
基于对消盲区的极化敏感阵列分析与优化
2023-10-29 13:30高宏璋葛松虎
系统工程与电子技术 2023年11期
高宏璋, 葛松虎, 郭 宇,*, 孟 进
(1. 海军工程大学军用电气科学与技术研究所, 湖北 武汉 430033;2. 海军工程大学舰船综合电力技术国防科技重点实验室, 湖北 武汉 430033)
0 引 言
随着干扰技术的不断进步,单纯从某一维度出发的抗干扰技术已经不能适应日趋复杂的电子对抗环境,多域联合成为抗干扰发展的必然趋势[1-5]。极化敏感阵列可以同时接收信号的空域和极化域信息,从而得到比单域更多的目标与干扰之间的特征差异,因此其干扰对消能力更加强大,受到了学者的广泛关注[6-11]。
阵列的阵元排列方式对其性能有着巨大影响,阵列优化设计在通信、雷达等领域得到了广泛的应用。
在基于最小峰值旁瓣电平的优化方面,文献[12-15]利用蝙蝠算法、人工蜂群算法等,以峰值旁瓣电平为优化目标,通过改变阵元间距、阵元激励、阵元数目等得到最小峰值旁瓣电平。在基于方向图重构的优化方面,文献[16-19]提出酉矩阵算法等,这些算法可以在保证阵列的方向图与目标方向图之间足够近似的条件下,减少阵元数量,优化阵元的激励、位置。在基于最大阵列自由度的优化方面,文献[20-24]通过构造互素阵列,不仅得到最大自由度,而且得到了更大的阵列孔径。以上优化方法通过改变阵元间距、阵元激励、阵元数目等优化目标参数,然而改变阵元间距、阵元激励、阵元数目也会影响阵列的干扰对消性能,因此,在存在干扰的情况下,还需考虑优化结果对阵列抗干扰能力的影响。
在针对主瓣干扰方面,文献[25-26]设计了一种大孔径辅助阵列,该阵列不仅能有效地抑制了主瓣干扰,而且能够显著提高目标增益,但未考虑非主瓣方向的干扰。文献[27-30]研究了共点极化线阵的干扰对消性能,该阵列通过共点放置极化状态相互正交的天线,从空域和极化域两个维度对消干扰,从而提高了阵列抗干扰能力,但该阵列天线互耦严重,也没有指标衡量其抗干扰能力增强了多少。文献[31-32]研究了交替极化阵列的干扰对消性能,该阵列将共点极化阵列中的天线改为交替放置,降低了阵列互耦,但同时降低了阵列干扰对消能力。
在实战环境下,干扰信号可能为任意极化状态,可能从任意角度干扰阵列,但是现有的阵列优化方法中,一部分未考虑优化结果对阵列抗干扰能力的影响,一部分只针对特定的干扰做出了优化,未考虑阵列对其他干扰的抵抗能力。为了增大极化敏感阵列的有效对消范围,我们需要了解阵列能否有效对消可能面对的所有干扰,并减少不能对消的干扰。因此,本文首先基于方位角、极化幅角提出了对消盲区这一概念,分别建立了共点双极化线阵的空域对消盲区模型、极化域对消盲区模型和联合域对消盲区模型。然后基于对消盲区模型,推导了对消盲区的数学表达式,从而量化了阵列的有效对消范围,并给出了一种基于微元法的联合域对消盲区求解方法。之后,提出了基于对消盲区的极化敏感阵列优化方法,该方法能够通过优化阵元间距使对消盲区最小。最后,通过数值仿真验证了分析结论,并用该方法对四元双极化线阵进行优化,在探测阈值为12.6 dB、干扰频率为3 GHz、干噪比(interference to noise ratio, INR)为50 dB、信噪比(signal to noise ratio, SNR)为20 dB条件下,得出当阵元间距为0.096 9 m时,联合域对消盲区占比降至0.217%。
1 极化敏感阵列模型
极化敏感阵元由电振子和磁振子构成,是组成极化敏感阵列的基本单元。共点双极化线阵是最基础的极化敏感阵列,在共点双极化线阵中,阵元由两个正交的电振子共点放置,如图1所示,本节分析单个干扰条件下的共点双极化线阵输出信干噪比(signal to interference plus noise ratio, SINR),为建立对消盲区模型提供理论支撑。

图1 共点双极化线阵
如图1所示,共点双极化线阵由M个阵元组成,阵元间距为d,每个阵元由相互正交的两个偶极子(电振子)天线组成,其中沿z轴方向的天线为垂直极化天线,沿y轴方向的天线为水平极化天线,主天线为第一个阵元中的垂直极化天线,其余天线为辅助天线。
假设目标与干扰都在xoy平面内,即目标与干扰入射到阵元的俯仰角为θ=π/2,假设方位角分别为φs、φi,目标与干扰的极化幅角分别为γs、γi,极化相位差为φs、φi。令ass为目标空域导向矢量,aps为目标极化域导向矢量,令asi为干扰空域导向矢量,api为干扰极化域导向矢量,则有:
(1)
令as为目标信号联合导向矢量,ai为干扰信号联合导向矢量,则有:
as=ass⊗aps,ai=asi⊗api
(2)
式中:⊗为kronecker积。对于自适应波束形成准则,当期望信号方向和协方差矩阵已知且期望信号与干扰和噪声互不相关时,最大信噪比准则、最小均方误差准则与线性约束最小方差准则是等价的,因此阵列输出SINR可以表示为
(3)
式中:Ps为目标信号功率;Pi为干扰信号功率;Pn为噪声信号功率。
已知式(A⊗B)(C⊗D)=AC⊗BD,结合式(1)与式(2)得:
(4)
将式(4)代入式(3)得,共点双极化线阵输出SINR[29]为
(5)
2 对消盲区模型

2.1 空域对消盲区模型
当目标信号与干扰信号的极化状态相同时,阵列只能从空域对消干扰信号,因此只需考虑空域上的对消盲区。
在空域上,假设目标与干扰都在xoy平面上,令主波束始终对准目标,则有φs=0,令干扰信号的方位角φi在区间[-π/2,π/2]内变化。
在极化域上,令发射信号的极化状态为垂直极化,则目标信号的极化幅角γs=π/2,极化相位差φs=0。而干扰信号与目标信号的极化状态相同,则干扰信号的极化幅角γi=π/2,极化相位差φi=0。
在以上条件下,根据式(1),我们得到目标与干扰的导向矢量:
(6)
进一步计算,我们得到:
(7)

(8)
(9)
当仅考虑空域上的对消盲区时,将rINR、rSNR以及频率f看作定值,仅保留变量φi。于是得到干扰信号的判决函数L与阵列的对消阈值χ2为
(10)

(11)
令空域对消盲区为Bs,从而得到空域对消盲区模型为
(12)
2.2 极化域对消盲区模型
分析可知,当阵列仅依靠空域就可以对消干扰时,极化域对消盲区为0,只有当干扰信号的方位角φi位于空域对消盲区时,极化域上才存在对消盲区。因此,在分析极化域对消盲区时,需要同时考虑干扰信号的方位角。
在空域上,假设目标与干扰都在xoy平面上,目标信号方位角为φs=0,干扰信号的方位角为φi,φi已知且位于空域对消盲区。
在极化域上,假设目标信号的极化幅角γs=π/2,极化相位差φs=0。假设干扰信号为线极化,令干扰信号的极化幅角γi在[-π/2,π/2]内变化,极化相位差φi=0。
在以上条件下,我们得到目标与干扰的导向矢量:
(13)
将式(13)代入式(5),得到SINR表达式:
(14)
(15)
令极化域对消盲区为Bp,从而得到极化域对消盲区模型:
(16)
2.3 联合域对消盲区模型
当干扰信号的方位角与极化幅角为区间[-π/2,π/2]内任意值时,阵列可以从空域和极化域对消干扰信号,因此需要考虑空-极化联合域上的对消盲区。
在空域上,假设目标与干扰都在xoy平面上,目标信号方位角为φs=0,令φi在区间[-π/2,π/2]内变化。
在极化域上,假目标信号的极化幅角γs=π/2,极化相位差φs=0。假设干扰信号为线极化,干扰信号极化幅角γi在区间[-π/2,π/2]内变化,极化相位差φi=0。
在以上条件下,联合域对消盲区模型与极化域对消盲区模型有着相似的SINR表达式和判决函数L表达式,区别仅为前者φi未知,后者φi已知。则联合域对消盲区模型的对消阈值χ2不变,同式(11),判决函数L为
(17)
令空-极化域对消盲区为Bsp,从而得到联合域对消盲区模型:
(18)
3 对消盲区模型分析与基于对消盲区的阵列优化方法
为了进一步研究对消盲区的大小与阵元间距的关系,本节给出评判指标——对消盲区B。并基于对消盲区模型,推导B的数学表达式,进而分析B与阵元间距的关系,最后给出极化敏感阵列优化方法。
3.1 空域对消盲区分析
由式(9)得:
(19)
进一步得到:
(20)
分析式(20)可知,空域对消盲区在[-π/2,π/2]对称分布,因此只考虑[0,π/2]范围内的对消盲区。式(20)中只有ηi中包含d,因此需要先得出ηi的取值范围才能分析空域对消盲区与阵元间距d的关系。对于等式:
(21)
令式(21)大于0的第一个解为ηi=ε,则有ε∈(0,2π/M),且M越大ε越小。等式(21)解的形式为
ηi=ε,2π-ε,2π+ε,…,2nπ-ε,2nπ+ε,n为正整数
(22)
由式(22)可知,ηi的取值范围为(0,ε)和(2nπ-ε,2nπ+ε),由此可知,当φi∈[0,π/2]时,阵列对消盲区由多个子盲区组成。在[0,π/2]上,将子盲区按照方位角从小到大编号,用Bsn(n=0,1,…)表示,再结合ηi=(2πdsinφi)/λ,可得每个子盲区的大小:
(23)
由式(23)可知,随着d增大,子盲区的个数变多。分析可知,子盲区出现的原因是当ηi=2nπ时,β有最大值:
(24)
而判决函数L与β正相关,此时判决函数L增大且大于χ2,从而出现对消盲区。
(25)
--------------------
前面分析可知,M越大ε越小,又分析式(25)可得Bs与ε呈正相关。因此,空域对消盲区与阵元数目呈负相关。

通过以上分析,我们将结论总结如下:
(1) 空域对消盲区模型的对消盲区由多个子盲区组成,在[-π/2,π/2]上,对消盲区呈对称分布;
(2) 子盲区出现的原因是当ηi=2nπ时,β有最大值,导致判决函数L增大且大于χ2,从而出现对消盲区;

(4) 在[0,π/2]上,每个子盲区的大小表达式见式(23);

(6) 阵列的空域对消盲区Bs是一个分段函数,其表达式见式(25);

对于式(21)在(0,2π/M)范围内的解,我们无法求出其解析表达式,本文设计了算法1,在ηi∈(0,2π/M)范围内求其近似解ε。

算法 1 ε的求解算法求sin(Mηi/2)sin(ηi/2)=±1rINR+M M-χ1rSNR 在ηi∈(0,2π/M)的近似解ε目的:求解ε值输入:rINR、rSNR、M、χ1、a=0、b=2πM、D(精度)=10-6输出:ε步骤:1) 令x1=1rINR+M M-χ1rSNR ,计算x1的值;2) 令x2=sin(M(a+b)/2)sin((a+b)/2),计算x2的值;3) 令x3=x2-x1,计算x3的值;4) 判断|x3|是否大于D。如果|x3|≤D,则ε=(a+b);如果|x3|>D,则继续以下步骤;5) 判断x3是否大于0。如果x3<0,则令b=(a+b)/2;如果x3>0,则令a=(a+b)/2;6) 重复步骤2^步骤6,直到|x3|≤D。
3.2 极化域对消盲区分析

(26)
由式(26)可知,极化域对消盲区在[-π/2,π/2]上呈对称分布,因此只需分析区间[0,π/2]。而在[0,π/2]内只有一个极化域对消盲区,此时极化域对消盲区为
(27)

由第3.1节分析可知,当d=nλ,且φi=±π/2时,φi位于空域对消盲区,阵列从空域不能够区分目标与干扰。并且此时干扰信号的电场矢量所在平面刚好与y轴正交,导致极化状态为水平极化的天线不能接收干扰信号,从而阵列仅接收到干扰信号的垂直极化分量,阵列从极化域也不能区分目标与干扰,因此当d=nλ,φi=±π/2时,极化域对消盲区最大。
通过以上分析,我们将结论总结如下:
(1) 只有当干扰信号的方位角φi位于空域对消盲区时,极化域上才存在对消盲区;
(2) 极化域对消盲区在[-π/2,π/2]上呈对称分布,在区间[0,π/2]内只有一个对消盲区;
(3) 干扰信号方位角φi=0时,极化域对消盲区与阵元间距无关;当d=nλ且φi=±π/2时,极化域对消盲区最大;
(4) 当d=nλ,φi=±π/2时,干扰信号的电场矢量所在平面刚好与y轴正交,导致极化状态为水平极化的天线不能接收干扰信号,从而导致极化域对消盲区最大;
(5) 对于任意阵元间距d与位于空域对消盲区的φi,极化域对消盲区Bp表达式如式(27)所示。
3.3 联合域对消盲区分析
由第3.2节分析可得极化域对消盲区的大小Bp。因为只有当干扰信号的方位角φi位于空域对消盲区时,极化域上才存在对消盲区,所以在空域对消盲区内对Bp积分即可得联合域对消盲区。
在第3.1节分析中,空域对消盲区由子盲区组成,因此联合域对消盲区也由子盲区组成,按照空域对消盲区中子盲区的编号方式对联合域对消盲区进行编号,并用Bspn(n=0,1,…)表示。然后在空域对消盲区的各个子盲区范围内对Bp积分,得到联合域子盲区,如式(28)和式(29)所示。将d对应的所有子盲区相加,得联合域对消盲区,如式(30)所示:
(29)
--------------------
(30)
通过以上分析,我们将结论总结如下:
(1) 联合域对消盲区模型的对消盲区由多个子盲区组成,在空域和极化域对消盲区都呈对称分布;
(3) 在φi∈[0,π/2]、γi∈[0,π/2]上,每个子盲区的表达式见式(28)和式(29);
(4) 阵列的联合域对消盲区Bsp是一个分段函数,其表达式见式(30)。
3.4 基于对消盲区的极化敏感阵列优化方法
通过前面分析可知,共点双极化线阵的对消盲区受多种因素影响,阵元间距是影响对消盲区的重要因素之一,因此可以通过改变阵元间距,缩小阵列的对消盲区,从而提高阵列的干扰对消能力。
共点双极化线阵可以在空域和极化域对消干扰,因此在优化时需要考虑联合域对消盲区。而式(30)难以积分,无法直接得到对消盲区,但可以通过微元法求解式(30)。因此,我们设计了算法2,在指定区间(aλ,bλ)内,求解不同阵元间距下的对消盲区,得到对消盲区最小时的阵元间距。

算法2 阵元间距优化算法基于对消盲区的共点双极化线阵阵元间距优化算法目的:求解对消盲区最小时的阵元间距d输入:rINR、rSNR、M、χ1、λ、阵元间距离散度D、方位角离散度Ds、阵元间距取值范围(aλ,bλ)输出:d步骤:1) 将阵元间距在(aλ,bλ)内等间距取D个值,将其从小到大排列,得到序列A;2) 将方位角φi在[0,π/2]内等间距取Ds个值,则方位角微元为dφi=π/(2×(Ds-1)),将φi从小到大排列,得到序列C;3) 令k=i=1,r=π2/2,d=A(1);4) 令阵元间距为A(k);5) 利用式(23)得到空域对消盲区;6) 令方位角为C(i);7) 判断C(i)是否位于空域对消盲区,若位于空域对消盲区,计算式(27),得到极化域对消盲区Bp(i),若不位于空域对消盲区,令Bp(i)=0;8) 令i=i+1,重复步骤6^步骤8,直到i=Ds+1;9) 计算Bsp(k)=∑Dsi=1Bp(i)dφi,得到阵元间距为A(k)时,联合域对消盲区Bsp(k);
4 数值仿真

4.1 空域对消盲区仿真
通过算法1,我们得到ε=0.192 5,则λε/(2π)=0.031λ。定义空域对消盲区占比为Rs=Bs/π,再结合式(25),我们得到如图2所示的空域对消盲区占比示意图和空域对消盲区分布图。

图2 空域对消盲区
由图2(a)可以看出,四元双极化线阵的空域对消盲区占比随阵元间距增加而上下振荡,而图中拐点坐标刚好等于nλ±(λε/2π),n=1,2,3,可见空域对消盲区的变化规律符合分析结论。
由图2(b)可以看出,在[-π/2,π/2]上,空域对消盲区呈对称分布;在[0,π/2]上,空域对消盲区模型的对消盲区由多个子盲区组成,且0号盲区先恒等于π,而后随d增大一直递减,n号盲区先随d增大而增大,而后一直递减,仿真结果同样符合分析结论。
为了探究盲区占比极小值的变化规律,我们在100个波长范围内,计算了所有极小值,得出了极小值的随阵元间距变化图。由图3可以看出,在100个波长内,极小值单调递增,因此在该范围内,出现的第一个极小值就是最小值。
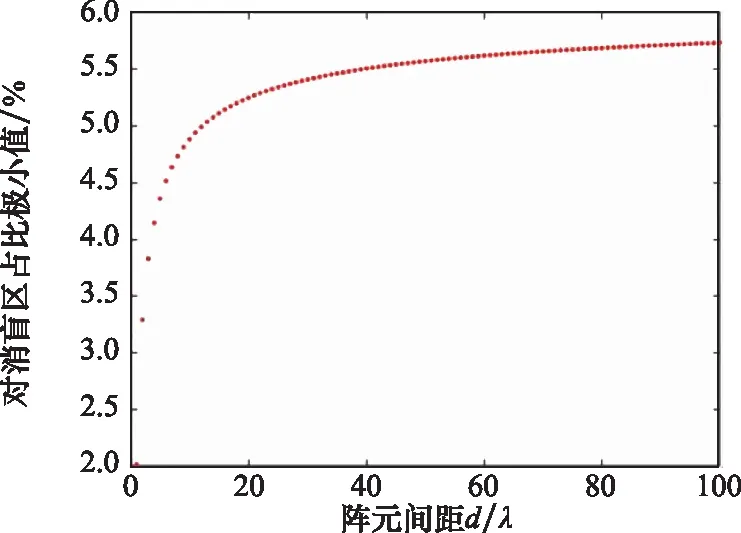
图3 空域对消盲区占比极小值
4.2 极化域对消盲区仿真
定义极化域对消盲区占比为Rp=Bp/π,取阵元间距d=4λ,再结合式(27),我们得到如图4所示的极化域对消盲区占比示意图和极化域对消盲区分布图。

图4 极化域对消盲区
由图4(a)可知,只有当干扰信号的方位角φi位于空域对消盲区时,极化域对消盲区占比才不等于0;当阵元间距d=4λ时,在φi=±π/2处,极化域对消盲区最大,此时极化域对消盲区占比接近100%。仿真结果符合分析结论。
由图4(b)可知,极化域对消盲区在[-π/2,π/2]上呈对称分布;在区间[0,π/2]内,对于某一个位于空域对消盲区的方位角,只有一个极化域对消盲区,可见极化域对消盲区的分布规律符合分析结论。
4.3 联合域对消盲区仿真
定义极化域对消盲区占比为Rsp=Bsp/π2。依据算法2,在区间(0,4λ)范围内,我们得到联合域对消盲区占比示意图。由图5可知,当d=0.096 9 m时,联合域对消盲区占比最小为Rsp=0.217%。

图5 联合域对消盲区占比
为了研究联合域对消盲区的分布规律,我们画出了如图6所示的不同阵元间距下的联合域对消盲区分布图。

图6 联合域对消盲区分布
由图6可知,联合域对消盲区在空域和极化域都呈对称分布,比较不同阵元间距对应的联合域对消盲区分布图可知,联合域对消盲区分布图由多个子盲区组成,随着d增大,子盲区的个数变多,其分布规律符合分析结论。
5 结 论
为了提高极化敏感阵列应对任意来向、任意极化状态干扰的抑制能力,本文首先提出了对消盲区这一概念,然后通过建立共点双极化线阵的对消盲区模型,推导了对消盲区的数学表达式,解决了阵列有效对消范围的量化问题。之后进一步提出了基于对消盲区的极化敏感阵列优化方法,该方法能够通过优化阵元间距使对消盲区最小。最后通过数值仿真验证了分析结论,并运用算法2对四元双极化线阵进行优化,得出在探测阈值为12.6 dB、干扰频率为3 GHz、INR为50 dB、SNR为20 dB条件下,当d=0.096 9 m时,联合域对消盲区占比最小为Rsp=0.217%。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
军民两用技术与产品(2021年10期)2021-03-16
卷宗(2021年2期)2021-03-09
空间科学学报(2020年4期)2020-04-22
铁道通信信号(2018年12期)2019-01-31
资源再生(2017年4期)2017-06-15
西南交通大学学报(2016年4期)2016-06-15
海峡科技与产业(2016年3期)2016-05-17
中国农业文摘-农业工程(2016年5期)2016-04-12
河南科技(2015年18期)2015-11-25
