
无人机充电仓多块锂电池充电策略的研究*
2023-11-03 08:49史志勤张智豪杨张鑫潘丽平
南方农机 2023年22期
史志勤 ,张智豪 ,凌 凯 ,杨张鑫 ,丁 菊 ,潘丽平 ,汤 娄
(南通理工学院电气与能源工程学院,江苏 南通 226001)
0 引言
随着中国经济的快速发展和人口的迅速增长,对能源的需求量越来越大,能源消耗大幅增加,传统能源资源日益减少,已经不能满足国民经济发展的需要[1-3]。在荷兰、德国等许多国家,太阳能已成为商业化程度最高、利用最广泛的可再生能源之一,光伏无人机的研究也应运而生[4]。光伏无人机结合了光伏和无人机技术,因其可以在大气较稀薄、光照充足的高空区域进行太阳能发电,所以相较其他发电方式,光伏无人机的发电效率更高[5]。传统无人机电源以镉镍电池、锌银电池为主,但受限于质量、体积、寿命等需求,其逐步被锂离子电池、燃料电池、锂硫电池、锂空电池、太阳能电池或蓄电池和太阳能混用所替代,受此限制,本文对光伏无人机智能充电站内无人机的锂电池充电控制进行具体的研究。
在电动无人机中,锂离子电池为电动无人机提供飞行动力,决定着电动无人机能否飞行和飞行时间的长短。对锂离子电池的特性、能量密度和锂离子电池系统结构优化设计进行研究,对电动无人机以及整个电动航空发展都非常重要,决定着电动无人机未来能否快速发展。例如,针对三元锂电池,可以采用恒流-恒压充电算法,控制充电电流和电压的大小,避免过充和过放现象[6-7],从而延长电池寿命。因此,本文选用了TB60无人机电池进行充电的仿真模拟,研究无人机锂电池充电控制系统的硬件和软件设计。
1 电池充电总体方案设计
充电站内会存在多个无人机锂电池需要同时进行充电的情况,为此本文设计了在多个电池中选择对电量最大的电池先行充电的充电策略。先为电量最大的电池充电可以提高无人机锂电池的充电效率,减小对无人机锂电池的损耗,缩短充电时间[8]。
1.1 充电电池选择逻辑
由于在整个充电过程中,涉及三个电池的充电过程。本文通过检测电路来判断锂电池和电源输入部分的电压,控制BUCK电路降压进行充电,充电过程中进一步判断锂电池工作状态。三个电池的充电策略流程图如图1所示。
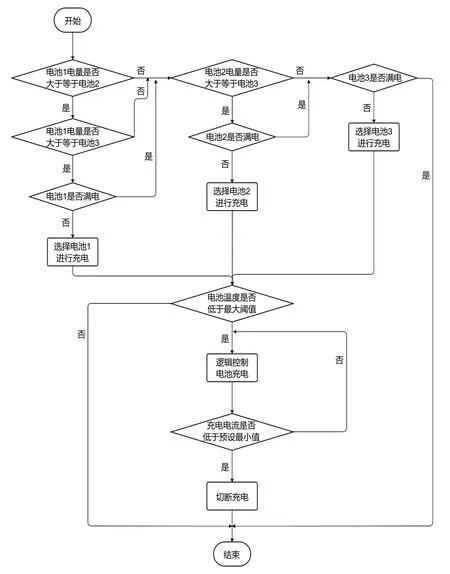
图1 电池充电控制流程图
由图1可以看出,该逻辑是将三块电池的电量依次比较,得出三块电池中电量最高的电池,然后判断该电池的温度是否符合充电要求的安全温度,如若符合,系统将自动对其进行充电。
1.2 单块电池充电策略
为了保证无人机锂电池在充电的过程中不受损坏,本文采用三段式充电法,三段式充电流程如图2所示。图2所示流程开始时先检测充电电池的端电压是否低于放电截止电压,如果低于截止电压,则进入涓流充电模式;若高于截止电压,则进入恒流充电模式。当电池电量达到95%时,系统自动进入恒压充电模式;当充电电流低于充电最低电流阈值时,系统自动切断电源,停止充电。
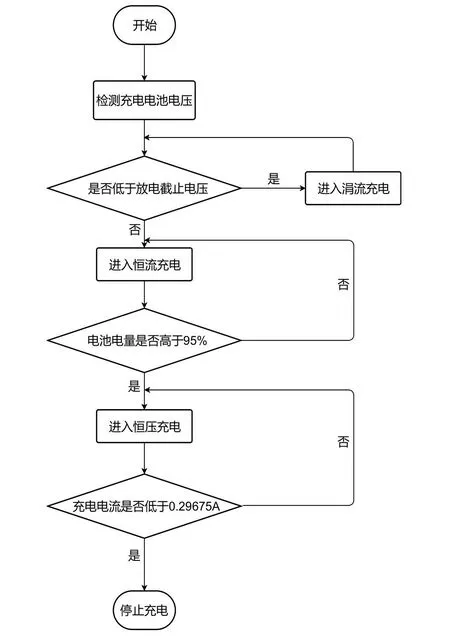
图2 三段式充电流程图
2 电池充电逻辑仿真
2.1 充电电池选择仿真
为了实现图1所示选择电池进行充电的功能,本文仿真设计了一种逻辑选择电路。仿真电路如图3所示。
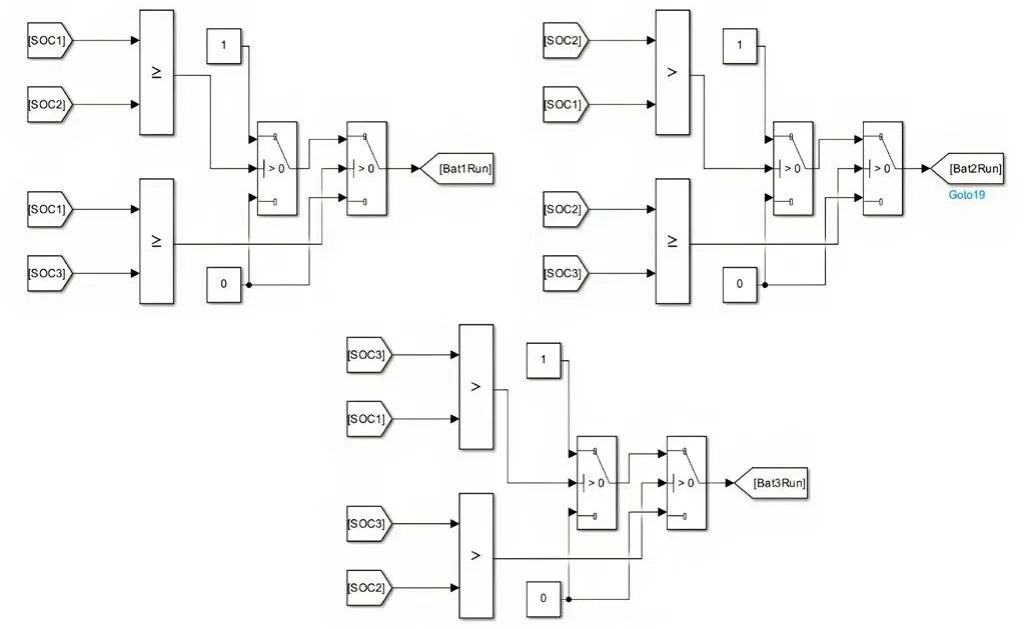
图3 电池选择仿真电路图
由图3可以看出,该逻辑是将一块电池的电量依次与另外两块电池的电量相比较,如若可以得出该电池电量最高,则判断停止;如若该电池电量非最高,则以同样的办法继续比较。若三块电池中有电量相同的情况,则以电池1优先级最高,电池2优先级其次,电池3优先级最低进行充电。判断出电量最高的电池后,系统将对该电池对应的充电晶体管发出触发脉冲,晶体管导通构成充电回路,达成充电的目的。
例如,将电池1的初始电量设置为50%,电池2的初始电量设为30%,电池3的初始电量设为10%,仿真时间设置为20 s。电池1的充电量增大,电池2和电池3的充电量基本保持不变。电量变化仿真图如图4所示。
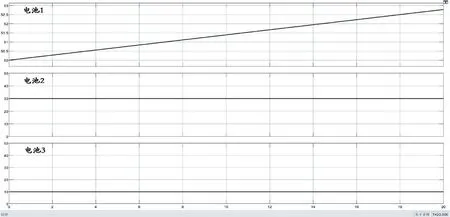
图4 电量变化仿真图
由三块电池电量的变化可以看出,只有电池1的电量发生了明显的变化,其余电池并没有进行充电,由此证明该仿真逻辑符合预期。
2.2 单电池充电逻辑仿真
由于本方案采用两块60 V蓄电池作为电源为无人机锂电池充电,为了使充电电压符合锂电池充电需要的电压,本次仿真采用一个BUCK降压电路对电源电压进行降压,并对锂电池两边的电压进行采样,采样结果对电路产生负反馈,实现充电控制。完整仿真逻辑如图5所示。
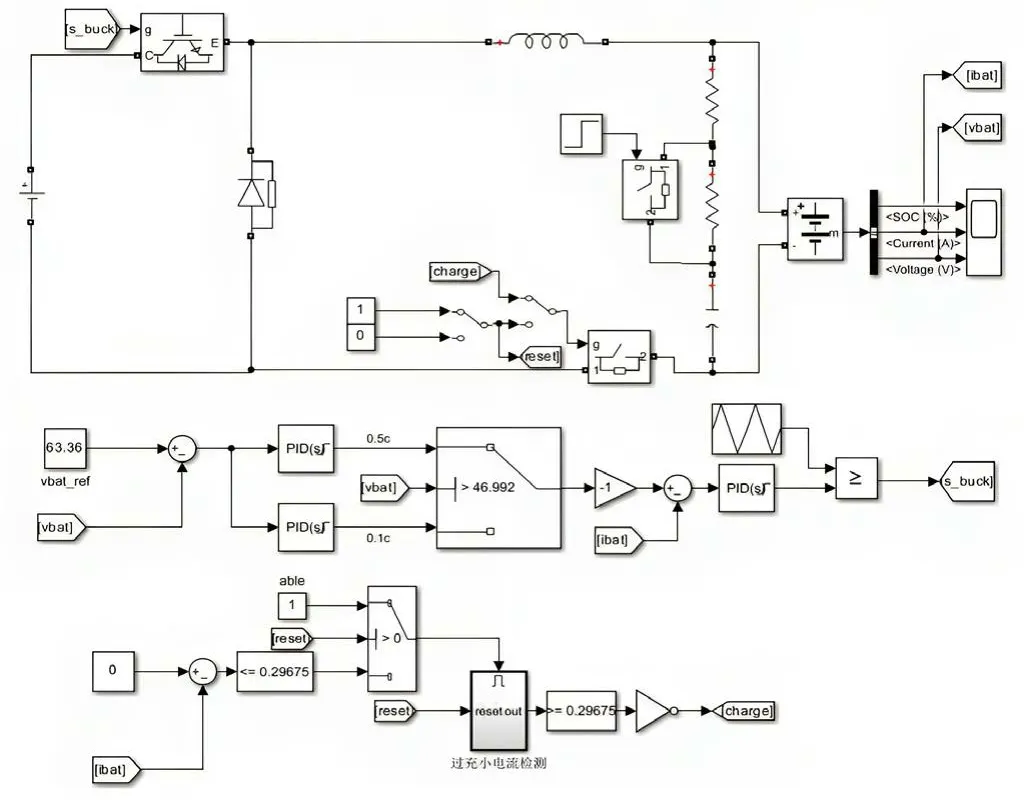
图5 单块电池仿真逻辑图
本次仿真将电池容量等比缩小10倍(0.593 5 Ah),这样既不会改变原有的充电曲线,同时也减少了仿真需要的时间。将电池初始电量(SOC)设置为0,就可以得到完整的充电波形[9]。
电压环PID控制器输出的是电流的给定值,为了实现三阶段充电,采用了两个PID控制器[10],利用电池端电压是否大于放电截止电压46.992 V(容量*0.89)来对两个不同线幅值的PID控制器进行切换,如图6所示。
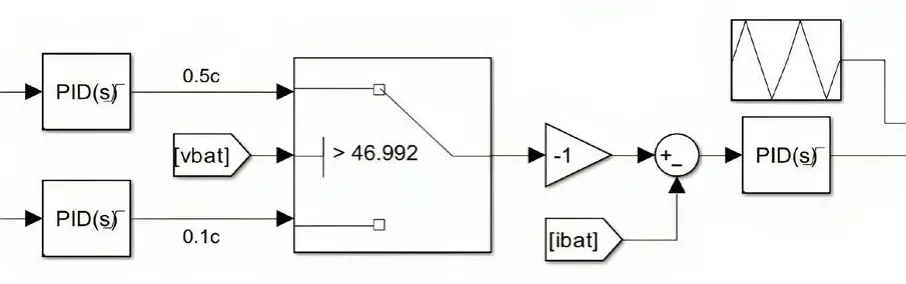
图6 充电模式控制电路图
由于初始电量设置为0,电池将直接进入涓流充电,涓流充电阶段电路仿真波形图如图7所示。由图7可以看出,电池刚进入充电时电量为0,系统将充电电流控制在0.296 75 A进行充电,而电池两端电压缓慢上升。
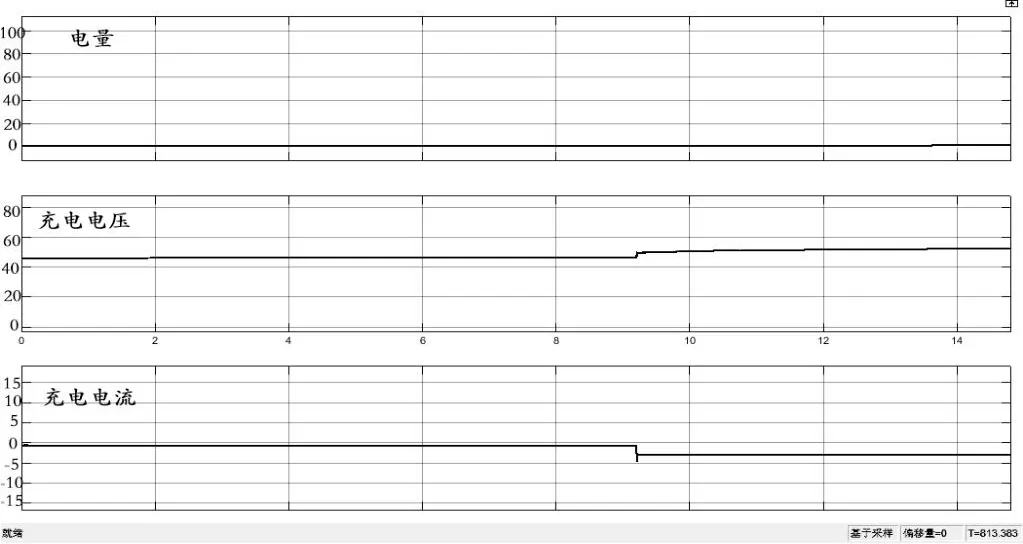
图7 涓流条件下电路仿真波形图
当电池两端电压大于放电截止电压时,将自动进入恒流充电模式。恒流充电阶段电路仿真波形图如图8所示。恒流阶段充电电流设置为2.967 5 A(容量*0.5)。该模式为整个充电过程中时间占比最长的阶段,在该阶段,电池两端的电压逐步升高,而充电电流保持不变。
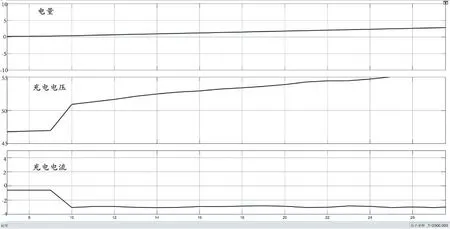
图8 恒流条件下电路仿真波形图
恒流充电一段时间后,电池电量达到95%,充电系统自动进入恒压充电模式。恒压充电阶段电路仿真波形图如图9所示。
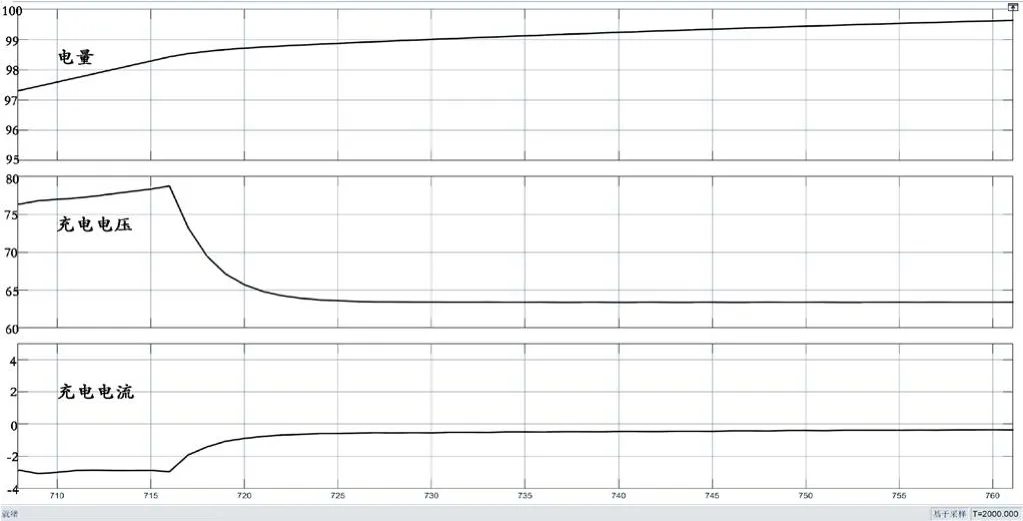
图9 恒压条件下电路仿真波形图
随着恒压充电的进行,电池两端电流逐步下降,降至预设值0.296 75 A时,系统自动停止对锂电池充电,避免电池过放过冲。自动断电仿真波形图如图10所示。
图10 自动断电仿真波形图
至此,单块电池经过涓流充电、恒流充电、恒压充电和自动断电后,电池电量达到99.8%左右,可以满足用户对电池电量的需求,整个充电逻辑结束。
3 总结
本文研究的充电仓多电池选择充电策略,通过检测电路来获取三块锂电池的电压并进行比较,控制触发脉冲导通电量最高的电池对应的充电回路通断晶体管,实现优先对高电量电池进行充电的目的。该设计满足了用户对于无人机电池快速充电的实际需求,实现了对硬件的高效利用。对单块锂电池进行恒流、恒压及涓流的三段式充电的设计,降低了充电对锂电池的损耗,大大延长了无人机锂电池的使用寿命。
猜你喜欢
中学生数理化·八年级物理人教版(2021年9期)2021-11-20
攀枝花学院学报(2021年5期)2021-10-19
大学物理(2021年2期)2021-01-25
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
电子制作(2018年19期)2018-11-14
电子制作(2018年17期)2018-09-28
电脑与电信(2018年12期)2018-03-23
大陆桥视野·下(2017年9期)2017-09-17
电子制作(2017年19期)2017-02-02
