两足教育机器人的历史发微与设计逻辑
2023-11-04 05:58:00刘秉新张蓉菲谢中取
现代远距离教育 2023年4期
公 雪,刘秉新,张蓉菲,谢中取
(1.江南大学,江苏 无锡 214000;2.东北师范大学,吉林 长春 130000;3.南京理工大学,江苏 南京 210000)
一、引言
教育机器人作为未来智慧教育的新型辅助形式,是教育改革的重要抓手之一。2021年12月,工业和信息化部、国家发展改革委等15个部门颁发的《“十四五”机器人产业发展规划》中提出:为推动“机器人+”应用行动,在教育类行业应深耕并推进机器人应用场景开发以及相关产品示范推广[1]。党的二十大报告明确提出,要以《中国教育现代化2035》为基础,将教育、科技、人才摆在重要位置。2023年2月,教育部及信息化部等十七部门联合印发了《“机器人+”应用行动实施方案》,明确提出积极培育“机器人+”校园服务新形态[2]。此外,随着现阶段教育供给量攀升,涌现出区域性教育资源分布不均、教育质量不平衡等一系列问题。作为教育机器人的一种新型类型,两足教育机器人在仿真行为、社交交互能力及空间感知导航方面比其他类型教育机器人智能程度更高。两足教育机器人在丰富专业化课程新颖性、扩大教育资源覆盖面、辅助教师教学、推动终身学习、捕捉学习者多元差异并提供个性化辅导等方面存在巨大优势。其一,两足教育机器人可以满足学生情感互动需求,增加学习趣味性和学生参与度。其二,可以减少教师重复性工作,快速响应不同学习场景,成为教师的教学助手。其三,在智慧教育中可以实现跨时空学习,补位家庭环境、自学场景中知识传授者角色,打破学习时空限制。其四,两足教育机器人使学习者在不同阶段、不同学习程度的基础上均可平等、灵活地开展学习,利于学习者按需探索学习方式,推动学习者持续性终身学习。因此,两足教育机器人在推动新型智慧教育生态构建等方面具有一定的优势,对推动个性化教育也具有积极意义。但两足教育机器人功能技术和设计逻辑方面仍处于发展阶段,且在融入未来中小学智慧教育的实践应用层面仍处于探索阶段。
故此,通过梳理两足教育机器人历史衍变脉络,进一步审视两足教育机器人的设计逻辑衍变与未来智慧教育发展间的关联,探寻未来教育生态新模式的实践价值,推动两足教育机器人在未来智慧教育中的系统化和专业化应用。从两足教育机器人历史衍变的角度来看,其现阶段的产研设计逻辑仍存在缺乏教育场景标准化设计规范、多维教育群体与人机交互技术缺乏适配性等方面的问题。所以说,两足教育机器人在教育领域的进一步产品化推广与落地,需通过设计、历史和教育多维视角来深度介入到两足教育机器人的产品开发与实践应用之中。这既是智慧教育生态创新发展的实践理路,也是多维度解决“人”与“机”教育信息化互动关系的现实转向。
二、两足教育机器人的历史发微
两足教育机器人(Biped Educational Robot)是指外观与功能被赋予拟人化形态且应用于教育领域的具有两足行走能力的机器人,此类机器人通过情绪、语言以及行为模式与学生进行交流互动,旨在丰富教学模式并激发学习者的学习兴趣,进而为智能教育带来新的可能性[3]。两足教育机器人的发展衍变分为两个方面。其一,从机器人发展视角来看,两足机器人(Biped Robot)作为能够进行复杂交互行为的机器人,其应用范围从实验研究领域逐步转移到教育和家庭领域[4],为老人[5]、学生[6]以及特殊人群提供教育辅助或指导[7],进而衍生出两足教育机器人。其二,根据移动方式衍变来看,教育机器人可以分为足式教育机器人、轮式教育机器人和非移动式教育机器人。其中,足式教育机器人又包括两足教育机器人及其他多足教育机器人。两足教育机器人的行走自由度分布和形态与人最为相似,易在教育环境中与学习者产生情感联结。近年来,国内外专家学者对两足教育机器人开展了多维度、多视角的研究与分析。通过检索国内外数据库相关关键词与系统梳理文献资料,可以发现两足教育机器人是两足机器人和教育机器人交叉发展并深入到教育领域的体现,它通过对人的物质性模仿,为用户提供智能化的社交功能,在语言学习、实践活动、讲故事等[8]教学环境中扮演助教、学习伙伴以及导师的角色[9]。从功能和需求上来看,两足教育机器人在教育领域的应用主要集中于帮助学生建立个性化学习环境[10]、协助教师强化互动教学关系[11]、作为智能教师代理教学任务、辅助家长在家庭环境中陪伴、辅导学生练习和完成作业等五个方面[12]。回溯历史,针对两足教育机器人的历史发展时期、教育功能应用方式、机器人在教育中角色衍变的不同,将其历史衍变分为三个主要阶段,分别为初级探索阶段、交互增强阶段以及智能拓展阶段(表1),其教育功能逐渐扩展,由早期特定教育工具到“人机协同”应用教育、再到个性化辅助教育功能。
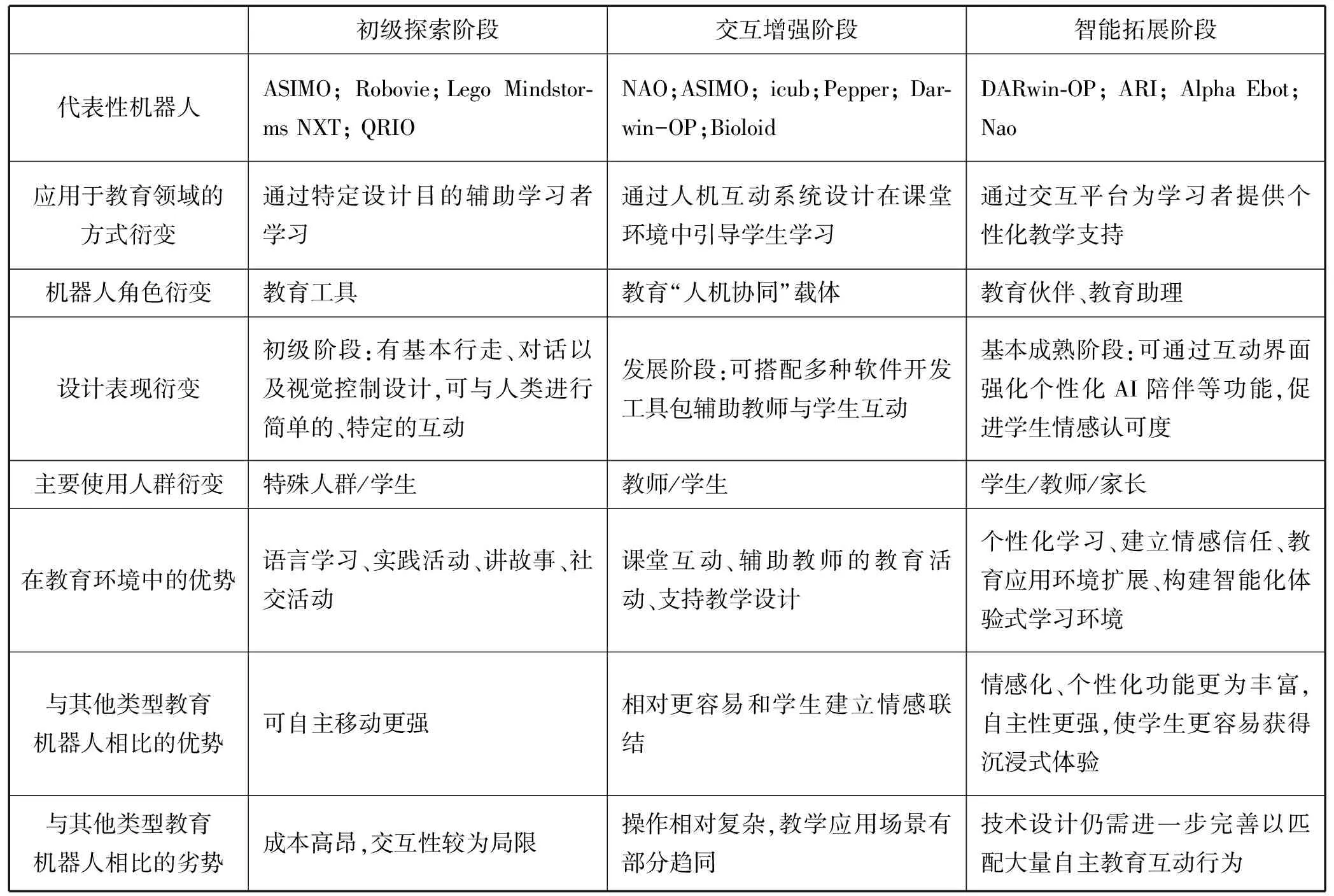
表1 两足教育机器人的历史衍变阶段
第一阶段为初级探索阶段。这一阶段的两足教育机器人仅可通过特定设计目的编程来辅助学习者进行单一化的基础性学习。1970年,日本早稻田大学创造了第一个两足机器人WABOT-1,具有对话、行走以及视觉控制系统[13]。1986年,日本本田公司开始开展两足机器人的相关实验[14],随后,在2000年开发的ASIMO机器人可进一步在特定环境中执行复杂任务,后逐渐应用于教育领域[15],这标志着两足教育机器人正式出现。两足教育机器人的基础性功能实验开始出现,如2000年ASIMO,2004年Robovie、Lego Mindstorms NXT以及2005年QRIO等两足教育机器人被设计为辅助特殊儿童完成重复性、基础性的特定任务[16]、辅助语言学习[17]、讲故事[18]、辅助自闭症儿童社交[19]等,这对于优化教育互动体验[20]、培养学生解决单一或特定问题能力[21]等方面具有积极意义。本体形态设计对教育的支持程度来看,这一阶段两足教育机器人配备了麦克风、扬声器以及触觉传感器等基础语音设备与人类互动[22],主要强调在特殊教育中培养特殊学习群体的语言学习行为。其他类型的教育机器人相比,此阶段的两足教育机器人可自主移动性高于其他形态的教育机器人,但两足教育机器人的硬件、软件程序的设定以及交互设计的流畅性等方面仍处于初级阶段,其定制过程复杂、设计成本高昂,且尚不足以满足人类更为复杂的交互性教育需求。
第二阶段为交互增强阶段。这一阶段的两足教育机器人开始作为“人机协同”载体在特定的课堂环境中引导学生的学习行为,并开始关注交互性教学功能。两足教育机器人开始逐渐作为特定的辅助工具参与到实际教育环境中,人机交互(Human-Computer Interaction,简称HCI)设计成为这一阶段关注的重点[23]。比如,法国阿尔德巴兰公司(Aldebaran Robotics)2008年研发的NAO、日本软银集团和法国阿尔德巴兰公司在2014年联合开发的Pepper等两足教育机器人,教师开始通过两足教育机器人与学习者进行特定的交互式学习活动,比如语文课朗读、数学课等辅助提问[24]。这一阶段通过物联网将课堂环境与机器人、教师以及学生串联在一起,构建新型“双师课堂”[25]。从本体形态设计上来看,两足教育机器人增加了电动机、LED灯、压力传感器等硬件设备,但操作系统对于非技术型用户来说学习成本较大。随着教与学模式的不断改革,教育群体对教育服务多元化的需求更为具体,相对于其他形态的教育机器人来说,两足教育机器人的两足形态更容易和学习者产生情感联结,获取学习者情感信任,从而推动教育教学活动的开展,但这一阶段的设计中缺乏对两足教育机器人作为教育学伴角色的设定,未满足学习者的多元差异性学习需求。两足教育机器人现阶段的开发多是根据具体的课程进行特定的教育功能设定,多为实验性的参与,其适用性特征相对局限,两足教育机器人与其他类型教育机器人的功能上存在一定趋同性。
第三阶段为智能拓展阶段。随着人工智能(AI)、云服务、机器视觉等技术的发展成熟,这一阶段的两足教育机器人在教育场域中的应用性趋于多元化。两足教育机器人可自主动态识别学习者的学习进度,针对学习者的学习行为进行个性化设定,其教育应用场景由课堂向家庭教育环境、自主学习环境扩展。2016年以来,两足教育机器人通过交互平台为学习者提供个性化教学支持。这一阶段,新的两足教育机器人开始涌现,如我国优必选公司在2016年推出的Wlak X 和在2018年推出的Alpha Ebot等两足教育机器人开始作为“AI”教育学伴投入市场并批量化生产。此外,ASIMO、NAO等两足教育机器人也进一步更迭并创新了两足教育机器人在多元教育生态中的适配性。这一阶段的ASIMO和NAO可通过可触控屏幕反馈、语音情感交流、交互操作平台等方式促进学生个性化学习[26]、建立情感信任[27]以及构建智能化体验式学习环境[28]。在设计方面,两足教育机器人的用户操作设计相较于前两个阶段更加流畅并贴近用户实际需求。由此,“人”与“机”的关系通过设计的桥梁实现了更有效的互动与对话。但两足教育机器人作为“机器”,在进入实践智慧教育环境中的身份问题、情感问题、技术问题仍值得进一步讨论。
整体来看,通过历史向度梳理,两足教育机器人作为一种具有自主情感认知的人工智能教育产品,在教育教学中比其他类型教育机器人的自主性、智能性和情感互动性更高,可应用于更广泛的教育教学场景中。然而,现阶段教育教学环境中对两足教育机器人的实际应用仍处于发展阶段。一方面,两足教育机器人的应用仍处于“操作扫盲”阶段,学校、教师、家长和学生对于两足教育机器人的操作互动逻辑较为陌生,在教育教学环境中的应用仍停留在技术学习阶段,比如,如何和两足教育机器人进行交互、如何在课堂或家庭环境中有效应用两足教育机器人等。另一方面,两足教育机器人情感互动的技术仍处于发展阶段,其用户操作界面的设计、智能化技术的迭代、情感认知、深度学习算法与技术等仍需进一步适配教育教学环境,辅助多维度教育场景效能。随着教育数字化转型,两足教育机器人和学习者的交互性越来越强,人机互动对新型教育改革具有一定创新价值,故此,对两足教育机器人在教育教学领域的实践应用亟待得到进一步重视,通过智慧教育和设计逻辑的桥梁,建立起学习者、教育者与两足教育机器人之间的情感化多维交互。
三、两足教育机器人典型案例的设计逻辑
基于上述对两足教育机器人历史衍变回顾,进一步拆解两足教育机器人设计逻辑,纵览历史发展路径,为两足教育机器人在智慧教育领域中的实践应用奠定基础。两足教育机器人作为一种较为年轻化的未来智慧教育产品,对其本体形态的设计直接影响到两足教育机器人的可操作性,对其关键技术的创新与更迭可以确保机器人的稳定性和安全性、便于更安全地实现特定教育目的,对其智能要素的考虑是确保两足教育机器人可以在发展中不断满足不同教育教学环境中个性化需求。所以说,为更好地适配未来智慧教育教学场景,两足教育机器人在开发设计阶段应遵循本体形态(包括硬件设计和外形设计)、关键技术(包括步态规划、操作系统和应用场景)和智能要素(包括语音交互、界面交互和情感交互)的基本设计逻辑来更好地适配未来智慧教育,构筑未来新型教育生态模式。根据设计典型性特征和市场应用率筛选[29],以ASIMO[30]、NAO[31]以及Alpha Ebot[32]三款涉及学校教育和家庭教育双重教育场景的两足教育机器人作为典型案例,结合两足教育机器人辅助教育教学属性,持续培育两足教育机器人深入“家校社”等多维度教育场域中辅助学习者个性化学习,以期为两足教育机器人产品研发落地提供逻辑参考。
(一)本体形态:硬件外形对教育主体信任感建立
两足教育机器人的本体形态包括硬件设计(传感器、处理器)和外形设计(身高、重量、体型设计),其拟人化的外形和情感化的互动是两足教育机器人与教育者、学习者进行交流的智能优势。两足教育机器人作为工业制品,其外形的设计直接影响到参与人机互动的受教育者听、触、视觉的感觉体验[33]。两足教育机器人的本体形态是其面向学习者的第一视觉效果(表2),也是两足教育机器人区别于其他形态教育机器人最明显的特征。
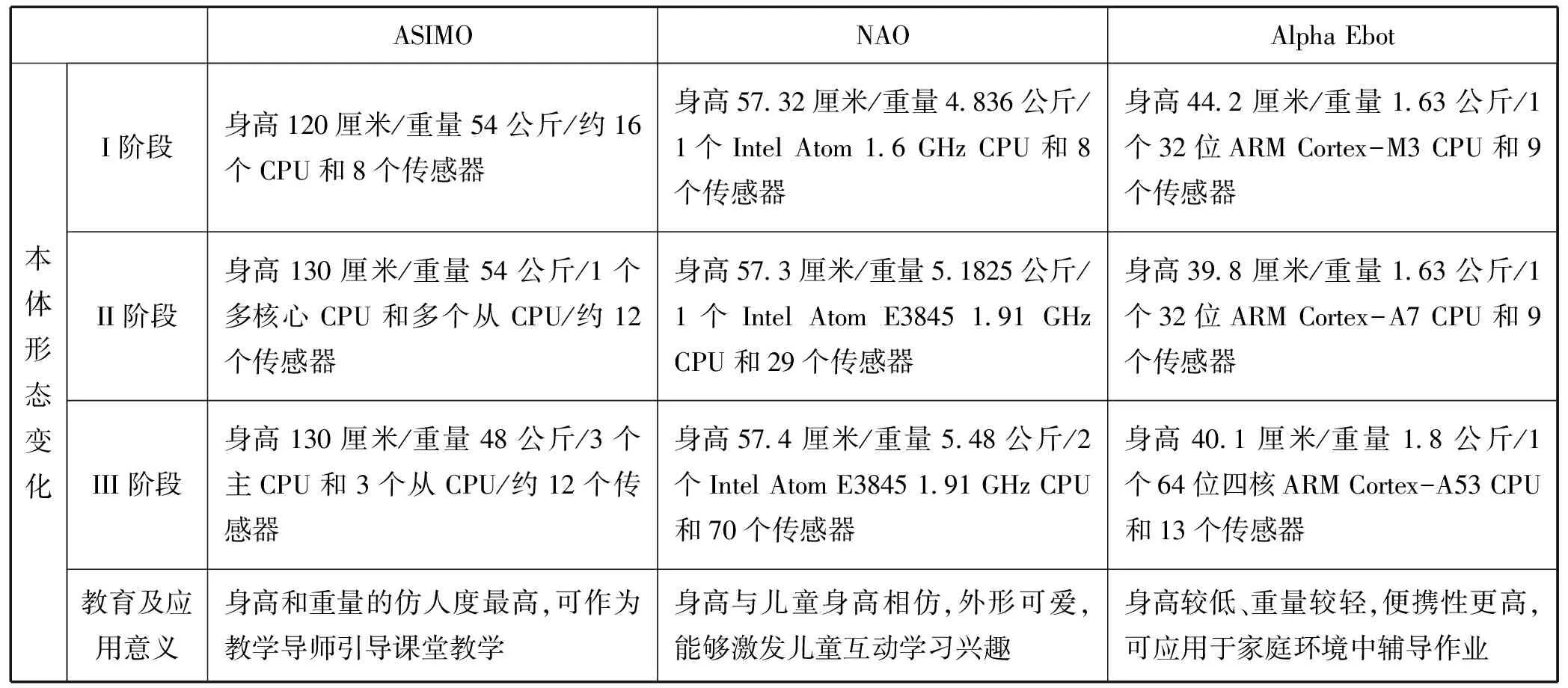
表2 两足教育机器人典型案例本体形态历史衍变对比分析
ASIMO、NAO及Alpha Ebot机器人的本体形态的历史衍变具有一定设计逻辑和规范。首先,从身高和重量来看,NAO和ASIMO的设计更趋于对人生理状况的迎合,而Alpha Ebot则更多的是关注便携性的商业化维度。NAO的高度平均值约为57.34厘米,这在三类两足教育机器人中,是与儿童身高最相似的高度,符合人体工学设计的情感化需求。而ASIMO的高度基本固定在130厘米,这个身高设定可使成年人坐下时与ASIMO视线高度保持一致[34],有效扩宽了两足教育机器人的受众群体,使两足教育机器人可以作为教育导师辅导学生学习或应用于高等教育环境中。而优必选Alpha Ebot作为主要面向家庭STEM教育市场的教育机器人,其机器人平均身高和重量远低于ASIMO和NAO。这个身高和重量不仅利于Alpha Ebot与儿童互动,也体现出在家庭环境使用中的便携性和安全性。其次,从外形来看,三款机器人的外形都趋于人类的肢体几何尺寸设计,其中ASIMO的外形设计在每个阶段中的细节调整最多,比如腰部曲线、腿部线条等,逐渐呈现出人体工学的曲线设计美感。最后,从硬件设计衍变来看,ASIMO、NAO以及Alpha Ebot机器人的中央处理器(Central Processing Unit,简称CPU)由单核逐渐升级到多核处理器,且传感度数量越来越多,这使两足教育机器人可以更为精准地感知环境,提升运动控制精度和速度,为突发性教学问题提供更快捷、更敏锐的反应,为感知学生情绪变化提供快速响应,正确引导学生学习情绪,给予快速的情感反馈。
故此,用户的感知意象与工业设计产品特征、设计细节的变化之间存在正相关关系[35]。将学习者、教育者的教育教学常态以及“拟人化”日常行为方式融入到两足教育机器人的外形技术逻辑之中,是将“人性化、曲线美”的设计思维融入到用户情感化、人性化体验中的有效体现。以用户为中心的本体形态设计逻辑更贴合用户情感需求,成为介入教育场景应用的关键痛点。
(二)关键技术:步态规划对学习者沉浸感的增强
两足教育机器人的关键技术从技术算法(步态规划、自由度设计、控制系统)以及应用场景两个维度得以体现,这是两足教育机器人为学习者构建沉浸式学习环境的优势所在。随着AI技术、机器视觉、仿生科技以及硬件的不断更迭,两足教育机器人的整体性能与应用场景呈现出更人性化的发展趋势,教育技术的应用场景随之发生转向[36]。随着技术进步,两足教育机器人的产品更迭速度较快,其在教育环境中为学习者以及教育者提供了全新的教育互动场域。通过分析两足教育机器人技术算法与应用场景的发展变化(表3),进一步透视其技术应用特征与发展趋势,利于激发沉浸式同伴学习效应。

表3 两足教育机器人典型案例关键技术历史衍变对比分析
两足教育机器人作为具有说话、行为逻辑且可以自由行走的机器人,在和学习者进行互动的时候,良好的体验感和互动性是学习者在学习场景中与之产生联结、建立信任的基础[37]。首先,步态规划作为两足教育机器人的关键技术,可以指定机器人运动轨迹,为两足教育机器人的步态设计、动态平衡和实施路径规划提供策略和控制设计[38]。步态规划功能的研发是两足教育机器人具有“拟人化”特征的技术基础。从三者纵向发展来看,ASIMO功能最强大,衍化至第III阶段时,其自由度灵活度可达到57个自由度(Degree of Freedom,简称DOF),步行能力较强,情境适应能力较强,在复杂环境中可较快适应不同课堂环境并与学习者进行交互[39]。ASIMO、NAO和Alpha Ebot的步态规划功能均为其设计中的重要一环。ASIMO和Alpha Ebot均是基于零力矩点(Zero Moment Point,简称ZMP)步态规划[40],NAO是基于静态步态规划[41]。采用ZMP步态规划可以使ASIMO和Alpha Ebot在行走或奔跑中保持更高的动态平衡,可以灵活处理教学环境中出现的紧急状况,而NAO则更多是进行基础稳定行走,安全性更高。两足教育机器人的自由、自主行走能力使其更接近人类的步行形态和行为表现。两足教育机器人利用步行能力更加灵活地移动和调整位置,以此增强学习者与机器人之间的及时互动,从而更容易被学习者接受,帮助学习者更积极地参与学习过程,提升学习效果。
其次,从两足教育机器人应用场景与目的来看,虽三类两足教育机器人均为教育服务,但各自在教育场域中的侧重点有所不同。在家庭环境、课堂环境等不同应用场景中,这三类两足教育机器人的行为意识与情感反馈均体现出个性化倾向。具体来看,ASIMO的应用场景较为广泛,涉及大学教育、中小学教育、职业教育等,可作为具有社交属性的教育机器人与学生合作学习并辅助教师上课[42]。NAO开发兼容性最强且具有配套的NAOqi开发操作平台[43],可通过虚拟现实技术与机器人操作系统结合,远程控制NAO机器人作为教学导师的身份进行教学活动。此外,NAO的控制系统可实时更新升级,使NAO系统中的教育资源保持新颖性和先进性。Alpha Ebot体型最小质量最轻,作为消费级别的家庭两足教育机器人,更容易以高性价比的形式进入教育市场,提升家长购买欲与儿童体验感。所以说,关键技术的更迭变化与两足教育机器人的应用需求也密切相关。隐式信息交流带来的技术上的更迭可以很大程度上满足用户的情感化需求[44]。两足教育机器人通过步行运动和应用场景的设定、模拟真实场景、增强学习者的沉浸感和体验感等进一步提高教育质量并丰富课堂趣味性。
(三)智能要素:人机互动提升情感化教育适用性
两足教育机器人的智能要素包括人机互动、感知交互以及教育适用性。两足教育机器人通过语音交互和界面交互两种方式来适应多种人机环境,满足多场景化教育适用性特征。用户界面(接口)设计(User Interface Design,简称UI设计)是人机交互的情感化渠道,两足教育机器人的语音对话系统、社交信号处理系统以及UI设计是其参与教育互动的重要元素[45]。UI设计是学习者和两足教育机器人之间产生“教”与“学”交互行为的第一视觉画面,用户操作界面是通过人机交互时的触碰和反馈来模拟物质性交互过程[46]。
将ASIMO、NAO以及Alpha Ebot操作界面与人机环境进行对比分析,以厘清两足教育机器人在教育适用性中的情感化因素。具体来看,ASIMO的操作界面(图1-a)是基于绿野仙踪(Wizard of Oz,简称WOZ)平台开发的,开发人员通过操作台和便携控制器可以进行远程控制与指导、修正机器人互动行为[47]。ASIMO的感知能力较强,教育者或学习者可以通过语言识别、行为互动等AI技术与ASIMO进行直接的语音互动、行为互动,ASIMO在与学习者互动中呈现出多模态情感化交互行为。NAO的UI设计(图1-b)逻辑性较为清晰,操作人员可以通过更便捷、易操作的方式对教育机器人的交互行为进行编辑与设定,比如跳舞程序的设定、提升教师对教育内容管理界面的可操作性等[48]。最后,Alpha Ebot的用户界面(图1-c)作为一款面向家庭STEM教育的交互性界面,可以快捷地进行基于触控屏的命令交互和语音交互。相对于ASIMO和NAO,虽然Alpha Ebot的智能性偏弱,但其界面设计的易操作性与可用性更强。操作屏幕上明显且直接的操作按钮、视觉一致的信息控件以及明确的交互目的引导是提升学习者等多维群体用户体验的基础[49]。Alpha Ebot的用户界面以有趣的图标吸引儿童兴趣,再通过蓝色系的界面配色使之具有科技感和未来感,进而为非正式化教育带来愉悦的体验感。同时,从人机环境来看,其操作界面引导流程设计较为清晰,可以有效提升学习者或家长与两足教育机器人的互动,营造轻松、互动性强的情感化人机学习环境。所以说,情感化互动可以通过人机界面、界面色彩、图标设计等设计元素的优化来转移学习者的正反馈情绪[50]。两足教育机器人智能要素设计同样是情感化教育适用性的设计。三类两足教育机器人分别以多模态情感化交互、语音交互、命令交互等不同的感知交互模式来匹配不同的教育场景,使两足教育机器人在历史衍变中不断满足教育服务中的各类需求,提升了两足教育机器人在不同时空、不同场域中的教育适用性。
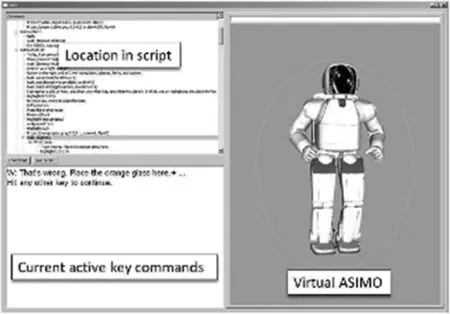
图1-a ASIMO Wizard-of-Oz的UI设计

图1-b NAO 的UI设计

图1-c Alpha Ebot 的UI设计(引自www.ubtrobot.com/cn/products/e-bot/)图1 两足教育机器人UI设计对比图
两足教育机器人的情感化特征可以有效地为教育赋能并促进智慧教育发展[51]。两足教育机器人每一历史阶段的设计逻辑更迭都围绕着教育主体的“情感可交互性”进行不同层面的优化,从本体形态到关键技术再到智能要素,体现出开发者从只关注两足教育机器人的技术性逐渐发展至开始关注“教”与“人”情感化互动的变化。但在现阶段的实际应用中,两足教育机器人的设计逻辑在与学生、教师以及家长进行真实教育教学互动中仍存在一定的困境,对其实践应用仍处于浅层次范畴。
四、两足教育机器人的教育适配性实践困境
两足教育机器人在教育领域的应用与开发仍处于发展阶段,需通过设计思维与教育思维的不断融合与迭代促进两足教育机器人设计逻辑的开放创新。两足教育机器人在解决教育资源不足、平衡教育质量等方面存有巨大应用价值,在一定程度上利于新型教育生态模式的形成,但现有产品的设计逻辑在实践过程中仍存在一定的限制。遵循上述历史演变梳理以及设计逻辑的趋向分析,本论文将两足教育机器人的实践困境总结为如下四点。
(一)产品设计问题:两足教育机器人技术与教育需求融合不足
从上述历史衍变和设计逻辑的剖解中发现现阶段两足教育机器人本体设计和关键技术仍待进一步提高,存在标准化制定、步态稳定性、高精度感知交互、AI自主决策等方面的挑战。现阶段两足教育机器人产品设计尚未打破技术与教育需求间的壁垒,缺乏对学习者个性化需求的高度匹配。首先,两足教育机器人在不同环境中的步态行走仍会出现无法始终保持平衡等问题,对预测并平衡两足教育机器人在行走状态下稳定性的技术仍处于发展和测试阶段[52],与真实教育环境融合度不足。其次,两足教育机器人在复杂教育场景中的高精度感知和交互方面仍处于技术更迭阶段,比如存在在光线不足情况下对环境信息的处理速度有待提高、帮助学习者在复杂环境中进行实际操作时机器人传感器有限等问题[53]。最后,现阶段两足教育机器人的传感器技术、深度学习算法在人工智能技术上的应用仍处于测试和研发阶段,在面对学生突发性学习问题时,其AI自主决策能力有待进一步优化。整体而言,两足教育机器人缺乏对本体结构、外形特征等方面的标准化制定,无法大范围地投放和使用产品,尚不足以使两足教育机器人产品与实际的教育场景深度融合,导致两足教育机器人尚未批量化应用落地。
(二)操作逻辑问题:教师家长角色让渡为机器人单向度操作者
两足教育机器人在课堂场景和家庭环境的应用,使先验教师权威、家长使用存疑等方面受到一定挑战。教师层面来看,在人工智能时代,教师内部及外部均存在一定技术焦虑与忧思[54]。一方面,虽然在新型教育课堂中,两足教育机器人可以作为教学工具、伙伴或者导师的形式进入课堂,但教师依然会对教学过程的流畅性、操作的复杂性带来的额外工作量及伦理道德等问题有所顾虑。另一方面,由于智能化教育机器人的介入,会一定程度上导致师生情感缺位,不利于课堂环境中情感状态的及时表达与互动,教师担忧是否会成为单向度的操作者而不是课堂的主导者,进而导致教师身份和权威受到一定的挑战[55]。两足教育机器人以拟人形态量化了教学过程,虽然有效提升了课堂效率,但会逐渐僵化教师教学思维,使教师对课堂整体节奏把控以及师生关系的情感化交流方面产生负向影响。此外,智慧教育发展随之带来数据及伦理安全隐私风险也是两足教育机器人面临的挑战之一。家长层面来看,两足教育机器人在家庭范围的辅助性应用方面仍存在一些隐私边界以及操作与应用性问题。一方面在认知层面上,部分城市的家长仍对两足教育机器人在家庭范围内的应用持有消极态度,例如,在大数据时代,家长对两足机器人的眼部摄像头泄漏家庭隐私、操作人员远程私自访问数据信息等方面存疑。父母对学习者学习的关注程度与学习者对信息化教育模式的接受度之间呈显著正相关关系[56],换言之,父母对两足教育机器人的接受度会直接影响学习者在家庭范围内使用两足教育机器人进行学习活动的意愿。另一方面,操作层面上,现阶段缺乏对两足教育机器人操作的系统化培训。具有复杂社交与交互功能的两足教育机器人,可以以远程辅助教师教学的教育工具或家庭教育中的学习陪伴者这两种形态进入家庭,而现阶段两足教育机器人操作界面以及人机互动的过程中会涉及大量专业化程序设置与操作,这对家长来说同样具有一定挑战,这成为阻碍两足教育机器人在“家校社”等多维教育场域中跨时空应用的深层问题。
(三)学生互动问题:学生与两足教育机器人之间的情感距离
两足教育机器人作为理性的教育机器,通过程序的功能设定与复杂的情感交互功能与学生之间建立有效联结。但学生作为心智未完全成熟的个体,在教育环境中使用两足教育机器人会影响到学生情感伦理场域的变化与发展。情绪是人生来具有的生理性反应,在面对人工智能或在线教育环境中,学习者会出现一定的负面情绪[57]和情绪挑战[58]。所以说,有效的交互式情绪引导利于引发学生积极的情绪反馈并提升学习效率[59]。虽然两足教育机器人可以通过大量的人工智能学习以及数据挖掘等技术追踪和陪伴学生学习[60],但在这个过程中,学生的学习动机、情感价值观和学习目标均会受到不同程度的影响。此外,两足教育机器人智能要素的设计逻辑仍处于发展阶段,其情感识别、语音互动等技术的准确性仍有待提高,所以对于学生的突发情绪状况,如学习压力过大、学生思维盲区、学习注意力不集中等[61],两足教育机器人并不能做到及时有效的情感安慰和鼓励,不利于学生情绪的纾解与消化。两足教育机器人的个性化教学可以辅助家长或老师陪伴学生学习,有效提升学生的学习动力,但学生与两足教育机器人之间的情感交互建立仍存在一定的困境。
(四)应用场景问题:两足教育机器人缺乏多维度教育适用性
两足教育机器人作为教育教学交流的交互中介,在面对现阶段存在的教育资源不足和教学质量不均衡等问题时,两足教育机器人作为辅助教学的智慧工具,可以推动构建“家校社”多元融合的跨时空教育场域。然而在实际教育场景中,现阶段两足教育机器人智慧要素的设计逻辑多集中于对单一教育场景的应用适配,缺乏对整体教育生态模式的宏观把控,并未发挥两足教育对多元化教育场景的系统性联结作用。现阶段两足教育机器人产品设计尚未适配多元化智慧教育应用场景。其次,从单独的教育场景来看,两足教育机器人的发展亦存在一定的问题。其一,在学校教育环境中,两足教育机器人尚未具备独立承担教学任务的信息快速处理和及时反馈能力,无法承担独立“机师”教学任务,未充分发挥出新型智慧课堂中人机交互的感知性价值。此外,随着人工智能技术以及传感器等技术的不断完善,两足教育机器人已经可以独立承担起某一学科完整的教学任务,并成为辅助教师完成一门完整的教学任务的智能助手。而在“双师课堂”或“人师”为主导的课堂环境中,由于教师和学生仍处于传统课堂转型阶段,两足教育机器人仍在课堂中承担重复引导、问答互动等基础性功能应用[62]。这不利于新型智慧教育模式的构建,也无法使两足教育机器人对学生融入个性化学习发挥真实有效的作用。其二,在家庭教育场景中,由于开发人员对两足教育机器人课程程序的设定仍缺乏系统性和逻辑性,并未发挥出两足教育机器人的协同育人能力。其三,在社会性的自主性学习或者科普性教育活动中,两足教育机器人未得到有效应用。两足教育机器人现阶段多为以教师为主导的教学辅助工具的形式出现在课堂之中,并未将AI智能技术、智能教育数据融入到社会教育范畴,忽视了两足教育机器人对终身学习、持续性自主学习方面的作用。故此,虽然两足教育机器人可应用的教育场景较为广泛,但现阶段两足教育机器人在教育环境中仍处于浅层次应用,缺乏对更多维教育场景的实践性应用。所以说,两足教育机器人系统性的、多元化的教育设定仍需得到进一步开发与应用以提升其教育适用性。
五、两足教育机器人参与教育融创发展向路
对两足教育机器人的实践理路分析是审慎思考未来智慧教育发展向路的有效途径,也对进一步厘清两足教育机器人产品设计逻辑的未来发展路径、纾解教育机器人与教育主体之间的人机关系等方面具有实践与指导意义。基于上述提出现阶段两足教育机器人产品设计逻辑中存在的实践困境,进而提出两足教育机器人在未来产品研发中深入参与到教育融创的实践理路应聚焦于以下方面。
(一)构建协同平台,改进两足教育机器人的产研标准化和产品共创
随着“机器人+”行动的不断深入,通过对两足教育机器人本体结构、关键技术以及智能要素设计逻辑的优化创新,推动以人工智能技术支持为基础的两足教育机器人产研标准化发展,以此适应更广泛化应用,为家庭教育、学校教育以及社会教育融合协作的协调性转型提供智能化辅助载体。面对两足教育机器人产品尚未形成统一产品设计标准、各品牌的产品技术标准不一和互操作性较弱等问题,应积极建构多用户、多维度的教研产品协同研发平台,引入教师、家长、学生和学校参与产品共创机制,强化两足教育机器人的实际应用场景测试,探索两足教育机器人产品研发与教育教学场景关联,激发智慧教育信息化的新资源与新路径。第一,教研产品协同平台的建立可通过设计向度构建校务管理板块、教师教学板块、家长监控板块、智能反馈板块以及学生操作板块等五个板块,开发者和教育者可实时沟通和改进,推动技术创新并开展多维度评价决策模型,进而制定统一的两足教育机器人产品设计逻辑标准。这个过程需要“人-机-技术”进行共同协作,实现教育资源与数字资源、学习者与教育者、开发者与使用者、教育环境与两足教育机器人的良性循环。第二,党的二十大提出我国数字化教育新形态方面仍存在一定问题,需创新全链条的人才培养模式。这就促使在两足教育机器人这个智慧教育领域,应深化利用教研产品协同研发平台对教育资源、智慧技术进行有效聚合。这包括在自主学习中及时采集和分析学习者的教育课程进度以及学情薄弱环节、在家庭教育中及时敏捷智能反馈家长满意度与教师教学进度、在学校教育中促进校务部门可及时、灵动地进行宏观教育决策与情感化沟通。通过打破技术壁垒,为未来智慧教育生态系统的发展赋能[63]。第三,明确逆反馈机制,产研改进后要及时告知参与者,带动教育者与学习者主动参与研发过程。这不仅可以激发教育相关人员的使用意愿,而且可以使研发人员更了解市场教育需求,进而逐步优化产品研发、销售、使用和反馈、测试与升级等各个环节,建立良好产品应用闭环,提升两足教育机器人在教育市场的应用率。
(二)制定适用规约,架构教育者身份转型策略并提升其数据智慧
为缓解教师家长对两足教育机器人的操作问题、伦理道德和身份转换方面的忧思,应制定机器人适用规约,优化操作流程和标准化适用场景,增强教师家长与两足教育机器人交互积极性和信任,从而提升教师家长数据智慧。第一,建立以价值敏感性设计(Value Sensitive Design,简称VSD)为辅助的数据评估体系。VSD可以通过评估信息技术与人机交互中所存在的设计问题,及时迭代和更新情感交互方式,从而关照相关利益者的道德价值和隐私安全,建立人机边界意识,有效规避机器人决策出现越位风险。第二,制定教育场景适用规约,辅助精准教学。借助两足教育机器人“拟人化”的视觉、听觉、触觉以及交流功能,使两足教育机器人有标准地、有边界地参与教学大纲及教学策略的个性化制定过程,提升教师对课堂节奏的整体掌控力并优化教师操作技术效能感,赋能“双师课堂”。利用两足教育机器人为教师教学、家长教育、社会教育提供抓手,重构教师和家长为主导、两足教育机器人为辅助的不同学科下的特定教学环境和辅导功能,提升学生深度学习能力。第三,建立机器人伦理及教学数据库。在“机师”辅导为主的社会教育或自主性学习中,为机器人建立边界红线,以此强化两足教育机器人的个性化辅导和特定社交交互行为,进一步延伸学生课后学习习惯培养过程,带动学习者自主学习,减少教师和家长的重复性工作,使之产生信任感。第四,定期开展操作交流培训,帮助教师家长熟悉操作使用流程,使之科学掌握数据技术和操作规范。两足教育机器人应在遵循教学大纲以及课堂流程基础之上优化、简化交互逻辑,纾解教师家长技术操作焦虑。为了真正建立教师和家长对两足教育机器人的使用意愿,应重视两足教育机器人个性化辅助教学功能的迭代与适用规约制定,促进教育者权威智能化转型,构筑新型个性化智慧教育教学模式。
(三)加强情感互动,共创机器人与学习者“情感+教育”智能化转型
两足教育机器人的自主性和智能性是教育场域中人机交互情感化行为的基础。为了缩小学习者与两足教育机器人之间的情感距离,可借助两足教育机器人的多模态界面、智能传感器以及信息可视化等技术设备,动态捕捉学习者的肢体动作和即时教育场景,对其进行有效数字信息提取,做出即时决策并与学习者进行沉浸式交互行为。这个过程可实时智能反馈给开发人员、教师及家长,进一步从产品和应用效果两个层面优化学生在“教”与“学”场景中的情感化体验并利于教师和家长及时获取课程动态进度和学生学习状态。这使学生对两足教育机器人的应用具有积极向度反馈与信任建立,避免两足教育机器人的机械性、固化性的应用。智慧教育的数字化转型是构建未来教育新平台的有利支撑[64]。此外,两足教育机器人特有的多传感器、语音识别以及软硬件集成系统可以使两足教育机器人通过模糊情感决策和双峰情感识别模型建立情感反馈与识别,从而为智教互动空间提供精准化、智能化的教学模式。两足教育机器人融入课堂环境是其辅助教师完成智能化教学任务的有效途径,打破了传统教育的原有形态,形成“情感+教育”的新型智慧教育空间。教师在传统教学中易形成僵化线性教学思维模式,而两足教育机器人在课堂中的应用可纾解传统课堂中教师权威性带来的压力。通过大数据挖掘和多模态情感交互,及时关注学生学习进度和教学形态,成为学生和教师之间的情感纽带,利于学生与教师的良性互动与交流。为了真正实现学生为主的教学方式变革,两足教育机器人针对学习者不同需求,进行差异化、个性化的定制服务,将智能教育平台的打造、新型教育生态的构建、人机交互设计的更迭以及情感伦理的边界意识进行融合与创新,利于数字化教育的创新性发展。
(四)聚焦场景融合,构建跨时空协同智能教育的弹性教育新生态
人工智能技术正逐渐推动教育系统不断向学科融合的培养模式转型,为打破单一学科的知识壁垒,拓宽两足教育机器人跨时空应用场景,应充分发挥两足教育机器人作为智能导师的引导作用,逐步消解教育资源不均、学科发展不平衡等问题。两足教育机器人的多元化、多学科应用,利于优化个性化教学体验,有效拆解、聚合学科特点,细化教学规范与功能。第一,学校环境中,教师需要结合智能导师系统、教育数据以及智能教育平台等方式,将两足教育机器人作为教育资源平台,发挥其大数据筛选优势,帮助教师智能优化教学策略,提供交叉学科教育资源,推动两足教育机器人深层次、多元化地融入到教育教学中。从而建立教师为主、两足教育机器人为辅的智慧“双师课堂”模式,提升智慧适应性教学质量,优化学生学习体验。第二,在社会及家庭环境中建立智慧教育评估机制。通过多模态交互技术创新对学生进行个性化、多元化地辅导与评估,使两足教育机器人与学生灵活、高效地交互。通过对两足教育机器人有限制、有边界的功能设定,提高其独立辅助学生学习任务的能力,使学习者可以不限时间、不限空间地进行自主学习。这不仅利于促进学习者培养并保持终身学习、个性化学习习惯,也适用于科普性、重复性教育活动,起到协同育人的作用。第三,通过无记名意见箱、课堂实际应用操作调查等方式,重视教育者和学习者意见,积极迭代两足教育机器人产研设计,构建多元教育群体与两足教育机器人的跨时空协同智能教育模式。通过对学习者和教育者双向评估,不仅可以改进教学策略,优化学科融合的教育内容,亦可推动两足教育机器人产品与教育环境的适配度,从而构建多元弹性教学新生态。
六、结语
两足教育机器人作为教育机器人的新型衍生形态,其两足形态及情感化功能对构建新型智慧教育模式、迭代数字化教育思维方面具有创新性意义。两足教育机器人作为新型智能教育载体,基于对其历史衍变及现阶段产研设计逻辑的剖解与思考,对“机器人+”在智慧教育领域的深耕与应用具有指导性意义。对ASIMO、Nao以及Alpha Ebot产品案例设计逻辑的解析,不仅发现了现阶段产研中存在的问题和此类产品在教育场域中的优势,也在一定程度上回应了两足教育机器人在未来教育应用中的可行性,利于智能教学方法的创新以及新型教育生态的构筑,具有实践和理论双重价值。与其他形态教育机器人相比,两足教育机器人本体形态具有“拟人性”优势,能够更好地捕捉学习者学习情况,进行情感互动并产生正向度学习反馈。此外两足教育机器的步态规划技术和复合型多学科融合功能与实体教学环境匹配度更高,利于跨时空教育场域弥合。通过对现阶段产品设计逻辑在现实应用中存在的技术层面、操作层面、互动层面和应用层面实践困境的分析,进而提出两足教育机器人产品未来的实践理路不仅应重视其在教育领域的应用范畴、技术操作、软硬件合理迭代与创新等方面技术要素的更迭,也应关照伦理道德、人机交互以及情感可信赖性等精神要素的合理应用。两足教育机器人未来产研设计中应逐步增强其感知能力和智能水平,加强多模态情感化交互,丰富其教学应用场景。人工智能教育的智慧化特征为两足教育机器人产品应用落地提供了有力抓手,为人工智能教育的应然转向提供了一定的思考。以此促进两足教育机器人在“家校社”多重教育场域中的进一步情感化、智能化应用,构建人机协同新型智慧教育的新范式。
猜你喜欢
学生天地(2020年15期)2020-08-25 09:22:02
意林·少年版(2020年2期)2020-02-18 11:14:52
艺术启蒙(2018年7期)2018-08-23 09:14:18
海峡姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
海外华文教育(2016年4期)2017-01-20 08:22:24
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19