智能三相充电桩系统的开发
2023-11-14 08:58黄月容邱杰晋韦创炜邹丽玲莫英观庞寿全
电子制作 2023年20期
黄月容,邱杰晋,韦创炜,邹丽玲,莫英观,庞寿全
(玉林师范学院,广西玉林,537000)
0 引言
我国大部分传统的充电桩采用恒压、恒流模式。处于恒压、恒流模式的充电桩所需充电周期较长、效率低下,容易给用户带来不良的使用体验;恒流模式的充电桩还易使蓄电池产生析气现象,对电池造成不可逆转的伤害。传统的充电桩覆盖面率低、所需充电时间长、效率低下等问题,导致能源供给的步伐无法跟上当今新能源汽车数量增长的脚步,此情况严重不符当今社会所提倡的绿色发展理念。因此,研制出一款智能、安全、高效的智能充电桩具有非常重要的社会意义。
1 系统总体设计
本系统采用创新型的 Vienna 整流电路对三相电进行AC-DC 变换作为提供给整个装置直流电能的能源供给装置。全套装置由 TMS320F28335 单片机为主控模块,外加智能安全检测模块、OLED 液晶屏显示模块、功率因数校正模块和辅助电源模块组成[4]。在整个系统进行开始工作前,可对新能源汽车的剩余电量进行自动化检测,通过将剩余电量采样给单片机判断其是否需要进行充电以及所需充电时间的长短。若检测到汽车的剩余电量低于新能源汽车电池所需电量的预设值时,单片机反馈给充电桩相应的信息后自动对汽车进行充电。同理,当充电结束,经过单片机的反馈,充电桩可自动断开对汽车蓄电池的充电[5]。系统在工作期间将所需显示给用户的参数在液晶屏上面显示,用户再根据需要进行按键选择。装置总体设计框图如图1 所示。
2 硬件设计
2.1 主控模块
装置若要实现对新能源汽车高效、智能的充电,则需要运算能力较强的主控模块,现采用32 位单片机MS320F28335 作为智能充电桩的主控模块[1]。我们借助于TMS320F28335 的浮点运算单元,进行快速的编写控制算法,不必在处理小数上面花费过多的时间和精力;高性能的TMS320C28x 系列 DSP 控制器,其主频高达150MHz,还包括 I2C、SPI、ECAN 等多个总线接口,可以应用于较多方面的控制类工业设备;因为它体积小、性能强、便携性高,还可应用于多种小型的手持设备,因此可以胜任本作品的设计要求。
2.2 Vienna 整流模块
智能充电桩的能源供给模块作为我们充电桩系统最核心的部分,整流部分的电源动静态性能决定着充电桩电能供给的质量与充电效率。本系统采用创新型的 Vienna 整流模块作为本系统的直流电源能源供给,它以连续导通模式 (CCM)运行,具有固有的多级开关(三级),并且可以降低功率器件上的电压应力。除此之外,Vienna 整流器作为一种创新型的整流电路,也是功率因数修正电路,相对简单的功率与控制电路。另外,其电路结构简单、使用较少的功率器件、可以实现电流谐波较低的三电平转换、同时还具有较高的功率因数和较低的导通共模EMI 噪声等优点。综合以上特点,符合本设计的要求。装置Vienna 整流模块如图2 所示。
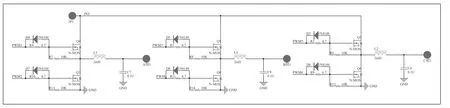
图2 Vienna 整流模块
2.3 驱动电路
智能充电桩的MCU TMS320F28335 输出的PWM 波无法直接驱动主电路的 N-MOS 管,故对主电路 N-MOS 的操控需要增加独立的外部驱动电路。本系统的驱动芯片采用EG3012 系列驱动芯片,该芯片悬浮自举电源设计,耐压可达80V、内部自配了死区控制电路、电源电压欠压关断输出自带闭锁功能,可以避免上、下管输出同时导通而导致短路现象的发生,采用半桥达林顿管的输出结构,使其具备大电流栅极驱动能力,进而达到驱动主电路的 N-MOS 管的作用。一般来说,对于同一系列参数相同的 N-MOS 驱动模块可以需要根据具体需要进行型号的选择。装置具体驱动电路如图3 所示。
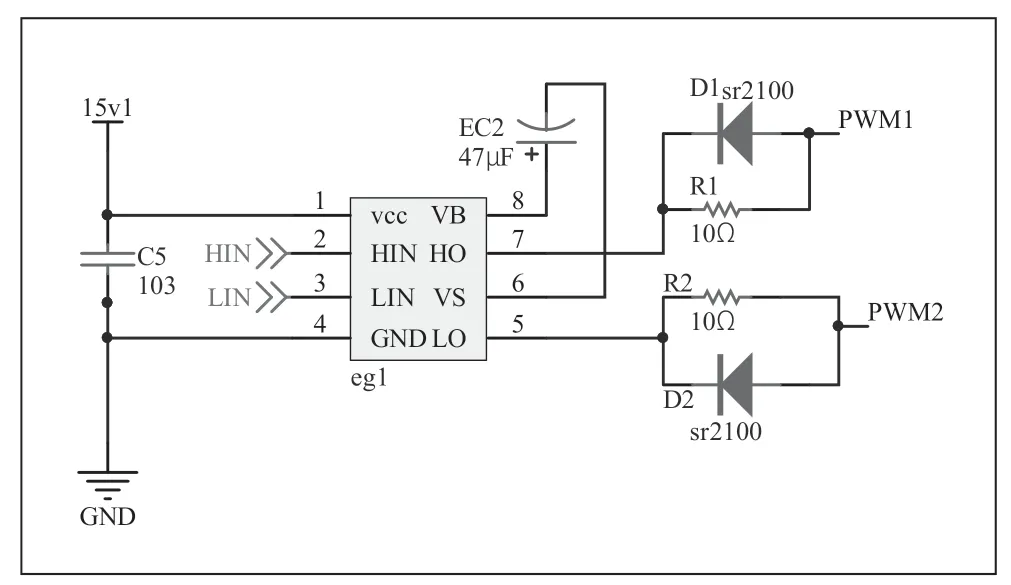
图3 驱动电路
2.4 DC-DC 变换模块
根据美国著名的科学家马斯提出的充电三定律,对于不同的新能源汽车在充电时所需的电压或者电流值大小都是不一样的,这时候就需要我们设计出可以根据不同车型变化而变化的DC/DC 变换模块。不同车型的蓄电池所剩余的电量不一样,输入的直流电流也是不一样的,当蓄电池的剩低电量于蓄电池的10%时,为了保护电池内部的活性物质不被破坏而采用小电流充电;在经过预充电后电量达到电池容量的10%之后则进行大电流的充电,因为这样可以大大减少所需的充电时间、提高充电效率;当充电电量达到蓄电池的90%之后则进行恒压充电。为了满足以上要求,在 DC/DC 变换部分我们采用的是电流型同步 buckboost 变换器。电流型同步 buck-boost 变换器可以实现系统在进行升压与降压变换的模式情况下,变换器两侧端口的电压极性不会发生改变,而电流的流动方向是可以改变的,并且借助于功率变换器具有改变电流方向的功能而对蓄电池放电电流进行控制[3]。电流型同步 buck-boos 变换器的示意图如图4 所示。
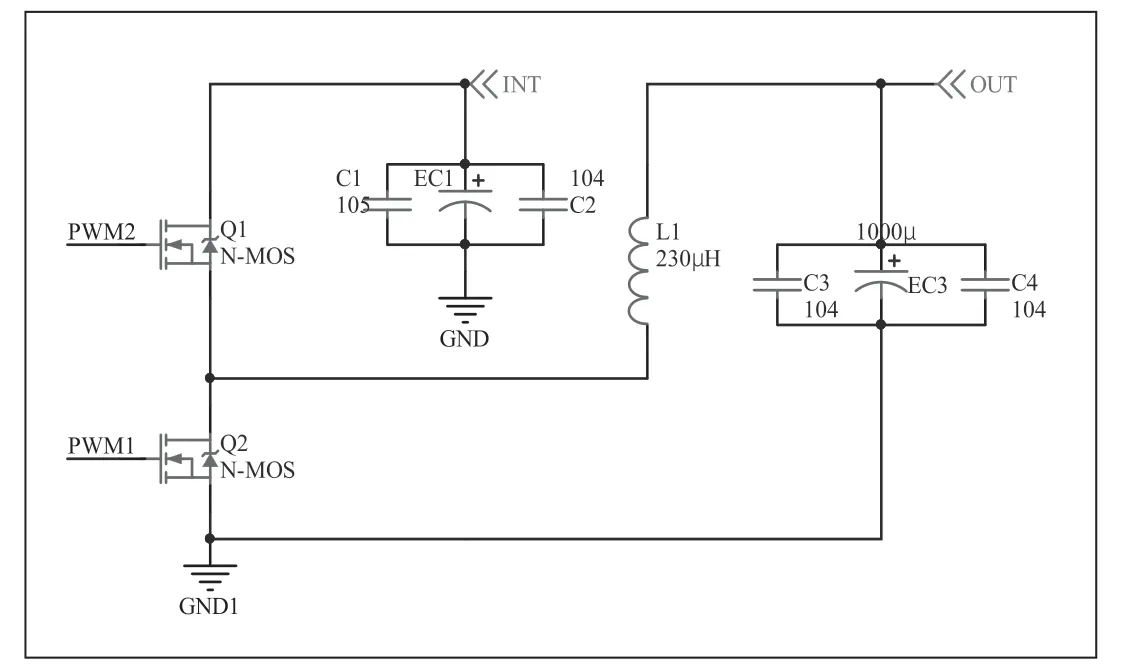
图4 同步 buck-boost
2.5 信号检测模块
2.5.1 采压模块
作为反馈信息反馈回单片机的电压值不能超过3V,否则会将单片机烧毁。而整套系统的电压值都比较大,若需要采集电压作为反馈信息则必须进行分压处理,将大电压按比例转化为单片机可以接受的小电压值。为了实现成本的最低化,我们采用两个相应比例阻值的电阻进行串联分压[2],再将得到的小电压值送入由LM358 组成的电压跟随器进行电压的跟随,增强采样电压的稳定性。
2.5.2 采流模块
电流采样模块我们采用的是用低值的康铜丝电阻,利用欧姆定理中的电阻值固定,通过测量电阻两端的电压进行计算得到电流值。由于康铜丝的阻值过小,在其两端所产生的电压也会很小,直接传送给单片机的话其分辨率较低,单片机可能会出现误判的现象,所以我们通过由INA282 芯片组成的比例放大电路进行电压值的放大后再送入单片机进行相应的处理,这样得到的参数准确率就会大大提高。
2.5.3 温度检测模块
智能充电桩在充电过程中的温度变化也是一个重要的指标,温度太高或者过低都会影响智能充电桩的质量。特别是处于大电流充电时,流过大电流的元器件会产生大量的热而使充电桩温度过高。为了避免因温度的急剧变化而引发问题,我们采用DHT11 温度传感器进行系统温湿度的检测,DHT11 将模拟信号转化为数字信号传送给单片机进而实现温湿度的实时检测。若温度异常则进行警报提醒、严重时可以将整个系统进行急停处理。
通过分别抽取系统中相应位置的信号作为反馈信息,返回给单片机进行判断当前智能充电桩的运行状况,可以精确快速地分析掌握设备当前的运行状态。装置信号检测模块如图5 所示。
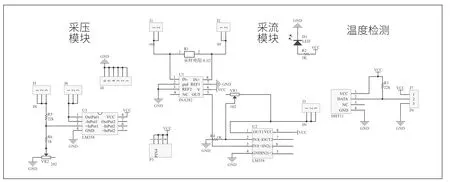
图5 信号检测模块
2.6 人机界面
人机界面是作为用户与智能充电桩之间进行交流的界面,其设计的友好性将直接影响用户的使用体验。我们本装置的人机界面主要由OLED 液晶显示屏和矩阵键盘组成。OLED 液晶显示屏为显示系统参数信息的模块,其具有抗震性能较好、不怕摔,制造工艺简单、成本低,显示画面不失真,广视角、较低耗电、极高反应速度等优点。基于以上优点,符合本装置的要求。操作模块我们采用的是4×4 矩阵键盘,提前将功能按键设定的,再通过单片机与OLED 液晶显示屏结合,节省了更多的 IO 口,提高了人机交互的效率。
3 软件设计
3.1 系统软件
系统软件部分的中心控制核心板我们采用 TMS320F28335作为 MCU,分别与 OLED 显示屏、按键电路、电压电流采样电路相连。OLED 显示屏与MCU 相连,用来作为相关数据状态的显示。TMS320F28335 分别控制外部按键和显示、给驱动电路提供PWM 波以驱动主电路。本研究采用采压采流模块(包括交直流采压采流模块)与中心控制器相连,用来采集电路中的有关直流成分的电压电流和交流成分的电压电流,再将采集到的数据传输到DSP 里进行运算,通过PID 调整、锁相技术以及滤波算法,将运算出的数据反馈给硬件电路,此反馈针对EPWM 波对BUSK 电路的升降压的调整,以及SPWM 波驱动的逆变电路输出的交流成分,同时也对逆变出来的交流与国家电网50Hz 进行并网锁相跟踪,我们的系统能够提供优化的最大功率点跟踪,同时保证稳定的电网并网运行。通过以上操作实现对整个电路进行稳压稳流和锁相跟踪的技术操作,以达到控制整个智能充电桩系统的运行状态。
3.2 PID 算法控制
PID 算法(比例-积分-微分算法)是一种在控制过程中,根据偏差的比例(P)、积分(I)和微分(D)来控制的常用算法。它基于反馈原理,通过对误差信号进行计算和调节,以实现系统的稳定控制和响应性能的优化。在我们的系统中,PID 算法被用于电能转换的控制过程中。基于实际输出值与预设设定值之间的差值,PID 控制器根据三个参数(比例系数Kp、积分系数Ki 和微分系数Kd)动态调整输出信号,以实现稳压和稳流的效果。
比例控制(P):比例参数用于根据当前误差信号与设定值的差距,对输出信号进行比例调节。它可以快速有效地响应误差的变化,但可能导致系统对于小幅度的变化过于敏感。
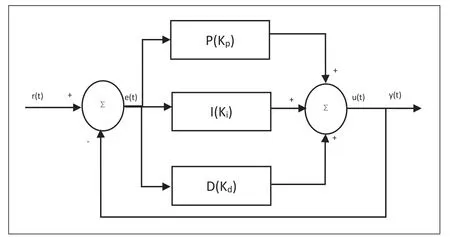
图6
积分控制(I):积分参数用于对误差信号的累积进行调节,以消除系统的稳态误差。通过累积误差的积分值,系统可以更好地追踪设定值,并减小稳态误差。然而,过大的积分参数可能导致系统的超调和振荡问题。
微分控制(D):微分参数用于根据误差信号的变化率来调节输出信号。它可以提供更快的响应速度和稳定性,尤其在误差信号发生突变时。然而,过大的微分参数可能引入抖动和噪声放大的问题。为了优化PID 控制,我们需要根据具体的应用需求进行参数调整和优化。通过实验和验证,我们可以选择合适的比例、积分和微分系数,以达到最佳的稳定性和响应性能。通过以上优化的PID 控制算法,我们的系统能够更准确地跟踪设定值,并实现稳定的电能转换。这样,我们的系统可以满足智能充电桩系统对稳压稳流和高效性能的要求,并提供可靠的电能输出。
其中:K(p)为比例增益系数,是调适参数;K(i)为积分增益系数,也是调适参数;K(d)为微分增益系数,也是调适参数;e 为误差值,公式:误差值=设定值-反馈值;t 为当前时间。
在控制系统中,反馈调节是一种常用的方法,旨在实现系统的稳定性和响应性能的优化。在给定一个激励信号r(t)的情况下,执行一系列运算来生成一个控制信号u(t),将其作为反馈信号送回激励信号,以调整系统的响应。具体而言,我们将激励信号r(t)送入求和器,与一组参考信号进行求和运算,生成误差信号e(t)。接着,这个误差信号经过比例运算器P、积分运算器I和微分运算器D的处理,分别根据比例、积分和微分的方法进行运算。比例运算器P 根据误差信号的大小调整输出信号,积分运算器I 根据误差信号的积累进行调整,而微分运算器D则根据误差信号的变化率进行调整。这些运算器的输出结果再次经过求和运算,得到控制信号u(t)。将控制信号u(t)反馈回激励信号一侧,对激励信号进行调整。通过这种反馈调节,系统能够对其自身的响应进行修正和优化,以提高整个系统的稳定性和性能。这种反馈调节的作用是,通过不断监测和修正输出信号,使系统能够更准确地跟踪预定的目标并抵消外部干扰。这样,系统的稳定性得以提高,响应更加平滑和精确。总之,通过将控制信号反馈回激励信号,执行一系列运算和调节,系统能够实现自我修正和优化,进而提高整个系统的稳定性和性能。反馈调节是控制系统中一种重要的技术手段,广泛应用于各种控制和调节场景中。
本系统采用的是位置式PID,通过检测当前值与本系统所需的目标值进行差值运算再P 比例运算,和K 积分运算和D 微分运算得出一个反馈值,将这个反馈值作用于PWM以达到升降压。
3.3 MPPT 算法控制
MPPT 算法,即最大功率点跟踪算法,可以有效地优化充电效率。在我们的三相智能充电桩系统中,我们运用MPPT 算法来实现最佳电压和电流的跟踪,以达到最大功率传输。MCU 通过实时检测整流输出的电压和电流值,并运用MPPT 算法计算出最大功率点的参数。然后,MCU 将这些参数反馈给PWM 波的占空比,从而调节整流部分的输出。这样,充电桩的输出功率可以根据实时计算得到的最佳参数进行调节,以适应不同电池和充电需求。为了实现动态的最大功率点跟踪,我们采用了扰动法。MCU 通过测量扰动前后充电桩输出功率和电压的变化,可以确定下一个周期的扰动方向。当扰动方向正确时,充电桩的输出功率将增加,从而提高了为用户设备充电的效率。通过以上优化和控制策略,我们的三相智能充电桩系统能够实现效率最大化的充电过程。通过实时计算和调节,充电桩可以根据不同环境和需求情况,快速而准确地跟踪最大功率点,从而提供高效、稳定和可靠的充电服务。这样,我们的系统可以满足用户对充电效率和能源利用的高要求。
本系统采用扰动式观察法MPPT 算法,采输出的电压电流,通过MPPT 算法运算。得出一个最大功率对应的电压,将此电压作为目标值反馈给PID 算法运算,及时调整BUCK-BOST 同步升降压电路的电压。以达到三相充电桩输出的最大功率输出,最终给用户汽车快速地充电。
3.4 锁相控制
本三相充电系统使用锁相环(PLL)技术来实现。锁相环是一种反馈控制系统,通过比较输入信号与参考信号之间的相位差,并根据该差异进行调整,使得输出信号与参考信号相位保持一致。在电源锁相过程中,系统首先使用传感器或电路测量输入电源信号的相位和频率。然后,系统将这些测量值与内部的参考信号进行比较,并通过调整系统的频率、相位和幅值,使得输出信号与参考信号保持一致。这样,电源系统能够稳定地输出电能,与外部电源同步工作。
4 结束语
三相智能充电桩必将是未来清洁能源汽车的最佳能源供给方案,其可以克服传统充电桩覆盖面率低、充电时间长、效率低等缺点,且能够进行对相应位置的车辆剩余电量检测,并进行高效的、大功率的、智能的充电;除此之外,该模型结构简单、制作的难度系数较低,可以大大地降低其制造成本。高效、智能、安全系数较高的三相智能充电桩符合当今社会的绿色发展理念,拥有着广阔的市场前景。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
数学小灵通(1-2年级)(2020年6期)2020-06-24
电子制作(2019年13期)2020-01-14
中学生数理化·中考版(2019年10期)2019-11-25
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
中学生数理化·八年级数学人教版(2017年2期)2017-03-25