
基于智能运维技术的冶金设备状态监测应用研究
2023-10-25 13:33姜波
冶金动力 2023年5期
姜 波
(马鞍山钢铁股份有限公司,安徽马鞍山 243000)
1 概述
传统设备管理通常依赖于定期巡检和维护,无法实时获取设备的运行数据。缺乏实时监测和数据分析能力导致无法第一时间发现潜在问题,增加了设备故障和停机的风险。
定期维修是按照到期必修的要求进行的,忽略了设备制造质量的差异以及设备的实际运行条件和状态,可能造成设备的过度维修或维修不足。过度维修可能导致新的隐患,在过度维修过程中,由于维修者技术不佳、工艺不良或管理不善,频繁的拆装会导致新的隐患。
采用智能运维技术,可以将维修管理从预防性维修转变为预知性维修,运用在线检测手段及时发现隐藏的故障信息,并做出正确的维修决策,这已成为国内外设备管理发展趋势。
2 智能运维技术
2.1 智能运维技术的基本概念
智能运维是一种利用人工智能和数据分析来提升设备维护效率和可靠性的技术。传统的设备维护通常是要依靠人工判断来处理各种故障和异常情况,而智能运维则通过自动化和智能化的手段来实现设备维护策略的优化和效率提升。
智能运维技术是通过实时监控和数据分析来预测和诊断故障,提前采取措施防止故障的发生或减少故障带来的影响。同时,智能运维还可以利用机器学习和深度学习等技术,对大量的设备状态数据进行分析和挖掘,从中发现潜在的问题和优化空间,提供更好的决策支持和运维策略。智能运维的优势在于提高了设备维护效率和可靠性,降低了维护成本和风险,能够实时监控和分析运行状态,及时发现和响应问题,缩短故障处理时间,提高系统的稳定性和可靠性。
2.2 智能运维技术的发展与应用现状
设备智能运维技术大体有三个发展阶段。
初级辅助运维。从人力运维向智能运维过渡的初始阶段,也是多数制造企业所处的阶段。此时的企业逐渐建立起监控工具,通过流程可溯源、规范化记录、工具辅助告警等,改变原有的全盘依赖人工经验、事后维护的被动性。但该阶段依然缺乏对数据的充分利用,离散化的工具难以进一步提高工作效率。
数据融合运维。该阶段最明显的标志之一,就是预知性维护。企业以平台形式对产线和设备进行可视、可控的集中管理。在这个阶段中,以故障分类、模式识别、智能化专家系统及其计算(故障树计算、神经网络计算)等为基础,使企业获得的信息更透明、更准确、更及时。
完全智能运维。这个阶段以优化控制、经济运行、寿命管理、系统工程等为内容,以设备全过程经济管理为技术目标,也是最理想的运维状态,系统可对数据进行自主分析,自动做出决策,并自动执行。
2.3 智能运维技术在冶金行业中的应用前景
智能运维技术可以利用传感器和监测系统对冶金设备进行实时监测,收集各种关键参数和数据指标,如温度、压力、振动等。借助先进的数据分析和机器学习算法,可以预测潜在的故障和异常情况。通过及时发现和警示,可以防止设备故障和非计划停机时间的增加,从而提高生产效率。
智能运维技术还可以帮助优化设备的维护计划和策略。传统的预防性维护通常是基于时间或使用寿命来安排的,往往效率较低。而智能运维技术可以根据实时设备状态和运行数据,准确确定设备的维护时机和方式,避免不必要的维护和停机。
智能运维技术可以通过对设备的数据分析,实现冶金生产过程中的资源优化和能耗管理。通过实时监测和分析设备的运行数据,可以识别出能源消耗较高的设备,提供节能改进建议,优化能源使用效率,降低生产成本。
智能运维技术可以实现对冶金设备的远程监控和维护,减少人员在现场的工作量和风险。通过远程传感器和监控系统,运维人员可以随时监测和控制设备的运行状态,并进行远程故障诊断和维修,提高运维效率和响应速度。[1]
3 基于智能运维技术的冶金设备状态监测应用研究
3.1 数据采集与处理
选择适合具体设备的传感器进行数据采集,如温度、压力、振动、电流等传感器。确定数据采集的频率,根据设备的运行情况和数据变化速度来决定采集频率。
对底层数据进行清洗、过滤和标准化,去除异常数据和噪音,保证数据的质量和一致性。对采集到的数据进行分类汇总和格式转换,以适应后续的数据分析需求。
采用合适的通信协议和技术,将底层设备采集到的实时数据传输至上层的数据处理和分析系统,以实现实时监测和预测。选择合适的数据存储方案,用于存储采集到的底层设备数据。
建立设备数据的管理体系,包括数据分类、命名规范、数据权限控制等,以确保数据的安全和可追溯性。
3.2 设备状态评估与故障预警
从采集到的数据中提取有代表性的特征,用于描述设备的运行状态和特征,通过特征工程的方法进行降维或特征选择,以减少计算复杂性。
基于历史数据和监测数据建立设备状态评估模型,使用建立的状态评估模型对设备实时数据进行预测和分析,判断设备是否存在异常。当模型预测或检测到设备状态异常或故障风险时,生成故障预警信号或事件,及时通知相关人员进行处理。
根据故障预警信号或事件,对设备进行维修和优化,减少故障的影响和停机时间。通过持续的监测和状态评估,进一步优化设备维护计划和运行策略,提高设备的可靠性和生产效率。
3.3 不同场景下的智能算法
3.3.1 阈值分析
在冶金设备状态监测中,阈值分析是非常重要的一步,可以帮助我们确定设备状态的正常范围并根据预设的阈值来判断是否存在异常情况。根据设备的特性和运行要求,设定适当的阈值。阈值可以是固定的,也可以基于历史数据或标准进行设置。将采集到的数据与设定的阈值进行比较,判断是否存在异常情况。持续监测设备状态,可以根据实际情况调整阈值,提高监测的准确性和敏感性。设备状态监测阈值的设置应根据具体的设备和工艺特点进行优化,并结合运维经验和相关标准进行判断。
3.3.2 趋势分析
在冶金设备状态监测中,趋势分析也是一种重要的方法,用于了解设备状态的演变,帮助预测潜在的故障。使用合适的统计或数学方法来分析数据的趋势,常见的方法包括回归分析、时间序列分析、平滑方法等。利用趋势分析的结果,预测设备状态的未来发展趋势,将趋势分析的结果与设备故障模式进行比对,帮助进行故障诊断和分析,准确定位设备问题,制定相应的设备维护策略。设备状态监测趋势分析应综合考虑设备的特性、历史数据和运行环境等因素。
3.3.3 模型分析
以下介绍3 种对通用旋转设备的模型诊断方法。
3.3.3.1 时域波形分析法
时域波形分析是一种对旋转机械振动信号进行分析和评估的方法,通过对振动信号的振幅大小、形状和变化特性进行观察和分析,以反映机械状态和故障特征。时域波形分析可以直接从振动信号的时间历程中提取特征量,用于状态监测与故障诊断。[2]
常用的时域分析特征包括:
(1)均值:振动信号的均值可以给出整体振动水平的信息,可以反映信号的偏离程度。
(2)标准差:振动信号的标准差反映了振动信号的波动或振动幅度,较大的标准差表示振动信号的波动范围较大。
(3)峰峰值:振动信号的峰峰值是振动信号波形的最大幅值与最小幅值之间的差值,可以反映振动信号的总体振幅变化。
(4)峰值:振动信号的峰值表示信号波形中的最大幅值,可以反映振动信号的最大振幅。
(5)均方根值:振动信号的均方根值是信号幅值的有效值,可以反映振动信号的能量大小。
时域波形分析还可以通过计算峭度、偏度等参数来进一步分析振动信号的波形特征。这些特征值可以通过建立的波形与机械设备运行状态之间的对应关系进行比较和分析,从而实现转子的状态监测和故障诊断。
3.3.3.2 频域分析法
频域分析是对振动信号在频率上的特征进行分析的方法。通过将振动信号在频率和振幅之间的关系进行可视化,可以提供更详细和准确的信息,对于诊断旋转机械的故障非常有用。[2]
常见的频域分析方法包括:
(1)傅里叶变换:将时域信号转换为频域信号,得到信号的频谱图,提供了信号中各个频率成分的幅值和相位信息。
(2)快速傅里叶变换:是傅里叶变换的一种快速计算算法,可以对大量的离散样本进行频谱计算,得到高分辨率的频率谱图。
(3)小波变换:小波变换是一种具有时频局部特性的频域分析方法,可以将信号分解成一系列不同尺度的频带,进而提供信号在不同频率区域上的时域和频域特征。
(4)小波包变换:小波包变换是小波变换的一种扩展形式,进一步将信号分解成更多的频带,提供更详细的频域信息。
(5)基于经验模态分解(EMD)的频域分析:EMD 是一种数据驱动的时频分解方法,将信号分解成一系列固有模态函数(IMF),通过对IMF 的频谱分析,可以提取振动信号中的频率特征。
以上频域分析方法可以通过计算振动信号的频谱图,对信号的频率成分进行分析。通过分析不同频段的信号特征,可以识别和解释可能存在的故障特征。频域分析方法的选择取决于振动信号的性质、故障模式和分辨率要求等。
3.3.3.3 基于神经网络旋转机械故障诊断方法
根据时域或频域选取合适的特征参数。根据故障机理,当故障发生时,相关特征参数会发生较大变化。通过神经网络模块,采用多层的BP网络结构,利用训练样本对网络进行训练。在MATLAB 工具中,可以使用神经网络实现旋转机械的故障诊断。
使用训练好的神经网络进行故障诊断。将新的振动数据输入到网络中,观察网络的输出结果。如果网络输出与期望结果相符,则说明网络能够正确地实现故障诊断。如果输入数据在一定范围内偏离样本知识,网络的输出结果仍然接近样本,则说明网络在故障诊断方面具有一定的可靠性,实施时需根据具体情况做适当调整和改进。神经网络的训练和测试过程可能需要经过多轮迭代和调优,以达到更好的诊断效果和准确性。[3]
3.4 案例研究与结果分析
3.4.1 高炉风口智能运维系统
2022年12月11日,某钢厂高炉33#直吹管部位烧穿喷焰,因风口送风支管发生大面积倒灌,高炉休风14 h 更换34 支直吹管和2 个风口小套,直接经济损失56 万元。2023 年2 月建立了高炉风口智能巡检系统集成方案,是基于红外热成像技术、视觉技术和大数据技术研发的人工智能产品。通过巡检机器人系统,可定期或按需对高炉直吹管、风口、枪包及相关位置的高温区域进行自动巡检。基于红外热成像技术、数据采集技术和计算机数据处理技术,利用设备外表温度变化与设备内部状况的相关性,通过智能分析软件对设备表面温度数据进行实时分析和处理,当发现异常情况时,系统立即自动发出报警。
3.4.2 智能运维系统构成
该系统主要由四舵轮驱动机器人本体、中继站、数据通讯设备、数据处理主机、显示器、交换机、控制主机柜及配套附件等组成,系统构成示意图见图1。机器人包含红外热成像仪、图像采集模块、光源模块、煤气检测模块、声音采集模块、数据存储模块、自动充电装置和位置传感器等。中继站包含数据存储设备、自动充电设备、配电单元和数据通讯设备等。
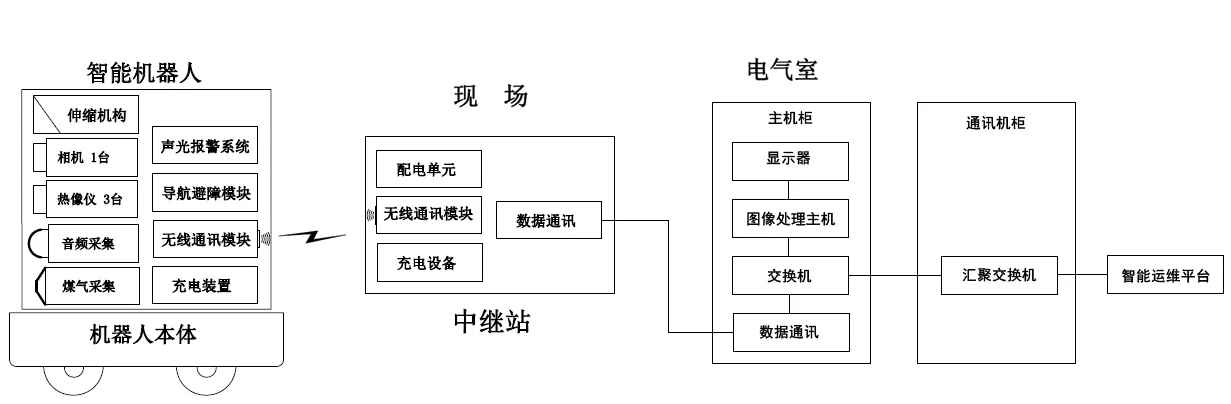
图1 系统构成示意图
高炉直吹管温度自动检测系统示意图见图2。

图2 高炉直吹管温度自动检测系统
智能机器人按照预设轨迹对高炉直吹管风口进行自动巡检,及时掌握风口平台直吹管温度变化趋势、检测煤气泄漏及直吹管烧穿产生的巨大噪音,避免重大恶性事故的发生。
3.4.3 智能运维系统成效
2023年7月24日智能运维系统发现高炉34#风口直吹管前端发红,系统报警信息图见图3。17:24直吹管温度为326 ℃,高温报警,操作人员收到报警后,采取临时措施,适当控风控氧防止事态扩大,停煤枪,炉体架设水管,外部打水冷却后相应位置红外测温180~190 °C,炉内参数逐步恢复正常。停煤拔煤枪后发现34#煤枪距枪头800 mm 处有裂缝,经分析煤枪质量不佳。

图3 系统报警信息
4 结论
通过对基于智能运维技术的冶金设备状态监测应用的研究,可以看出智能运维技术在冶金行业中有广阔应用前景。智能运维技术可以实现对冶金设备状态的准确监测和故障预警,从而提高生产效率和设备可靠性。
智能运维技术在冶金行业中的推广存在一些困难。首先,冶金生产工艺较为复杂,存在多种物理过程,因此设备监测系统需要具有可适应性和稳定性。其次,大规模的数据处理和分析需要高效的计算能力和可靠的数据存储系统。此外,智能运维技术的建设投资较高,对人员技术水平要求较高。
未来,可以进一步探索更先进的传感器技术和数据采集方法,提高数据的准确性和可靠性,还可以研究开发更高效的数据分析和机器学习算法,以提高设备故障的预测准确度,并优化维护计划和策略。
猜你喜欢
科学大众(2023年17期)2023-10-26
天天爱科学(2020年6期)2020-09-10
中国交通信息化(2019年5期)2019-08-30
小学生作文(低年级适用)(2019年5期)2019-07-26
能源(2018年8期)2018-09-21
读友·少年文学(清雅版)(2018年12期)2018-04-04
数学物理学报(2017年6期)2018-01-22
能源(2017年11期)2017-12-13
现代工业经济和信息化(2016年8期)2016-05-17
山东青年(2016年3期)2016-02-28
