
基于机器学习的遥感图像识别检测技术研究
2023-10-31 07:06李杰
信息记录材料 2023年9期
李 杰
(银川能源学院 宁夏 银川 750100)
0 引言
在对图像识别的过程中,传统的单一方法已经无法实现高准确率、高分辨率和高光谱的需求,因此要改进传统机器分类方法。遥感图像识别检测技术能够通过单波段得出高光谱图像,分辨率在不断地提高。目前,遥感图像的分类是各个领域的研究重点,如何集中技术的优势,是今后研究过程中的重点[1]。
1 传统机器学习方法
目前机器学习分类的方法比较多,包括最大似然法、基于统计模式识别方法、通用线性回归等,研究人员复合使用对象信息、空间信息和光谱信息具有一定的效果。
1.1 基于统计的方法
基于回归的机器学习方法原始输入数据为X,输出数据为Y:
g(x)=ρ0+ρ1X1+ρ2X2=ρTX
(1)
式(1)中,ρ0指的是截距,一般使用最小方差法创建回归模型,g(x)代价函数表示为式(2):

(2)
通过Widrow-Hoff所提出的最小均方差算法,利用不断尝试全新ρ使代价函数为式(3):

(3)
通过式(3)推导出式(4):

(4)
将式(4)代入式(3)得式(5):
ρj:ρj+β(y(i)-gρ(x(i)))xj(i)
(5)
此算法使用梯度下降的方法能够满足代价函数最小值,并且发展批量梯度下降方法,从而促进了收敛速度。分类中最大似然法为传统算法,假设随机量满足高斯分布,那么相似最大似然模型定义为:

(6)
此Softmax算法,可理解为Logistic算法的一般化。上述方法总体为基于统计对各个像元各波段光谱和空间信息特征进行处理,之后以特征实现分类识别的方法[2]。
2 改进算法的设计
2.1 直方图均衡化
通过灰度直方图对图像频率与灰度进行全面分析,绘制灰度分布统计图,能够直观地反映出灰度分布情况。具体过程为:以目标像素为中心,设置M×N邻域范围,实现范围中全部像素值设置为统计排列,中间位置值为目标像素灰度值。为了改善效果,在一个像素点处理过程中调整窗口大小。全面判断当前区域中的值是否为噪声点:假如是,就要扩大窗口尺寸,寻找合适中值;假如不是,就要全面判断中心像素点的噪点[4]。
图像识别重点就是提取特征,为了全面了解图像特征,要使人类视觉图像抽象描述成为向量、数值等。特征能够通过统计图像局部区域的方向梯度直方图(histogram of oriented gradient, HOG)得出,详细描述图像中的目标形状与表象,算法的流程详见图1。
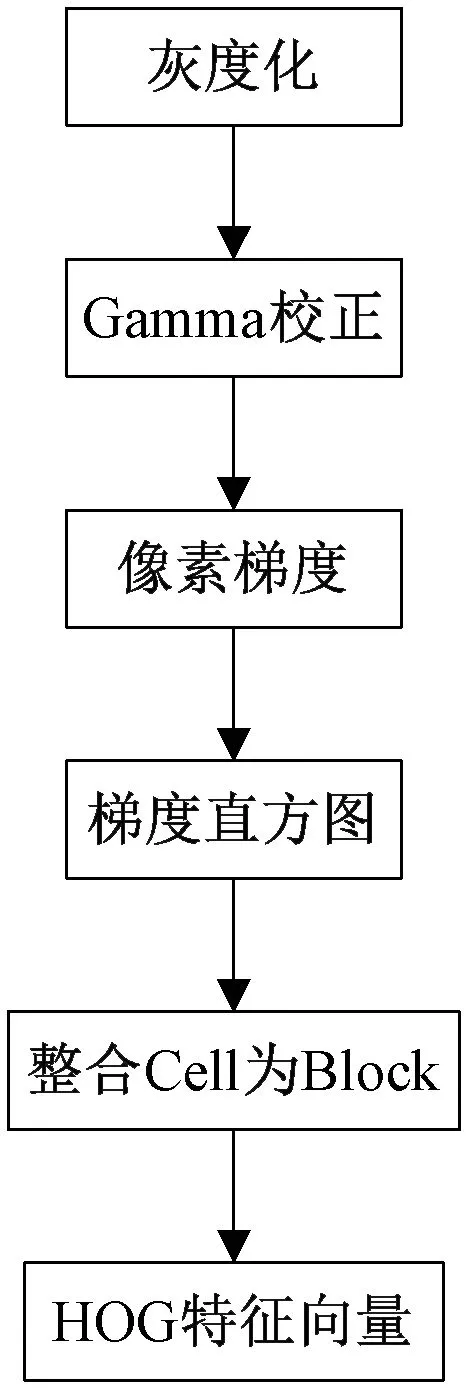
图1 算法流程示意图
Gamma校正能够压缩图像,光照会影响到图像纹理,通过校正降低图像阴影。以图像的不同改变校正幅度,对图像显示效果进行调整[5]。
在对图像纵横坐标计算的过程中,可以使用[-1,0,1]算子与[-1,0,1]转置算子实现图像卷积运算,全面计算梯度方向和幅值。将图像实现多个单元格Cell的划分,统计梯度方向的分布情况。在检测道路的过程中,角度范围设置为180°。由于局部对比度和光照的变化,会改变梯度强度的变化,从而解决梯度强度归一化的问题。利用多个单元格实现连通Block空间的创建,根据Block形状区分环形和矩形的区间。最后,利用重叠后Block块实现特征向量的创建,对比其他特征的提取方法,HOG特征提取能够局部处理图像,并且不会使图像光学形态改变。本文将图像拆解为大量的小Cell,使HOG化得到实现,对Cell大小调整,从而实现区域特征信息精度的控制[6]。
2.2 分类器设计
反向传播算法(back propagation, BP)通过误差反馈创建神经网络。能够逐层和网络中神经元进行连接,通过误差反馈层实现。BP神经网络还能够满足输出结果的需求,假如数据不满足,就要返回到中心处理。利用BP神经网络训练样本,并且对样本进行识别和反馈。基本原理是通过传输层、隐藏层传输信息,并且对传输的信息进行对比,如果计算结果无法使预期需求得到满足,就要对系统参数重新计算。调整信息的阈值和权值,以此实现循环计算,直到结果能够满足需求,在目标层中存储[7]。
通过量化共轭梯度的方法进行分类,传统的梯度下降法收敛负梯度,本文所设计的共轭梯度算法能够使负梯度的方向和上次搜索结果结合,计算全新的方向。因为共轭梯度在算法过程中对方向重新计算,所以计算时间得到增加。量化共轭梯度法能够避免单一的线性搜索,使网络训练速度得到提高。
通过损失模型能够判断模型预测的好坏,充分反映出模型与实际的差距,交叉熵损失函数、损失函数等为常见的损失模型。在二分类问题中,为了衡量神经网络输出向量,利用交叉熵进行评价,当熵值较小时,两个概率分布就会比较接近。交叉熵设定两个概率分布p和q,p指的是理想结果,q指的是神经网络输出结果,两者满足p+q=1的关系,交叉熵计算公式为:
M(p,q)=-∑xp(x)logq(x)
(7)
熵值越小,两个概率分布就会越近。
2.3 结果优化
图像处理方法被广泛应用到道路网提取中,膨胀腐蚀属于形态学变换,复式操作能够降低物体边界比较小的部分,使物体得到扩大,连接原本已经断开的物体。开闭运算能够组合腐蚀和膨胀,在开运算过程中能够先腐蚀然后膨胀,闭运算能够先膨胀之后进行腐蚀,利用同种结构元素进行计算。在开运算过程中,能使图像的边缘更加光滑,使细小连接断开,消除边缘细小的毛刺[8]。
3 实验讨论
3.1 实验数据
为了对本文方法优越性进行验证,通过景视图得到高分辨彩色遥感影像数据,使用全自动方法作为对比算法,对比视觉与统计分析。
3.2 道路标记
在同个场景中包括不同类型道路,纹理与颜色不同,对完整提取道路是不利的。因此,不同类型道路通过绘制矩形框的方法标记。
3.3 本文实验结果
因为道路光谱特征的相似性,从而使粗提取操作存储在零星伪道路中,利用道路区域的大范围联通点对结果进行提取,之后进行精细化处理。为了评价本文的方法,要求在原始图像中实现提取的道路结果叠加。通过叠加方式表示,本文方法提取结果为全部类型道路,提取结果能够使实际道路边界需求得到满足,表示本文方法的便捷定位与道路类型提取具有密切关系。表1为各个缓冲区半径中的提取精度,说明手工边界线与本文方法边界线最高的精度为2 pixel时,本文方法的准确性比较高[9]。
3.4 对比算法道路提取结果
图2为本文方法提取结果,使粗提取结果存储到零星伪道路中,通过道路区域大范围的连通特点和形态特征实现结果精细化处理。
从图2可以看出,本文方法结果能够对所有道路进行提取,而且实际道路和提取结果的道路边界是相互吻合的,说明本文的方法在提取道路方面具有良好的准确性和完整性。针对本文方法的定量化评价,利用Modava的基于邻域像素评价标准,实现手工提取道路边界的评价,从而创建缓冲区,对不同半径缓冲区累加百分比进行计算。使提取的结果在原始图像中叠加,通过对比,本文方法所提取的边界线与实际边界线吻合性良好,验证了本文方法的有效性与可行性。另外,针对邻域像素评价标准对比算法开展定量评价,详见表2。对比表1和表2,在完全重叠情况下,刘修宇方法[2]与何晓军方法[4]和本文的方法没有太大的平均提取精度差异。在半径为2 pixel的时候,本文设计方法的半径提取精度已经超过80%,说明本文方法对图像的检测准确度比较高。

表2 算法在不同缓冲区的半径提取精度
4 结语
针对无法提取高分辨率遥感图像道路的问题,本文使用多标记像素匹配为基础的技术,标记多类型道路提取正确匹配模板,使道路区域提取效果的需求得到满足。通过局部纹理特征实现匹配像素的筛选,使计算复杂度降低,利用道路区域形态特征划分真实道路区域,对高分辨率遥感图像道路的结果进行提取。通过试验测试,证明了本文方法的检测精度高,优越性显著。
猜你喜欢
艺术家(2023年8期)2023-11-02
小哥白尼(军事科学)(2022年2期)2022-05-25
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
数学物理学报(2021年6期)2021-12-21
青年歌声(2020年12期)2020-12-23
应用数学(2020年2期)2020-06-24
红领巾·萌芽(2019年8期)2019-08-27
数学年刊A辑(中文版)(2018年2期)2019-01-08
CHIP新电脑(2016年3期)2016-03-10
