磁致伸缩式柔性微夹钳的设计及实验
2023-11-01 02:23:08祝志芳刘良涛刘源杰余宏涛卢全国
机械设计与研究 2023年5期
祝志芳, 刘良涛, 刘源杰, 余宏涛, 卢全国*,
(1.南昌工程学院 江西省精密驱动与控制重点实验室,南昌 330099,E-mail:luqg2010@126.com;2.浙江理工大学 机械工程学院,杭州 310018)
随着微机电系统(Micro-Electro Mechanical System,MEMS)愈加集成化、复杂化、微小化,微装配技术[1-2]在多领域得到了高度重视。微夹钳是微装配系统的末端执行器,直接与微小零件相接触,所以微夹钳的设计对于微装配显得尤为重要。
国内外相关学者研究的微夹钳种类多样,按驱动方式可分为压电驱动、热驱动、静电驱动、电磁驱动、形状记忆合金驱动、真空吸附驱动等。陈方新等人[3]设计了一种压电驱动微夹钳,Luo等人[4]设计了一种电热驱动多指微夹钳,德国R.Wierzbicki等人设计了一种静电驱动微夹钳[5],Kim等人[6]研发一种电磁驱动微夹钳,清华大学研发了一种形状记忆合金(SMA)驱动微夹钳[7],华中科技大学研发一种真空吸附式微夹持器[8]。
本文基于磁致伸缩效应,设计了一种以Galfenol材料为驱动元件的复合悬臂梁结构微夹钳,装置结构简单、夹持范围大、可实现对目标物的柔性微夹持过程。通过理论分析和实验的方法,研究了微夹钳在不同大小电流驱动下的整体输出性能,为磁致伸缩微夹持器的设计与应用提供参考。
1 微夹钳的设计
1.1 设计原理
复合悬臂梁是精密位移驱动和控制中的一类基础结构,利用复合悬臂梁结构可以实现微小位移与力的传递,它的工作原理是通过悬臂梁的主动弯曲形变,实现位移和力的传递[9]。悬臂梁弯曲过程中智能材料需要承受较大的张力[10],本文所采用的Galfenol合金是一类具有磁致伸缩效应的智能材料[11],具有优良的机械加工性能和力学性能,将Galfenol薄片直接粘贴于铍青铜夹片表面,在增大夹持范围的同时可实现对被夹持物的柔性夹持过程,不易破坏被夹持对象。本文设计的微夹钳的整体结构为悬臂梁结构,主要由底座、激励线圈、线圈骨架、Galfenol薄片及铍青铜夹片等部分组成,如图1所示为微夹钳的整体结构,图2所示为复合悬臂梁结构,其中Galfenol的厚度为tG、高度为L2、上底宽b、下底宽a,铍青铜夹片的厚度为tS、高度为L1、上底宽d、下底宽c。

图1 微夹钳整体结构

图2 复合悬臂梁结构
微夹钳的工作原理为激励线圈中通入驱动电流后,线圈会产生激励磁场,磁致伸缩材料Galfenol在磁场作用下会发生磁致伸缩效应,产生伸缩变形,以该形变来控制微夹钳夹口的输出位移,从而实现对被夹持物的夹持过程。如图3所示,夹片固定在底座上,夹取范围与夹片偏转位移量的关系可简化为:

图3 微夹钳工作原理
W=W0-W′=W0-2Δ
(1)
式中:W为微夹钳的夹持范围;W0为微夹钳设计时两夹片的距离;W′为两夹片的总偏转位移量;Δ为单夹片的偏转位移量。
通过对复合悬臂梁的密度函数求解体积积分的方式获得其内能方程,利用悬臂梁的中性面法向应力平衡方程求出中性面的对应位置,再进一步求出复合悬臂梁的曲率方程,根据曲率方程则可求出复合悬臂梁的偏转位移大小,为方便计算,将整个复合悬臂梁简化成关于中性面对称形式,如图4所示为复合悬臂梁的简化模型,x和y分别是指复合悬臂梁的平面横向位移和平面纵向位移,ρG、EG及cG分别是Galfenol材料的密度、杨氏模量和阻尼系数,同时ρS、ES及cS分别是复合悬臂梁中基底材料的密度、杨氏模量和阻尼系数,b为复合悬臂梁的宽度,λ为磁致伸缩系数,h为复合悬臂梁中性面的位置,设自由端为L。
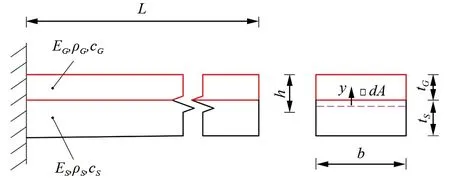
图4 复合悬臂梁及截面几何尺寸
复合悬臂梁的总内能可以通过对Galfenol和铍青铜的密度函数求解体积积分的方式得到[12],即:
(2)
(3)
从式(2)可以看出悬臂梁内能大小与中性面位置h密切相关,而h可由中性面法向应力平衡方程(3)求出,即:
(4)
将式(4)代入式(2)中,可以把复合悬臂梁的内能方程转化成自变量为曲率k的函数,基于内能恒定不变,将内能方程对k求导并使其一阶导数等于零,可以求出曲率k,即:
(5)

设基底的长度为L1,Galfenol薄片的长度为L2,复合悬臂梁单夹片的输出位移则可由公式(6)求解:
(6)
因为EG、ES是常量,所以由输出位移方程可知夹片偏转位移与tG、tS、L1、L2有关。
1.2 驱动元件的设计
本文设计的磁致伸缩式柔性微夹钳是基于磁致伸缩效应,磁致伸缩效应是材料内部的磁畴随磁场变化会发生磁畴转动与畴壁移动的现象,从而引起材料产生伸缩变形[13],可应用于微电机、微驱动器[14-15]等装置的设计中。
相较于其他智能材料的整体性能而言,Galfenol合金具有优越的机械加工性能、力学性能和抗疲劳强度大等优势,根据设计需求,将Galfenol设计成上窄下宽的薄片状,其尺寸参数设计可参考以下公式[16]:
(7)
式中:ki为结构设计的系数;Δlm为磁致伸缩片的最大伸长量;λm为材料在设计合理范围内的最大磁致伸缩率;Ec为材料的杨氏模量;Sa为片状材料在长度方向上的截面积;fmax为材料在设计范围内的最大应力。
可计算出Galfenol薄片的厚度tG为0.8 mm、高度L2为68 mm、上底宽b为3.4 mm、下底宽a为5.8 mm。由于铍青铜具有良好的耐疲劳性、耐腐蚀性、不导磁等性能,选铍青铜作为执行元件,根据设计需求得出铍青铜夹片的厚度tS为1 mm、高度L1为80 mm、上底宽d为2 mm、下底宽c为6 mm。
1.3 激励线圈的设计
Galfenol薄片需要在磁场作用下才能够产生磁致伸缩效应,本文采用空心螺线管结构的激励线圈来提供磁场,其结构设计的主要参数包括内径r1、外径r2、长度l,如图5所示为激励线圈结构示意图。

图5 激励线圈结构示意图
由安培环路定理可知,激励线圈的驱动磁场计算公式为[17]:
NiIm=kiHln
(8)
式中:ki为在漏磁状态下,激励线圈的补偿系数,其值设为1.11[18];H为作用在驱动元件Galfenol片上的磁场强度;Im为通入线圈的驱动电流;Ni为激励线圈缠绕的匝数;ln为整个激励线圈的长度。
为了实现更好的输出特性,根据Galfenol的λ-H曲线及Galfenol片的设计尺寸参数,综合两者考虑,确定Galfenol的最大激励磁场为10 kA/m。根据设计要求确定激励线圈的高度l为65 mm,通过上述公式可知激励线圈的匝数N约为450匝。
综上,复合悬臂梁和激励线圈的尺寸参数如表1所示。

表1 相关设计尺寸参数/mm
2 实验系统搭建
2.1 样机制作
为了进一步研究微夹钳的性能,加工制作了实物样机,如图6所示为装置样机。

图6 装置样机
2.2 实验测试平台搭建
利用LTS-025-02激光位移传感器和位移数据采集软件对微夹钳的输出位移进行测量,并利用不同大小的电流信号驱动激励线圈产生磁场,从而控制微夹钳夹口的输出位移。为了便于对实验结果进行分析,选取线圈引出线左侧的夹片为A端,线圈引出线右侧的夹片为B端,实验测试平台如图7所示。

图7 实验测试平台
3 实验结果分析
通过实验测试得出微夹钳A、B端的位移随电流变化曲线如图8所示,其中微夹钳A端的最大偏转位移量达到106.4 μm,B端的最大位移量为124.8 μm,微夹钳的整体输出位移可达231.2 μm,夹持范围大,操作方便,具有广阔的应用前景。

图8 微夹钳A、B端位移随电流变化曲线
从图8中可知,两个夹片的偏转位移不对称,这是由于复合悬臂梁内部的粘贴误差和磁场线在Galfenol薄片的分布情况有差异导致,验证了微夹钳结构设计原理的可行性。
4 微夹钳的应用
现有的微装配方式主要有3种:手工微装配、人机协同微装配以及全自动智能微装配[19]。企业中主流的微装配方式是半自动化的人机协同微装配,即操作者借助高精度的执行机构以及计算机视觉反馈、力反馈控制等检测手段,完成高精度的微装配任务。通过搭建微装配系统平台,模拟生产过程中对微小零件的夹取和装配过程。如图9所示为微夹钳应用流程图。

图9 微夹钳应用
该微夹钳还可应用于微零件的精密加工和装配、微型仪器仪表装配、传感器的装配、钻石分拣和安装、钟表的制造和装配,并且有望在芯片制造、微细胞操作上得到应用[20]。
5 结论
本文介绍了一种基于磁伸缩材料Galfenol的复合悬臂梁式柔性微夹钳的设计,文章讨论了微夹钳的结构设计及其相关尺寸,为了探究微夹钳的位移输出特性,搭建实验测试平台对其进行实验分析,通过实验测试可知,在改变输入电流的情况下可实现对微夹钳夹口输出位移变化的精确调节,并探讨了将该微夹钳应用于微装配系统的前景,可望进一步拓宽微夹钳的应用领域。
猜你喜欢
锻造与冲压(2024年5期)2024-03-27 08:01:08
锻压装备与制造技术(2022年1期)2022-03-24 13:22:58
天津建设科技(2021年4期)2021-09-13 01:37:38
科普童话·学霸日记(2021年4期)2021-09-05 03:59:00
装备制造技术(2020年2期)2020-12-14 03:09:36
建材发展导向(2019年10期)2019-08-24 06:25:50
制造技术与机床(2018年11期)2018-11-23 01:08:04
现代制造技术与装备(2018年6期)2018-07-27 08:37:50
学生天地(2017年30期)2018-01-05 01:52:12
学生天地·小学低年级版(2017年10期)2017-12-11 18:28:16