
无人机在架空输电线路中的研究综述
2023-10-27 05:34孙可可张超李晨张硕任琦张洪磊杨旭东
智能建筑与智慧城市 2023年10期
孙可可, 张超, 李晨, 张硕, 任琦, 张洪磊, 杨旭东
(1. 中电投工程研究检测评定中心有限公司;2. 中研建科(北京)工程检测有限公司)
1 引言
我国有众多的输电线处于恶劣的自然环境中,在长期经受自然天气以及人为方面的影响下,输电线路会出现损坏与异常。为了保障输电线的正常运转,工作人员需要对其进行定期检查。另外人工巡检具有诸多弊端:受恶劣环境的影响,人员作业时要进行大量的安全措施工作,风险性较高;针对较长距离的输电线,需要投入大量的人力、物力和财力,成本较高,并且效率也难以保证[1-3]。人工巡检主要依靠相关的测量设备和各种传感器进行,常见的传感器主要是相机、摄像机以及激光扫描仪等,这些设备被做成背包式或者能安放在汽车中的移动式平台进行巡检。对于人工巡检来说,无论是否采用上述设备,人员都需要在巡检现场近距离完成作业。在山区,为了减少线路覆冰等自然灾害的发生,一般会选择植被更加茂密的地段进行布设输电线,交通状况也相应更加复杂,人工在这些地区进行作业将存在诸多危险。为了高效地对输电线路情况进行定期检测,无人机的使用无疑是一种有利的方法,且在很大程度上提高检查效率。
2 无人机平台的选取
无人机的硬件组成部分包括:无人机的机架、控制器、动力系统、图像采集模块组成[4]。图1为无人机的硬件组成。

图1 无人机硬件组成
目前无人机的机型种类比较多,但是真正用电力作业的无人机机型主要为多旋翼机型。这种机型的飞行器较多,机型上配置的飞行器数量也不同。多旋翼机型的操作简单,体型小巧,能够在特殊的天气进行作业,但是飞行距离固定,一般能够连续飞行的时间在1个小时之内,但是该机型的稳定性极高,通过控制器可以达到定点悬停,进而完成照片拍摄,如图2所示。

图2 数据采集飞行照片
其中,地面站控制系统主要的功能是操控无人机完成巡检工作,并且将无人机所拍摄到的图片、视频,以及各种数据信息进行回传。操作人员通过操作可以调配图像焦距,进一步了解输电线的故障点,从而针对性解决问题,如图3所示。

图3 地面站控制系统
3 无人机倾斜影像采集
无人机在进行倾斜摄影时,自身需要保持较好的稳定性,以抵抗外界干扰,这对于机器的控制而言显得尤为重要。原明超等[5]、张雪莲[6]、马廷超[7]、李鑫龙等[8]在大比例尺地形图的测量工程中应用了无人机倾斜摄影技术。彭向阳等[9]、xie等[10]将多传感器系统用于电力线路巡检中,通过大量实验分析了传感器对无人机飞行的影响。由于PID方法能够较好地对无人机姿态进行控制,这使得该方法得到广泛应用。
该方法将误差e的比例项、积分项和微分项进行线性加权组合,其(ut)的控制算法为:
式(1)中:KP为比例系数,KI为积分系数,KD为微分系数。三个参数的选取对控制器的性能具有较大影响。e(t)为控制器输入,表示给定值与被控对象输出值的差,称偏差信号;u(t)为控制器的输入。
4 输电线路状态预警
输电线路状态预警方法的研究主要有两种。一种是基于大数据、深度学习等计算机技术的预警方法。沈欢[11]采用了基于极限学习机和支持向量机的输电线路覆冰预测模型对输电线路进行预测。陆佳政等[12]综合考虑输电线的影响要素,提出山火密度时间序列预测模型。
目前计算机行业发展迅猛,为上述预警方法的实施提供了技术支撑与保障,但是现场检测由于自身环境复杂性的原因,仅仅靠计算机线上检测难以了解到现场的各方面问题,有时甚至会漏检现场的危险因素。因此,这类方法主要用于现场环境良好并且能够在线实时检测的场景。另一种方法是引进数学算法,对输电线路情况进行划分状态等级来进行分析。徐文宝[13]利用模糊评价方法进行预警,张卫东[14]利用改进的熵权模糊层次分析法对输电线进行质量评价。邹仁华[15]结合层次分析方法和模糊数学评价方法进行分析输电线路状态。上述方法利用数学算法对输电线状态进行预警,层次分析法和模糊数学评价法在进行指标划分时存在主观性较强的问题,现在输电线的状态较复杂,影响因素众多,利用数学算法进行分析就会存在计算过于复杂的问题。
5 弧垂计算方法
①异长法在观测档内两杆塔不等高时,且弧垂最低点不低于两杆塔根部连接线的场景较为常用。在观测范围内找好观测点视线与电线相切,得AA0=a和BB0=b。示意图4所示。由公式计算得出弧垂f。
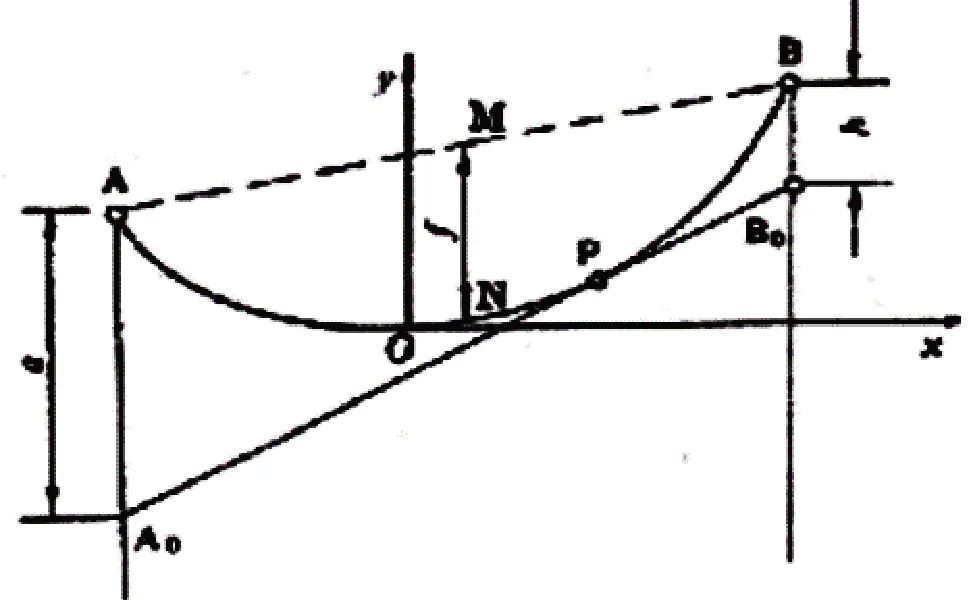
图4 异长法观测弧垂示意图
②角度法用于异长法不适用的山区或沟谷地段。利用经纬仪进行观测。测量示意图如图5所示。
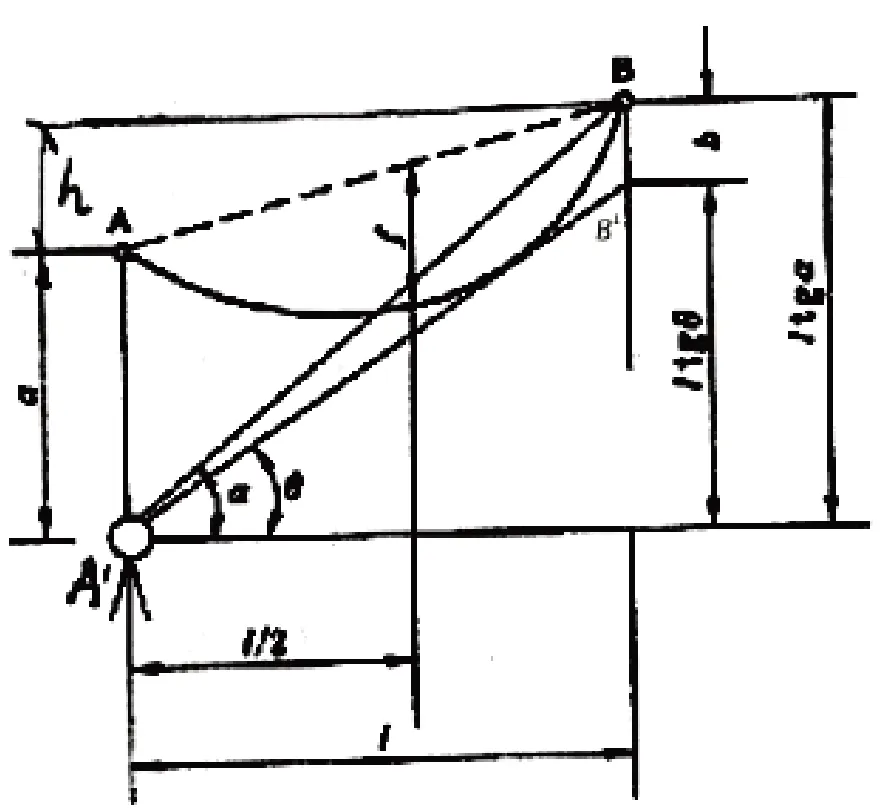
图5 档端法观测弧垂示意图
式(2)中:a为仪器中心点A1至点A的垂直距离,m;f为观测气温下计算出的档距中点弧垂,m;θ为仪器视线与导线相切的垂直角,即观测角;L为被测档距,m;H为两杆塔的高差,m。
③平视法主要是利用导线最低点的切线呈水平状态进行测量。由下式进行计算最大弧垂(见图6)。
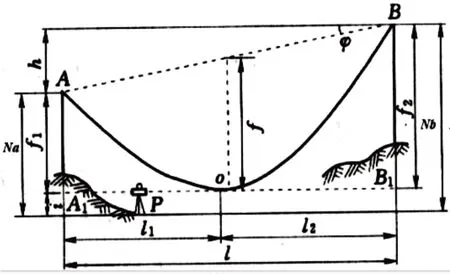
图6 平视法观测弧垂示意图
6 结语
由于我国电力线路覆盖面积广,人工检测受环境、地形和其他因素影响难以短时全面发现问题。本文介绍了无人机在输电线线路中的工程应用,从多方面分析了现状问题,为实现无人机对线路的智能化检测提供参考。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
家庭影院技术(2019年11期)2019-12-09
家庭影院技术(2019年1期)2019-01-21
通信电源技术(2016年3期)2016-03-26
中国共青团(2015年7期)2015-12-17
电测与仪表(2015年2期)2015-04-09
电测与仪表(2014年21期)2014-04-04
电测与仪表(2014年2期)2014-04-04
