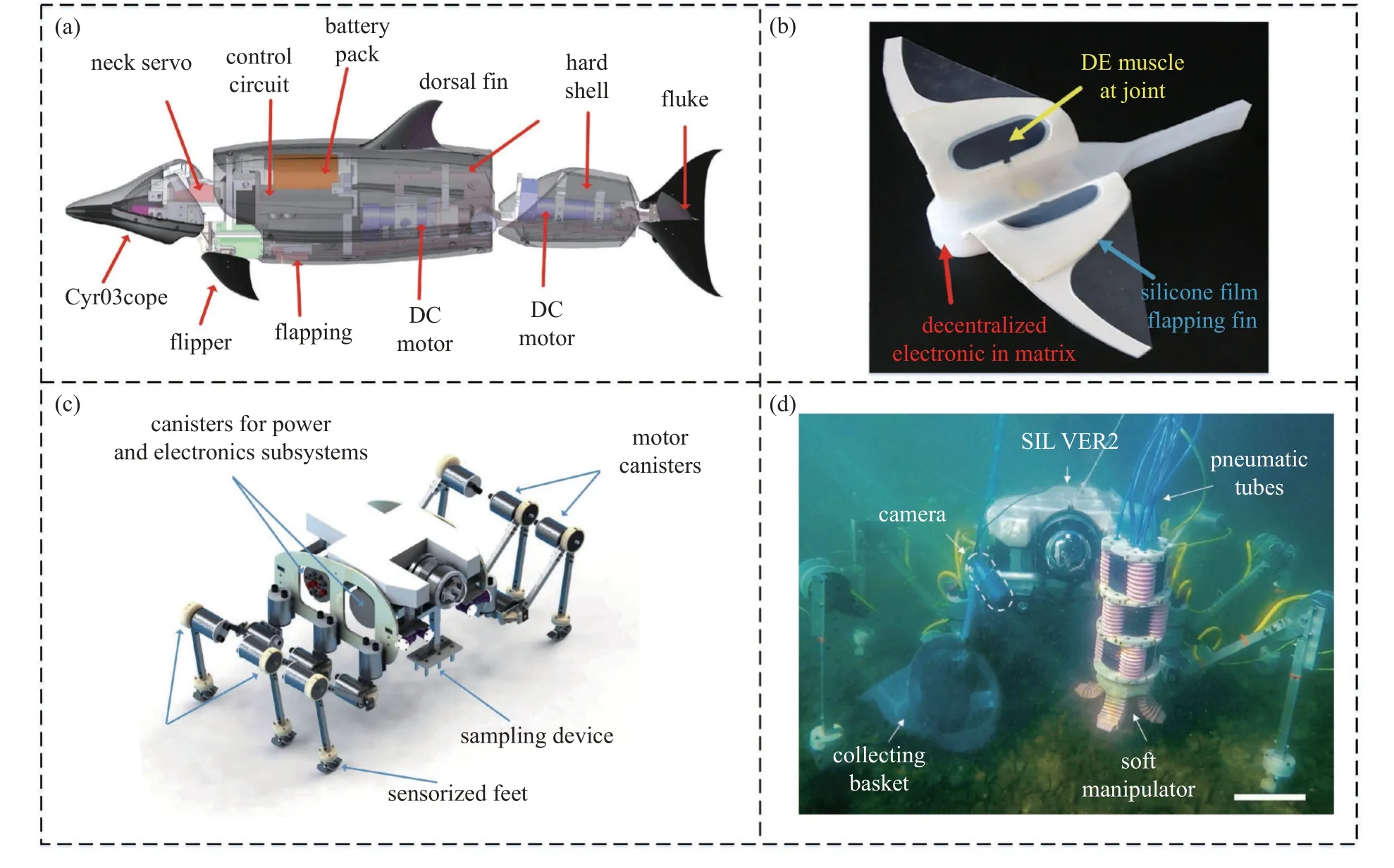
图12 仿生软体机器人.(a)仿生机器鱼[121];(b)深海软体机器人[126];(c)仿生水下多足机器人[130];(d)软体机械手[131]Fig.12 Biomimetic soft robot.(a)Bionic robotic fish[121];(b)Deep sea soft robot[126];(c)Bionic underwater multi-legged robot[130];(d)Soft manipulator[131]
此外,也有一些其他方式被用于软体机器人驱动.Armanini 等[127]受鞭毛生物启发设计了水下推进器,通过简单旋转驱动产生推进力.Zhang 等[128]采用柔性磁性复合材料制作驱动器,通过磁场驱动,实现软体机器人的游动和抓取等功能.Ren 等[129]提出了一种仿水母软体机器人,通过变化磁场驱动磁性复合弹性体在机体周围产生受控流体,实现操作和运输等功能.
为了提高仿生软体机器人的作业能力,Picardi等[130]受到底栖爬行动物启发提出了一种仿生水下多足机器人(图12(c)),可以在0.5~12 m 深度范围内穿越不规则地形精确接近目标并实施干预.Liu等[131]介绍了一种协同机器人系统(图12(d)),通过设置底栖腿机器人作为移动基座,显著扩展软机械手的工作空间,在不破坏海底环境的情况下精确接近和采集目标物.Stuart 等[132]设计了一种温和抓取水下物体的柔顺指尖吸力抓取器,温和吸入流提供了一种改变接触条件的方法.折纸机构具有易设计、可灵活重构的特点.折纸机构与不同的致动器集成能实现变构型以及运动传感等功能,模块化软折纸能为多功能、智能软机器人设计提供有效的解决方案[133].
3 关键挑战与展望
波浪能量采集技术的发展对提高海洋环境传感器、航行器/机器人等无人机电系统作业时长与范围具有重要意义,也有很多报道验证了基于波浪能量采集的自供能海洋无人机电系统的可行性.然而,目前仍然面临着许多的不足,关键挑战如下.
(1)现阶段大部分小型波浪能量采集器的输出功率还较低,仅能为微/小型传感器等供电,还不能满足远距离信息传输、图像视频采集、水下机器人、多功能集成系统等方面应用的功耗需求.
(2)大部分波浪能量采集研究还只处于实验室阶段,环境适应性、系统可靠性等方面的考虑较少,强浪冲击、海洋环境恶劣等严重影响波浪能量采集器可靠性的关键难题还未得到很好解决.
(3)波浪能量采集器与电池相比能量密度较低,无人机电系统需要较大空间配置波浪能量采集器.但是,较大尺寸的能量采集器会导致更大运动阻力,影响航行器/机器人的运动灵活性.
针对以上关键挑战,提出如下展望.
(1)整流调控可以将低频不规则波浪激励转换为可控的力、运动或其他能量形式,整流调控使得系统容纳更加复杂的激励输入;整流调控使得直接作用于换能器的激励更加匹配,不仅可以大幅提高机电转换效率,也可以提高系统的稳定性和可靠性.但整流调控也增加了系统的复杂性、体积和成本.简单高效整流调控设计方法有待进一步研究.
(2)波浪能、风能和太阳能等多源能量采集是提高输出功率密度和输出电能时空互补的有效方法.多源能量采集协同增强、混合电力电路处理和电能存储、多源能量互补转换与利用等需要全面系统的研究.
(3)波浪能量采集系统如果与航行器/机器人集成需要具有行动灵活性,因此驱动方式只能选择漂浮振荡体式.目前国内外关于漂浮振荡体式波浪能量采集的研究主要侧重于功能材料、发电模式和结构设计等方面,动力学与控制有待深入研究.自供能航行器最核心的问题是能量采集如何满足系统能耗需求,既需要提高波浪能采集输出功率,也需要降低系统能耗.变构型使得俘能模式和运动模式各自具有适合结构和形状可以提高系统效能,但如何不依赖或少依赖电学元器件实现简单、可靠、低能耗构型调控有待探索.
4 总结
本文系统总结了波浪能量采集研究进展,介绍了海洋无人机电系统,论述了自供能海洋无人机电系统的研究现状、关键挑战与发展方向.随着人类探索海洋世界的兴趣越来越强,需要具有超长续航能力的航行器/机器人开展深海远海探索和作业.长期有效供能是制约海洋无人机电系统作业时长与范围的瓶颈难题.波浪能量采集技术的发展对提高海洋环境传感器、航行器/机器人等无人机电系统续航能力具有重要意义,但目前波浪能量采集技术还不能满足海洋航行器/机器人的供能需求以及适应复杂恶劣海洋环境,波浪能量采集系统与航行器/机器人的集成设计方法也有待深入研究.本文针对自供能海洋无人机电系统开发面临的关键挑战提出了展望,为波浪能量采集研究及自供能航行器/机器人设计提供参考.
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
现代仪器与医疗(2021年1期)2021-06-09
当代陕西(2020年24期)2020-02-01
压电与声光(2019年1期)2019-02-22
小哥白尼(趣味科学)(2018年12期)2018-12-18
铜仁学院学报(2018年6期)2018-07-05
计算机测量与控制(2017年6期)2017-07-01
计算机测量与控制(2017年6期)2017-07-01
中国航海(2014年1期)2014-05-09
振动、测试与诊断(2014年6期)2014-03-01