水声信号发射机的全桥功率放大电路设计
2023-10-21 06:49:14石春华江逸涛
上海船舶运输科学研究所学报 2023年4期
石春华, 江逸涛
(上海船舶运输科学研究所有限公司 舰船自动化系统事业部, 上海 200135)
0 引 言
目前常用的水声信号发射机功率放大电路主要采用变压器半桥推挽结构,该电路因具有驱动结构简单和输出效率高等优点而广泛应用于水声发射机中。一般采用变压器半桥推挽拓扑结构的电路需要功率管承受2倍的输入电压,对功率管耐压指标的要求比较高,故该电路不适宜在对输入电压有很高要求的情况下应用[1]。采用全桥拓扑结构的功率放大电路能有效降低对功率管耐压值的要求,不影响其输出功率,非常适合大功率发射机应用。本文主要介绍全桥功率放大电路的原理,通过计算确定驱动芯片的型号、驱动电阻的参数和自举电路的参数,结合PSpice仿真技术对经典全桥电路进行优化调整,使其输出波形满足水声发射机的要求。
1 全桥功率放大电路原理
全桥功率放大电路需要4个N沟道功率管(见图1),功率管Q1与功率管Q4为一组,功率管Q2与功率管Q3为一组,通过固定脉宽长度的差分驱动信号VIN+和VIN-令2组功率管交替导通,在负载RL两端形成2个方向的交替电流,最终在负载两端输出峰值为VDD的2个差分波形。
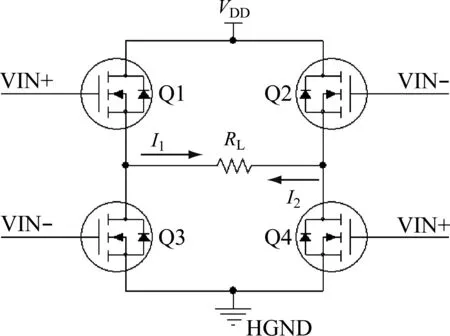
图1 全桥功率放大电路
在全桥电路中,Q3和Q4的源端接地,称为低侧功率管,其驱动信号以地为参考,若要令Q3或Q4导通,只需令其栅极电压大于功率管的开启电压。Q1和Q2的源端接到负载,称为高侧功率管,当Q1或Q2导通时,会使其源端电压等于输入电压VDD,若栅极电压不提升,则栅源之间的电压会小于功率管的开启电压,功率管又关断。因此,若要使高侧功率管保持导通,需提升栅极电压,只有如此才能使栅源之间的电压在导通阶段始终大于功率管的开启电压。通常采用自举电路提升高侧功率管的栅极电压,原理见图2。

图2 自举电路
图2所示自举电路为全桥左侧自举电路,其中:二极管D和电容C分别为自举二极管和自举电容;VB管脚为高侧驱动电源;VS管脚为高侧驱动浮动电源。受驱动信号控制,当高侧功率管Q1截止、低侧功率管Q3导通时,Q1的源端通过导通的Q3接地,电源VCC通过充电电阻Rb和自举二极管D为自举电容C充电,令C两端的电压约等于电源电压VCC;当高侧功率管Q1导通、低侧功率管Q3截止时,自举电容处于放电状态,此时Q1源端电压约为VDD,由于电容两端电压不能突变,VB管脚电压VB(即栅极电压)约为VDD与VCC(电容充满时)之和,故栅源之间的电压能保持在VCC附近,这样能在Q1导通的状态下,使栅源电压始终参考Q1的浮动源级电压,即VS端电压VS。
2 栅极驱动芯片的确定
由于采用的是全桥拓扑的功率放大电路,原来在变压器半桥推挽电路上使用的功率管IRF38N20D仍能在全桥电路上使用,且漏源之间的电压为原来的50%。由IRF38N20D的数据手册可知,栅极电荷Qg=60 nC,发射机的最大发射频率f=100 kHz,电路的栅极驱动电压VDRV=12 V,因此1个功率管栅极的电荷损耗PDRV=QgfVDRV=0.072 W,驱动栅极所需的平均电流Ig=fQg=0.006 A。结合全桥功率放大电路的应用,要求有1路高侧驱动输出和1路低侧驱动输出,电路中需要2个驱动芯片驱动4个功率管,本文采用驱动芯片IR2110,其主要特性如下:
1) 具有独立的高低侧输入输出通道;
2) 栅极驱动电压的取值范围为10~20 V,符合驱动电路对供电电压(12 V)的要求;
3) 浮动高侧电源电压VS可达500 V,大于功率管漏极高压60 V;
4) 开关延时时间为120 ns和94 ns,远小于发射频率对应的时间周期10 μs;
5) 输出驱动电流为2 A,远大于Ig。
综上,驱动芯片IR2110满足电路的要求。
3 经典驱动电路设计
3.1 确定外部栅极驱动电阻Rg
栅极驱动电阻Rg(分别为R1、R2、R3和R4)根据发射频率f选择。图3为栅极驱动电阻示意图。

图3 栅极驱动电阻示意图
栅极驱动电流的计算公式[2]为
(1)
式(1)中:VCC为电源电压;VGS为栅源电压;Rg为栅极驱动电阻。已知Ig=0.006 A,VCC=12 V。由功率管IRF38N20D的栅电荷与栅源电压曲线可知,60 nC的电荷量需要VGS>10 V才能保证功率管达到完全开启的状态,这里期望VGS接近VCC,取VGS=11.5 V,将其代入式(1)中可计算得到Rg=83 Ω,实际设计的Rg应小于83 Ω,以提供一定的余量。Rg能影响功率管的开关速度:Rg增大会使开关速度下降,导致波形上升/下降变缓;Rg减小能使开关速度加快,但易引起尖峰和振荡。因此,Rg的取值需在小于83 Ω的情况下综合考虑。
3.2 确定自举电路参数
3.2.1 确定自举电容C
图4为自举电路充电回路。由图4可知,自举电路主要由自举电容C、自举电阻Rb和自举二极管D组成,其中自举电容C是最重要的元件,为高侧功率管的源端提供浮动偏置。为确定自举电容C的参数,需优先确定高侧功率管Q1导通时电容两端电压VBS的最大容许压降ΔVBS,因为驱动芯片IR2110对高侧浮动电源有欠压保护作用,一旦VBS小于欠压阈值VBSUV,芯片会因处于欠压状态而停止工作。ΔVBS可根据图4确定,Q1导通时电容C放电,使VBS下降,然后Q3导通,自举电路进入充电状态,有

图4 自举电路充电回路
ΔVBS≤VCC-VF-VGSmin-VDSon
(1)
式(1)中:VF为自举二极管的正向导通电压,通常为1 V;VGSmin为栅源的最小驱动电压,要求大于VBSUV,根据IR2110芯片手册,VBSUV=9.4 V;VDSon为低侧功率管导通时的管压降,此时电流约为10 A,由IRF38N20D手册可知,导通内阻约为0.054 Ω,由此可得VDSon=0.54 V。将这些参数代入式(1)中,可得ΔVBS≤1.06 V。
自举电容两端电压VBS在每个开关周期内的压降主要是以下几个因素[3]导致的:
1) 功率管开启时需要的栅电荷Qg;
2) 功率管栅源之间的泄电流ILK_GS;
3) IR2110静态VBS的供电电流IQBS;
4) IR2110浮动电源的泄电流ILK
5) IR2110内部电平位移器需要的电荷量QLS;
6) 自举二极管D的泄电流ILK_D;
7) 高侧功率管导通时间Ton;
8) 自举电容C的泄电流ILK_C。
以上参数均能根据数据手册得到,1个开关周期内的总电荷量的计算公式可表示为
QTOT=Qg+QLS+(ILK_GS+IQBS+ILK+ILK_D+ILK_C)×Ton
(2)
自举电容C的计算公式可表示为
(3)
这里在对C进行取值时需放大一点余量,取C=220 nF,采用瓷片电容作为自举电容。
3.2.2 确定自举二极管D
二极管在自举电路中的主要作用是当高侧功率管开启时,用来防止高压回流至驱动电源端造成电路受损,故需要二极管反向电压VR>VB=72 V,并保有一定的余量。此外,二极管的正向导通电流IF满足IF>Ig,保证驱动电流足够。同时,为减少电荷损失,选择ILK_D较小的反向恢复二极管[4]比较合适,这里选用英飞凌的SMBD7000,其主要参数见表1。

表1 SMBD7000主要参数
3.2.3 确定自举电阻Rb
自举电容C的充电时间常数τ=RbC,由发射频率可知,电容的充电时间需小于5 μs。充电时间t的计算公式可表示为
(4)
式(4)中:V0为电容初始电压,这里V0=0 V;Vt为t时刻的充电电压,要求Vt≥10 V。根据式(4)对Rb进行合理取值,使t<5 μs。在自举电容C=220 nF的条件下,取Rb=10 Ω,此时充电时间t=3.94 μs。当对自举电容充电时,串联的Rb还能起到限流的作用。
4 电路仿真及改进
利用Cadence PSpice仿真技术对全桥电路的参数进行仿真验证,在Cadence软件中输入IR2110的PSpice模型代码,并生成仿真模型,绘制全桥功率放大电路,信号源波形为单正极性方波,频率为100 kHz,信号为12Vpp的差分信号,部分代码如下:
{.SUBCKT IR2110 LO HO COM VSS LIN HIN VCC VB VS VDD SD
R_HIN HIN VSS 1E12
C_HIN HIN VSS 1F
R_LIN LIN VSS 1E12
C_LIN LIN VSS 1F
R_HO HO VS 1E12
R_LO LO COM 1E12
R_VB VB VS 1E12
R_VDD VDD VSS 1E12
R_VCC VCC COM 1E12
R_VS VS COM 1E12
R_VSS VSS COM 1E12
R_SD SD VSS 750K
C_SD SD VSS 1F
R_DT DT VSS 1
C_DT DT VSS 1P
X_GD_TEMPLATE LO HO COM VSS LIN HIN VCC VB VS SD DT VDD IR2110_GD_TEMPLATE
.ENDS IR2110}
全桥仿真原理图见图5。

图5 全桥仿真原理图
4.1 结合仿真确定Rg的值
根据Rg的取值范围更改电路中R1、R2、R3和R4的值,查看高侧功率管栅源电压VGS的驱动波形。图6和图7分别为Rg取值为20 Ω和10 Ω时高压侧功率管VGS的驱动。
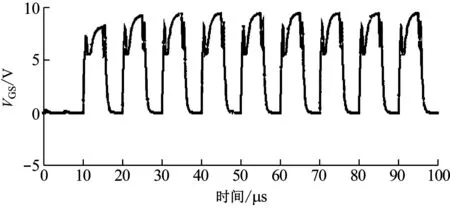
图6 Rg=20 Ω时高侧功率管VGS的驱动波形
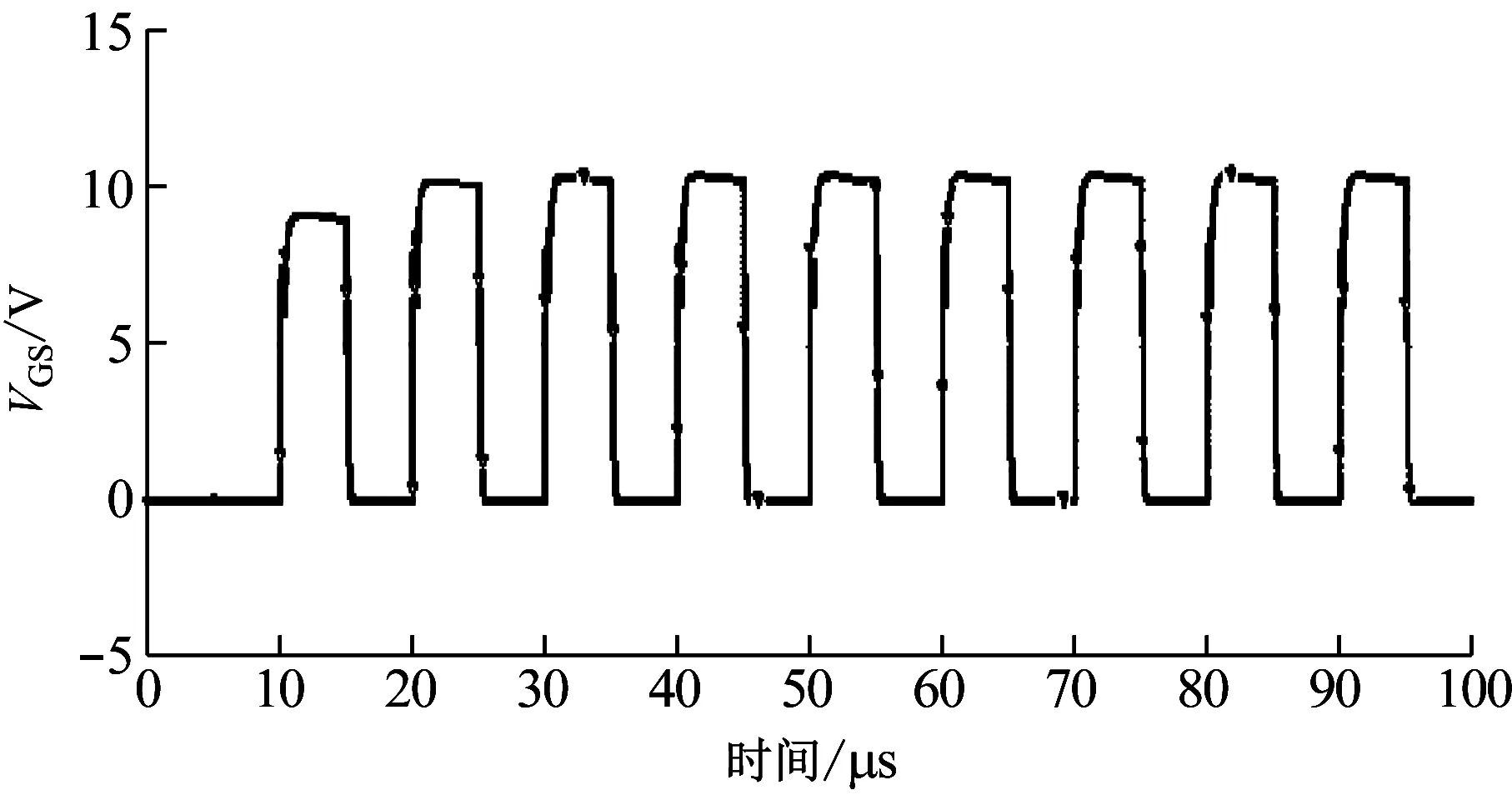
图7 Rg=10 Ω时高侧功率管VGS的驱动波形
由图6和图7可知:当Rg过大时,VGS上升变缓,且无法达到要求的开启电压,同时放大了弥勒效应;当Rg=10 Ω时,功率管输入电容均能充电至要求的开启电压,VGS的波形满足发射机的要求。
4.2 结合仿真确定自举电容C
根据之前计算得到的C的取值范围进行仿真,结合式(4),在Rb=10 Ω的前提下,查看自举电容C取不同数值时高侧功率管VGS的驱动波形,见图8~图10。

图8 C=100 nF时高侧功率管VGS的驱动波形
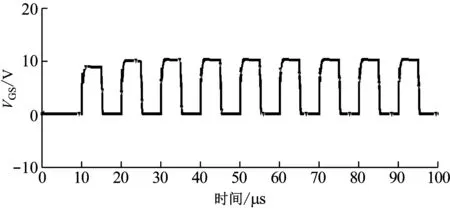
图9 C=220 nF时高侧功率管VGS的驱动波形
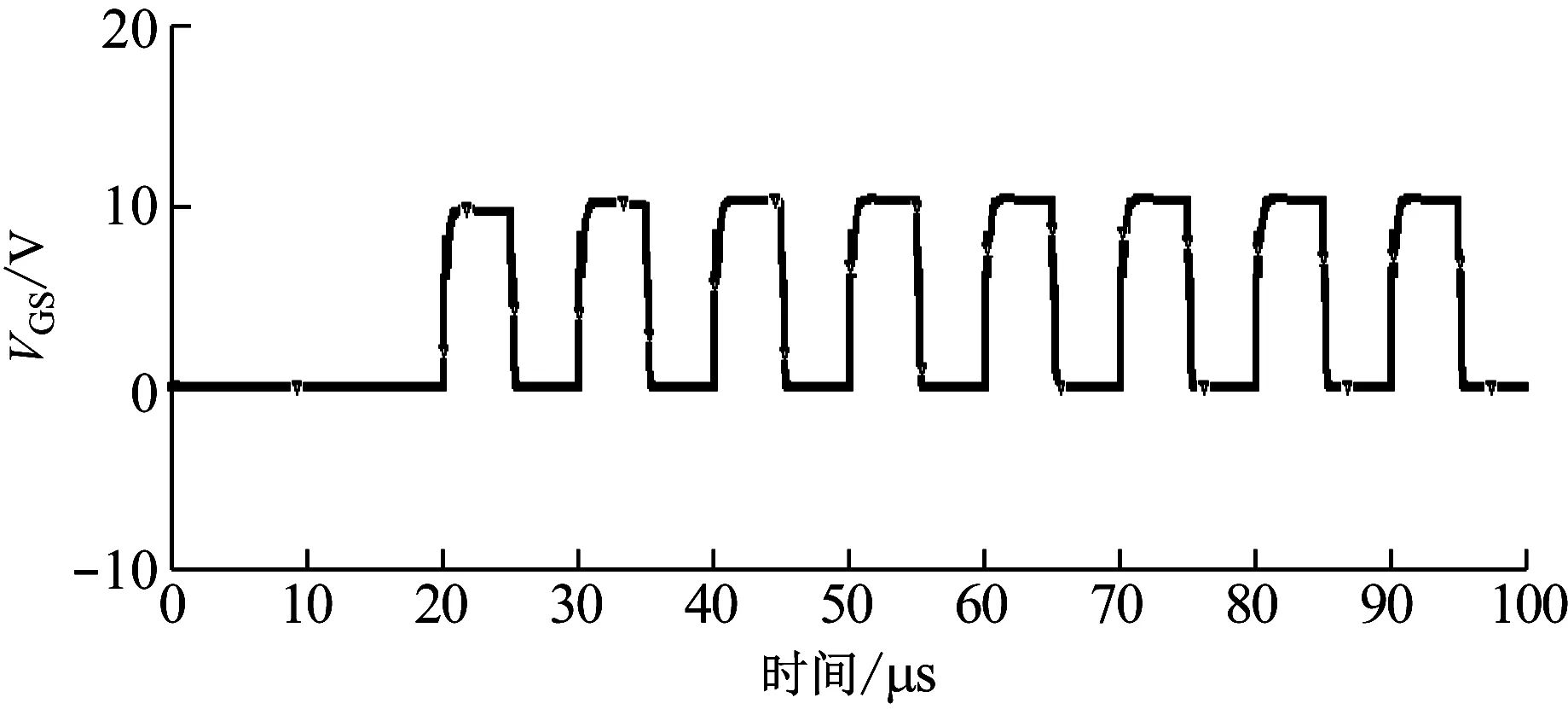
图10 C=330 nF时高侧功率管VGS的驱动波形
由图8~图10可知:当C=100 nF时,VGS的驱动波形能达到发射机的要求,但其幅值略小于10 V,由功率管IRF38N20D的栅电荷与栅源电压曲线可知,60 nC的电荷量需要VGS>10V才能保证功率管达到完全开启的状态;当C=330 nF时,在工作频率为100 kHz的限制条件下,低侧管导通时C的充电时间为5 μs,根据式(4),在电容取值过大的情况下,无法在这段时间内充满电,致使功率管在初始的1~2个脉冲内无法开启,VGS的驱动波形在初始阶段有缺陷;当C=220 nF时,VGS的驱动波形和幅值均基本上满足发射机栅极波形的要求。
4.3 全桥功率放大电路关键节点仿真及改进
确定各关键器件的参数之后,对图5中探头标识的关键节点进行仿真验证,结果见图11和图12。
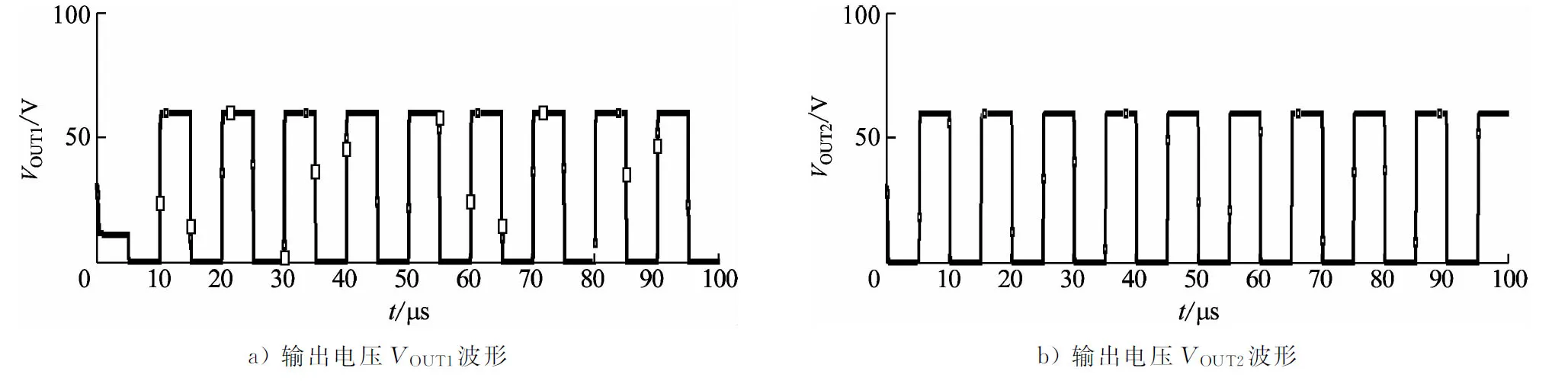
图12 功率放大电路输出负载两端的波形
由图11和图12可知,设计的功率放大电路的输出波形基本上满足发射机的要求。根据图中Q1的栅源波形和输出电压VOUT1的波形,5 μs之前波形存在缺陷,第一个本应是高电平的脉冲,但此时Q1呈关断状态,分析电路原理可知,在上电的开始阶段,驱动不会立即建立,且Q3在第一个脉冲出现时呈关断状态,导致自举电容C1无法正常充电,也就使Q1的栅源电压无法满足功率管的开启条件,以致输出电压VOUT1的波形在第一个脉冲内呈低电平状态。
为此,对自举电路稍作更改,在仿真电路(如图6所示)中增加自举启动电阻R11和R12,见图13。启动电阻的作用是在电路上电之后和驱动未建立之前,所有功率管均处于关断状态,此时对自举电容C1和C2充电,以确保在建立发射驱动时不再出现上述现象。在这些条件下,C1先通过R9、D1和R11充电,当R11=20 kΩ时,充电至10 V需要的时间为

图13 添加自举启动电阻R11和R12后的全桥原理图
(5)
阻值越大,充电时间越慢。然而,当高侧功率管导通时,会在R11和R12上有60 V的电压,这时在R11和R12上的瞬时功耗为180 mW,因此R11和R12取值不宜过小,避免带来不必要的功率损耗。改进后的功率放大电路输出负载两端的输出电压波形见图14,波形前端的脉冲缺陷得到改善。

图14 改进后的功率放大电路输出负载两端的输出电压波形
5 结 语
本文基于现有发射机的应用情况,通过理论计算和仿真设计了全桥功率放大电路,利用Cadence软件对该电路的关键参数进行了仿真验证和部分改进,验证了设计的全桥功率放大电路的原理、器件型号和参数能适用于水声发射机,为以后该电路的实际应用打下了基础。全桥电路具有高效的电源利用率,为提升发射机的功率提供了理论基础,同时器件增多给实际电路的应用带来了很多新的挑战,如复杂度提升、损耗增加、发热和体积增大等,这些问题有待在后续研究中解决。
猜你喜欢
现代信息科技(2022年1期)2022-06-20 09:02:46
现代信息科技(2022年2期)2022-06-15 15:52:45
电脑与电信(2018年12期)2018-03-23 02:37:14
中国科技博览(2017年41期)2017-11-25 15:49:26
中国新通信(2017年5期)2017-04-13 23:18:44
电测与仪表(2016年4期)2016-04-11 09:48:06
科技视界(2016年4期)2016-02-22 11:53:55
铁道科学与工程学报(2015年4期)2015-12-24 12:11:25
电测与仪表(2015年23期)2015-04-15 00:31:22
电子设计工程(2015年3期)2015-02-27 12:03:53