
一种全电控挖机的斗杆自适应控制方法
2023-10-25 02:49:20侯轩辉孙晓鹏胡永慧李文慧
汽车电器 2023年10期
侯轩辉, 孙晓鹏, 胡永慧, 李文慧
(潍柴动力股份有限公司电控研究院, 山东 潍坊 261061)
1 挖机行业背景
随着经济迅速发展,建筑业与煤矿业等多种不同行业的层次规模发展到以往难以企及的高度。而挖机作为一种能够挖掘、移料的大型工程机械,广泛出现在以上相关行业的各种施工现场。市场上挖机数量日益增加,竞争日益激烈,如何提高驾驶品质是一个急需解决的重要问题。
斗杆挖掘是挖掘过程中的常见挖掘方式,挖掘停止时往往伴随冲击。迅速操作、突松手柄等操作更易引起泵压的剧烈变化,所以本文针对先导压力变化识别突松手柄工况进行油泵和阀芯的控制,实现降低泵压变化,减小冲击,提高驾驶体验。
2 斗杆自适应方法设计方案
斗杆运动原理:发动机旋转泵将泵油旋转到各个主阀位置,当检测到有关斗杆先导压力增加时,报文信号转换为电信号,推动着相应斗杆阀芯打开关闭。若进行斗杆大腔进油,小腔回油,则实现斗杆挖掘动作;若进行小腔进油,大腔回油则进行斗杆卸料动作。先导压力停止时,斗杆阀芯关闭,泵停止供油,斗杆停止动作。如图1所示。

图1 斗杆自适应方案流程图
2.1 突松手柄工况检测
斗杆运动过程中,手柄变化伴随着先导压力变化。检测先导压力的变化,当先导压力低于设定阈值,且先导压力变化率高于设定阈值时,判断为突松手柄工况的检测。于此特殊工况进行区别于一般手柄工况的特殊处理。
2.2 阀芯开度控制
1) 阀芯电流速度处理:手柄运动的轻重缓急,对应机手不同的驾驶意图,对应阀芯电流也有所不同。斗杆阀芯电流根据原始的斗杆先导压力信号设定原始电流信号对应表格。斗杆运动过程中,由于实际原始先导压力变化过于灵敏,根据先导得到的电流信号需根据手柄内收和外翻按照不同的RAMPup和RAMPdown改变速率进行处理。
2) 阀芯电流大小处理:斗杆阀芯电流控制设置电流起调、终调点,设置相对应最低阈值以及最高阈值。当先导压力转换为电流低于最低阈值Imin时,直接关闭阀芯驱动电流;当转换电流高于最高阈值Imax时,保证阀芯驱动电流最大。最终得到阀芯驱动的设定电流ivlv。
2.3 泵的流量控制
1) 正常无突松手柄操作:为了使阀芯动作和泵动作能够跟随一致,本文未采用原始先导压力对应泵的设定电流,而采用阀芯设定电流ivlv对应处理得到用于计算泵流量的先导压力pvlv,根据该二次处理得到的先导压力信号pvlv进行斗杆需求流量计算。若期间存在除斗杆外其他动作,分别计算其他部分所需求流量。依据总流量计算公式汇总总泵所需计算流量。泵流量决策对应泵的驱动电流,电流越大,泵的流量供应越多。
总流量计算公式如下:
式中:Qdes——总泵的需求流量;Qmax——该泵供的所有动作的最大流量;Qsum——该泵供所有动作中的流量总和;fac——流量修正系数。以上操作即可以实现正常操作时的泵阀一致性,泵的供应流量随先导呈正相关变化。先导越大,泵的流量越大;先导越小,泵的流量供应越小。待先导压力完全关闭时,将泵的流量完全关闭。
2) 突松手柄操作:当处于突松手柄工况时,需对二次先导信号pvlv进行再处理,以及增加对阀芯开度的检测。突松斗杆,先导压力变化得太快。此时若仍旧采用由阀芯设定电流ivlv对应来的二次先导信号pvlv,则会造成泵压波动较为剧烈,容易引起整车冲击大。于是在检测突松手柄工况时,当阀芯电流低于设定阈值时,二次先导压力采用原始报文信号,保证泵的控制信号更加跟随实际工况,即可实现泵和阀芯的分布控制关闭。降低泵压的变化,减小停止冲击。
3) 电流修正系数的控制:电流改变速度除去先导压力的变化情况以外,还根据整车过程中的发动机转速变化、泵压变化等不同的压力参数和转速参数对泵电流改变速度进行修正,保证电流变化随整车实际需要,防止泵压变化剧烈,降低整车冲击。
2.4 反馈控制
当斗杆停止时,检测斗杆停止时的冲击状况。若整车冲击显著改善,泵压变化缓和,则保持此时设定参数,后续突松手柄动作均按照该流量阀芯设定系数进行修正;若整车冲击仍旧难以接受,则重新再次调节泵电流设置的阀芯电流阈值,以及先导压力变化速率,直至冲击满足需求。
3 结果验证
在挖机仿真平台进行试验验证。之前的程序版本采用的是原始先导压力控制泵流量,以及原始先导压力控制阀开度的并行控制,没有考虑阀泵的相互制约,也没有考虑突松手柄的操作,导致泵压波动较为剧烈,冲击较大。更新自适应斗杆控制逻辑,泵压改善显著,具体仿真结果导出如图2所示。
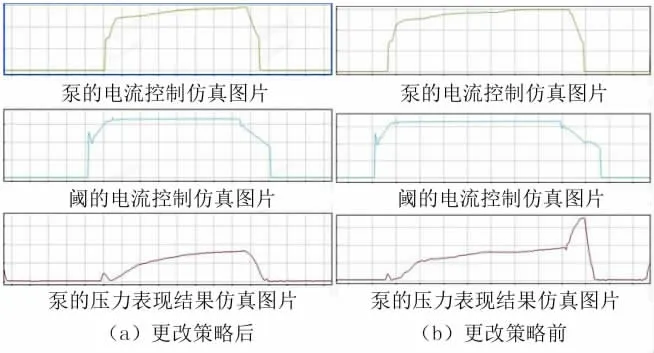
图2 动态优化方法物理仿真实验结果比较图
图2信号从上到下依次代表原始报文压力信号、斗杆电流信号、泵的压力信号。其中泵压与整车冲击度联系密切,冲击越大,泵压波动越剧烈。图2a为修改策略之后的仿真图,图2b为修改策略之前的仿真图,可见泵压变化有明显改善,该方法策略能够有效降低斗杆冲击。
4 结论
1) 本文提出的斗杆自适应控制方法,综合考虑了泵和阀的协同控制。既保证正常操作手柄时泵和阀能够同开同闭,保证操控性和连贯性,又保证了突松手柄时阀芯和泵电流错开关闭,保证了驾驶体验的舒适性。
2) 本文提出的斗杆自适应控制方法注重驾驶员的驾驶体验,在整车冲击大驾驶不舒畅时,又可以反馈控制重新调节之前设置的相关参数,保证整车的实时更新性和自适应性。
猜你喜欢
液压与气动(2024年4期)2024-04-25 10:58:58
机械设计与制造(2022年7期)2022-07-27 13:53:58
文萃报·周二版(2021年35期)2021-09-13 02:35:59
化工管理(2021年14期)2021-06-10 02:03:56
读者·校园版(2020年16期)2020-08-17 07:17:39
科学与财富(2020年5期)2020-05-06 09:17:22
成组技术与生产现代化(2019年3期)2020-01-14 02:11:58
建筑机械化(2018年6期)2018-06-29 08:18:56
中国科技博览(2017年44期)2017-12-14 06:50:10
岁月(2016年5期)2016-08-13 00:32:59
