高精度智慧城市实景三维模型构建的关键技术
2023-11-14 13:46:26李国斌LIGuobin李佳维LIJiawei
价值工程 2023年30期
李国斌 LI Guo-bin;李佳维 LI Jia-wei
(辽宁建筑职业学院,辽阳 111000)
0 引言
智慧城市的建设是当前城市建设的主要发展趋势,本质为通过一系列的信息化技术手段,实现城市的智能化管理与服务,提高城市的运行效率,提升城市居民的生活质量[1]。而实景三维模型,作为一种新型的城市空间数据模型,能够直观地展现城市的地理形态、建筑风貌、基础设施等要素,为城市规划、管理、运营提供有力的支持[2]。因此,构建高精度智慧城市实景三维模型是智慧城市建设的重要基础。目前,实景三维模型的发展已经进入到了一个新的阶段。随着航空摄影、激光雷达、倾斜摄影等新兴技术的应用,实景三维模型的精度和范围得到了大幅提升[3]。高精度智慧城市实景三维模型的构建涉及多个关键技术领域,包括航空摄影技术、倾斜摄影技术、数据处理与管理技术等[4],本研究以具体工程项目为例,分析了高精度智慧城市实景三维模型构建的关键技术。
1 工程项目及技术路线
2021 年,智慧城市发展下,为更好地采集沈阳市某地实地现场,获取该地区空间规划必需的规划元素,需要对其构建实景三维模型,项目总区域为26 平方公里,目标区域地势较为平坦,但内部高层建筑数量较多。
高精度智慧城市实景三维模型构建的基本原理为利用获取的数据生成点云数据,通过点云数据构建TIN 三角网,最终对其贴膜处理[5]。数据获取方式包括倾斜摄影技术与地面激光雷达技术,即通过无人机影像生成的稀疏点云与激光雷达点云相融合,最终生成高精度智慧城市实景三维模型,具体技术路线见图1。
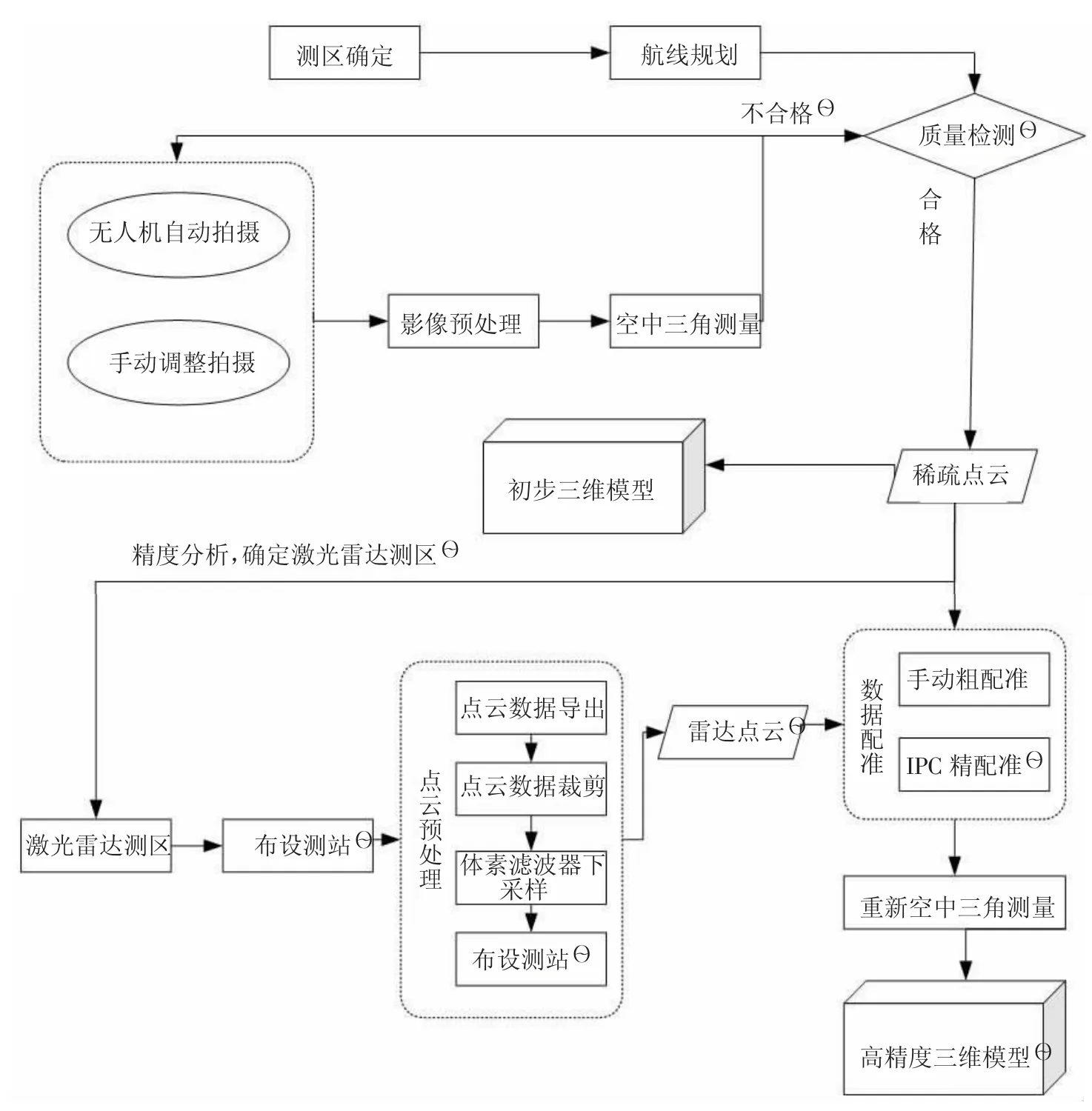
图1 技术路线
2 设计方案
2.1 无人机数据采集
航线设计是无人机数据采集的重要环节,其主要目标是确保无人机在飞行过程中能够高效地覆盖目标区域并获取所需的数据。在飞行高度设计上,一般而言,飞行高度越低,地面分辨率越高,但需要根据城市规模、地形和无人机的性能,确定合适的飞行高度。综合考虑下,采用下述公式进行飞行高度h 计算:
式中,f 为镜头主距,本工程采用大疆M300 多旋翼无人机,搭载睿博5 镜头倾斜相机,相机焦距正射22mm,倾斜55mm;a 为像元尺寸,3.9μm;GSD 为地面分辨率,本工程按照最小焦距,根据工程要求,地面分辨率应超过5cm,经计算,当相机正射地面时,求得h 为≤282m。在实际作业中,需要根据实际建筑分布合理进行航线高度调整,并选择合适的飞行速度,以保证无人机能够稳定飞行并获取高质量的图像。
航线布设是指将设计的航线转化为实际的飞行路径。在这个过程中,需要将无人机与相应的导航系统、控制系统和传感器进行集成,以确保无人机能够按照设计的航线进行飞行。为了实现精确的航线布设,需要使用全球定位系统(GPS)和惯性测量单元(IMU)等设备来对无人机进行精确的定位和导航。同时,还需要在无人机上安装高精度的传感器,如激光雷达(LiDAR)和高清摄像头等,以获取高质量的地理信息和图像数据。根据工程要求,航向与旁向重叠度分别设定为80%和70%,像片倾角控制在7°内,当不受风向干扰时基本在5°内,像片旋角控制在15°内,二者不会出现同时处于最大角度的情况。根据飞行高度,采用45°倾角进行计算,按照1:1 的比例对航区外扩范围进行外扩。无人机采取等距间隔拍照模式,间隔时间为0.6s,同时,补充手动拍摄模式,相机朝向与主航线保持平行,具体见图2。

图2 无人机拍摄模式
像控点布设过程中,需要在无人机上安装高精度的GPS 和IMU设备,以确保拍摄的图像能够精确定位并映射到地理坐标系中。为了实现精确的像控点布设,还需要在目标区域中选择一些特定的点作为像控点。这些点需要在整个区域范围内分布均匀,并且容易识别。像控点通常会选择一些明显的建筑物、交叉路口或者地标等。在拍摄过程中,无人机需要飞越这些像控点并记录其地理坐标,以便将拍摄的图像与地理坐标系进行精确匹配。根据工程要求,本工程综合运用POS 数据与空中三角测量数据,该方法可以有效降低像控点布设工作量,在航线中部与两端分别布设2 个以上的平面控制点,区域四角与中部附近布设1 个像控点,其他区域按照相隔160m 进行像控点布设。
2.2 地面激光雷达数据采集
工程通过徕卡BLK360 激光仪获取地面激光雷达数据,实地作业时需要率先确定测区,测区可根据对稀疏点云构建的初步三维模型进行精度分析,从而获取到激光雷达测区,之后进行测站布设。该仪器的扫描范围为0.6~60m,一般而言,点云精度与测距精度会随着扫描距离的增加而降低,根据工程精度要求,测站的实际扫描距离设定为25m,可根据实际建筑分布情况进行微调。同时,便于后续点云数据的拼接,两个相邻的测站间在扫描范围上会有一定重合。
3 关键技术
3.1 多源数据融合
三维实景中多源数据的应用,需要解决相应的空间融合问题,为实现数据空间融合应将所有数据统一匹配到相同的空间参考基准上,从而实现空间位置配准。在实际处理应用中应将像素坐标,图像坐标与绝对坐标系进行统一规范,在模型构建中可通过计算机软件等辅助工具完成多源数据处理操作。
3.2 点云配准
智慧城市实景三维模型构建中的点云配准技术实际上属于异质数据,此类型数据实质上是经过滤波后的点云与影像密集匹配生成的点云配准。应用将需要将点云三维坐标、立面信息与RGB 色彩纹理进行融合,从而满足模型反映建筑细节特征的基本要求,为后续纹理映射提供数据支撑。点云配准中需要分别完成粗配准与精配准。
点云粗配准中需要通过初始估计值减少迭代计算时间,提高整体效率。目前常用的粗配准方式有精密设备点云配准、人机交互点云配准、主成分分析点云配准和模糊几何特征点云配准。模型构建中选择采用人机交互点云配准方式,通过选取相同特征点,计算分析影像点云与激光点云的近似旋转平移矩阵。在同名特征选取中,可通过手工选取方式进行点云配准,也可以通过数据获取预先布设标靶方式进行点云配准。人机交互下基于同名特征的点云配准方式的表达式如下:
式中,Pt和Ps表示目标点云与源点云中的对应点;R和T 分别为求解两个点云的旋转与平移矩阵。
此外,点云精配准可有效提升其精度,目前常用的点云精配准方法有迭代最近点法,其在应用中通过计算两个点云之间最近对应点获得相应的变换矩阵,具体应用步骤如下:
步骤1:进行点云预处理操作。将所有获取到的点云经过滤波处理,剔除其中的噪点与无用类别信息。
步骤2:计算最近点。计算点集Si中相应的点集P 的最近点。
步骤3:计算得出参数向量Xk+1,并通过点集与相应的配准过程得到相应的数值,计算获得相应的距离平方与值dk。
步骤4:在点集P 的基础上获得相应的参数向量Xk+1,并通过相应的变化得到新的点集Pk+1,在此基础上,重复步骤1 的计算内容。
步骤5:计算过程中当dk小于预设的数值时,停止迭代。
3.3 纹理贴图
采用Context Capture 三维建模软件进行最终的多源融合建模,将经过点云配准处理的激光雷达点云数据与倾斜影像数据导入软件中,并在软件中进行空中三角测量,完成三维模型构建。该过程中纹理贴图非常重要,其关键在于如何短时间内选取目标物不同方向的最优影像纹理信息,工程设定的纹理拼图流程如下:
①构建索引数据:通过对激光雷达点云数据与倾斜影像数据的处理可以获取到目标物结构,对其进行提取建立白膜后,逐一进行编号,并将其与对应单体影像信息进行一一关联,形成索引机制。
②单体影像集分类:按照影像朝向,可以将单体影像集分成下视、前视、左视、右视、后视五类,通过分类可以快速对已获取的单体影像朝向进行判断。
③目标物侧面纹理获取:可直接通过下视图获得顶面纹理,而其他方向纹理则需要通过中心点投影的方式计算出其在地平面的向量,即目标物面中心与影像摄影中心投影到地平面,并测出与目标物面法向量夹角,一般而言,其夹角越小,影像朝向越佳,即需要找到最接近正射角度得到影像集合。
④目标物纹理优化:在获取到所有面的纹理集合以后,可以通过计算所有影像集中影像到目标物的向量值获取到最优目标物影像,该影像越贴近目标物立面信息,说明目标物纹理效果越好。
4 三维模型精度评估
当前,学术界在三维模型精度评估中并未形成统一技术规范,本文主要参考张号的等人关于倾斜摄影三维模型质量评价的内容方法,在质量检查元素与权重基础上进行了扩充与深化,最终从空间参考系、位置精度、模型质量、逻辑性、场景效果与附件质量六个层面进行了赋权处理与分析,具体内容如表1 所示。
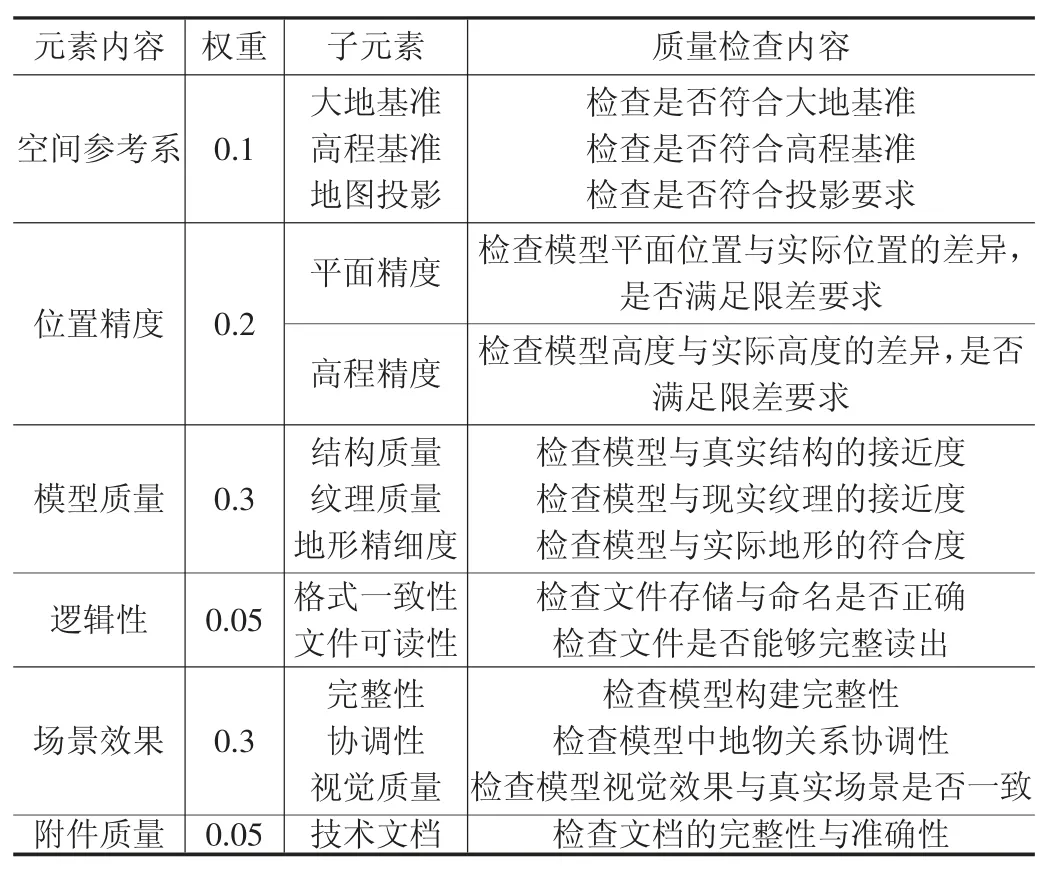
表1 三维模型精度评估质量检查元素与权重
结合上述三维模型检查元素,可确定该融合模型的空间参考坐标系为WGS84,由此确定空间参考系符合实际要求。根据三角测量质量结果,可确定模型的平面精度为0.038m,同时,参考价奥经验模型获取高程精度,可确定其精度为平面精度的三倍左右,基本为0.116 左右。此外,在模型质量上,初步模型中建筑结构出现了不同程度的变形与扭曲,严重情况下出现了空洞。但在融合模型应用下,有效解决了建筑结构中的变形问题,同时使得建筑结构与纹理得到了有效改善。在逻辑性上,参考精度评估质量检查中的格式一致性与文件可读性元素,发现其均符合模型要求,具有较好的应用效果。最后,三维模型精度的场景效果整体表现较好,所展示的场景效果能够较好的与实际地物状况相互契合,同时附件质量中的技术文档的完整性与准确性较高,能够满足模型应用要求。
5 结语
本文基于智慧城市与三维模型基础上,对高精度智慧城市实景三维模型重构进行了深入分析,其中探讨了实景三维模型构建的关键技术内容,通过多源数据融合、点云配准与纹理贴图技术介绍,结合建筑项目提出了模型建设应用方案,在具体工程实例应用上进行了全面分析,为智慧城市实景三维模型建设与发展提供的技术支持与内容参考。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
江苏安全生产(2022年5期)2022-06-16 07:51:04
汽车观察(2021年8期)2021-09-01 10:12:41
华人时刊(2021年23期)2021-03-08 09:27:24
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
北方音乐(2017年4期)2017-05-04 03:40:09
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25