一种新型微弱ADS-B信号译码算法
2023-11-13 01:58:08魏子轩
无线电工程 2023年11期
魏子轩,高 勇
(四川大学 电子信息学院,四川 成都610065)
0 引言
广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B )是一种新的航空器监视技术[1-3]。与基于问答的A/C模式二次雷达技术相比,飞行器会自动地定时广播包含飞行器飞行高度、航向等数据的ADS-B信号。ADS-B信号可被周围的其他飞行器和地面的雷达接收,从而达到实时监视各飞行器飞行状态的目的。
随着空中管制系统,尤其是最近备受关注的星载ADS-B技术的发展,ADS-B信号的传播环境更为复杂,传输距离更大,这些因素使得ADS-B信号的接收功率更低,对ADS-B信号的正确接收带来巨大挑战。国际标准[2]中描述了地面站接收机广泛使用的ADS-B信号译码技术,利用了每个比特位置的所有样本来确定比特和置信度。这种技术在高信噪比的情况下工作得很好,但对于低信噪比的信号译码效果较差。文献[4]提出了一种基于码元相关的解调算法。除此之外,单脉冲检测法[5]也可用于ADS-B信号的脉冲检测及译码。针对低信噪比的情况,文献[6-7]提出了基于匹配滤波器的N-置信度纠错算法。文献[6]先基于匹配滤波器对ADS-B信号进行译码,然后根据最优阈值确定低置信度比特,如果低置信度比特数不超过N,就在低置信度比特的范围内进行循环冗余校验纠错。该算法在低信噪比的情况下有较低的误码率。文献[8]提出了基于反演策略的星基ADS-B信号译码算法,根据ADS-B信号的前导脉冲估算空间系统参数,然后利用反演算法消除信道对信号传输的影响。文献[9]提出了基于小波变换的ADS-B信号增强方法,对 -94 dBm的微弱信号仍可以正确译码。文献[10]提出了基于生成对抗网络的ADS-B信号降噪方法,在低信噪比条件下降低了误码率。文献[11]提出一种基于APES算法的弱ADS-B信号参数估计方法,有助于提升复杂电磁干扰[12]下ADS-B信号的接收及解调效果。
ADS-B信号起始位置估计方法包括改进的脉冲沿检测法[13]、基于ADS-B信号前8 μs的匹配滤波器法[14]、基带归一化的互相关法[15]以及联合前导脉冲和数据块中DF位的前导脉冲检测法[16]等。文献[17]提出了将匹配滤波器的0值变为负值的负电平化匹配滤波器,从而避免选取硬阈值,只需选取输出值最大处作为ADS-B信号起始位置的估计。
针对ADS-B信号数据块中可能出现的连续错误,文献[18]提出了ADS-B信号保守纠错技术。在低置信度比特不超过11位,且错误比特集中在 24位的范围内时,可以正确纠错。
本文先将解调后的信号减去均值,根据文 献[17]提出的负电平化匹配滤波器检测ADS-B信号的起始位置,然后根据含噪信号数据块的协方差矩阵做进一步修正,最终确定信号起始位置。根据新的起始位置重新确定协方差矩阵后,接下来根据奇异值分解的结果得到脉冲波形估计值,与标准脉冲波形分别对数据块进行初步译码。最后在低置信度位的范围内,分别通过循环冗余校验进行纠错。理论计算和实验表明,本文的信号起始位置修正算法优于文献[17]方法,且噪声为加性高斯白噪声、前导脉冲位置确定时,本文译码算法的正确接收概率高于文献[6]提出的方法、简单的中点判决法和基线多点判决法[2],并且对-99 dBm的实测微弱信号的正确接收概率为97.9%。
1 ADS-B信号模型
一帧ADS-B信号持续时间为120 μs,前8 μs为ADS-B的前导部分,后112 μs为数据块。任何ADS-B信号的前导是固定的:在0、1、3.5、4.5 μs处有持续时间为0.5 μs的脉冲。数据块采用脉冲位置调制,共包含112 bit的信息,每比特数据持续时间(码元时间)为1 μs。如果脉冲在码元的前半微秒,则代表“1”;如果脉冲在码元的后半微秒,则代表“0”。ADS-B信号的脉冲持续时间的误差不超过0.05 μs,且调制到1 090 MHz后发送,调制频率允许±1 MHz的偏差。
ADS-B的基带信号模型为:
(1)
式中:T=0.5 μs,s[k]为0或1,u(t)是持续时间为T的矩形脉冲函数。
ADS-B数据块利用循环冗余校验(Cyclic Redundancy Check,CRC)提高信息传输的可靠性。 112 bit中前88位包含飞行器的飞行数据,后24位是循环冗余校验位。
2 基于前导起始位置修正和脉冲波形估计的译码算法
2.1 信号起始位置的估计与修正
从数据块起始位置开始按比特将信号划分成 2种持续时间为1 μs的片段,分别对应“1”码和“0”码。如果采样率为2LMHz,信号幅度为A>0且未知,则有:
(2)
每个列向量的长度都是2L。m1的前L个元素是A,后L个元素是0,对应的是“1”码;m2的前L个元素是0,后L个元素是A,对应的是“0”码。

x=Mv+n,
(3)
式中:v为某个单位列向量,n为噪声向量。根据mi和码元之间的对应关系,只要能确定v具体是哪一个单位列向量,就能确定片段x对应的码元。实际上,为了技术上的简便,可将数据块的采样减去其均值。此时向量m对应的是“1”码;向量-m对应的是“0”码,其中向量m为:
(4)
此时式(3)中的矩阵M变为向量m,且向量v变为标量v,即式(3)变为x=mv+n。v=1时对应比特“1”;v=-1时对应比特“0”。
假设包含ADS-B信号的含噪采样的长度不比120 μs长太多。将含噪采样减去其均值后,根据文献[17]提出的负电平化匹配滤波器与含噪采样做卷积,输出值最大处即为信号的起始位置的初步估计值。接下来根据含噪数据块的协方差矩阵对该估计值进行修正。
先计算含噪信号的数据块部分的协方差矩阵E[xxT]。认为信号与噪声相互独立,记Rn=E[nnT],则有:
按文献[17]方法初步估计ADS-B信号的起始位置后,得到112个码元对应的片段x1~x112,然后计算矩阵G:
(6)
矩阵G就是E[xxT]的估计值,从而也是矩阵mmT+Rn的估计值。根据式(4)可知当ADS-B信号的起始位置估计无偏差时,
(7)
式中:EL是L×L维的全1矩阵。如果信号起始位置的估计值与真实值有偏差,则G会改变。假设偏差小于一个码元长度,则估计值提前K个采样点等价于延后2L-K个采样点,所以只考虑估计值延后 1~2L-1个采样点的情况。
如果估计值的延后值K大于0小于L,则M可用2个向量表示,即:
(8)
式中:E1×k是1×k维的全1矩阵,01×k是1×k维的零矩阵。仿照式(5)的证明过程,可知此时矩阵G是矩阵MRvMT+Rn的估计值,其中Rv=E[vvT]。由于数据块起始位置的估计值有偏差,故每个bit对应的采样片段实际包含2个连续比特的信息。“00”对应的向量v为[-1,-1]T,“01”对应的向量v为[-1,1]T,“11”对应的向量v为[1,1]T,“10”对应的向量v为[1,-1]T。每种向量出现的概率都是0.25,故向量v的协方差矩阵Rv=I,其中I是单位矩阵。
同理,若估计值的延后值K大于L小于2L,则:
(9)
同样有Rv=I。这样就求得了K与MRvMT的关系。
图1是采样率为100 MHz,K=20和K=70时的矩阵MRvMT的理论值,用灰度图来表示MRvMT中元素的大小。黑色的像素对应的值为-A2/4,深灰色的像素对应的值为0,浅灰色的像素对应的值为A2/4。

(a)K=20

(b)K=70
可以看出,当K≠0且K≠50时,矩阵MRvMT对角线上有3个维数不同的、每个元素值都相等的子矩阵。根据式(7),当K=0或K=50时,MRvMT的对角线上只有2个相同维数的元素值相同的子矩阵。所以根据MRvMT对角线上的子矩阵的维数,可以反推出K。由图1可知,当只利用对角线上的子矩阵来估计K时,会发生无法区别K和K+50的情况。由于估计值偏差越大,其发生的概率越小,故只需选择偏差最小的情况。即采样率为2LMHz时,修正值大于-L小于L,其中负值表示将信号起始位置估计值提前,正值表示将信号起始位置估计值延后。
由于G是MRvMT+Rn的估计值,所以根据G可以对信号起始位置的估计值进行修正。图2表示的是某个实测ADS-B信号的矩阵G。从图中可知信号起始位置的估计值与真实值有偏差。根据对角线上第一个灰色矩阵的行数确定修正值。
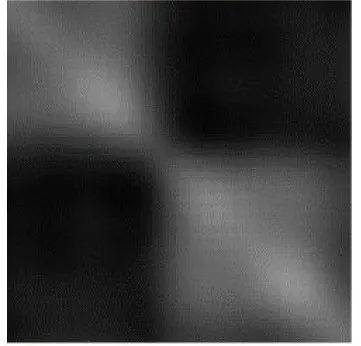
图2 实测信号的矩阵GFig.2 Matrix G of measured signal
2.2 初步译码

(10)

由于脉冲波形的估计值受噪声的影响,所以当噪声过强时,脉冲波形的估计值与实际波形可能差异较大,甚至大于标准脉冲波形(如式(4))与实际波形的差异,此时基于标准脉冲波形译码反而有更低的误码率。对于某一条接收信号,由于不确定 2种脉冲波形哪一种更有效,所以按照标准脉冲波形和脉冲波形估计值分别进行初步译码和纠错。

2.3 比特纠错
分别将2组112个置信度升序排列,并认为译码错误发生在置信度最低的若干比特中。由于ADS-B信号数据块的汉明距离为6,故最多能纠正5位错误。如果译码结果的错误图样是0,则无译码错误;若错误图样不是0,从选取的低置信度比特中任选1~5个比特计算错误图样,如果和译码结果的错误图样相同,则被选择的比特就是错误译码比特,直接将译码结果中的对应比特取反即可纠错;否则纠错失败。在至多错误5 bit的条件下,选取的低置信度比特位数越多,成功纠错的概率越大,但需要的时间也越多,故低置信度比特位数根据以上2个因素按工程需要做取舍后决定。
译码算法整体流程如图3所示。

图3 译码算法整体流程Fig.3 Whole process of decoding algorithm
2.4 理论误码率计算
为了验证本文提出的算法的有效性,通过计算和仿真实验与文献[6]、简单的中点判决法和被地面接收机广泛采用的基线多点判决法[2]做对比。衡量算法有效性的2个指标是误码率和正确接收概率(Probability of Correct Reception,PCR)。正确接收概率指的是正确译出ADS-B数据块信息的概率。为便于比较,理论误码率的计算基于文献[6]的信号模型,该文献的ADS-B信号基带采样的模型为:
(11)
(12)
式中:rI[n]为ADS-B的I路基带信号的采样,rQ[n]为ADS-B的Q路基带信号的采样,两路信号的采样率都是18 MHz,故L=9。这与本文使用的采样率为100 MHz的实测信号有区别。为了与文献[6]做对比,将仿真实验的信号采样率同样设为18 MHz。φ0是信号的相偏,且认为相偏在同一个信号中保持恒定,并服从[0,2π)的均匀分布。wI[n]和wQ[n]分别为I路和Q路上的噪声,并假设二者是独立的零均值加性高斯白噪声,且两路噪声的方差相同,记为σ2。s和u的含义与本文的模型相同,且A是正数。文献[6]不考虑两路ADS-B基带信号的定位问题,故本文计算时也做相同的假设,即假设ADS-B信号的起始位置是确定好的。
本文基于该模型的译码算法是:首先对I路和Q路两路信号的数据块部分分别取平均值,作为两路信号幅度的一半的估计值,且分别记为I和Q。然后将两路原信号分别乘上I和Q的符号,使得两路信号的幅度都为正值,将该过程称为符号修正。
注意到将两路信号相加后可能会增加比特信噪比。可以用信号幅度的平方与噪声方差的比值来衡量信噪比。若将两路符号修正的信号相加,则衡量信噪比的值为(|Acosφ0|+|Asinφ0|)2/2σ2;I路符号修正信号对应的值为(|Acosφ0|)2/σ2;Q路符号修正信号对应的值为(|Asinφ0|)2/σ2。将Acosφ0的估计量I/2和Asinφ0的估计量Q/2代入以上 3个量,并约去分母的σ2,得到(|I|+|Q|)2、2I2和2Q2。需选出这3个值中的最大值对应的修正信号或修正信号之和来进行后续处理。
基于标准脉冲波形和基于脉冲波形估计值的译码过程是并行独立的,因此二者的误码率也是相互独立的。由于基于脉冲波形估计值的误码率计算极其复杂,在此只计算标准脉冲波形对应的误码率。记(|I|+|Q|)2最大为事件H1,2I2最大为事件H2,2Q2最大为事件H3。则误码率可表达为:
(13)

只计算Pe,2、Pe,1和Pe,3的计算过程类似。用比特信噪比代替方差,即:
(14)
式中:N0为加性高斯白噪声的单边功率谱密度,Eb为信号的比特能量,X~N(μ,τ2)表示X服从均值为μ、方差为τ2的正态分布。
如果某比特信号的采样值对应“1”,则:
(15)
如果某比特信号的采样值对应“0”,则:
(16)
故:

(18)
经简单计算可知:
(19)
且二者独立,从而可以计算P(H2):
式中:f(r,θ)是(I,Q)联合分布的概率密度函数的极坐标形式。
(21)
积分区域D2为:
(22)
同理:
(23)
积分区域D3为:
(24)
因此P(H1)=1-P(H2)-P(H3),这样就求出了误码率Pe。
3 仿真验证
由于文献[6]的信号模型不涉及信号起始位置估计的问题,因此仿真实验是与文献[17]的匹配滤波器法进行比较,以证明本文的信号起始位置修正方法是有效的。仿真信号的采样频率为100 MHz,加入高斯白噪声后通过低通滤波器。分别统计文 献[17]方法和进一步修正后的信号起始位置估计值与实际值之间的平均偏移。实验结果如图4所示,横坐标为高斯白噪声的比特信噪比。从图4可知,修正算法能明显减少信号起始位置估计值与实际值之间的平均偏移,有助于减小后续译码过程的误码率。
以下对2.4节中计算的误码率进行仿真验证,仿真实验同样基于文献[6]的信号模型。当比特信噪比为7 dB时,标准脉冲波形对应的相偏-误码率曲线的理论值和仿真结果如图5所示。可见理论值与仿真结果吻合得很好。

图5 相偏-误码率曲线Fig.5 Curve of phase offset-bits error rate
由于相偏是均匀分布,故平均误码率就是各相偏对应的误码率的均值。文献[6]指出其算法对应的误码率为0.5exp(-Eb/(2N0))。基于标准脉冲波形的译码算法和其他3种算法的误码率如图6所示,可以看出本文译码算法的误码率是较低的。
由于被比较的3种算法仍只能至多纠正5个错误,故本文算法的正确接收概率也高于上述3种算法。由于基于标准脉冲波形的初步译码与基于脉冲波形估计值的初步译码并行,实际上本文译码算法的正确接收概率应高于图6中理论平均误码率对应的正确接收概率。

图6 平均误码率比较Fig.6 Average BER comparison
4 实测信号验证
实测信号是采样率为100 MHz的单路ADS-B信号,信号前导脉冲的位置未知。根据本文的译码流程处理信号,其中低置信度比特位数选为40。译码结果如表1所示。
表2为信号功率为-100 dBm时,译码流程中各个步骤对正确接收概率的增益,说明信号起始位置估计的修正和脉冲波形估计能提高ADS-B信号的正确接收概率。

表2 不同步骤对译码结果的影响Tab.2 Influence of decoding results by different steps
5 结论
仿真和实测信号的测试表明,本文改进后的译码算法能有效提高微弱ADS-B信号的正确接收概率,效果优于文献[6]、简单的中点判决法和基线多点判决法[2],信号起始位置估计值的修正算法效果优于文献[17],且对于-99 dBm的实测信号有 97.9%的正确接收概率。本文中估计脉冲波形的方法会受到噪声的影响,因此提高脉冲波形估计的精确度还可能进一步降低误码率。此外,ADS-B信号的前导脉冲检测也对译码过程至关重要,提高前导脉冲检测的灵敏度,更精确地估计ADS-B信号的起始位置也是值得深入研究的问题。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31 05:18:20
现代计算机(2021年36期)2021-03-14 00:50:38
中学生数理化·高一版(2019年12期)2019-12-31 06:52:24
当代石油石化(2018年1期)2018-08-10 06:50:54
中国钢铁业(2018年6期)2018-07-26 06:55:00
新闻传播(2016年3期)2016-07-12 12:55:27
遥测遥控(2015年2期)2015-04-23 08:15:19
单片机与嵌入式系统应用(2014年7期)2014-03-24 19:12:05
铁路通信信号工程技术(2014年3期)2014-02-28 16:56:24
华东理工大学学报(自然科学版)(2014年3期)2014-02-27 13:49:04