风电场大容量风电机组永磁直驱发电机稳态运行参数动态优化
2023-10-30 00:57:00程云强边晋发陈晓星高永军马俊仁
水力发电 2023年10期
程云强,边晋发,陈晓星,高永军,曹 锋,马俊仁
(山西大唐岚县清洁能源有限公司,山西 太原 030006)
0 引 言
风力发电是一种可持续的无污染能源,它不仅可以缓解全球能源危机,还可以实现低碳环保,在新能源的开发和应用以及能源结构的转变和转变中起着关键作用,是全球发展速度最快的一种重要能源方式。在我国陆上风电产业中,大容量风电机组永磁直驱发电机已被广泛使用。由于永磁直驱发电机在并网过程中的动态随机性,使风电机组的电力输出不断变化,严重影响了发电机稳态运行。为了提高电能质量,提高发电效率,有效地保证风力发电机稳态运行已然成为研究的重点。文献[1]设计一种灰色PID控制器,通过计算风电机灰色预测值,将基准值与参考值误差带入PI控制器,采用调节脉冲信号实现风力发电机运行参数优化。然而该方法容易受到外部环境因素随机性的影响,无法对参数数据实时跟踪监测,导致输出电压幅值波动较大,实际优化效果没有达到明显提升。文献[2]提出非奇异端滑模控制优化方法,通过设计变结构滑模面求取滑模控制率参数,针对发电机抖振扰动特性进行实时预估和数值补偿,使风电机组运行更具稳定性。然而这种方法存在较高的复杂性,收敛时间耗时较长,在实际应用中较少使用。为此,本文提出一种风电场大容量风电机组永磁直驱发电机稳态运行参数动态优化方法,提高关键参数收敛精度,从而达到风电机组最优运行状态。
1 大容量风电机组永磁直驱发电机结构与动态参数抓取
随着电力需求的增长和电力系统规模的扩大,我国风力发电设备逐渐趋于大型化发展[3],市场对大容量风电机组永磁直驱发电机(Permanent magnet direct drive generator,PMDDG)的需求与日俱增,提高风电机组容量和发电效率等方面的市场需求[4],将继续推动我国风电机组朝着大功率发电方向发展。
由于风电机组日渐大容量化,传统发电机中的齿轮箱在工作过程中极易产生过载和磨损现象[5],导致风电机组发生故障,影响系统的稳态运行。PMDDG采用慢速永磁发电,免去齿轮箱等构件,通过发电机与风轮耦合直接驱动,使发电机组的运行和维护更加简化[6],提高了系统的稳态性能。
1.1 风能永磁发电机机组结构
PMDDG机组系统由风轮机、滤波器、断路器、换流器、电流控制器、永磁直驱发电控制系统等部件构成,机组结构如图1所示。
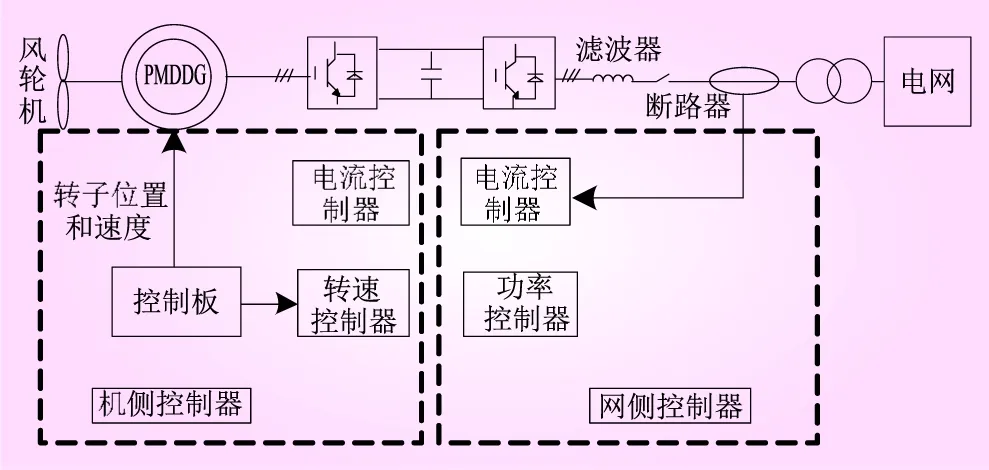
图1 PMDDG机组结构示意
1.2 风能永磁发电机关键参数抓取
由于系统受到外部环境因素影响[7],导致电力输出波动性较大,为了保持系统的稳态运行,需要对关键参数进行抓取[8],并利用这些参数对风电机组运行状态进行实时跟踪分析。
构建PMDDG机组电压模型为
(1)
式中,ud、uq分别为轴向电压;id、iq分别为轴向电流;Rs为定子电阻;ψd、ψq分别为轴向磁链。
将式(1)进行离散化,得到动态参数抓取模型
Te=(3/2)P[ψg+(Ld-Lp)idip]
(2)
式中,Te为定子转矩;ψg为永磁电磁链;Ld、Lq分别为轴向电感。
PMDDG关键参数的选择要综合考量直流外环的动态响应与稳态性能[9],影响其主要因素是电压环带宽频率值,因此本文分别对电磁转矩与电压环带宽进行控制分析,判断这两个因素对稳态耦合特性的影响。
2 大容量PMDDG机组关键参数优化
2.1 基于PID控制的风能永磁发电机转矩参数动态优化
PID控制器是一种传统的控制方式[10],它能通过对被控对象的误差特征进行比例、积分、微分等运算,从而获得控制参量[11],减小稳态偏差,使一个转矩控制周期内实际观测的电磁转矩达到理想值。PID控制架构如图2所示。
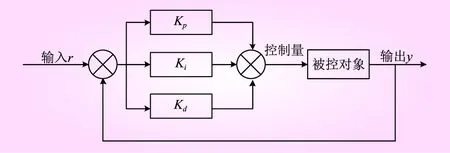
图2 PID控制架构示意
将实际转矩与基准转矩的之差输入PID控制器得到输出转矩[12],将输出转矩与转矩测量值的偏差数值输入控制系统,计算出满足消除转矩波动的基准电压,经逆变器调节驱动电机运行。
将电流量消除,简化后得出电磁链离散化公式
(3)
式中,ψd(t)、ψq(t)分别表示当下时间轴向磁链;ψd(t+1)、ψq(t+1)分别表示未来时间轴向磁链;ud(t)、uq(t)分别表示当下时间轴向电压;ψg(t)表示当下时间永磁体磁链;Kr表示整个控制周期。
对转矩进行推算且使其离散化
式中,Te(t+1)为当下时间的电磁转矩;Te(t)为未来时间的电磁转矩。
将式(5)化简得出q轴当下时间定子参考电压为
(6)
为使整个控制时间范围内转矩误差得到满意控制效果,对未来时间磁链波动值进行推导
ψg(t+1)2=ψd(t+1)2+ψq(t+1)2
(7)
得到d轴当下时间定子参考电压为
基于PID控制方法减少了参数计算数量[13],使整个控制过程更加便捷,直接求出坐标轴向参考电压,减小PMDDG在控制时间范围内的转矩偏差,降低了PMDDG运行时的转矩波动,提高系统动态响应能力。
通过PID控制可以有效实现PMDDG转矩参数动态优化,但关键参数中还包含电压带宽稳态参数,因此需要引用目标函数进行进一步优化。
2.2 电压带宽稳态参数优化控制函数
电力系统中,用来体现优化目的性能指标被称作目标函数。为了使PMDDG稳定运行,以电压稳态输出为参数优化的目的,设立目标函数为电压幅值,影响电压幅值稳态的目标函数变量为电压带宽动态参数。传统的电压幅值控制稳压策略[14],以在磁场定向控制为基础,引入电压值反馈,直流机侧电压额定数值与反馈数值的偏差值作为电压外环控制器的调节参数,输出为电流环的电机电流驱动信号[15]。此外,将电压环解耦后等值为一阶惯性环节,与传统电压环中以电压命令和电压取样反馈信号的偏差数据作为控制器输入的方法相比,此处利用电压平方项的偏差数据作为调节参数,省去了控制环内的非线性环节,是电压环带宽参数整定的基础。
假设控制效率为kn,可得到发电系统额定电压控制的开环目标函数为
uo=knki[(s+ki)/s][ωb/(s+ωb)]
(9)
式中,ki为积分因数;ωb为电压环带宽;s为PMDDG运行时的平均功率。
可得到发电系统额定电压控制的闭环目标函数为
uc=uo/[n+uo(s)]=(2knkikp/c)(s/ki+n)/
[s/ωb+s2+2knkp/c]s+2knkikp/c
(10)
式中,kp为比例因数,在电压幅值调节时的截止频率到电压环带宽频率范围内,积分因数可以忽略。
比例增益的计算公式为
当截止频率为电压带宽的其中一个阶段,此时的积分增益表达公式为
ki=ωb/5
(12)
通过对电压带宽动态参数的控制,实现了电压幅值目标函数的优化,将比例控制策略与积分控制策略相融合,根据输出电压幅值实时变化调整控制参数,达到设计优化、控制优化的目的。既能实现控制系统的快速响应,又能消除PMDDG运行系统的稳态误差。同时减少了外界因素变化对电压幅值的影响,提高了系统的稳定性。
在引用目标函数算法基础上,完成电压带宽稳态参数优化控制,为了防止动态参数解耦陷入局部最优解,需要求取已经优化控制的参数全局最优解。
2.3 基于人工蚁群算法(AACO)的全局参数动态优化
蚁群算法(ACO)是蚂蚁在寻找食物来源的过程中,会随机地选择一条路线,即使没有明显的引导,它们也能根据不同的情况找到最短的路线。与此同时,为了实现与同伴的信息交流,蚂蚁会向自己的周围释放一种特殊的外激素,这种外激素由蚂蚁自身释放,它们能够感应到目前地表的外激素含量,并且向其移动。整个过程一开始是随机和没有重复的,当蚂蚁发现了食物,就会用外激素来加强它们与蚁巢的关联度,蚁群之间通过这种信息的互通完成食物的搜索。外激素含量高的路径对蚁群有较大的吸引力,引导蚂蚁在最佳路径上收敛。
AACO算法是基于对实际蚁群动态的分析基础上而产生的,它具有一定的记忆储存能力,能够将蚂蚁经过的节点标记。这种动态反馈机制使得更多的蚂蚁在蚁巢与食物之间的最短路线上移动,最终整个蚁群都在最佳路线上行进。
假设当前蚂蚁为x,其移动速度方程为
vx(t+1)=zvx(t)+[qx-mx(t)]+[he-mx(t)]
(13)
式中,t为迭代次数;mx表示蚂蚁当前坐标点;qx表示蚂蚁最佳坐标点;he表示蚁群中全体蚂蚁当前最佳坐标点;z为权重系数。
蚂蚁的坐标点更新迭代表达式为
mx(t+1)=mx(t)+vx(t+1)
(14)
为了避免陷入局部最优,使蚂蚁能够自适应地改变初始路径,扩大食物搜索范围,得到空间搜索半径为
式中,mmax为蚂蚁坐标点上限极值;mmin为蚂蚁坐标点下限极值。当r(t)较大时,蚂蚁搜索范围较大,使得蚂蚁离开当前范围搜索更优路线;当r(t)较小时,确定当前蚂蚁本次迭代的探索范围,应用自适应寻优策略,更新蚂蚁移动速度方程为
vx(t+1)=zvx(t)+[qx-mx(t)]+[he-mx(t)]+
[r(t)-mx(t)]
(16)
当蚂蚁的移动速度加快,探索范围也随之变大,收敛速度也相应地提高。通过扩大搜索空间,构建最佳行进路线,从而求得全局最优解。
根据以上AACO算法的全局寻优,能够在复杂的搜索空间中进行全局的最优搜索,实现了永磁直驱发电机稳态运行参数的全局动态优化。
3 实 验
为了验证本文提出的风电场大容量风电机组永磁直驱发电机稳态运行参数动态优化方法的可靠性,进行实验。使用灰色PID控制器优化方法、非奇异终端滑模优化方法,和本文提出的永磁直驱发电机稳态运行参数动态优化方法进行实验对比。
3.1 实验参数设置
以东北某大型风电场风电机组为例,风电场总容量为18 MW,单机容量为2 MW,布设9台风电机组,风叶轮半径为55 m,机组通过升压变压器升压到35 kV,标准电压幅值范围为0.95~1.05(p.u.),额定风速10.5 m/s,定子电阻为0.548 Ω,极对数18。通过MATLAB仿真系统搭建PMDDG模型进行仿真实验,设置时间为8 s。
3.2 电压带宽参数稳态性能验证
分别使用灰色PID控制器优化方法、非奇异终端滑模优化方法,和本文提出的永磁直驱发电机稳态运行参数动态优化方法进行电压带宽参数稳态性能实验对比。电压幅值波动对比结果如图3所示。
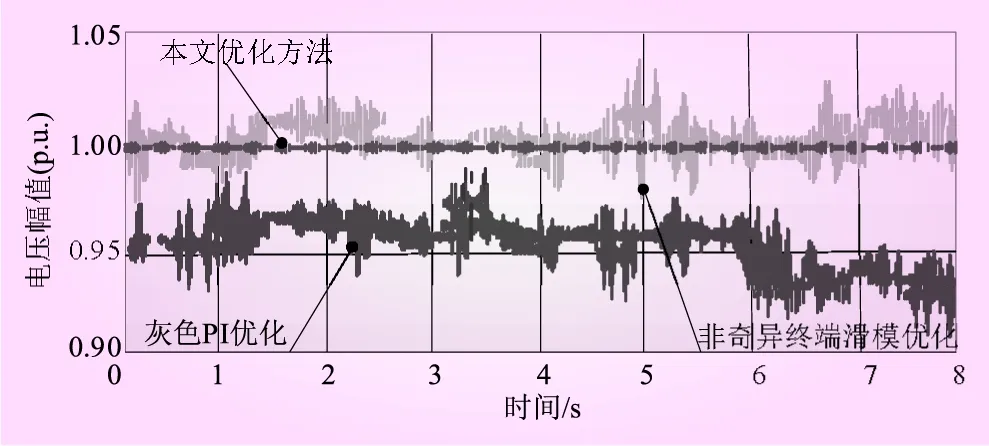
图3 电压幅值波动对比结果
通过图3可知,基于灰色PID优化方法电压幅值波动在0.92~0.98(p.u.),超出规定幅值范围,优化效果较差;基于非奇异终端滑模优化方法电压幅值波动在0.97~1.03(p.u.),虽然有一定的优化效果,但电压输出波形起伏较大,难以满足稳态运行需求。而本文提出的基于风电场大容量风电机组永磁直驱发电机稳态运行参数动态优化方法,在仿真时间内电压幅值始终维持在1(p.u.),说明该方法具有较好的电压稳态输出效果。
3.3 发电机转矩参数控制验证
为了进一步验证本文研究的优化性能,进行转矩波动实验对比。标准转矩波形如图4所示。
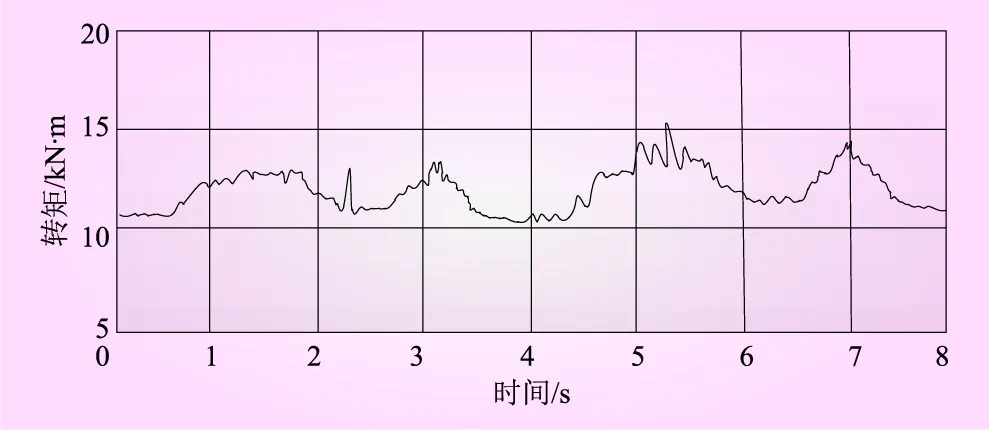
图4 标准转矩波形
使用灰色PID控制器优化方法、非奇异终端滑模优化方法,和本文提出的永磁直驱发电机稳态运行参数动态优化方法进行实验对比。转矩波形对比结果,如图5所示。
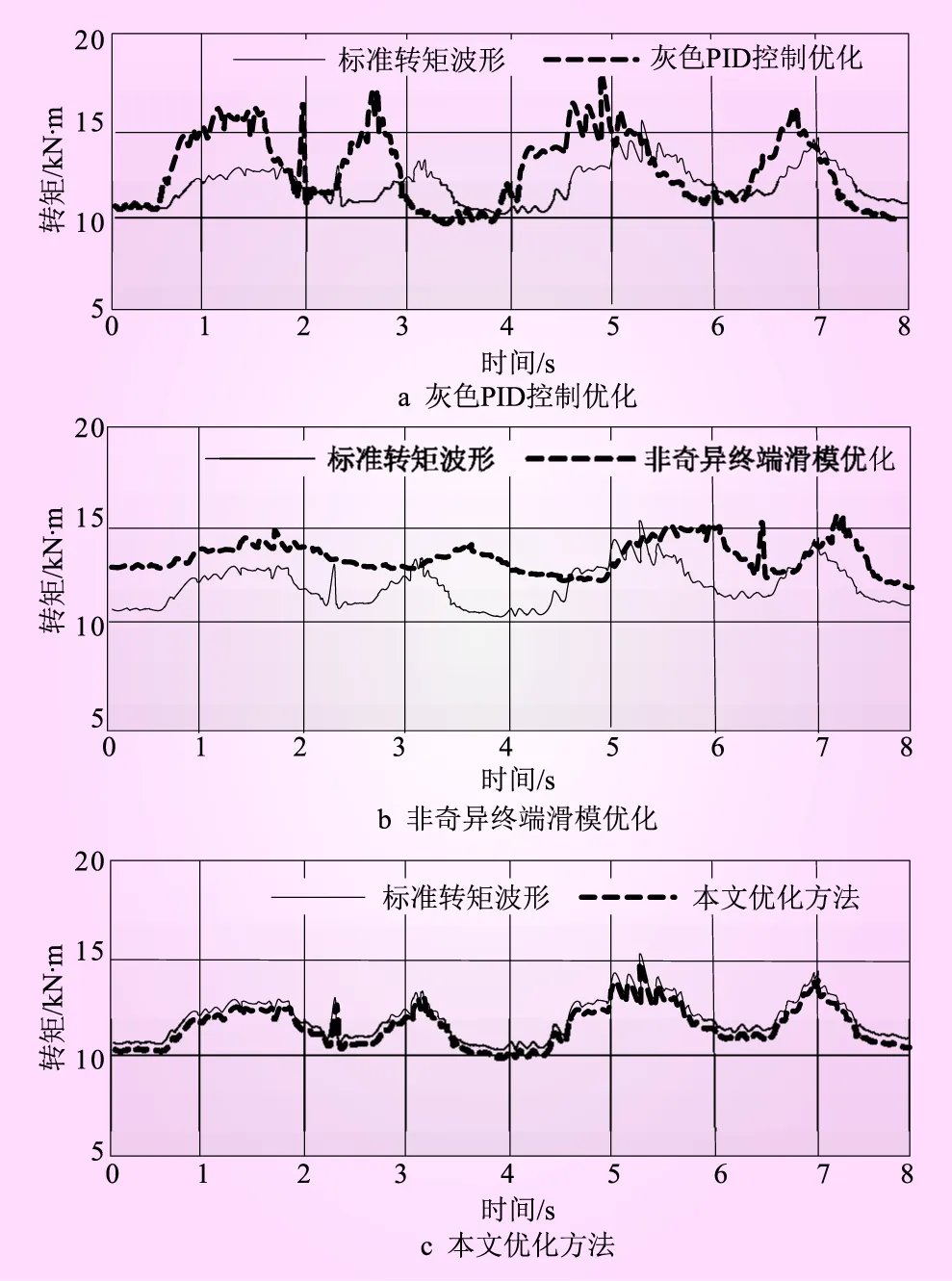
图5 转矩波形对比结果
根据图5可知,当仿真时间运行至2.5 s时,灰色PID控制优化方法转矩波形与标准转矩波形最大误差为3.9 kN·m;当仿真时间运行至3.5 s时,非奇异终端滑模优化方法转矩波形与标准转矩波形最大误差为2.5 kN·m;而本文提出的优化方法与标准转矩波形拟合度基本一致,最大误差为0.2 kN·m,稳定性极高。
以东北某大型风电场为例进行仿真实验,通过实验对比结果可以证明,本文方法能够对稳态运行的关键参数全面优化,有效实现系统稳态运行。
4 结 论
本文提出一种风电场大容量风电机组永磁直驱发电机稳态运行参数动态优化方法,通过研究得出如下结论:
(1)通过对稳态运行动态参数进行抓取,为实现风电机组稳态运行提供数据基础。
(2)采用PID控制器抑制转矩波动,提高系统运行稳定性能。
(3)引入目标函数有效实现电压环带宽控制,增强风电机组自适应能力,实现电压稳定输出。
(4)利用AACO算法实现参数动态全局优化,得到理想控制结果。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
上海大中型电机(2021年2期)2021-07-21 03:01:32
煤气与热力(2021年4期)2021-06-09 06:16:54
防爆电机(2020年6期)2020-12-14 07:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54