
小电容驱动系统的无位置传感器控制设计
2023-10-26 00:50段璐瑶姚红兵
无线互联科技 2023年15期
段璐瑶,姚红兵,王 驰
(盐城工业职业技术学院,江苏 盐城 224005)
0 引言
传统单相交流驱动系统由三级电路组成:前级电路为单相不可控整流桥、中间级为脉动直流母线,通过并联容值几百至几千微法的电解电容进行稳压、后级电路采用三相逆变电路将直流电逆变成交流电,该拓扑结构如图1所示[1-3]。据统计,在驱动电路板正常工作情况下,导致电路板出现故障的原因很多。但是超过6成电路故障都是由于电解电容无法正常工作导致的[4-5]。为了解决这个问题,提高电路板使用寿命及可靠性,采用高性能、高可靠性的薄膜电容即小电容被诸多学者关注。由于小电容无法很好抑制逆变器逆变过程中产生的二倍频低次谐波,导致整个电机驱动系统运行受到一定影响[6]。
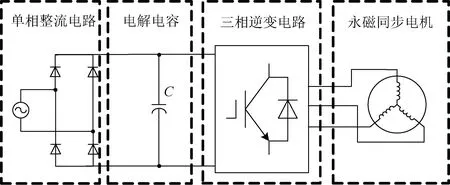
图1 传统永磁同步电机驱动系统框
小电容驱动系统中含有的低次谐波导致d-q轴参考电压产生波动,而滑膜观测器输入信号取自于d-q轴参考电压。因此,小电容驱动系统中采用无位置传感器估测反电动势信息误差增大。为此,国内外学者进行深入研究。齐江博[7]在d-q轴上搭建一个转子位置信息观测器,该观测器包含反馈矩阵、跟踪单元以及观察模块。该控制系统较为复杂,在小电容驱动系统中对二倍频谐波的抑制能力不足。黄盈亮等[8]构建虚拟坐标系,并在该虚拟坐标系上估算转子位置信息。但是,未考虑虚拟坐标系与实际坐标系之间的误差,观测精度会因虚拟坐标系构建精度不足产生误差。罗辉在传统滑模观测器控制策略中,将扩展反电动势与q轴电流进行解耦,降低小电容驱动系统中,低次谐波对观察精度的影响,取得一定的效果[9]。
本文针对小电容驱动系统工况对无位置传感器控制策略的影响,提出一种变换坐标系滤波的控制策略。选择在同步选择坐标系上进行谐波抑制,不仅能够很好地消除谐波影响,同时对于估测的反电动势信息不产生负面影响。提取不包含谐波的反电动势信息,通过锁相环精确地估测出转子位置信息。本设计通过实验验证该控制策略的可行性。
1 改进滑模观测器获取转子位置信息
传统无位置控制策略流程为:取自于d-q轴参考电压作为滑膜观测器输入信号,经滑模观测器获得估测反电动势,低通滤波器用来消除高频斗振,最后通过锁相环获得转子位置信息。然而,无位置传感器控制策略无法抑制小电容驱动系统中存在的二倍频谐波污染。
为提高在小电容驱动系统中无位置控制策略的估测精度,本设计提出一种变换坐标系滤波的控制策略。其工作原理如图2所示:将α-β轴交流性质反电动势eα、eβ经park变换为d-q坐标系直流性质ed、eq,α-β轴上的谐波被再次变换回二倍频谐波。该控制策略有效区分出反电动势和谐波分量,经过谐波抑制环节,消除二倍频谐波,有效提高小电容驱动系统中无位置传感器控制估测精度。具体工作原理如下:
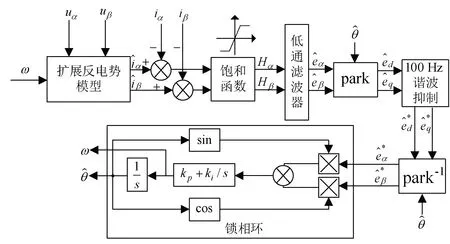
图2 改进滑模观测器原理框
首先通过滑模观测器获得eα、eβ:
(1)
eα、eβ由park变换得到ed和eq,其中eα、eβ基波分量经park变换得到ed0、eq0,如公式(10)所示:
(2)
式中:ed0、eq0分别为d-q轴直流分量。
(3)
(4)
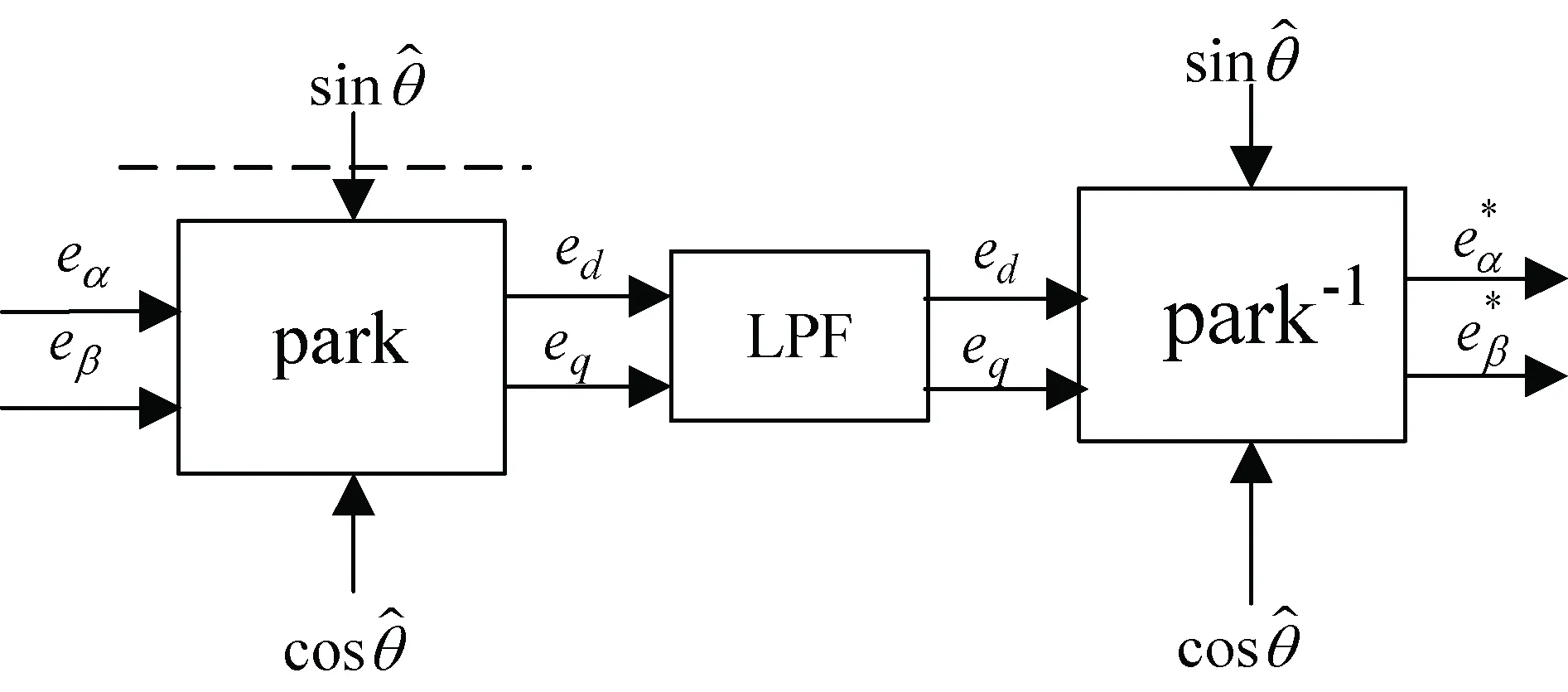
图3 二倍频谐波抑制模块
以上分析可知,通过park变换将eα、eβ变换回d-q坐标系下,反电动势基波分量转换为直流量,反电动势含有的谐波变换回单频率的100 Hz分量,且谐波频率不再随转速变化而变化,故本文所提出在旋转坐标系中抑制谐波能有效提高小电容驱动系统中采用无位置传感器估测精度。
2 实验验证
为验证改进滑模观测器控制策略的有效性,本设计搭建0.65 kW内置式永磁电机实验平台。为方便观测精度,平台增加增量式光电编码器测量转子实际位置与本文控制策略估测转子位置进行对比。平台实验采用各类关键参数如表1所示。图4是矢量控制算法和改进滑模观测器试验平台,电机控制是基于矢量控制算法的基础上研究进行的。
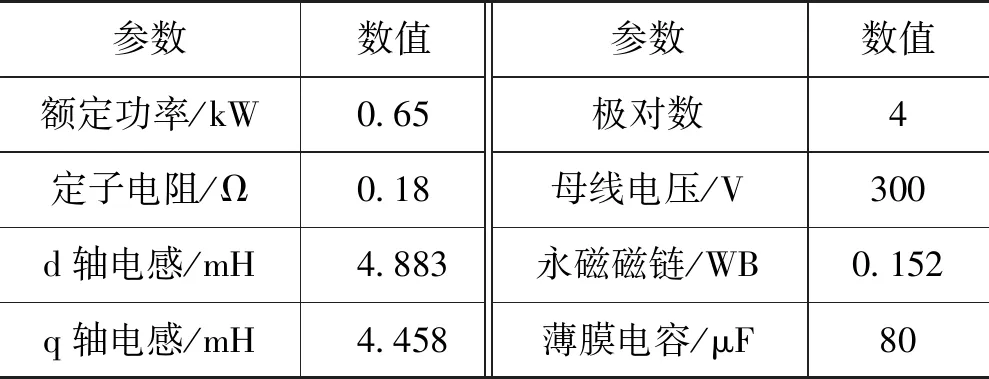
表1 实验参数

图4 实验平台实物
图5(a)(b)分别为传统滑模观测器与改进型滑模观测器获得电机转子位置信息。可以看出,改进滑模观测器获得转子位置信息更为精确,验证本文理论可行性。
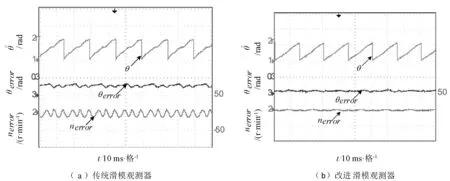
图5 估测转子位置信息波形
3 结语
本文提出的改进滑模观测器控制策略,将反电动势eα、eβ变换至d-q坐标系,有效区分出反电动势和谐波分量,经过谐波抑制环节,消除二倍频谐波,改善该系统中无位置传感器控制估测精度。通过锁相环计算转子位置和转速,本设计消除转子位置和转速观测值谐波脉动误差,提高了观测精度。此外,本设计加入滤波环节结构简单且未引入新的需要调节参数,故调试难度低。通过实验验证,结果表明,本文所提出的控制策略能够有效减少小电容工况下转子位置和转速估算的谐波脉动误差,提高观测精度。
猜你喜欢
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
雷达学报(2018年1期)2018-04-04
铁道科学与工程学报(2015年5期)2015-12-24
大庆师范学院学报(2015年3期)2015-12-24
中国光学(2015年5期)2015-12-09
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年11期)2014-04-04
物理学报(2011年2期)2011-10-23
