
建筑物地基二次沉降变形位移智能检测仿真
2023-10-29 01:47:46熊黎黎
计算机仿真 2023年9期
熊黎黎,贾 璐
(1. 南昌航空大学土木建筑学院,江西 南昌 330069;2. 南昌大学建筑工程学院,江西 南昌 330031)
1 引言
工人在建筑楼房时,地基的稳固是必不可少的一部分,但露天开采会破坏地基地表平衡,导致地基边缘位置稳定性差,极易出现建筑坍塌、建筑质量低、稳固性差的问题,这种现象对工作人员及设备都会产生安全影响。而我国地质结构复杂、地形地貌起伏较大,南方地区容易出现地质灾害,导致建筑地基出现二次变形的现象[1-2],地基岩土边坡的失稳或滑动给工程建设及人民生命财产带来严重损失。为了保证人民群众的生命安全,需要对建筑地基二次形变检测方法展开研究,从而避免地质灾害造成的危害。
王军飞等人[3]提出地基合成孔径雷达的边坡形变监测应用研究方法,利用粗差探测技术对PS点解缠处理,通过对边坡的监测数据,取得PS点在监测期间的时间序列形变,以此实现地基二次形变检测,该方法的确立结果存有误差,存在检测效果差的问题。宋强等人[4]提出基于匹配点变形估计的布标缺陷检测算法,通过获取的地基形变图像,利用光流法计算出图像与待检测图像之间的匹配点运动适量,通过逆变换去除待检测图像的受力形变,从而实现二次形变检测,该方法获取的图像不完善,存在检测精度低的问题。刘俊博等人[5]提出基于激光点云的铁路边坡表面形变检测方法,通过检测雷达装置与三维点云数据采集系统,获得铁路周边环境的三维点云。与铁路场景先验知识配准算法相结合,通过获取基准点云数据,计算出地基边坡表面变化量,实现形变检测。该方法的处理结果不妥当,存在检测可行性低的问题。
为了解决上述方法中存在的问题,提出基于神经网络的建筑地基二次形变检测方法。通过采集与处理建筑地基二次形变数据,获得二次形变差异图,利用NSCT方法融合差异图像,并提取其特征向量,通过BP神经网络实现建筑地基二次形变检测。
2 数据采集及处理
2.1 数据采集
由于建筑地形内部结构复杂,为此以激光雷达、惯性测量单元、GPS地形扫描系统作为采集设备[6]。根据选取的采集设备,分别对激光雷达、惯性测量单元及GPS接收机的基准时钟表述:
T=ts=tc=tg
(1)
式中,T表述基准时钟,ts表述激光雷达时间参量,tc记作惯性测量单位时间参量,tg表述GPS时间参量。
根据设定结果,选取1个控制器调节采集系统的多线程运行模式,从而确保数据采集有效性。分别设置各个采集设备、采集目标,利用下式表述激光雷达的采集目标,定义如下:
s={t,sx,sy,sz}
(2)
式中,s表述采集的地基数据目标,t表述采集时间,sx、sy、sz均表述x、y、z三个轴向的地形地基位置信息。
惯性测量单元采集的地基数据目标定义:
c={t,cy,ce,ch}
(3)
式中,c表述采集的目标数据,cy表述仰角信息,ce表述侧角信息、ch均表述航向信息。
GPS的建筑地基采集数据即可定义为:
g={t,gj,gw,gc}
(4)
式中,g表述GPS采集数据,gj表述地基经度信息,gw表述纬度信息,gc表述高程信息。
选取的地形扫描装置设备的实际输出值会影响建筑地基形变数据采集效果,为确保数据采集可靠性,需要利用控制系统改进采集设备,因而设立的控制逻辑表示如下:
K=(Ti,Pis,Pic,Pig)
(5)
式中,K表述多线程控制指令,Ti表述参量设置,Pis表述激光雷达采样效率,Pic表述惯性测量单元采样效率,Pig表述GPS接收机采样效率。
通过单一指令控制采集设备对建筑地形形变数据的不同单元采集,以此避免滞后影响。
针对以上设置的控制逻辑,对采集的地基形变数据波动情况分析,为此综合激光雷达、惯性测量单位、GPS数据信息采集后的波动情况,利用下式计算表示:

(6)
式中,ε表述波动强度,st、st-1表述相邻采集时刻所采集的数据,ct、ct-1表述相邻时刻惯性测量单元采集结果,gt、gt-1表述相邻时刻GPS采集的数据,T表述基准时刻。
从方程(6)可以看出,当ε的取值越高时,说明所采集的建筑地基二次形变数据波动强,证明该地形采集结果复杂;反之说明形变稳定。
将上述过程作为基础,设定数据采集过程中的参数,定义如下:Ki/ε≤d。式中,Ki表述目标指令,d表述地基形变采集数据精度。
根据设定结果,从而实现建筑地基二次形变数据采集。
2.2 变差异图获取
基于采集的建筑地基数据,采用数字成像技术对采集的数据处理,获取建筑地基二次形变差异图。考虑到图像像素点周围特征,利用均值对数比表述获取的差异图,定义如下:

(7)
式中,(i,j)表述像素点,Xd表述差异图,m1(i,j)表述X1图像位于像素点的均值,m2(i,j)表述X2图像的均值。
由于图像之间的相干系数会对图像的相似度产生影响,所以采用相干系数获取成像处理后变化区域较明显、背景信息较平滑,因而两个图像的相干系数定义如下:

(8)
式中,*表述共轭复数,Xm(i,j)表述相关系数取值。
2.3 差异图处理
由于获取的差异图中子带图像与原始图像内部细节一致,所以根据NSCT的特点及优势,采用NSCT处理获取的差异图[7-8],达到去噪目的后融合差异图像[9],有利于更好的捕捉图像细节,便于检测出建筑地基二次形变。
采用拉普斯金字塔滤波器、方向组滤波器作为滤波设备,分别对差异图Xd、Xm采取NSCT变换,取得两种差异图像之间的低频系数,即Ld、Lm,高频系数Hd、Hm,从获取的系数中反映出高低频图像信息。
为了使图像的二次形变区域更加明显,采用加权平均法进一步处理图像低频系数,令图像与系数融合,那么低频系数计算如下:
Lf=αLm+(1-α)+Ld
(9)
式中,Lf表述融合后的低频系数,α表述加权平均融合系数。
经上述融合处理后,采用NSCT方法对Lf与差异图Xd、Xm反变换,从中取得融合后的差异图像Fd、Fm。采用局部能量法对背景图像噪声数据抑制,最终融合后的差异图像定义如下:
(10)
式中,Ed(i,j)表述差异图Fd的局部能量,Em(i,j)表述Fm的局部能量,Li,j表述像素中心,F(m,d)(q)表述第q个像素值,Fh表述合成后的差异图。
2.4 差异图特征提取
通过对差异图像的滤波处理及融合,取得建筑地基二次形变融合差异图。采用PCA方法提取融合差异图像的二次形变特征[10-11],根据分块思想划分融合差异图,成为n个3×3的相邻小块,同时不具备重叠性。为此将各个小块看成矩阵,对其转换成列向量,利用下式计算出全部小块均值向量。
(11)
式中,Pt表述列向量,m表述均值向量,t表述分块数量。
重构所有列向量,将其重构为尺寸大小为32×n的矩阵,定义为S,因而利用下式计算S的协方差矩阵,表示如下:

(12)
式中,T表述矩阵转置。
由于协方差矩阵C的尺寸为32×32,对其特征分解后获取特征值、特征向量,从中挑选出相应特征向量后构成正交基。因而向量构成的矩阵由A,该矩阵A的大小尺寸在32×r。
依据融合后的差异图Fh,挑选出图像各个像素的邻域小块,对小块转换后取得列向量,即Yη,其中η=1,2,…,k,k表述图像总数量。
将列向量映射到矩阵A中,其定义如下:
Yη=AT(Vη-m)
(13)
式中,Yη表述提取的特征向量,AT表述转置矩阵。
融合差异图中的各个像素都可以通过R维特征向量表述,为此根据图像像素点[Y1,Y2,…,Yk]组建成特征向量空间Q,以此实现建筑地基差异图形变特征向量的提取。
3 建筑地基二次形变检测
根据提取的建筑地基差异图二次形变特征向量,将其输入到建立的神经网络中训练[12-13],从而实现建筑地基二次形变检测。
结合小波神经网络思想,改进激励函数,为此提取出图像相位信息:
h(x)=cos(5x)·e-x2/2
(14)
式中,h(x)表述相位信息,e表述误差。
设置网络输入数量由R表述,节点输出由N表述,那么神经网络中第p个样本的第n个节点的输入用下式定义:

(15)
式中,k表述隐含层单元数量,M表述输入层单元数量,ωn,k表述各个单元之间的连接权值,ak表述伸缩因子,bk表述平移因子,SP(xm)表述输入信号,fn,p表述输入期望。
为此输出层函数通过下式定义:
(16)
式中,fz表述输出层,e-z表述输出层函数。
根据设置结果,将形变特征输入到网络内训练从而实现建筑地基二次形变检测,其具体流程如下所示:
1)对提取的特征样本数据预处理[14-15],用下式定义:

(17)

2)采用主成分分析法分析提取的特征向量,并确定神经网络输入节点。
3)初始化网络设置相关参数,即学习效率a、动量系数b、迭代误差e。
4)向网络中输入一组学习样本特征向量,设置输入节点为输入向量,并将fn,p输入其中。
5)根据特征向量在网络中的自学习流程,基于神经网络当前参数,进一步计算网络的实际输出。当输出误差小于e时,则训练结束。
6)若不满足上述条件,进一步实施误差反向传播,进一步修正神经网络参数。
7)利用修正后的神经网络再次训练形变特征向量,其输出结果就是最终检测结果。
基于上述流程,实现基于神经网络的建筑地基二次形变检测。
4 实验与分析
为了验证基于神经网络的建筑地基二次形变检测方法的整体有效性,需要对该方法开展实验对比测试。
采用基于神经网络的建筑地基二次形变检测方法(方法1)、地基合成孔径雷达的边坡形变监测应用研究方法(方法2)和基于激光点云的铁路边坡表面形变检测方法(方法3)实施实验测试。
1)滤波效果
开展建筑地基二次形变检测前,为保证建筑地基二次形变检测可靠性,将某城市施工场地建筑地基作为本次实验场景,详情如图1所示。

图1 建筑地基场景示意图
采用地基SAR系统工作,并按照每20分钟采集一张建筑地基黑白图像,且相邻的图像数据采集间隔时间为5分钟,连续采集5天即可获取建筑地基序列图像,有利于检测建筑地基二次变形。那么设定地基SAR系统工作参数,详情如表1所示。
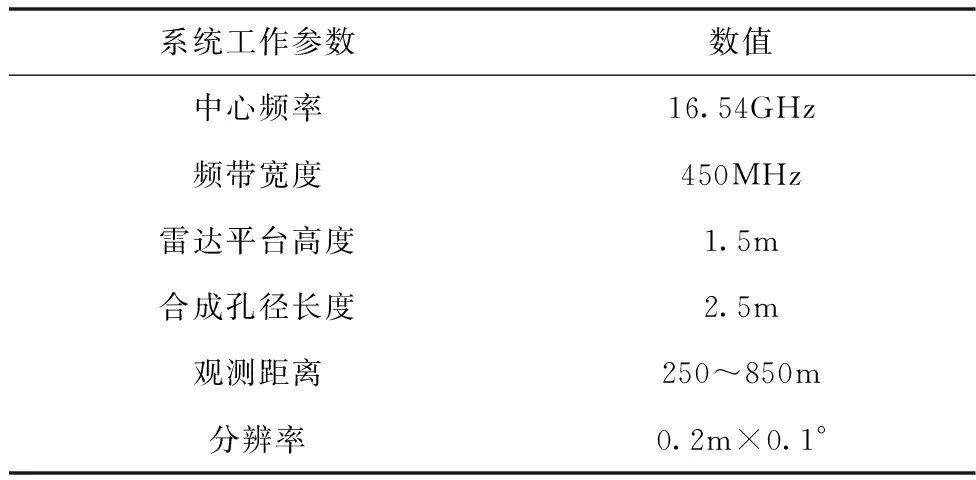
表1 地基SAR系统工作参数
由于采集的建筑地基图像内会因为噪声影响致使图像相位点出现不连续的断点,导致相位解缠失败,影响建筑地基二次形变检测效果,所以为了可以获取高质量图像,降低残差点数目,需要对采集的图像滤波处理,从而达到抑制噪声的目的。
那么利用方法1、方法2和方法3分别对具有噪声的建筑地基图像滤波处理,三种方法的滤波效果测试如图2所示。

图2 三种方法的滤波效果测试
从图2的实验结果可知,方法1对含噪声的建筑地基图像滤波处理后,图像更能体现出内部细节信息,验证了该方法的滤波性能强。而方法2、方法3在滤波处理时,处理后图像内部依然存有较多噪声,同时方法2的处理结果与原始图像相同,说明方法2的滤波效果不佳,也因此证明方法2和方法3的滤波效果要低于方法1。
2)形变位移检测
在上述研究的基础上,将Visual Studio.NET用作开发平台,C++用作开发语言,SQL Server作为数据库平台,根据连续五天采集的建筑地基图像数据,结合贝叶斯估计方法,分别利用方法1、方法2和方法3对建筑地基二次形变开展详细检测,测试结果如图3所示。
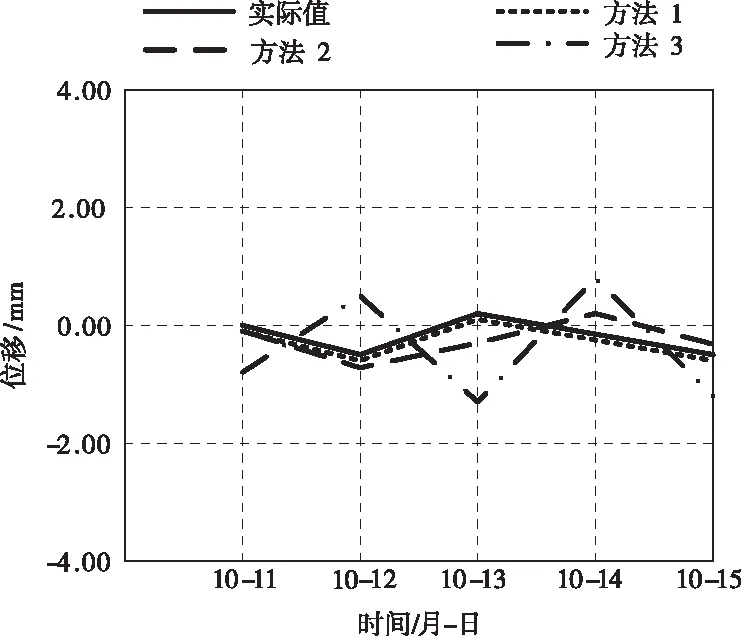
图3 建筑地基二次形变检测测试
分析图3中的数据发现,选取的采集时间分别为10月11~10月15日,根据检测结果可知,方法1的位移测试结果与实际位移结果基本一致,且运动轨迹相同,表明方法1的检测精度最佳。而方法2的在10月11日~10月13日时,运动轨迹与实际结果相同,但两者之间存有误差,同时方法2在10月13日~10月14日时运动轨迹发生转变,偏离实际轨迹,可见方法2的检测效果不佳。方法3的整体检测结果与实际轨迹相差大,说明方法3与实际结果偏差高。
综上所述,方法1的检测结果明显优于其余两种方法,这是因为方法1对获取的图像实施滤波处理,以此消除图像内的噪声,更有利于捕捉图像细节,从而提升了该方法的建筑地基二次形变检测效果,使其具备更高的检测精度。
5 结束语
建筑地基二次形变导致建筑边缘位置稳定性差,为有效避免这种问题,提出基于神经网络的建筑地基二次形变检测方法。
该方法采集了建筑地基二次形变数据,对采集结果成像处理后,获取建筑地基二次形变差异图,通过对图像的滤波处理及特征向量的提取,将其输入到建立的BP神经网络内训练,其输出结果就是最终检测结果。实验表明所提方法的滤波性能强,且位移检测结果与实际值基本一致,检测精度高,该方法在建筑地基二次形变检测方法中发挥着重要作用。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
保定学院学报(2022年2期)2022-04-07 02:26:50
电子制作(2019年19期)2019-11-23 08:42:00
许昌学院学报(2018年4期)2018-05-02 12:27:37
中华建设(2017年1期)2017-06-07 02:56:14
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
海军航空大学学报(2015年4期)2015-02-27 13:45:47
