海洋浮标风光储柴供电系统仿真研究
2023-11-06 05:20毛轻扬窦银科李宇帆
上海电力大学学报 2023年5期
毛轻扬, 窦银科, 李宇帆
(太原理工大学 电气与动力工程学院, 山西 太原 030024)
随着科技发展,人类活动范围从陆地拓展到海洋,丰富的海洋资源得到了人类的重点关注,走向深蓝、建设海洋强国也成为国家战略。当前,海洋环境探测的手段仍以卫星遥感和海洋浮标为主[1]。近年来,许多大型海洋浮标投入使用[2],其搭载的观测设备和智能传感器的数量更多、种类更加丰富,摄像设备等高耗能仪器的使用对浮标供电系统的发电量、运行稳定性都提出了更高的要求。
目前,浮标式观测设备的电源多采用风机、光伏板和储能电池组成的小型供电系统,受环境因素影响较大。同时,由于工作环境和设备安装区域受限,制约了发电量,仅仅依靠传统的风光互补供能以及定期更换蓄电池的方式已经无法满足需求;同时,在设备使用期内,经常需要工作人员进行维护保养也会提高成本。因此,基于大型海洋浮标的工作特性设计可以自动长时间提供稳定能量的供电系统具有重要意义。
本文基于MATLAB/Simulink平台搭建了一套风光储柴综合供电系统仿真模型,对风机、光伏发电系统的容量进行了配置,为其选择了合适的最大功率点追踪(Maximum Power Point Tracking,MPPT)控制算法,并针对浮标在海洋环境下舱内的高温、震荡现象提出了一种能量协调控制策略,以期实现大型海洋浮标的长时间供电和稳定运行。
1 系统结构
本文设计的风光储柴综合供电系统的总体结构如图1所示。

图1 风光储柴供电系统结构
该系统由垂直轴风力发电机(以下简称“风机”)、光伏阵列、柴油发电机(以下简称“柴油机”)、储能系统、直交流负载以及控制模块构成。风机、光伏阵列、储能系统经过控制电路汇至直流母线,产生的直流电能经过逆变后与柴油机产生的电能共同建立交流母线。系统产生的能量在母线两侧流动,直流负载由直流母线经过DC/DC变换器供电,交流负载所需电能直接由交流母线提供。
2 系统仿真建模
根据设计的风光储柴综合供电系统的电气结构,结合系统各部分的工作原理,运用MATLAB/Simulink平台,建立多能源供电系统的仿真模型。
2.1 风力发电系统仿真模型的建立
垂直轴风机由于采用了三相永磁电机,不需要励磁绕组、集电环以及电刷装置,故障产生率低,可捕获360°范围内的风能,具有占用空间小、重量轻、易安装以及抗震能力强等特点[3]。相较于水平轴风机,垂直轴风机更适用于海洋环境下为浮标观测设备供电。因此,本文选用垂直轴风机进行仿真,额定容量为650 W。
风机利用叶片捕获自然界的风能带动转轴做功,发电机将转轴的机械能转化为电能[4]。由动量理论,单位时间内获取的总风能为
Pwind=0.5ρAv3Cp(β,λ)
(1)
式中:Pwind——捕获的风能;
ρ——空气密度;
A——风流过的截面面积,A=πR2,R为风力机半径;
v——风速;
Cp(β,λ)——风能利用系数;
β——桨距角;
λ——叶尖速比。
风能利用系数Cp反映了风机的能量利用率,垂直轴风机的桨距固定,可令桨距角β=0°,则Cp的表达式为
(2)
式中:ω——叶片角速度,rad/s。
为了最大化利用风能资源,提高发电效率,需要为风力发电系统选用合适的MPPT控制算法。风机的MPPT控制算法一般有最适叶尖速比法、功率特性法以及爬山探索法3类[5]。其中,爬山探索法的原理简单高效,适合作为垂直轴风机的控制算法。该方法的原理是在风机运行时对其旋转角速度ω施加人为扰动后,对功率的变化值进行判断,从而探索该功率下的最佳转速,最终通过控制电路中的IGBT开关管改变占空比来达到目的。根据上述基本原理建立模型后将各个模块进行封装,结合Boost电路,构建650 W风力发电系统仿真模型,如图2所示。其中,v0为电机转速;U、I分别为图中boost电路输入端电压和电流;m为系统参数;Tm为转矩;P为boost电路的输入功率;PWM为触发脉冲;pwm为开关的脉冲信号。

图2 风力发电系统仿真模型
2.2 光伏发电系统仿真模型的建立
在复合发电系统中,光伏电池是利用太阳光照射在光伏板上产生的光生伏打效应来产生电能[6]。光伏电池等效电路模型如图3所示。其中,RL为负载,Upv、Ipv为光伏电池输出端电压和电流。

图3 光伏电池等效电路模型
根据图3所示的等效电路模型,可以得到光伏电池在工程研究中的数学模型为
(3)
式中:Isc——短路电流;
Uoc——光伏电池开路电压;
Im——峰值电流;
Um——峰值电压。
由于外界光照强度S与温度Te发生变化时会影响电池组件的各项参数,因此需要对该数学模型加入修正量U′和I′如下
(4)
式中:γ=0.002 88;β=0.5;α=0.002 5;
Sref——额定光强,取1 000 W/m2;
Tref——额定温度,取25 ℃。
根据上述数学模型,能够建立光伏电池的封装模型。本文设计的光伏发电系统的额定容量为600 W,由3个单体200 W光伏电池并联组成。
海洋气候丰富多变,时常有多云、阴雨天气,同时由于每天的昼夜更替,光能资源不稳定,就要求控制系统的可靠性更高,并且能够在复杂多变的环境下及时反应,对光能进行有效捕获。在常见的光伏MPPT控制算法中,变步长扰动观察法的原理较为简单,控制效果较好,非常适合小型光伏发电系统[7]。该方法的原理是对运行的光伏电池端电压施加一个正向扰动量,然后采集功率数值并与之前的值进行比较,根据差值判断扰动方向,使输出功率不断接近最大值。变步长是指扰动步长能够根据功率差值的大小进行变化,以快速追踪到MPPT状态,同时也减小了功率震荡。仿真模型中将初始步长设置为0.2。
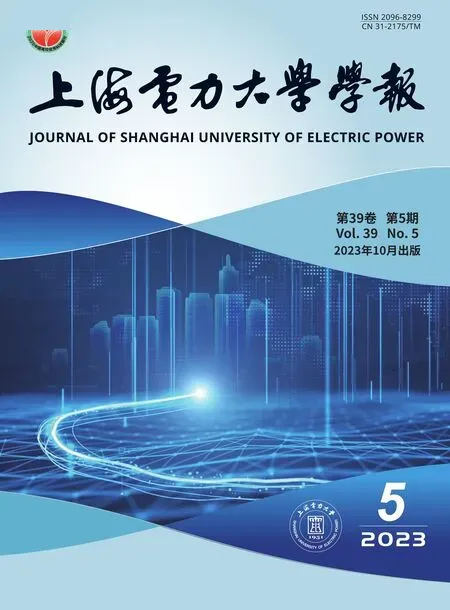
将搭建好的各个仿真模块封装,结合Boost电路模型,建立600 W光伏发电系统的仿真模型,如图4所示。其中,D0为变步长MPPT算法的初始步长值。
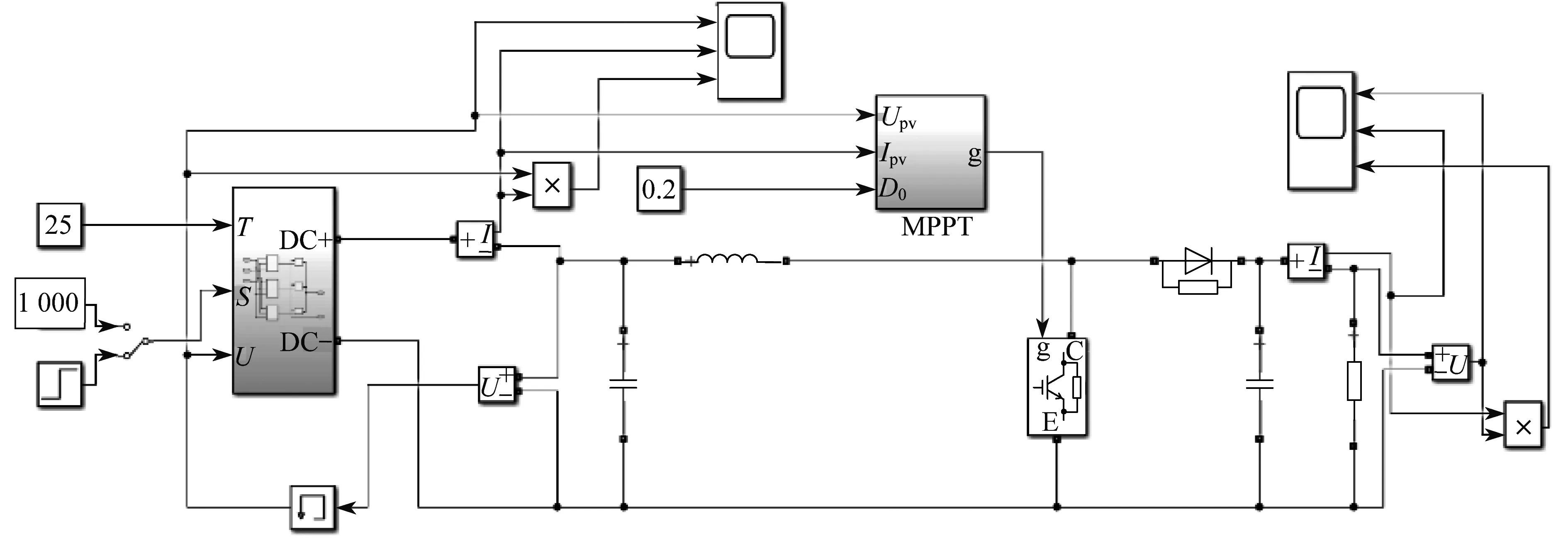
图4 600 W光伏发电系统模型
2.3 储能系统仿真模型的建立
储能系统是独立小型混合发电系统能量流动的核心,起到稳压和平衡功率的作用。该系统通过双向DC/DC变换器与直流输出侧之间实现能量的双向流动。
为了达到快速、有效的控制,维持直流输出侧电压的稳定,以确保负载端逆变电路的稳定工作,本文采用双闭环PI控制算法作为储能侧充放电的控制方法。该方法是由电压外环和电流内环组成的负反馈控制结构[8],电压环能够根据设定的参考电压值进行控制,电流环能够对输入电压值进行追踪,从而在短时间内跟踪到基准电压。
基于上述原理,将搭建好的双闭环PI控制算法模型进行封装,结合双向DC/DC变换器模型和蓄电池模型,建立储能系统的仿真模型,如图5所示。其中,Udc为直流母线电压;Ib为电池端输入电流;num (s)和den (s)为传递函数运算,便于之后的模块化算;U-dc、I-bt分别为Udc、Ib的传递函数;Pulse为得到的脉冲信号,由pwm引出;Pb为电池输出功率。基准电压设置为600 V。为了防止储能侧过充和过放,对荷电状态(State of Charge,SOC)设置限值:当SOC≥0.9时,储能侧停止充电;当SOC≤0.2时,储能侧停止放电。
2.4 柴油机发电系统仿真模型的建立
柴油机发电系统是独立多能源供电系统的能量补充。当风力发电、光伏发电系统供能不足时,柴油机发电系统可以及时补足能量缺口,承担系统主要的能量供应。
建立柴油机发电系统的仿真模型时,可将其结构简化为柴油机、同步电机、励磁系统及燃油箱[9]。同步电机的仿真模型采用Simulink平台自带的Synchronous Machine模块,其所需的励磁电压由Excitation System模块提供。柴油机的仿真模型可以等效为同步电机的控制系统,为其提供机械功率,同时受到耗油量的限制。控制系统等效模型和柴油机发电系统仿真模型如图6所示。
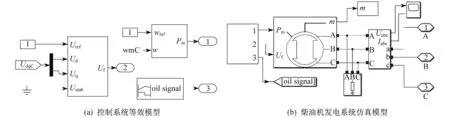
图6 控制系统等效模型和柴油机发电系统仿真模型
图6(a)中,为了控制结构的完整性,将励磁模块也加入柴油机模型中。其中,UdqC为从m端引出的电压信号(电机内部的定子电压值);Ud、Uq为定子的直、交轴电压信号;Uref为基准值;Ustab为稳定电压,可提升系统振荡稳定性,该端口未使用(已接地);Uf为励磁电压;wref为转速基准值;w为实际转速;Pm为电机机械功率;oil signal为油量信号。
图6(b)中,将柴油机模型封装,结合同步电机模块建立了柴油机系统的仿真模型。其中,Uabc、Iabc为三相电压和电流。
2.5 风光储柴供电系统总体仿真模型
将前文搭建的各个发电模块进行封装,结合负载端逆变电路模型建立900 W负载的风光储柴供电系统整体的仿真模型,如图7所示。其中,A为舱内振幅,breaker为三相开关触发条件,T为舱内温度。
图7 风光储柴供电系统总体仿真模型
图7中:左半部为风力发电、光伏发电系统与储能系统的封装模型;下半部分为柴油机发电系统经过三相开关连接至交流母线;右上部分为模拟浮标舱内高温和震荡环境的仿真模型以及示波器模块的封装模型,示波器模块用于监控系统运行时各个环节的工作状态。系统中设计了两级负载,每一级为450 W。灰色模块为三相桥式逆变电路模型的封装。
3 能量管理策略
独立多能源供电系统的电能协调管理策略是维持发电侧、储能侧、用电侧正常工作的前提。海洋浮标供电系统的电能协调管理策略的制定原则在于对自然资源最大程度地利用,以提高发电效率、节约能源,同时确保负载按计划运行,完成观测任务。
由于浮标的舱体是相对密闭的空间,因此舱内气温高于外界环境。同时,海面的起伏会造成舱内震荡,需要加装海水冷却装置和减震器。柴油机安全工作的温度限值为50 ℃,减震器能够起作用的振幅限值为100 mm,舱内环境指标高于这两个值时不启动或关闭柴油机。风、光资源充足但舱内温度较高时,系统应将富余的能量用于维持冷却装置的运行,尽量使储能元件和柴油机的工作温度保持在合适的范围内。
依据上述原则制定的供电系统电能管理策略如图8所示。图8中,Ppv为光伏阵列的输出功率,Pload为负载功率,Pc为冷却系统功率,DG(Diesel Generator)表示柴油机。

图8 供电系统能量管理策略
由于光伏发电系统的输出较为稳定,因此将光伏发电量是否满足负载需求作为系统运行策略的首要判定依据。光伏发电量满足负载时,判断蓄电池荷电量SOC是否达到上限值(0.9),未达到则充电;达到上限值则判断光伏和风机的总发电量是否有余量供给冷却系统,若不满足则接入卸荷。
光伏发电量不满足负载需求,但与风机共同提供的电量充足时,光伏工作于MPPT状态,此时系统运行状态与光伏单独满足的情况类似。若自然资源不足,风机和光伏的发电量不够,则两者均工作于MPPT状态。此时,判断蓄电池荷电量SOC是否达到下限值(0.2),未达到则参与供电;达到下限值时,判断柴油机是否满足启动条件。当振幅A≥100 mm,则切除部分负载;A<100 mm时,若舱内温度T<50 ℃则启动柴油机供电,若T≥50 ℃则切除部分负载,确保冷却系统运行,温度降低至正常指标后再启动柴油机。
4 仿真结果分析
根据上述能量管理策略,开展复杂工况下的运行仿真实验,系统的运行状态仿真波形如图9所示。

图9 供电系统运行状态仿真
由图9可以看出,风机的输出功率具有一定的波动性,而光伏阵列的输出功率较为稳定。系统开始运行时,风机在0.1 s左右完成启动,初始风速较低,风机输出功率大约为200 W;初始光照强度为额定值,光伏阵列的输出功率达到了最大值600 W。系统接入一级负载,需要450 W供能,多余的能量流入储能环节,经过0.2 s左右储能系统运行稳定后吸收约350 W电能,系统功率达到平衡。
t=1 s时,随着风速的增大,风机输出功率达到了额定值650 W,光伏阵列的输出功率保持不变,稳定在600 W,储能系统加速充电,吸收功率为800 W。
t=1.5 s时,光照强度变弱,控制系统迅速响应,在0.1 s内完成对最大功率点的追踪;稳定后,光伏阵列提供的功率减小至230 W左右,储能系统吸收功率约为430 W。
t=2 s时,系统接入二级负载,所需能量达到最大值900 W。此时风机、光伏阵列提供的功率已经无法满足需求,由于此时舱内振幅较大,柴油机无法启动,储能系统参与供电,提供大约20 W功率,功率基本达到平衡。
t=3 s时,舱内振幅A<100 mm,温度T<50 ℃,启动柴油机参与供电,负责全部900 W的负荷供能。刚并入交流母线时,由于相位、电压不同,功率曲线存在一定的波动。柴油机启动时,冷却系统同时投入运行,舱内温度在略微升高后逐渐降低。风机、光伏阵列负责为储能系统充电。
t=4.8 s时,负载切除,柴油机停止运行。由于储能系统电量并未充满,风机和光伏阵列继续为其供电,吸收功率约为880 W。
5 结 论
本文结合MATLAB/Simulink平台为大型海洋浮标设计了一套风光储柴综合供电系统,能够在复杂海洋环境下稳定运行,为大型浮标的供电系统研究提供了参考。通过在复杂工况下的仿真实验,得出了如下结论。
(1) 风机和光伏阵列运行时的功率波形与理论配置的容量一致,同时整个系统运行过程中始终保持功率平衡,验证了模型的正确性。
(2) 风速和光照强度变化时,风机、光伏阵列的控制系统能够做到快速响应,输出功率经过短暂的波动后迅速达到稳定状态,储能系统也能够及时参与调节,验证了控制算法的有效性。
(3) 实验结果验证了能量管理策略的可行性,发电系统能够在复杂工况下稳定运行。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09
家教世界·创新阅读(2023年2期)2023-06-07
家教世界(2023年7期)2023-03-22
家教世界(2023年4期)2023-03-04
煤气与热力(2021年6期)2021-07-28
汽车与新动力(2019年5期)2019-11-07
汽车观察(2019年2期)2019-03-15
通信电源技术(2018年3期)2018-06-26
能源(2017年12期)2018-01-31
电源技术(2016年2期)2016-02-27