七电平MPUC 逆变器滞环SVPWM 容错控制方法*
2023-11-02 08:17:08李国华
电气工程学报 2023年3期
李国华 韩 颖 李 丰 刘 明
(1.辽宁工程技术大学电气与控制工程学院 葫芦岛 125105;2.朝阳师范高等专科学校数学计算机系 朝阳 122000)
1 引言
电流跟踪型多电平逆变器在光伏并网、中高压电力系统有源滤波和无功补偿等场合广泛应用,具有容量大、电压谐波含量低和等效开关频率低等优点[1]。然而,由于多电平逆变电路中的电力电子器件相对较多,因此发生故障的概率也会大很多[2]。
多电平逆变器的容错控制方法可以分为硬件法和软件法两类。硬件法通常需要在多电平逆变器拓扑结构中增加备用单元或其他辅助模块[3-4],在此基础上实现容错控制。其中,基于N+1 冗余的级联型逆变器容错方法应用比较广泛。文献[3]在级联逆变器原有N单元串联的基础上,每相再增加一个或几个备用单元;通过备用单元投切实现容错控制。文献[4]在级联逆变器的负载侧增加了一个附加模块,灵活地进行结构重组,实现故障容错。由于设备绝大多数情况下正常工作,因此硬件法会造成备用单元的浪费,使主电路结构更加复杂。
软件法不需要改变多电平逆变器的拓扑结构,而是通过控制算法实现容错控制,能够节约硬件成本,简化系统结构。目前,基于软件法的容错控制策略研究主要包括以下三种。
一是屏蔽故障单元,并降容量运行。该类方法比较适合单相级联逆变器[5]。在三相多电平逆变器中,为保证三相输出相电压的对称性,除短接故障单元外,通常将另外两相中与故障单元相对应的非故障单元也屏蔽[6];但部分非故障单元未能充分利用,存在硬件资源的浪费[7]。文献[7]以七电平级联逆变器为例,证明该类容错方法中逆变器输出线电压幅值由故障前的 5.19Vdc,下降到故障后的3.46Vdc,其中Vdc为级联单元直流侧电压。
二是中性点偏移法,其实质是注入一个基本零序电压[8]。该方法可在仅旁路故障单元时获得最大的对称线电压;但中性点偏移法容易引起低次电压谐波升高。文献[8]提出一种差补调制方式,在实现容错运行的同时,还可以降低由中性点偏移引起的电压谐波。然而,当负载功率因数较低时,注入的零序电压可能导致实际功率回流,造成直流侧电压升高,甚至超出设定的范围[9]。
三是调整逆变器直流侧电压值。文献[10]通过升高故障相中级联单元的直流侧电压,使该相输出电压最大值与故障前相同;文献[11]将逆变器故障相直流侧电压升高至原来的2N/(2N-1)倍,并采用一个改进的选择性消谐方法,实现故障容错运行的同时,还能选择性消除低次电压谐波。但该类容错方法仅适用于直流电压可控的场合,而且会导致电力电子器件电压应力增大。为此,文献[12-13]提出中性点偏移和直流侧电压调整相结合的容错控制方法,可以减小故障状态下电力电子器件承受的电压应力。该类方法中,逆变器直流侧电压的升高会引起电压矢量的空间位置发生变化,使电压矢量的选取算法变得更加复杂。
改进U 型单元封装式(Modified packed U cells,MPUC)逆变器是由VAHEDI 等[14]提出的一种新型多电平双电源逆变器拓扑结构。MPUC 逆变器结合了电容飞跨型和级联H 桥型多电平逆变器的优点,在输出同样电平数情况下,所需的功率开关器件和电容器数量更少[15]。上述的软件容错控制方法主要针对级联多电平逆变器,均不适用于MPUC 逆变器。
本文提出一种电流跟踪型单相七电平MPUC逆变器滞环空间矢量脉宽调制(Space vector pulse width modulation,SVPWM)容错控制方法。当功率开关器件故障发生时,利用位置重叠或接近的冗余电压矢量代替故障电压矢量;优先选择位置重合的冗余电压矢量等效替代;如果没有重合矢量,则选择位置和作用效果最接近的其他矢量,从而实现容错控制。
2 拓扑结构和工作原理
图1 是由2 个独立的直流电源和6 组功率开关器件组成的七电平MPUC 逆变器;逆变器开关状态以及对应电压空间矢量关系如表1 所示;电压矢量空间位置如图2 所示。逆变器开关状态和电压空间矢量共有8 个;有3E、2E、E、0、-E、-2E、-3E等7 种电平。
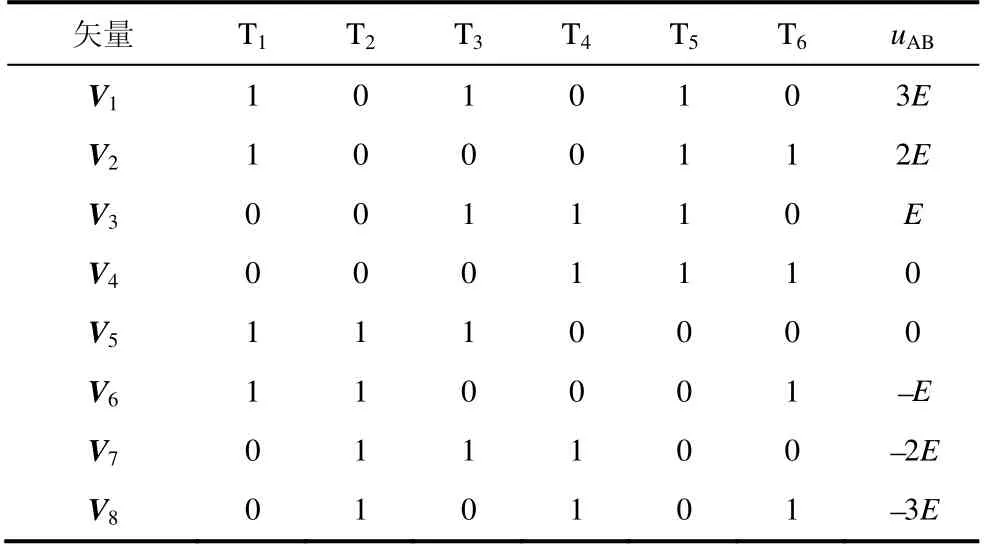
表1 MPUC 逆变器开关状态与电压矢量
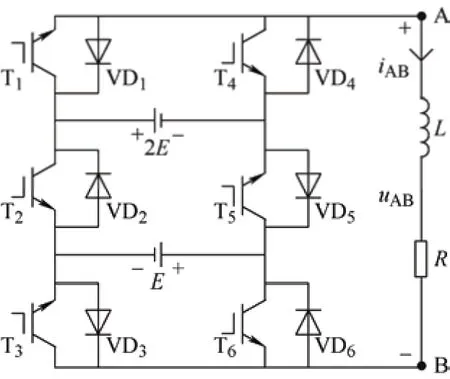
图1 MPUC 逆变器主电路拓扑图

图2 T1 和T4 开路对电压矢量的影响
如图3 所示,首先利用滞环确定电流跟踪误差Δi=i*-i,然后通过合理选取逆变器电压矢量将跟踪误差降低到滞环范围内。其中i*为参考电流,i为实际电流,滞环宽度为h、2h和3h。非故障状态下的电压矢量由式(1)选择;故障状态下,还需要将原算法选取的电压矢量进行替代,即进行故障容错控制。
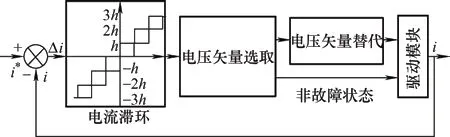
图3 MPUC 逆变器滞环电流跟踪控制方法流程图
3 MPUC 逆变器故障状态分析
当逆变器发生短路故障时,与开关器件串联的快速熔断器会保护性熔断,此时故障等效为开路故障,所以本文只研究开路故障。当MPUC 逆变器中的某一个IGBT 发生开路故障时,8 个电压矢量中将有4 个受到故障影响,成为故障矢量,如表2 所示。其中,“√”表示故障对该电压矢量无影响;“×”表示有影响,即该电压矢量变成故障矢量。例如,表2 中T1发生故障时,电压矢量V1、V2、V5和V6受到影响成为故障矢量,则表2中对应位置为“×”。

表2 开路故障对MPUC 逆变器电压矢量的影响
由表2 可知,当T1、T3、T4和T6中的某一个发生开路故障时,逆变器均可以输出至少一个正电压、零电压和负电压。即理论上仍可以控制负载电流升高和降低,只是可选择的电压矢量和电平数减少了。
当T2发生故障时,逆变器只能输出正电压和零电压;此时逆变器只能控制负载电流升高,不能控制其降低,即失去对电流的控制。虽然当负载电流为顺时针方向时,续流二极管VD2导通,此时逆变器有可能输出负电压;但由于二极管为不可控器件,该类状态无法受主控芯片准确控制,不属于有效电压矢量。同理可分析T5开路时的情况。
图2 和图4 给出了单管开路故障下逆变器电压矢量空间分布图。其中,虚线代表故障矢量,需要进行电压矢量替代;实线代表非故障矢量,不需要进行电压矢量替代。

图4 T3、T6、T2 和T5 开路故障的影响
4 电压矢量替代容错控制方法
如图2 和表2 所示,当非故障状态下选取的电压矢量为非故障矢量时,该电压矢量即为逆变器最终输出矢量;当选取的电压矢量为故障矢量时,则需要进行电压矢量替代。表3 给出了单管开路故障下MPUC 逆变器电压矢量替代方法。其中,“√”表示故障对该电压矢量无影响,不需要替代。

表3 开路故障下MPUC 逆变器电压矢量替代表
当T1、T3、T4和T6中的某一个发生开路故障时,均可以找出位置重合或方向相同的非故障矢量替代故障矢量。根据电流跟踪误差,控制逆变器实际输出电流的升降,从而实现容错控制。以T1发生开路故障为例,仅有V3、V4、V7和V8四个电压矢量不受该故障的影响,可以继续使用,无需替代;V1、V2、V5和V6受到该故障的影响,需要替代。其中V1和V2可用作用方向相同的矢量V3替代;V5可用位置重合的V4来代替,V6可用最相邻的矢量V7替代。即当Δi>3h和2h<Δi≤3h时,均选取矢量V3;当-2h<Δi≤-h时,选取矢量V7。
以T1发生单管故障容错时的电压矢量选取过程为例,经过表3 分析可知,替换后最终的输出电压矢量如式(2)所示。同理可得其他单管开路故障时的容错控制情况。
如图5 所示,当T2或T5发生开路故障时,首先将T2和T5驱动电压信号置于关断状态;并利用开关器件迅速短接C、F点,或短接D、E点;此时续流二极管VD2和VD5均承受反压而处于关断状态,理想状态下相当于断路;短接后逆变器的4个电压矢量如图5 所示。此时的容错控制方法见表3。其中,当短接C、F点时,零矢量选取(T1,T6);短接D、E点时,零矢量选取(T3,T4),以尽量减少两电源之间的相互作用。本文以短接C、F点为例。
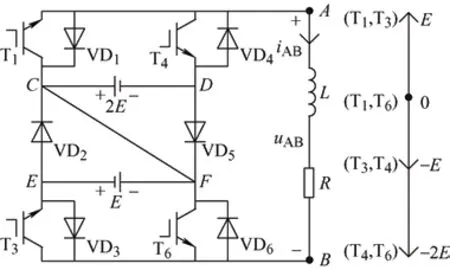
图5 T2 和T5 开路故障下的容错拓扑和矢量图
此时,MPUC 逆变器等效为降容量运行状态。由于IGBT 等功率开关器件在选型时,额定电压通常保留2~3 倍安全裕量;额定电流保留1.5~2 倍安全裕量。因此,降容量运行状态下,IGBT 承受的电压和电流不会超过其允许最大值。
5 仿真与分析
利用Matlab 软件进行仿真分析,系统参数设置如下:逆变器直流侧电源为100 V 和200 V;输出端电抗器为10 mH,电阻为20 Ω,环宽h为0.05 A。参考电流为幅值4.5 A、频率50 Hz 的正弦波。
图6 为非故障状态下,MPUC 逆变器输出电压和电流波形图,图7 为负载电流的THD 分析图。由图6 可见,当所有开关器件均正常时,逆变器输出电压和电流的波形均按正弦规律变化;此时的输电压为七电平,输出电流能准确跟踪参考值,电流谐波畸变率为3.10%。

图6 非故障状态下负载电压、电流波形图

图7 非故障状态下负载电流的THD
分别将逆变器中的T1~T6逐一断开,即每个IGBT 逐一发生开路故障。图8~15 为T1和T3发生故障时,负载电压、电流的故障波形图和容错波形图,以及负载电流THD 分析图。由于T1和T3发生单管开路故障时,对逆变器电压矢量的影响及其矢量替代方法,分别与T4和T6相反。因此,这里不再重复验证T4和T6发生开路故障的情况。
由图8 和图10 可见,当T1发生开路故障时,逆变器输出电平将缺少3E、2E和-E;而负半轴中的-2E和-3E不受影响。因此,输出电流波形明显出现了不规则变化,电流畸变率高达18.38%。图9和图11 为经过容错控制后的输出波形,此时的输出电流波形恢复正常,正弦度较好,容错运行状态下的电流谐波畸变率为3.38%,稍高于非故障状态。

图9 T1 容错时的负载电压、电流波形图
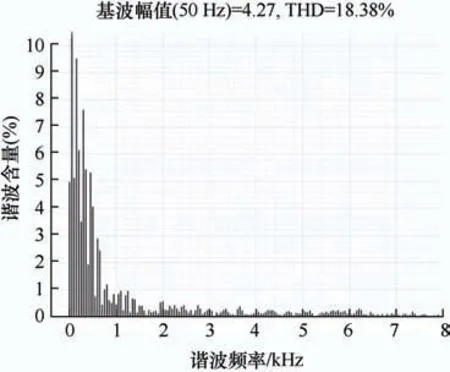
图10 T1 故障时负载电流的THD 图

图11 T1 容错时负载电流的THD 图
同理可得T3故障以及容错运行时的情况,如图12~15 所示。经过容错控制后的输出电流谐波畸变率为3.26%。
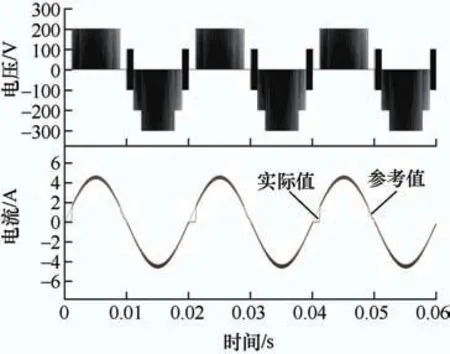
图12 T3 开路故障下的负载电压、电流波形图

图13 T3 容错时的负载电压、电流波形图

图14 T3 故障时负载电流的THD 图
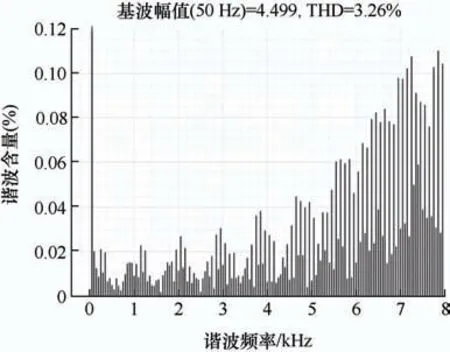
图15 T3 容错时负载电流的THD 图
图16~19 为T2发生开路故障情况时,通过短接C、F点,容错运行下的负载电压、电流的波形图以及负载电流的THD 图。

图16 T2 开路故障下的负载电压、电流波形图
由图16 和图18 可见,当T2发生开路故障时,逆变器输出电平将缺少负电平。因此,输出电流波形明显出现了不规则变化,此时电流畸变率高达43.68%。图17 和图19 为T2经过容错控制后的输出波形,输出电流波形恢复正常,正弦度较好,容错运行状态下的电流谐波畸变率为3.22%,稍高于非故障状态。

图17 T2 容错时负载电压、电流波形图
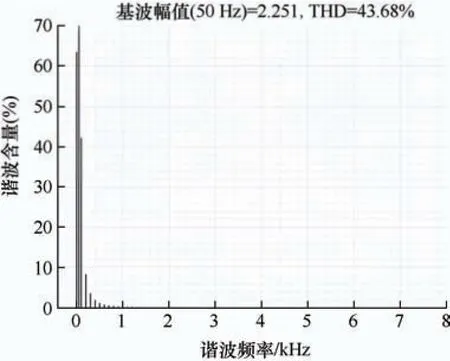
图18 T2 故障时的负载电流THD 图
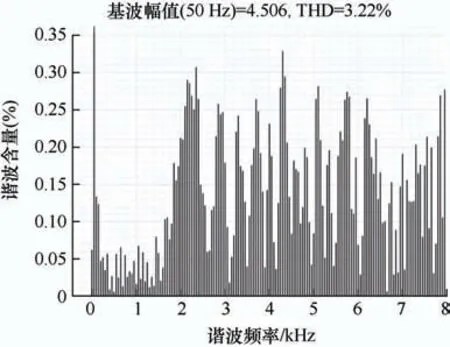
图19 T2 容错时的负载电流THD 图
由于T2发生单管开路故障时,对逆变器电压矢量的影响,以及矢量替代方法与T5恰好相反。这里不再重复验证T5发生单管开路故障的情况。
通过上述分析可知,故障状态下利用基于电压矢量替代的容错控制方法,可以保证MPUC 逆变器较准确地跟踪参考电流,谐波含量稍有提高。这是因为电压矢量替代的过程中,逆变器输出电压误差导致电流跟踪误差升高。
6 结论
(1) 本文提出一种电流跟踪型单相七电平MPUC 逆变器滞环SVPWM 容错控制方法。首先分析了逆变器各功率开关器件开路故障对电压矢量的影响;优先选择位置重合的非故障矢量进行等效替代;如果没有位置重合的非故障矢量,则选择作用方向相同的非故障矢量。
(2) 仿真结果证明该方法可以在MPUC 逆变器单管开路故障情况下,保证逆变器继续稳定工作,能够较准确地跟踪参考电流值。
(3) 该方法算法简单,易于实现;不需要增加备用的硬件冗余硬件资源,能够节约硬件成本,简化系统结构,提高MPUC 逆变器的工作可靠性。
猜你喜欢
中学生数理化·八年级物理人教版(2021年9期)2021-11-20 06:00:28
攀枝花学院学报(2021年5期)2021-10-19 02:52:58
建材发展导向(2021年7期)2021-07-16 07:07:28
大学物理(2021年2期)2021-01-25 03:26:18
青年歌声(2019年2期)2019-02-21 01:17:36
知识经济·中国直销(2017年11期)2017-11-28 05:34:13
中国公路(2017年16期)2017-10-14 01:04:46
大陆桥视野·下(2017年9期)2017-09-17 15:11:21
电测与仪表(2016年22期)2016-04-12 00:19:58
电子工业专用设备(2015年4期)2015-05-26 09:10:33