基于日地L1点近地小行星天基观测系统的天地协同观测效能分析
2023-10-25 10:11冯思亮喻志桐胡馨然田坤黉宋政吉尚海滨刘志敏
深空探测学报 2023年4期
冯思亮,喻志桐,胡馨然,田坤黉,李 彬,杜 菲,宋政吉,尚海滨,刘志敏
(1.北京空间飞行器总体设计部,北京 100094;2.北京理工大学 宇航学院,北京 100081;3.中国科学院 紫金山天文台,南京 210023;4.北京空间机电研究所,北京 100094)
引 言
近地小行星(Near Earth Asteroid,NEA)指近日点半径小于1.3 AU的小行星,其有机会进入地球轨道4 500万km之内,存在撞击地球的风险。提前发现并预警小行星是防范化解近地小行星撞击风险的前提条件,因此开展近地小行星监测预警尤为重要。
截至2023年2月28日统计①近地天体研究中心(CNEOS)网站https://cneos.jpl.nasa.gov/。,人类已经发现了31 361颗近地小行星,其中直径超过140 m的有10 400颗,超过1 km的有853颗。目前,地基光学系统是搜索发现小行星的主力装备,搜索发现了超98%的已编目小行星。但地基望远镜易受大气、天气等因素影响,只能在晴朗的夜晚进行观测,导致其观测时间短,且无法对来自太阳方向的小行星进行预警。
天基系统不受大气影响,具备全天时、全天候的优势,通过优化观测手段和轨位等,可有效弥补地基系统的固有监测盲区,是未来重要的发展方向[1]。日地拉格朗日L1点(简称日地 L1点),位于日地连线距离地球150 × 104km处,是太阳–地球的引力平动点。在日地L1点部署天基观测望远镜,具有器–地–日位置关系相对固定等特点,是开展近地小行星监测预警任务的理想观测点位之一[2]。美国提出的近地天体勘测者太空望远镜(NEO Surveyor)计划于2028 年发射到日地L1点,目标在5 年时间完成编目超过2/3的直径140 m级近地小行星[3]。
为充分发挥天基和地基的观测优势,利用不同轨位与站址的天基、地基望远镜进行组网协同观测,一方面可有效提升系统的观测效能,是开展高效联合监测作业的基础;另一方面,通过时间和空间协同的接力观测可提高系统的预警能力,并且针对迫近小行星探索值守预警新模式。整体来说开展天地协同观测具有重要意义。
中国提出未来将建设天地一体化协同监测预警体系,其中构建“可视天区互补、分时协同编目、短临发现告警、广域巡天普查”的天基监测网,具有与地基监测网高效联合作业能力[4]。目前已开展了天地协同观测的相关研究,但针对效能评估的研究总体来说仍处于起步阶段,尚未形成系统的效能评估方法和工具手段。
本文结合光度和信噪比计算构建了近地小行星观测模型,在日地L1点轨道观测条件分析基础上设计并提出了观测系统方案;进一步围绕观测和预警效能,从极限观测距离、编目完备率、预警时间、相对预警天区、预警可用性等方面提出了系统效能评估方法;最后仿真分析了日地L1点轨道的可见光、红外观测系统,以及与地基系统开展协同观测时的效能,计算分析了日地L1点观测系统的预警效能并提出了协同预警的设计构想。
1 近地小行星观测模型
1.1 光度模型
视星等指观测者看到或者通过电荷耦合器件(Charge-Coupled Device,CCD)得到的星体亮度,主要由小行星绝对星等、小行星与望远镜的距离和两者之间的相位关系决定,太阳、望远镜和小行星之间的相位如图1所示。
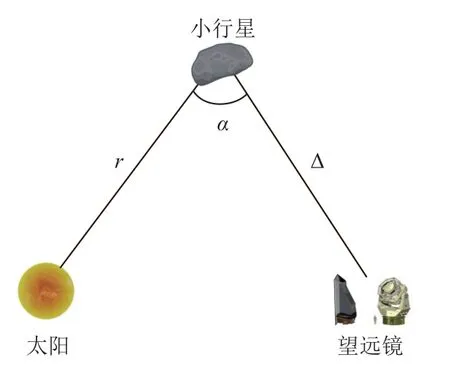
图1 太阳、望远镜和小行星之间的相位关系Fig.1 Phase relationship among the sun,telescope and asteroid
视星等模型选用较为简单且广泛使用的双参数(H,G)星等模型,即
其中:V为小行星的视星等;H为小行星的绝对星等;Φ1、Φ2为相位函数;r和 ∆分别为小行星的日心距和地心距,单位为AU;α为太阳–小行星–望远镜三者形成的夹角为太阳相位角,单位为rad;G为斜率参数,与光被小行星表面上的粒子散射的方式有关,取假设值为0.15[5]。利用上述模型即可计算不同方位和距离,可观测到的近地小行星直径与视星等的关系。
太阳系中小行星的绝对星等是在日心距、地心距为1 AU,且太阳相位角为0°时的归算星等,由小行星的直径和反照率决定为
其中:D为小行星直径;H为绝对星等;pv为反照率,文中取pv=0.15[6]。
1.2 信噪比计算模型
可见光和红外观测技术是近地小行星天基观测系统最主要的方法。信噪比是决定目标能否被成功识别的一个重要因素[7],其含义为望远镜接收到的目标信号与噪声信号的比值。
1.2.1 可见光系统信号和噪声
对可见光系统,望远镜接收到的信号为
其中:Aeff为望远镜有效口径;qe为量子效率;τoptics为光学透过率;η为像元能量集中度;Ne为目标在入瞳处的光子流量
其中:N0为0等太阳光谱恒星带内的光子流量,取5.79×1010ph/s/m2[8];Vm为近地小行星的视星等,可通过式(1)计算得到。
CCD 传感器在对空间目标探测时,噪声主要来源有探测背景噪声、光子噪声、探测器固有噪声等。探测器包括暗电流和读出固有噪声,这些噪声数据可根据CCD探测器产品手册上提供的参数得到。探测背景噪声主要是星空辐射为主的深空背景。对于可见光谱段,主要背景为黄道尘埃散射的太阳光辐射,取值为22 Mv/角秒方[9]。
1.2.2 红外系统信号和噪声
红外系统的信号计算公式在入瞳处的光子流量Ne与可见光系统不同,Ne为
其中:ε为近地小行星目标的发射率,取0.8[10];L(λ,T)为普朗克公式计算的目标光谱辐亮度;T取典型值300 K,积分后即为宽带辐射亮度;Ar为小行星面积;dr·o为望远镜与小行星之间的距离;/hc为光子能力的倒数。
红外视场主要由深空辐射造成的深空背景和进入红外相机的散杂光组成。本文主要考虑探测背景噪声,对于红外光谱段,主要背景为黄道尘埃的自身辐射NZ,计算方式为
Ω的计算公式为
其中:F为望远镜的焦距。
Zod的计算公式为Bλ(T)ZF
其中:为温度T时的普朗克公式;由视轴与黄轴的位置决定,巡天模式时对大部分天区进行观测,参考詹姆斯·韦布空间望远镜(James Webb Space Telescope,JWST)取1.2[11]。
1.2.3 系统信噪比
根据上述可见光和红外观测系统的信号和噪声模型,分别代入望远镜接收到的目标信号和噪声信号即可得到对应系统的信噪比(Signal to Noise Ratio,SNR)模型
其中:RSNR为信噪比;NT为望远镜接收到的物体信号;NZ为望远镜接收到的黄道背景光信号;σD为望远镜的暗电流噪声信号;σR为望远镜的读出噪声信号。对于天基可见光和红外观测,为实现空间目标的有效探测,系统的信噪比应满足信噪比阈值判据,本文选取阈值参考值为5[12]。
2 日地L1点轨道观测系统方案
2.1 天基监测有利观测条件分析
在日地L1点部署望远镜开展小行星天基观测,在观测区域、时间、手段等方面相比于地基望远镜,具有一定的优势。
1)观测区域,可接近全天区观测。考虑必要的太阳抑制角影响,在日地L1点部署光学望远镜如考虑覆盖地基观测部分,其极限可视天区(约35 211.6平方度)超过全天球(41 252.96平方度)的85%,并对来自太阳方向的小行星监测以及提前预警具有得天独厚的优势。
2)观测时间,可实现全天时观测。由于不受昼夜影响,可连续24 h开展全天时的巡天观测,能够对特定目标进行较长时间的连续跟踪观测;
3)观测手段,可完善全谱段观测。由于没有大气散射等影响,在可见光谱段基础上,可进一步选择部署运行红外望远镜,获取小行星的尺寸、反射率、热物理等详细特性信息,完善小行星观测手段。
2.2 日地L1点观测系统优势分析
日地L1点天基观测系统是开展首次监测预警试验的优势方案之一,主要体现在以下几个方面。
1)工程实现性较好。日地L1点测控距离较短,信号空间损失基本不受影响,同时热流密度变化较小,便于热控设计,同时可充分继承“嫦娥五号”工程日地L1点拓展任务实施经验,总体来说工程实现性较好。
2)相对位置稳定。日地L1点与地球、太阳三者位置相对稳定,有利于红外空间望远镜工程实施,对太阳一侧采用遮阳屏遮挡太阳辐射,能够实现望远镜被动制冷,便于开展固定点位值守;同时开展天地联合观测时的基线比较稳定,便于与地基设备统筹规划天区扫描策略,能够与地基观测天区范围、发现目标类型形成互补,大幅提高巡天效能。
3)轨道C3能量小。由于日地L1点离地球相对位置较近,在拓展应用时候可以便捷实现拓展至环地的远距大幅逆行轨道(Distant Retrograde Orbit,DRO)、地球领航/拖尾等其它轨道试验。
2.3 可视天区与扫描策略
近地小行星可见性受到望远镜视场的约束,设计望远镜的瞬时观测视场为矩形,望远镜瞬时观测视场如图2所示。每个瞬时观测视场即是一个观测扫描基本单位,通过设置观测时间、扫描方向,便可确定扫描策略。根据基本单位对望远镜的可视天区进行划分,设计每个单位之间的扫描顺序,以实现对整个可视天区的扫描。由于日地L1点位于地球轨道内侧,天基望远镜瞬时观测设计为视场中心沿地球轨道指向两侧(黄纬为0°~360°,黄经为45°~135°),视场为9平方度(3° ×3°),视场内停留时长为60 s(观测积分时间40 s,调姿20 s),系统观测与扫描方式如图3所示。望远镜将采用此种扫描方式,在可视天区上可与地基背对太阳观测方向形成互补,以便开展分区域、分时域的天地协同监测预警。
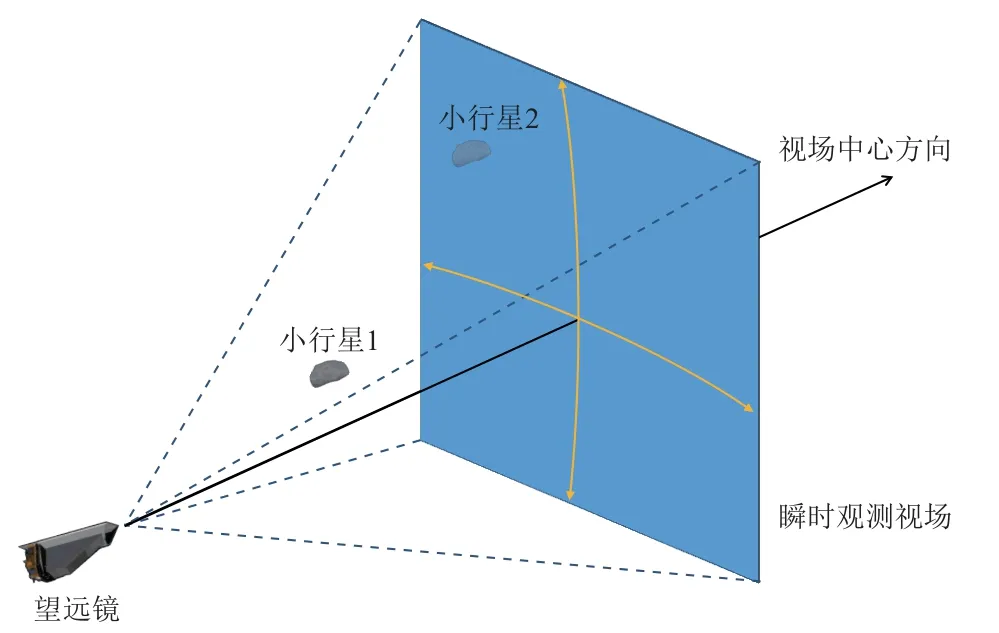
图2 望远镜的瞬时观测视场Fig.2 Instantaneous observation field of view of a telescope
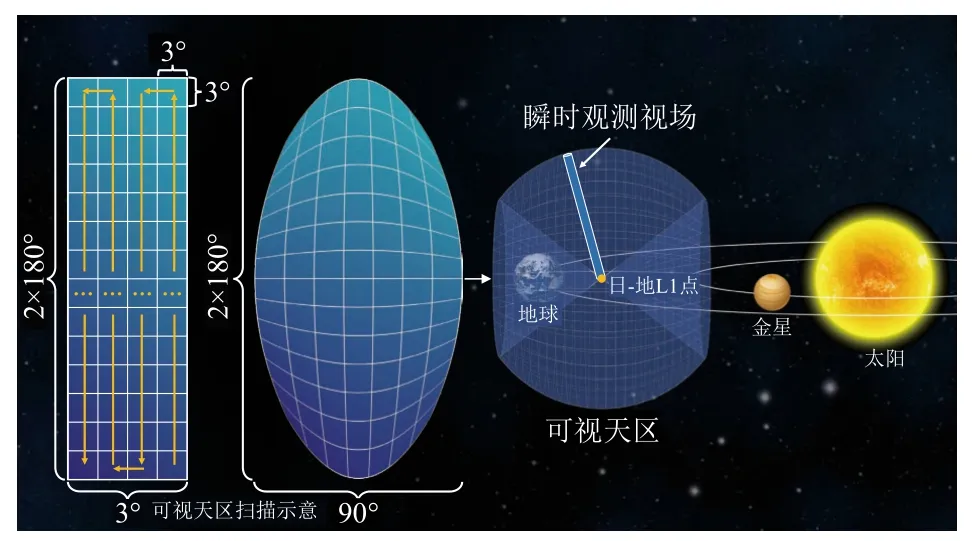
图3 日地L1点系统观测与扫描方式示意图Fig.3 Schematic diagram of observation and scanning methods for solar terrestrial L1 point system
以此为基础,在地心天球坐标系利用望远镜对天区(赤经0°~360°,赤纬–45°~90°)进行扫描观测,望远镜的视场为9平方度(3° × 3°),视场内停留时长210 s。望远镜将在夜晚进行观测,并保证视线高于水平面一定角度。
3 效能评估方法
3.1 观测效能评估方法
3.1.1 极限观测距离
以地球为中心,利用信噪比阈值计算不同光学系统望远镜对地球周围不同等效直径小行星的极限观测距离。
3.1.2 编目完备率
以观测系统的系统信噪比为参考,利用视场和信噪比可见性等约束,通过计算仿真观测期间,系统有效编目的小行星数量在数据库中的总数占比即编目完备率,其中设置间隔15 min~2 h内到同一个目标进行4次视场内扫描可形成一个观测轨迹,在此基础上间隔1~30 d形成4次观测轨迹为有效编目的统计依据。天基和地基系统计算仿真库中小行星的可见性流程如图4所示,其中地基系统的流程略微复杂,还需要在计算特定时刻几何关系上特别考虑太阳位置矢量等因素。
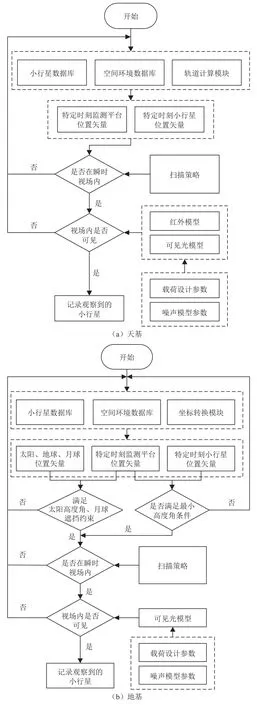
图4 天、地基系统观测仿真流程Fig.4 Observation and simulation process of sky and ground systems
3.2 预警效能评估方法
在小行星接近地球的过程中,根据其与地球的距离,主要将观测系统的任务场景划分3个:当小行星距离较远时望远镜以发现编目场景为主,当其飞行至距离地球较近时将转换至威胁预警场景,倘若小行星进一步接近地球并进入地球一定距离内(本文设置预警距离为1 000万km)将转换为短临预报场景。
3.2.1 预警时间
计算望远镜对小行星进入预警距离时开始,到这颗小行星撞击地球结束的长度为预警时间,其中参考国际成功预警的小行星撞击事件,保守按照20 km/s估算小行星接近地球的相对运行速度。
3.2.2 相对预警天区
针对预警模式,预警过程对于小行星的有效观测次数与编目依据不同,其在最少2次视场内扫描观测到小行星形成观测轨迹外,还需完成观测天区的一次重访(形成2次观测轨迹)以精确定轨。计算望远镜系统在其自身规划的扫描策略下(2次视场内扫描),在预警时间内能够完成一次重访的天区大小为相对预警天区。
3.2.3 预警可用性
不同天基和地基望远镜在观测的时间和区域上也各有侧重,预警可用性主要计算望远镜系统的可用观测时间和区域,用以表征预警效能。
4 效能仿真分析
4.1 仿真参数
统一假设望远镜入轨日期为2021-01-01,运行寿命1年,以MPC中获取的2 072颗危地小行星的星历和绝对星等为数据库,库中小行星直径的分布范围为0.136~5.668 km,整体占比如图5所示,在进行仿真计算时,设置小行星的反照率为0.15,温度为300 K,根据图4的仿真流程对小行星监测进行模拟仿真。
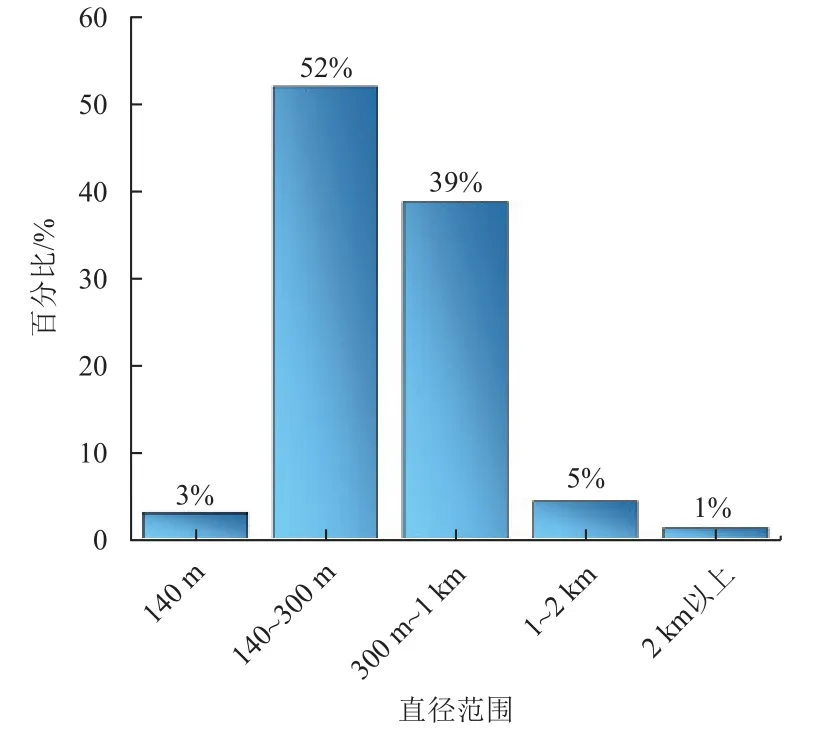
图5 危地小行星数据库直径分布占比Fig.5 Proportion of diameter distribution in the database of hazardous asteroids
这些高危小行星的轨道参数分布,其半长轴与轨道倾角、偏心率的分布如图6所示。可以看到高危小行星主要类别为Atens和Apollos类型,即这些高危近地小行星轨道会穿越地球轨道。
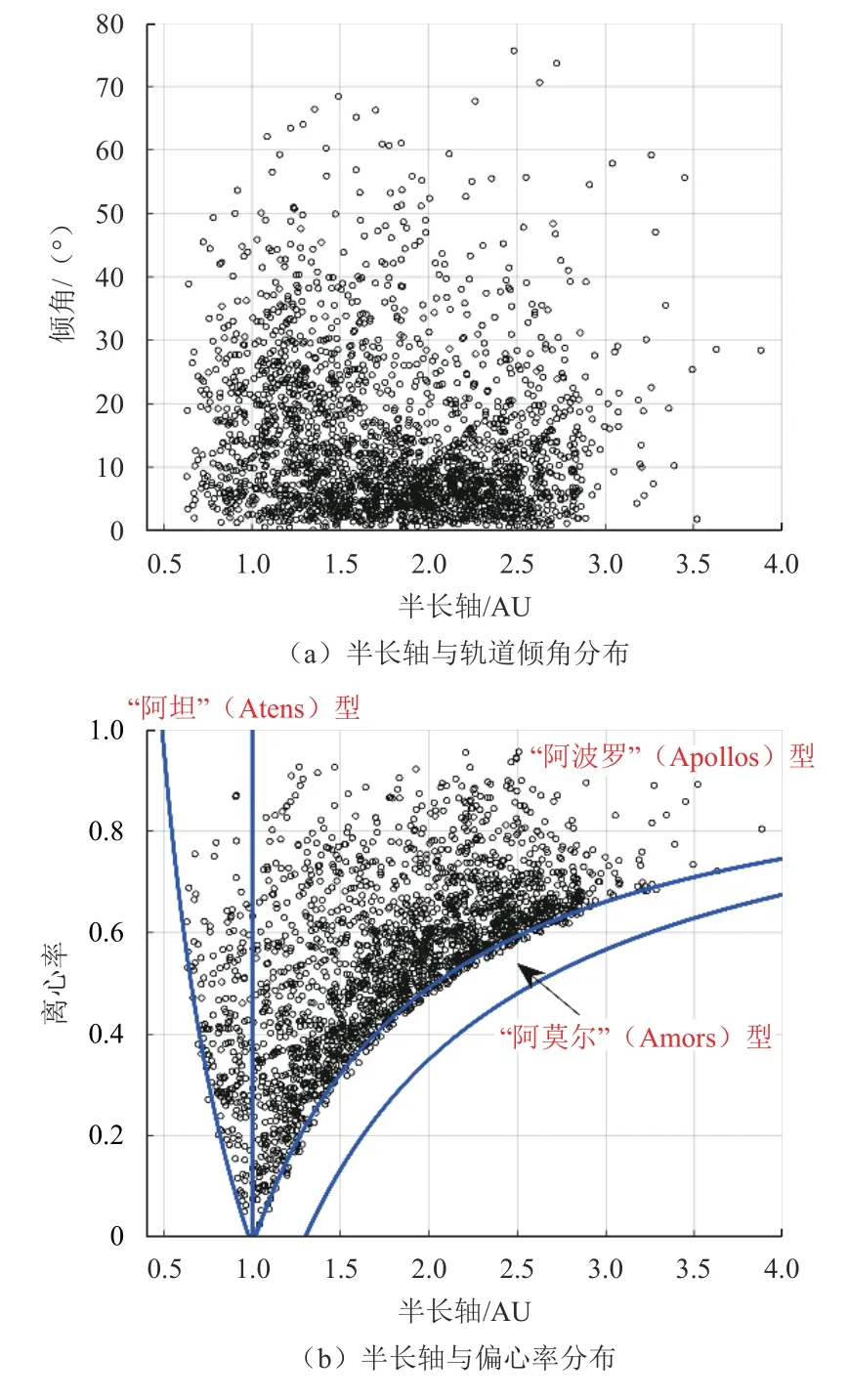
图6 危地小行星轨道分布Fig.6 Orbital distribution of hazardous asteroids
仿真运行于日地L1点法向幅值为10万 km的Halo轨道可见光、红外系统望远镜的效能,并加入一台地基观测站仿真天地协同观测时的效能,仿真时望远镜性能参数如表1所示。

表1 望远镜性能参数Table 1 Telescope performance parameters
4.2 观测效能评估
4.2.1 极限观测距离
由于日地L1点在太阳系尺度距离地球较近,在计算信噪比阈值为5的极限观测距离时,天基与地基可见光系统的结果较为接近。本文重点针对分别部署于日地L1点的红外和可见光望远镜的极限观测距离进行对比,结果如图7所示,其中白色区域是望远镜对太阳的规避角(90°)。根据仿真结果可以看出,相比于可见光观测系统,红外观测系统对于直径为140 m的小行星具有更远的观测距离。

图7 系统极限观测距离对比Fig.7 Comparison of system limit observation distances
4.2.2 编目完备率
本文分别计算仿真了日地L1点可见光、红外观测系统与地基观测站的编目完备率,并针对协同后的系统整体编目完备率进行了对比,结果如图8所示。根据仿真结果可以看出,绿色平面内日地L1点红外和可见光系统编目完备率分别为49.4%和38.2%,说明部署于日地L1点2种光学系统均能较好地针对危地小行星开展观测,并且在相同口径下红外系统的观测效率优于可见光系统。进一步通过观察橙色和蓝色平面内的曲线,可以看出红外与可见光观测系统分别与地基观测站协同观测后,系统整体的效能均有明显提升,其中红外系统协同观测后编目完备率为58.9%,为协同前的1.19倍;可见光系统协同观测后编目完备率为50.6%,为协同前的1.35倍。
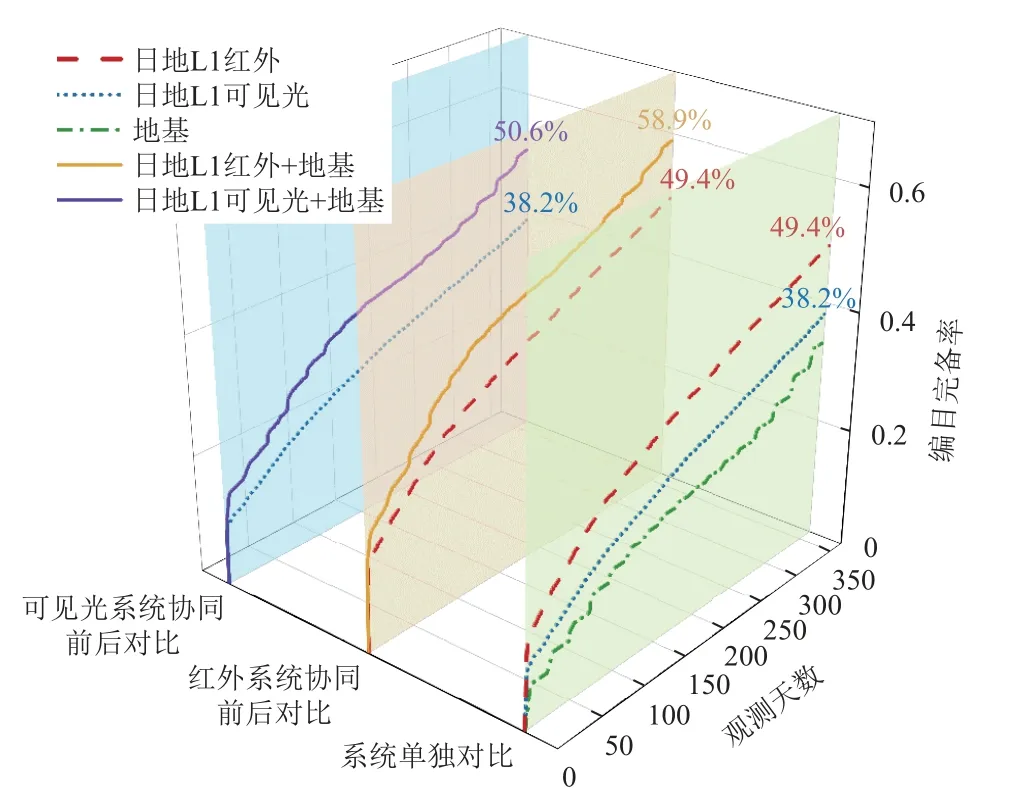
图8 系统编目完备率曲线对比Fig.8 Comparison of system cataloging completion rate curves
4.3 预警效能评估
4.3.1 预警时间
设置日地L1点光学系统绝对星等为22时,则系统观测能力为50 m级小行星@5 357万km。针对1 000万km预警距离,以小行星20 km/s的保守相对运行速度计算,日地L1点光学系统可提前5.787 d对直径50 m以上的迫近小行星实现预警,因此可提供大于5 d的预警时间,可为专兼用设备对目标小行星开展加密跟踪、预报撞击区域等信息提供相对充足的时间支持。
为充分发挥效能,设计面向威胁预警场景的系统封边监测预警模式,从而扩大预警时间要求内可值守的天区。封边监测预警模式设定一个球壳区域,设置距离地球1 000万km为封边探测内边界,1 864万km为外边界(864万km为5 d时间20 km/s小行星运行距离)。当小行星穿越球壳被重访发现时,即可实现1 000万km外预警,封边监测预警模式示意图如图9所示。此外,若将预警距离拓展至球壳外边界,计算L1点观测系统在5 d预警时间内,可预警目标的最大相对运行速度将增至43 km/s。
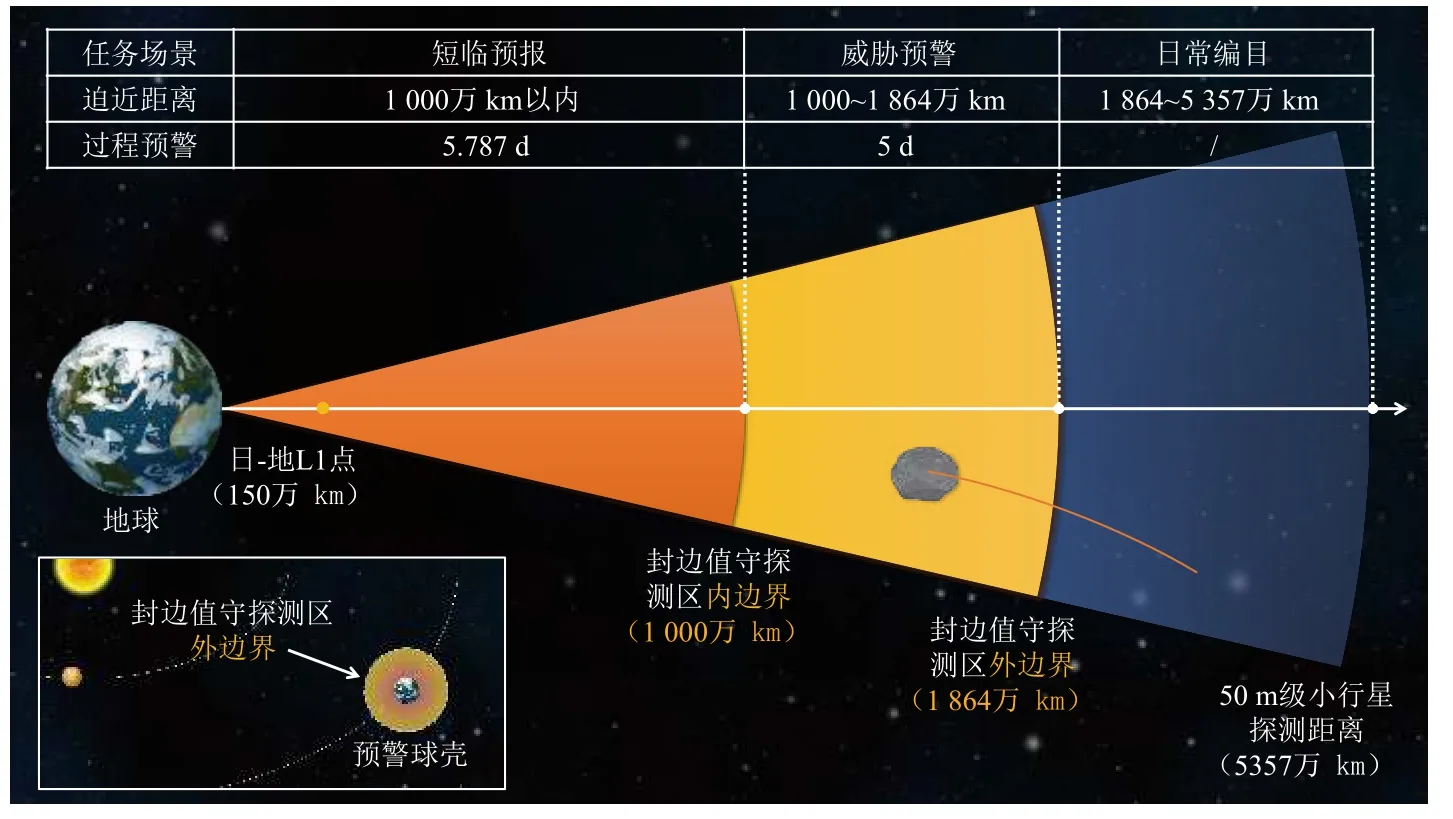
图9 封边监测预警模式示意图Fig.9 Schematic diagram of edge monitoring and warning mode
4.3.2 相对预警天区
根据望远镜自身所规划的扫描策略,计算5.787 d预警时间内实现2次视场内扫描的相对预警天区大约为18 750平方度(其中瞬时视场9平方度,停留时长为60 s)。
卡特琳娜巡天系统(Catalina Sky Survey)根据其自身扫描策略每晚约能观测1 000平方度(其视场为5平方度,积分时间30~60 s,形成完整的轨线需要3次扫描)。
针对预警任务将两个观测系统进行对比,如果都按照5.787 d的预警时间估算,日地L1点观测系统在一定预警时间可扫描实现较大天区预警,具有一定优势。
4.3.3 预警可用性
预警时间可用性方面,天基观测系统不受大气等影响,可用观测时间基本可按24 h计算,同时日地L1点观测系统部署于稳定的太阳平动点,因此开展预警任务的工作时间可连续不间断,相较于环绕日地组网巡视望远镜来说具有一定优势;
预警空间可用性方面,计算望远镜极限可视天区的球面度约为29 170平方度,约占4 π全天球的70.7%。此外,日地L1点望远镜通过调相即可兼顾地球轨道前后的预警空间,相较于地球公转轨道固定值守点位望远镜来说具有一定优势。
进一步考虑天地协同观测后提升系统的观测和预警效能,提出了协同观测的设计构想,平面示意如图10所示。在日常巡天监测编目时,日地L1点部署光学望远镜可与地基设备开展区域分工协同观测,由地基设备负责观测相位角±(135°~180°)天区,天基则将太阳一侧天区作为优势监测天区进行观测,主要负责±(45°~135°)天区,以此确保可监测预警太阳方向来袭的小行星,并且具备协同接力监测预警小行星的能力;对于同一天区开展应急监测或威胁预警等时,可与地基设备开展时域分工协同观测,由地基设备在日落后至次日日出前的约20点至次日凌晨4点时间段进行观测,由天基设备于4—20点进行观测。

图10 日地L1点轨道望远镜协同观测平面示意图Fig.10 Schematic diagram of collaborative observation plane of L1 point orbit telescope between the Sun and Earth
5 结 论
本文通过构建近地小行星观测模型,基于日地L1点轨道设计提出了天基观测系统方案,结合所提出的效能评估方法,对小行星的天地协同观测效能进行评估研究,对危地小行星库开展了仿真分析,由日地L1点红外、可见光观测系统的极限观测距离对比可知,红外观测系统具有更远的观测距离。通过对比加入地基观测站协同前后的系统编目完备率,发现红外系统的编目完备率由49.4%提升至58.9%,可见光系统的编目完备率由38.2%提升至50.6%,分别是协同前的1.19倍和1.35倍,说明协同观测能够有效提升系统的观测效能。计算系统的预警时间和相对预警天区为5.787 d和18 750平方度,可较好满足预警任务需求。通过设计封边监测预警模式,使得系统可在1 000万 km外实现迫近小行星发现告警。进一步从预警可用性层面分析设计了区域和时域分工的设计构想,有望进一步提升系统的观测和预警效能。
本文所提出的效能评估方法可适用于其它不同轨位的天基观测系统,为后续监测预警体系的系统性发展提供参考。但是,考虑计算资源限制和模型选取等因素,对红外、可见光观测系统的信噪比模型以及天基和地基观测系统的扫描策略都进行了大量简化,仿真结果与实际观测必然存在一定差异。下一步可从上述2个方面细化完善观测模型和策略,同时通过增加仿真观测时间或开展大样本模拟数据仿真提升评估的可信度,为进一步提升效能提供更多参考。
猜你喜欢
军事文摘(2022年24期)2023-01-05
今日农业(2022年2期)2022-11-16
国际太空(2022年1期)2022-03-09
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
空间科学学报(2021年2期)2021-07-21
航天电子对抗(2019年4期)2019-06-02
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
小哥白尼(趣味科学)(2018年6期)2018-09-14
摄影之友(影像视觉)(2017年12期)2017-02-08
太空探索(2016年1期)2016-07-12