基于PWPF调制技术的飞机飞行姿态控制系统软件设计
2023-10-28 10:24陈宣文
计算机测量与控制 2023年10期
陈宣文,孟 强,田 浩
(航空工业西安航空计算技术研究所,西安 710068)
0 引言
随着现代航空事业的高速发展和技术的不断革新,飞行控制系统的设计也在不断地改进和提高,飞机飞行姿态控制系统是航空事业中最为核心、最为关键的组成部分之一,它对飞行安全、稳定性和舒适度有着重要的影响[1-3]。飞行姿态就是指飞行器设备的三轴坐标在空间环境中相对于某一条参考轴线、某个特定参考平面、某固定坐标系统的节点状态[4]。对于飞行器设备而言,飞行姿态既决定飞机的行进动向,也影响飞行高度与方向[5]。对于飞机飞行姿态的控制就是为使其行进轨迹在多波段范围内都能得到按需调制,且这种控制指令的实现完全借助软件执行程序[6-8]。飞机飞行姿态控制系统软件必须具备高效、准确、稳定的控制能力,同时适应不同的环境变化,保证飞机飞行过程中的安全、稳定和舒适性。为此,相关领域研究学者纷纷对飞机飞行姿态控制做出了研究。
文献[9]设计基于STM32的多传感器控制系统按照四元数互补滤波算法,对飞机飞行姿态进行解算,再联合采集到的姿态数据样本,实现对轨迹节点的精准计算。文献[10]设计面向半实物仿真飞行平台的测试系统,根据飞行测试参数,模拟控制指令运行程序,再通过量化分析的方式,确定程序指令执行原则。文献[11]提出基于Port Hamiltonian系统的固定翼飞机飞行控制方法。利用Port Hamiltonian系统对飞机建模,设计了静态反馈控制律,利用开环系统的Port Hamiltonian系统设计控制李亚普诺夫函数。所需飞行条件的渐近稳定性在大的吸引力区域内得到保证。然而上述3种方法并不能在X波、C波、S波、L波的全域波频范围内,实现对行进轨迹的有效控制,故而并不完全符合实际应用诉求。
为解决上述问题,设计基于脉宽脉频(PWPF,pulse-width pulse-frequency)调制技术的飞机飞行姿态控制系统软件。PWPF是基于脉宽脉频的波信号调制方法,可以自由协调脉冲波的宽度与频率水平,从而按照既定波频原则将连续控制量等效成为与之对应的离散控制量。飞机飞行姿态控制系统软件根据时钟配置情况,设置CAN通信接口,并检测导航仪与舵机状态,结合偏航距离校正结果,优化核心控制程序。建立自抗扰闭环,使用PWPF调制技术进行控制机制定义和二次规划函数求解,在对反步控制器进行非线性建模的基础上,基于PWPF调制技术设计飞机飞行姿态控制系统。
1 各软件模块功能的设计
飞机飞行姿态控制系统软件功能的实现需要时钟模块、CAN通信接口、核心程序指令等多个部分的共同配合,各软件模块的总体结构如图1所示。

图1 飞机飞行姿态控制系统软件模块总体结构
如图1所示,偏航距离校正模块、时钟模块及导航仪、舵机状态检测模块均由CAN通信接口实现数据样本的输入与输出,并传输至核心控制程序,实现各模块数据的传输与控制。本章节将针对其具体设计方法展开研究。
1.1 时钟配置
时钟是飞机飞行姿态控制指令的循环回路,负责精准协调时间,并可以根据信号样本的单位输出总量,判断当前情况下时钟回路的配置情况是否与控制指令的执行需求相匹配[12]。从宏观角度来看,时钟回路内必须安排多个CAN通信接口,且在程序指令传输过程中,这些接口组织必须对飞行姿态数据进行同向传输处理,如果在软件系统执行周期内,存在通信接口与数据样本不匹配的情况,那么就有可能出现控制指令不及时运行的问题。对于时钟回路的配置,要求飞机飞行姿态数据样本的单位累积量必须小于软件控制系统对程序指令文本的最大存储量[13]。飞机飞行姿态数据样本单位累积量的求解满足如下表达式:
(1)


(2)
1.2 CAN通信接口
CAN通信接口负责飞机飞行姿态数据样本的输入与输出,在指令程序符合差分信号查询原则、时钟回路支持CAN2.0协议文本的情况下,软件控制系统通信接口对于数据样本的传输速率可以达到1 Mbit/s。CAN2.0协议文本、差分信号查询原则同时作用于CAN通信接口的主要作用机制,可以在接收时钟回路输出的飞机飞行姿态数据样本的同时,经过多次转换处理,制定控制指令文本,从而使得系统主机能够在多波段范围内实现对飞机姿态节点的按需调度与控制[14]。具体的CAN通信接口运行原则如图2所示。

图2 CAN通信接口运行原则

(3)
如果对飞机飞行姿态数据样本进行重复取值,则有可能导致控制程序出现重复执行的情况,因此为解决上述问题,v1≠v2≠…≠vn的不等式取值条件必须成立。
1.3 导航仪与舵机状态的检测
导航仪与舵机状态的检测可以验证CAN通信接口对于飞机飞行姿态数据的传输能力,因此在设计软件控制系统的过程中,还应对公式(2)所求得结果进行重新赋值。
1.3.1 导航仪状态检测
导航仪状态检测就是对飞机导航仪设备运行能力的检测,对于软件控制系统而言,在协调飞行轨迹时,各个姿态节点所处位置都会对导航仪设备运行能力造成影响。导航仪状态检测表达式如下:
(4)
其中:τ1表示飞机行进轨迹内符合导航仪检测规则的姿态节点定义参数,υ1表示符合导航仪检测规则的数据样本传输参数。
1.3.2 舵机状态检测
舵机状态检测可以理解为对飞机舵机元件运行速率的检测,为使软件系统能够对飞行姿态数据进行有效控制,要求舵机设备运行速率必须处于稳定状态。舵机状态检测表达式如下:
(5)
式中,τ2表示飞机行进轨迹符合舵机检测规则的姿态节点定义参数,υ2表示符合舵机检测规则的数据样本传输参数。由于软件控制系统无法协调非正常情况下的飞机飞行姿态,所以默认在检测导航仪与舵机状态时,不存在设备元件非正常运行的情况。
1.4 偏航距离校正
进行飞行状态后,导航仪与舵机设备会不停地向软件控制系统主机发送飞机飞行姿态数据。那么在正式完成软件设计之前,就需要对飞机偏航距离进行校正[16]。因为在单独控制一个飞机飞行姿态数据样本时,导航仪与舵机设备的运行状态都只能对应单一的控制程序指令,故而只要发生多样本共同传输的情况,就有可能导致飞行轨迹出现错误分布的情况,而在完成偏航距离校正后,就可以打破飞行姿态数据样本与控制程序指令之间的单一对应关系,从而使得软件系统主机能够对姿态数据进行有效控制。完整的飞机飞行姿态偏航距离校正处理原理如图3所示。

图3 偏航距离校正原理
设O1(x1,y1)为实际飞行姿态节点,O2(x2,y2)为偏航距离校正后的飞行姿态节点,α1为实际姿态节点与坐标原点O(x0,y0)之间的夹角,α2为校正后节点与坐标原点的夹角,α为α1与α2的合角。联立上述物理量,可将偏航距离校正表达式定义为:
(6)
理想状态下,点O1应与点O2完全重合,因此数值方面,角α既可以等于α1+α2,也可以等于α1或者α2,只不过后两者的实现条件更加苛刻。
1.5 核心控制程序
核心控制程序是软件控制系统运行所遵循的基础程序文本,影响软件执行设备对导航仪与舵机状态的检测结果,作为偏航距离校正表达式的补充说明条件,其执行需要CAN通信接口的配合,因此相较于其他类型的程序文本,在飞机飞行姿态控制系统软件中,运行核心控制程序所受到的限制作用更加明显。由于飞机飞行姿态控制系统软件的设计遵循PWPF调制技术,而后者的执行包括顺序、乱序两种方向性措施,所以软件控制系统核心程序的执行也包括顺序执行、乱序执行两种方式。
1)顺序执行原则(如图4):指的是编码数据与程序文本保持一一对应关系、且指向性序列不发生交叉的程序运行方式,对于飞机飞行姿态控制系统软件而言,大多数程序指令的执行都满足顺序原则。
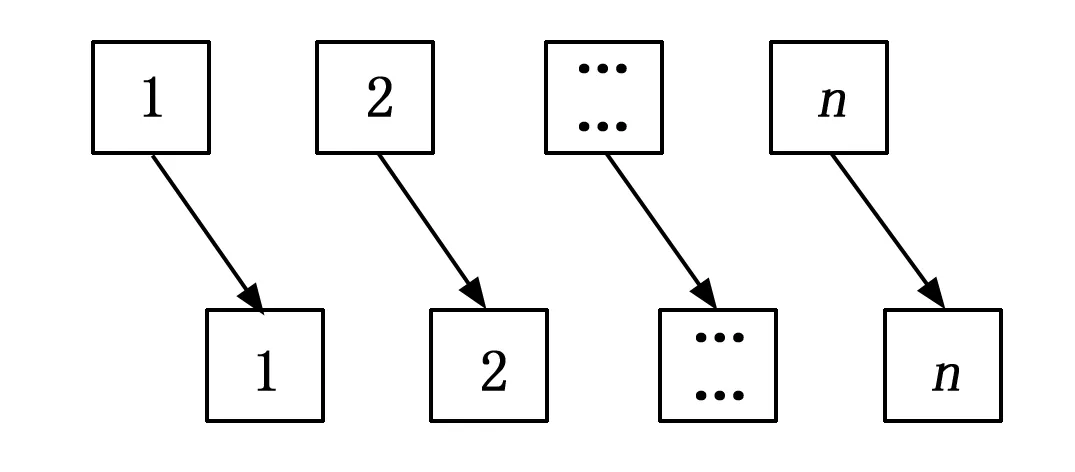
图4 顺序执行原则
2)乱序执行原则(如图5):指的是编码数据与程序文本保持一一对应关系、但指向性序列发生明显交叉的程序运行方式,相较于顺序执行原则,符合该类型执行原则的程序指令相对较少。
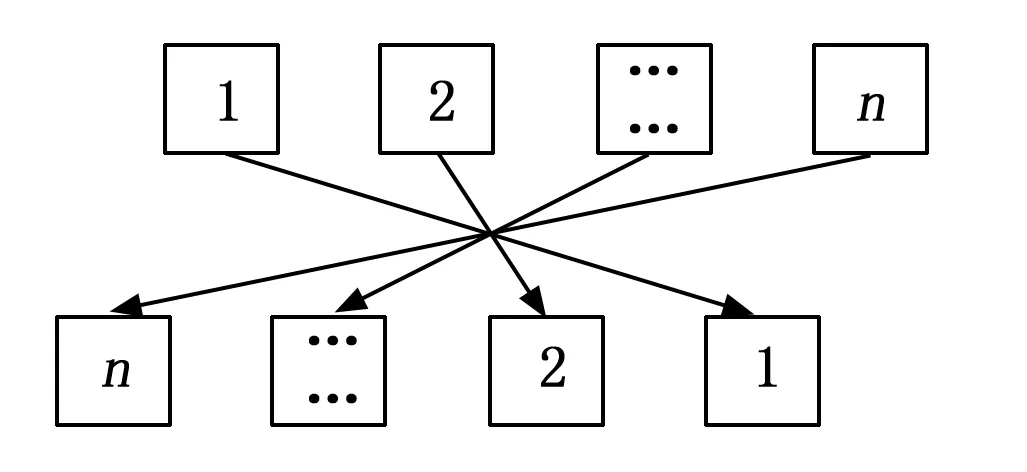
图5 乱序执行原则
如果程序文本同时符合顺序与乱序原则,那么前者的执行等级更高。
2 基于PWPF调制技术的控制机制
PWPF调制技术作为飞机飞行姿态控制系统软件的执行基础,可以在自抗扰闭环结构中进行静态调制,并根据飞机飞行姿态数据的当前传输状态,求解二次规划函数表达式。
2.1 自抗扰闭环结构
自抗扰闭环结构是PWPF调制技术的基础执行单位,由外环门控制机制、内环门控制机制、PWPF调相等多个环节共同组成。外环门控制机制负责处理飞机飞行姿态角指令,是自抗扰闭环结构中的首个判别环节,接受软件控制系统核心程序的直接调度,其所输出程序文本影响偏航距离的校正处理结果[17]。内环门控制机制是外环门控制机制的下级判别环节,具有一定的辨别能力,能够根据飞机飞行姿态数据的传输状态,判断CAN通信接口对于软件程序指令的剩余承载能力。PWPF调相是自抗扰闭环结构中的核心环节,向下控制软件系统的时钟回路,能够对X波、C波等多种波段信息进行聚合处理,并按照自抗扰积分算法,再次制定姿态角指令文本,从而实现程序指令在软件控制系统内的循环运行。完整的自抗扰闭环结构布局形式如图6所示。
时钟回路可以同时辨别多种不同的波段信息,且软件控制系统的最主要执行目的就是在多波段对飞机行进轨迹进行同时调节,所以自抗扰闭环结构按照积分算法编写姿态角指令时,不需对波段信息进行细致区分。
2.2 PWPF调制的静态作用

(7)
飞行姿态数据出现取值方向不一致时,表示飞机正在进行往复行进任务,此时可对正、负方向上映射投影向量的最大与最小取值结果进行求取平均值处理。
2.3 二次规划函数
二次规划函数从函数建模的角度对PWPF调制技术的作用表达式进行定义,在静态作用条件下,可以通过飞机飞行姿态数据二次取值的方式,确定软件系统对数据样本的处理能力,在偏航距离校正参量达标的情况下,函数表达式所带来的约束作用与软件系统的执行能力完全相同[19]。
基于PWPF调制技术的二次规划函数表达式为:
(8)
其中:ϑ表示既定飞机飞行姿态数据的二次取值结果,h表示基于PWPF调制技术所选取的数据样本规划参量。特定情况下(如持续加速或持续减速运动),飞机飞行姿态数据的取样结果必然出现不规律的情况,此时所求得二次规划函数只有部分表达式与软件系统的执行能力保持一致,对于非规律性样本的计算,则可以采用连续取样的方式,使其能够在更小的数值区域内呈现出规律分布的状态[20]。
3 飞机飞行姿态控制行为建模
飞机飞行姿态控制行为建模就是按照PWPF调制技术作用原则,所求解的控制作用约束表达式,包括反步控制器定义与非线性建模表达式求解。
3.1 反步控制器
在飞机飞行姿态控制系统软件中,反步控制器是执行PWPF调制指令的核心机制,能够按照期望行进轨迹,采集飞行姿态信息,并按照二次规划函数表达式,实现对节点信息参量的按需调节[21-22]。选择反步控制器闭环中的一个关键轨迹对象,并求解与该轨迹节点相关的姿态信息定义条件,具体定义式如下:
(9)

在式(9)的基础上,设μ、ν表示两个不相等的反步调试参数,且μ≠0、ν≠0的不等式取值条件同时成立,联立公式(8),可将反步控制器机制的运行表达式定义为:
(10)
由于反步控制器机制的设置遵循PWPF调制技术,所以闭环机制所提取到的飞机飞行姿态数据可供控制系统软件的直接调取与利用。
3.2 非线性建模表达式

(11)
至此,实现对相关参数指标的计算与处理,在PWPF调制技术的支持下,完成对飞机飞行姿态控制系统软件的设计。
4 实例分析
4.1 实验原理与流程
本次实验的主要目的是验证所选用系统软件能否对飞机飞行姿态进行有效控制。在实际应用过程中,飞机行进轨迹必须适应多种不同的波频信号,对于控制系统软件而言,若在波频信号的全部波频范围内都存在飞机行进位移,则表示系统软件能够对飞行姿态进行有效控制;如果波频范围内不存在飞机行进位移或行进位移只能存在于部分波频范围内,则表示系统软件对于飞机飞行姿态的控制能力相对有限。
本次实验选用X波、C波、S波、L波四类波频信号,其波频范围及具体波长如表1所示。

表1 波频范围与波长
在四类波频信号作用下,分别记录飞机行进位移。
本次实验具体实施流程如下:
1)选择基于PWPF调制技术的飞机飞行姿态控制系统软件作为实验组方法,基于STM32的多传感器控制系统作为对照(1)组实验方法,面向半实物仿真飞行平台的测试系统作为对照(2)组实验方法;
2)改变信号波长,使信号波频分别与X波、C波、S波、L波的波频范围相符合;
3)记录4种不同波频信号作用下,飞机行进位移的数值变化情况;
4)根据实验结果,总结实验规律。
4.2 实验结果
图7~10反映了飞机行进位移的具体数值变化情况。

图7 飞机飞行姿态曲线(X波)

图8 飞机飞行姿态曲线(C波)

图9 飞机飞行姿态曲线(S波)
图10 飞机飞行姿态曲线(L波)
X波的波频范围内:实验组、对照组系统软件作用下,主机元件都可以捕捉到完整的飞机飞行姿态曲线,且对照(1)组、对照(2)组飞机的飞行位移明显大于实验组。
C波的波频范围内:实验组、对照组系统软件作用下,主机元件依然可以捕捉到完整的飞机飞行姿态曲线,然而对照(1)组、对照(2)组飞机飞行位移却出现了明显下降的变化态势,实验组飞行位移却依然保持持续升高的数值变化状态。
S波的波频范围内:实验组、对照(2)组系统软件作用下,主机元件可以捕捉到完整的飞机飞行姿态曲线,但明显前者的数值水平更高;对照(1)组系统软件作用下,当波频达到8.0 GHz时,飞机飞行位移已经为零,表示当前时刻,主机元件无法捕捉到飞机的飞行姿态曲线。
L波的波频范围内:实验组系统软件作用下,主机元件可以捕捉到完整的飞机飞行姿态曲线,但其数值水平存在明显变化状态;对照(1)组系统软件作用下,主机元件始终无法捕捉到飞机飞行姿态曲线;对照(2)组系统软件作用下,当波频达到9.6 GHz时,主机元件无法捕捉到飞机的飞行姿态曲线。
综上可知,基于STM32的多传感器控制系统、面向半实物仿真飞行平台的测试系统作用下,系统软件对于飞机飞行姿态的控制能力均会受到一定的限制性影响,不满足多波段同时调节飞机行进轨迹的应用需求,而在基于PWPF调制技术的飞机飞行姿态控制系统软件的作用下,系统软件始终可以对飞机飞行姿态进行有效控制,与其他系统软件相比,更符合多波段同时调节飞机行进轨迹的实际应用需求。
5 结束语
飞机飞行姿态控制系统软件在PWPF调制技术的基础上,重新配置了时钟回路,又联合导航仪与舵机状态的检测结果,建立自抗扰闭环结构,从而在推导二次规划函数的同时,求解非线性建模表达式。相较于基于STM32的多传感器控制系统、面向半实物仿真飞行平台的测试系统,这种新型系统软件的应用,可以在多波段同时调节飞机行进轨迹,使其飞行姿态能够受到软件程序的有效控制。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
自动化学报(2019年6期)2019-07-23
现代营销(创富信息版)(2018年6期)2018-09-05
自动化学报(2018年2期)2018-04-12
电子制作(2018年1期)2018-04-04
现代营销(创富信息版)(2018年2期)2018-02-10
制造业自动化(2017年2期)2017-03-20
北京航空航天大学学报(2016年3期)2016-02-27
舰船科学技术(2015年8期)2015-02-27
空间控制技术与应用(2009年2期)2009-12-20