小行星撞击探测自主导航与制导控制方法
2023-10-25 10:11朱圣英唐玉华
深空探测学报 2023年4期
刘 璟,朱圣英,唐玉华,徐 瑞
(1.北京理工大学 深空探测技术研究所,北京 100081;2.深空自主导航与控制工信部重点实验室,北京 100081;3.深空探测实验室,北京 100080)
引 言
小行星由于个体小、内部活动稳定、演化程度低,保存了丰富的科学信息,对研究小行星乃至整个太阳系的起源和演变非常重要,具有极高的探索价值[1]。对小行星高速撞击,分析由撞击产成的喷射物和在目标天体上形成弹坑的大小,可确定目标小行星的组成成分及内部元素[2];同时研究撞击后小行星轨道的偏移情况[3],验证动能撞击技术在小行星防御任务的可实现性。
导航与制导控制技术作为小行星探测器的关键技术,其水平决定了探测器的功能和性能,关系着探测任务的成功与否。先进的导航与控制方法,可提高探测器生存和运行的能力,是小行星探测技术研究的重心。在小行星探测对目标天体的撞击速度越快,产生的喷射物越多,观测效果越好,因此在撞击器接近目标天体过程中,一般相对速度都会很大,双小行星重定向测试(Double Asteroid Redirection Test,DART)撞击器的撞击速度6.144 9 km/s,而“深度撞击”(Deep Impact)撞击器的撞击速度达到了10.2 km/s,为精确撞击目标点,要求撞击器的导航与制导控制系统要具有较高自主性和实时性[1-2,4-8]。由于撞击过程速度快,撞击器主要依靠光学相机获取导航信息。D e e p Impact撞击器依靠携带的光学相机结合飞越器的辅助测量信息确定自身位置与视线方向[4]。Kawaguchi等[9]考虑光照因素对光学信息补偿,同时结合测距信息实现了视线方向的精确估计。Jia等[10]将光学与无线电测量信息相结合精确提取目标视线方向,进而完成撞击器状态的估计。撞击器制导方法研究主要集中在比例制导与预测制导。Deep Impact撞击器采用预测制导方法,在撞击过程中定时计算所需机动速度对轨道修正[4]。Junichiro等[11]基于比例制导提出拦截制导方法,控制撞击器视线旋转速度,实现目视矢量的惯性冻结。Liu等[12]提出增强比例制导律,实现了视线转角速率限制下,相对距离与相对速度在有限时间内的收敛。
本文对小行星撞击探测自主导航与制导控制技术进行了研究。分析研究了小行星撞击探测自主导航与制导控制系统的工作模式,设计了自主光学导航算法与轨道修正制导律。基于各关键技术的研究工作,研制了自主规划与导航原理样机,并搭建了小行星撞击探测自主导航与制导控制综合试验系统,开展了小行星撞击自主导航与制导控制地面半物理仿真试验,对所提出的方案及方法的性能进行了仿真试验。
1 坐标系定义与动力学模型
1.1 B平面坐标系定义
在深空撞击任务中,B平面坐标系是导航和任务设计中常采用的坐标系统,撞击器相对于目标天体位置及其相对应的协方差和撞击目标点均可很容易地表示在B平面上。B平面定义为通过目标天体的质心且垂直撞击器进入渐近线的平面,进入轨迹的渐近线方向与无穷远处的速度(V∞)方向一致,因此B平面垂直于V∞,如图1所示。B平面坐标系的原点在目标天体的质心上,其S轴垂直B平面并沿撞击器进入渐近线方向为正,T轴在目标天体公转轨道平面与B平面的交线上,R轴与S、T构成右手坐标系。
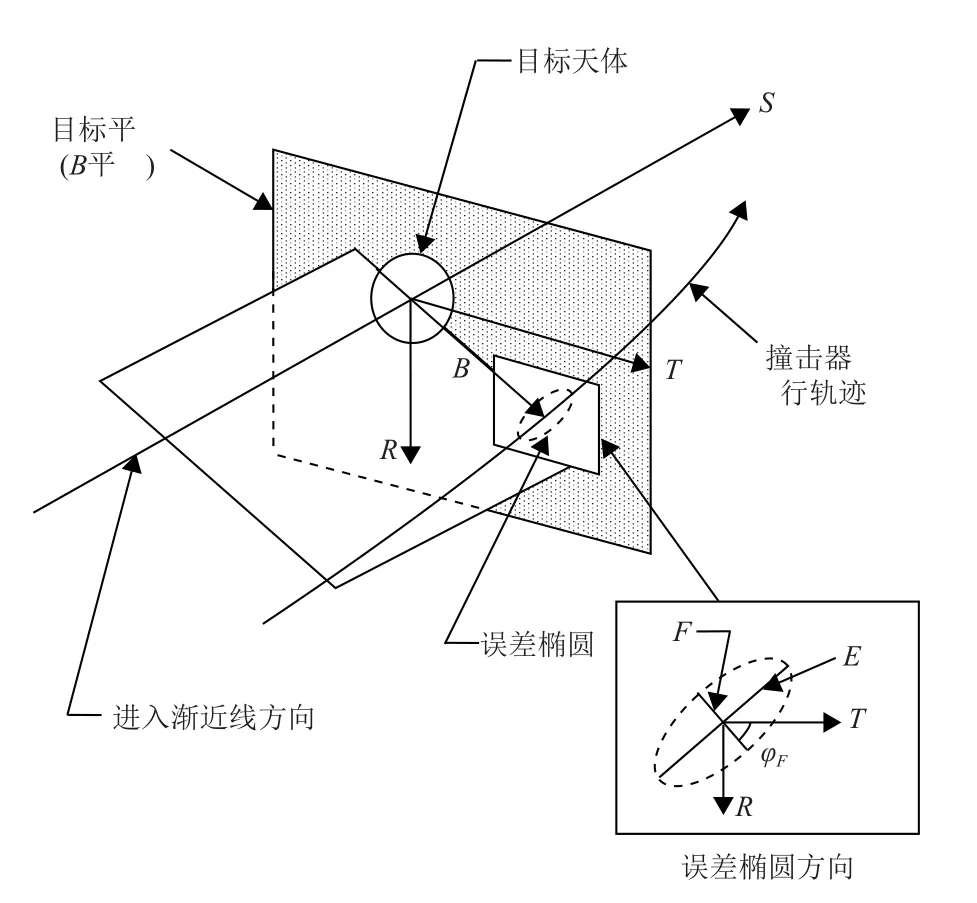
图1 B平面坐标系示意图Fig.1 B-plane coordinate system
由B平面坐标系定义可以得到B平面坐标系三轴在J2000惯性坐标系下的指向表示为
其中:h为目标天体的公转轨道角动量的单位向量;由以上定义可知,B平面坐标系三轴指向不变,其相对J2000惯性坐标系的坐标转换矩阵为
1.2 动力学方程
撞击器在飞行过程中,受到太阳引力和各大行星引力的干扰,如目标小行星、太阳光压力、控制力及由姿态控制等所引起的干扰力。撞击器在B平面坐标系中的动力学方程为
其中:r为撞击器日心位置;Si为第i个摄动星体的日心位置;μ为太阳的引力系数;µi为第i个摄动星体的引力系数;ν为遮挡因子,在深空撞击任务中由于无阴影遮挡,该值取1;CR为撞击器的光压系数;A为太阳垂直辐射的撞击器有效表面积;m为撞击器质量;ρ⊕为由太阳辐射光压在位于1 AU理想吸收表面上产生的作用力,其值为4.560 5×10–6N/m2;F为撞击器所受的控制力;n为撞击器所受的其它干扰力。
2 自主导航与制导控制系统模式分析
在撞击器进入接近段之前,规划系统需要根据撞击器状态对空间环境感知[13],考虑可用资源、可选动作、约束关系等对撞击过程中的自主导航与制导控制任务序列提前进行规划。同时,规划系统还具备重规划能力,当外界环境发生变化或动作执行失败原规划结果无法实现时,撞击器规划系统可根据任务执行情况和自身执行能力决策出新的自主导航与制导控制任务序列规划结果。
在撞击器接近目标天体的过程中,自主导航与制导控制系统需要自主地确定撞击器位置、速度和姿态信息,同时以任务规划序列为基础控制撞击器姿态使其携带的相机指向目标天体以拍摄科学与导航图像,并且驱动轨控发动机开关进行轨道修正,使撞击器最终撞击到期望的目标点。
自主导航与制导控制系统性能直接影响了整个撞击任务的成功与否,考虑到撞击器自主性和实时性要求,本文对自主导航与制导控制系统在不同任务目标下的工作模式进行分析。深空环境中,自主导航与制导控制系统常用的敏感器包括星敏感器、陀螺、加速度计、光学导航相机,执行机构包括飞轮、喷嘴、轨控发动机[1,14]。
在撞击器常规飞行模式下,姿态控制系统保证光学导航相机指向目标天体对其拍摄,通过对图像的处理可得到目标天体在像平面的光心坐标,该光心坐标与姿态确定系统提供的拍摄时刻撞击器的姿态信息将传送给轨道确定系统,通过基于最小二乘或扩展卡尔曼滤波器(Extended Kalman Filter,EKF)等滤波算法,可确定撞击器相对目标天体的位置、速度,该算法结构如图2所示。
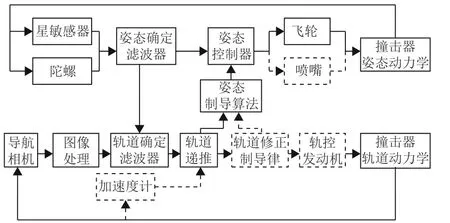
图2 常规飞行模式算法结构图Fig.2 Algorithm structure diagram of conventional flight mode
在撞击器执行轨道机动时,轨道修正制导律定时计算期望的机动速度增量,并将该速度增量传送给姿态制导系统,姿态制导系统根据该速度机动增量计算期望姿态,并控制撞击器机动到该期望姿态。执行轨道机动时,由于撞击器本体的震动及不能保证目标天体在相机的视场内等情况,无法提取目标天体的光心信息,这时只能依靠轨道动力学递推撞击器的接近轨道。在撞击器执行机动点火的状态下,利用加速度计测得作用在撞击器的控制加速度,结合撞击器轨道动力学模型确定撞击器相对目标天体的位置、速度信息。在发动机点火产生期望的速度增量后,姿态控制系统将撞击器的姿态重新调整回导航相机对目标天体定向模式。轨道机动模式的算法结构如图3所示。
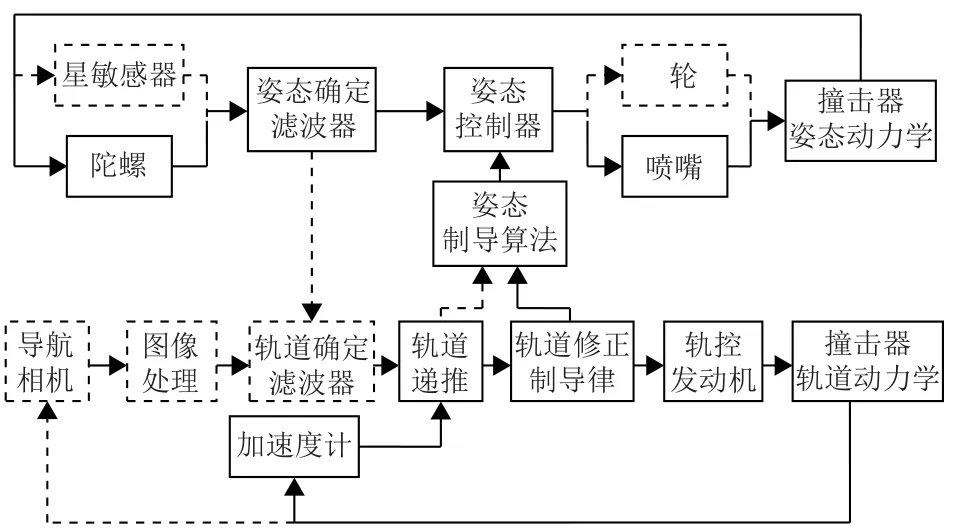
图3 轨道机动模式算法结构图Fig.3 Algorithm structure diagram of orbital maneuvering mode
反作用飞轮和喷嘴安装在撞击器三轴上,反作用飞轮主要用于稳定控制,而喷嘴主要用于大角度机动和飞轮卸载。姿态制导系统根据轨道确定系统给出的撞击器轨道信息及轨道制导系统给出的速度机动增量产生期望的姿态,姿态控制系统输出飞轮的控制电压或驱动喷嘴开关,控制撞击器姿态到达该期望姿态。
3 自主导航与制导控制方法
3.1 自主光学信息处理算法
撞击器在接近过程中通过相机拍摄目标天体图像,这时小天体在相机视场中的成像为一个亮点或亮斑,利用图像处理技术提取目标天体的光心,以光心代替质心坐标从而确定目标天体或导航星体的视线方向,实现光学导航特征提取。
在接近段拍摄的星体光度微弱,信噪比较低,导致相机拍摄的天体图像存在较多噪声干扰,因此需要对图像进行预处理来减少噪声对质心提取的影响。g(x,y)表示分割后的灰度值为
其中:f(x,y)定义为原始图像中的灰度值。
将图像第1列平均灰度值的2倍设置为分割阈值,具体公式为
其中:n代表图像的高度。
目标天体光心位置提取利用连通性分析对经过阈值处理后存储的二值化数据进行目标邻域判断得出目标点坐标,再利用打标记方法将各个目标的像元分离,获取每个目标点的像元像素坐标(i,j),最后以每个目标点为单位计算目标点的灰度均值。获取的目标天体光心位置坐标x0和y0为
其中:(x,y)为目标区域亮度中心;R为小天体所占的像素区域;Iij为有效点的灰度值。
由于目标信号的信噪比和A/D转换器的量化误差,导致星体在像平面中的成像不是绝对的圆点。将像素级中心作为固定维数窗口的中间点,只使用窗口加权质心法就可得到亚像素偏移。在x和y方向上的亚像素偏移被定义为(∆x,∆y),符号i和j是指窗口中的位置,j-(N+1)/2和i-(N+1)/2的值分别表示当前像素点和中心位置在x和y方向上的距离为
最后,将提取结果和修正方程结合,将坐标系从像素行和列坐标转换为方程中的笛卡尔值得到目标小天体的亚像素质心位置为
通过阈值分割,光心提取,亚像素光心位置误差修正[9]3个步骤,即可对光学信息处理,提取目标天体的光心。
3.2 自主光学导航算法
撞击器接近目标天体末段,在日心惯性空间中撞击器与目标天体,所处的位置相对不大,二者所受到的太阳引力、太阳光压及其它星体的引力产生的加速度亦相差不大,在不施加机动控制时,撞击器相对目标天体近似作匀速直线运动[11]。因此,在该导航算法中选用B平面坐标系下撞击器的简化动力学模型为
其中:X、分别是撞击器在B平面坐标系中的位置和速度矢量。
撞击器在接近目标天体过程中,导航相机对目标天体拍照,通过图像处理后,可得到目标天体的光心在相机像平面上的坐标(p,l),利用其为轨道确定系统的观测量[1]。假设目标天体的光心与质心重合,则不考虑噪声情况下,导航系统的观测方程为
其中:f为导航相机的焦距;x,y,z为撞击器在B平面坐标系三轴上的位置;RcB为相机坐标系相对B平面坐标系转换矩阵。
在已知撞击器相对目标天体速度大小的情况下,通过3次目标天体的光心观测,能够确定撞击器相对目标天体的位置。当撞击器相对目标天体速度方向、大小完全已知时,仅需通过2次观测就能求取撞击器的位置信息,其空间几何关系如图4所示。在实际飞行任务中,撞击器相对目标天体的初始速度的估计较精确,在巡航段末期依靠地面测控站的支持,对相对速度的估计精度已经能达到0.1 m/s量级[15],因此通过对目标天体光心的观测进行自主导航的方法是可行的。

图4 自主光学导航方法示意图Fig.4 Autonomous optical navigation method
为抑制测量噪声及初始误差带来的不确定性,在短时间内使估计量值收敛,这里选用扩展Kalman滤波方法设计滤波器,系统状态方程与观测方程可以求取,其初始误差方差阵由地面测控站的前期工作给出,观测噪声方差阵由导航相机的性能确定。
3.3 预测制导律
预测制导律的基本思想是在撞击器定时计算撞击器的接近轨道和撞击点,将计算得到的预测撞击点与期望目标点比较,利用其偏差产生控制信号,在保证燃耗和撞击器指向满足要求的条件下,施加机动速度,改变撞击器的接近轨迹,达到消除撞击点偏差的目的。在撞击任务中,预测制导律具有计算简单、抗干扰能力强、在深空环境中易实现等优点。
选取系统状态X=[x y z]T,其中x、y、z为撞击器在B平面坐标系下的三轴位置,为撞击器三轴速度,可建立撞击器的非线性动力学模型[1]为
在初始状态X(0)=X0,即在机动时刻的撞击器状态处,对式进行线性化,有
该系统的解为∆Xf=Φ∆X0,其中=AΦ,Φ(0)=I6×6。利用∆Xf=Φ∆X0,有
由于该制导方式为脉冲制导,即在初始时刻近似∆r0=0,并且在接近任务中对末速度没有严格约束,有
则期望的机动速度为
其中:∆rf为预测撞击点与目标撞击点的位置矢量差,预测撞击点由目标天体星历与当前撞击器状态通过数值积分得到,目标撞击点由目标天体星历和通过点在B平面上的位置给出。
考虑到线性化是在未对状态X修正∆v0处展开的,其系统矩阵A并不精确,因此需在修正∆v0后的状态处对动力学方程重新线性化展开,并进行∆v0迭代计算,直至达到期望精度为止。
撞击器在接近轨道定时利用预测制导律计算机动速度进行轨道机动的过程如图5所示。
图5 撞击器轨道机动示意图Fig.5 Impactor orbit maneuver
4 综合试验系统及仿真试验
半物理仿真将参试的撞击器控制系统各部件(包括硬件和软件)接入仿真回路进行闭路动态试验。小行星撞击器自主导航与控制系统不同于一般的地面设备,必须在特定条件下才能实现闭路运行,并显示其性能指标。因此有必要搭建自主导航与控制技术仿真平台,模拟撞击器在轨道上的各种运行状态,达到验证所设计的控制系统方案,检验系统实际性能的目的。
4.1 仿真平台系统功能与构成
自主导航与控制系统半物理仿真比数学仿真具有更高的置信度,是撞击器自主导航与控制系统研制的重要环节。当自主导航与控制系统研制出来以后,设计人员最关心的问题是其功能和性能是否与设计要求相一致,这只有通过对实际系统进行试验才能确定。所集成的技术仿真平台作为小行星探测自主导航与控制系统半物理仿真实验的载体,期望通过该平台可实现对系统方案、关键技术、控制方法、硬件接口等性能的分析,完成对总体系统的验证和系统参数的优化。本仿真平台的主要功能:验证撞击器自主导航与控制系统方案、测试撞击器自主导航与控制系统的实际性能、对自主导航与控制系统新技术新方法快速验证、通过半物理仿真对实际系统进一步优化设计发现导航与控制系统设计过程中未能暴露的问题。
整个仿真平台由嵌入式自主导航与控制处理系统、远程暗弱目标导航相机、动态小行星目标光学模拟器、撞击器动力学仿真器和导航敏感器/执行器仿真器和三维立体演示部分组成,构建一个闭环的小行星撞击自主导航与控制技术仿真平台系统。小行星撞击自主导航与控制技术仿真平台系统如图6所示。技术仿真平台各部分的构成为嵌入式自主导航与控制处理系统、远程暗弱目标导航相机、动态小行星目标光学模拟器、撞击器动力学仿真器、导航敏感器/执行器仿真器、三维立体演示部分。
4.2 自主导航与制导控制试验结果
目标模拟器可根据撞击器相对于目标天体位姿,考虑光照、阴影、亮度等因素将目标天体的模拟图像以平行光的形式输出。导航相机通过拍摄目标模拟器生成图像,并进行自主的光学处理,提取相应目标小行星光心坐标和撞击目标点,光学导航方法对小行星光心坐标的提取精度要求较高,自主光学信息处理技术是自主导航与控制的关键技术。光学信息处理算法提取的光心信息和选取的撞击点图片如图7所示,其中红色十字为天体亮心,蓝色方框为选取的撞击点,第7幅图像为撞击前20 min,开始实验性的进行撞击点选取,最后一幅图像为撞击前12 min的光心提取和撞击点选取情况。图像处理算法提供的相应目标天体光心坐标见表1。
表1 图像处理结果Table 1 Image processing result
图7 图像处理提取的测量信息Fig.7 Measurement information extracted by image processing
在半实物仿真中,撞击器在采用光学导航相机跟踪目标天体光心后,利用Kalman滤波算法确定撞击器在B平面坐标系下的位置。制导算法采用预测制导律,将计算得到的预测撞击点与期望目标点进行比较,利用其偏差产生控制信号,在保证燃耗和撞击器指向满足要求的条件下,施加机动速度,改变撞击器轨迹,达到消除撞击点偏差的目的,相关仿真参数如表2所示。

表2 综合仿真参数Table 2 Patameters of integration simulation
撞击器分别在1 200、4 100、6 450、6 780 s处进行了4次轨道机动,结果如图8所示,由分析可知第1次机动是在进行轨道确定提高导航精度后,撞击器实施的主要机动,第3次机动是场景分析后撞击器为到达新选定目标点而进行的机动,第2次和第4次机动则是对前2次机动施加的修正。4次轨道机动共消耗燃料7.6 m/s,最终撞击目标点坐标为(34.2,68.9)m,脱靶量为76.9 m,其开关次数少、脱靶量较低,说明所设计的自主导航与制导控制系统能够满足撞击任务的需求。由于姿态制导考虑了机动的方向约束,在整个机动过程中,只有Z轴方向上执行了姿态机动,保证了姿态机动的快速可靠且节省燃料。

图8 接近交会段半实物仿真结果Fig.8 Simulation results of approaching and encountering phase
为更精确、完备地测试各算法及星载导航制导软件的性能,应用表2的仿真条件,对小天体撞击自主导航与控制系统进行了多次仿真试验。300次仿真的撞击误差分布如图9所示,可见最终撞击最大误差在200 m以内。且通过对以上仿真初始条件得到的撞击点分布的分析,可以看出最终撞击点的分布与撞击器的初始位置与速度无关,这是因为导航系统能利用光学导航将初始导航误差消除,制导系统利用导航信息可以将撞击偏差消除,所以撞击器的初始状态对撞击精度影响不大,影响最终撞击精度的因素主要是最后一次机动时刻,导航精度以及点火执行的控制精度。
图9 撞击误差分布图Fig.9 impact points distributing map
5 结 论
本文分析研究了小行星撞击探测自主导航与制导控制系统的工作模式,针对撞击任务自主性和实时性的需要,给出一种自主光学导航算法,该算法利用导航相机提供的目标天体光心信息,对撞击器的位置、速度状态进行估计,并基于预测制导思想对轨道修正制导律进行设计。研制了自主规划与导航原理样机,并搭建了小行星撞击探测自主导航与制导控制综合试验系统,开展了小行星撞击自主导航与制导控制地面半物理仿真试验,对所提出的方案及方法的性能进行了仿真试验。
猜你喜欢
军事文摘(2022年24期)2023-01-05
今日农业(2022年2期)2022-11-16
太空探索(2020年10期)2020-10-22
百科探秘·航空航天(2019年4期)2019-06-11
百科探秘·航空航天(2019年5期)2019-06-06
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
太空探索(2016年1期)2016-07-12
北京航空航天大学学报(2016年4期)2016-02-27
发明与创新(2015年30期)2015-02-27