基于超网络的无人作战装备体系建模研究
2023-10-20 08:41孟宪良汪文峰
火力与指挥控制 2023年7期
孟 乐,张 琳,赵 强,孟宪良,汪文峰
(1.空军工程大学,西安 710051;2.解放军31662 部队,甘肃 临夏 731100;3.解放军93704 部队,河北 廊坊 065000)
0 引言
随着高新技术的发展,现在战争所面临的条件正在发生改变,作战样式也发生深刻变化。当前基于网络信息化条件下的联合作战,正向智能化和无人化技术支持下的协同作战转变。因此,构建适合无人作战装备体系特点的体系模型,深入探究性能特点和内在机理,提升整个作战体系的情报、侦察、控制、指挥和打击能力,发挥无人作战装备的效能优势,是当前研究的一个重要方向[1-2]。
无人作战装备体系作为当前的新兴力量,广大学者对其研究取得了不少的成果。张宇等基于DoDAF 结构框架对无人作战体系进行了模型建立,明晰作战要素的交互关系,为无人作战体系结构研究提供了支撑[3]。丁茜等通过对UAF 方法的分析,通过多视角框图构建,为研究作战装备体系性能提供了新思路[4]。邹立岩等对无人机集群作战的建模框架、作战效能分析、自主控制方法和仿真平台等方面进行了分析,对有关建模仿真面临的挑战进行了思考,对集群作战效能的提升具有重要的参考价值[5]。通过总结发现,无人作战装备体系研究多侧重于定性研究,典型代表为DoDAF,主要是对体系的多视图框架模型搭建,完成多视角下的作战活动分析,但由于该模型没有相应的算法支撑,作战性能和作战机理研究不够深入[6-7]。部分学者将作战装备体系抽象为单层网络,但是功能各异的装备节点区分不够明显,信息关系描述欠缺,网络结构不够简明,模型分析较为困难。而超网络是在超图理论和复杂网络的基础上发展而来,通过建立多层网络结构,分析网络的节点、边和聚集系数等,能够在定量角度进行体系性能研究,是当前比较适合建立无人作战装备体系模型的方法。
超网络通常是指存在虚拟节点和边,并且结构复杂、存在异质节点的超大型网络,具有多层级、多维度、多属性和多准则等基本特征[8-9]。模型建立是通过对作战装备和信息关系进行抽象映射,分层构建网络结构,使得作战装备体系研究更加便捷,被应用于各个领域。聂俊峰等针对云作战模式提出了动态超网络模型,通过构建网络结构特征参数,验证了云作战体系结构相对于传统作战体系的优势,为未来海上编队作战提供了理论支撑[10]。荣明等以作战体系的超网络模型为研究对象,对体系的弹性特征进行了分析,设计弹性度量CSoSIR 算法,为体系弹性评估提供了新思路[11]。黄树江等针对作战体系提出了基于时序的超网络模型,在局域空间点超度择优演化机制的基础上对作战体系的性能进行分析和研究[12]。因此,构建基于超网络的无人作战装备体系模型,是研究作战效能发挥的关键。
1 无人作战体系的特点
当前作战装备呈现出智能化、数字化和自适应性等特点,传统作战样式发生深刻变革。因此,无人作战装备要适应未来高技术条件下的作战样式,将向以下方面进行发展。
1)无人作战装备体系的结构模式呈现分布式特征。突出特点是“去中心化”,各作战装备在指挥控制、信息传递和火力打击等任务中具有平等的地位,去除了关键性的节点装备,体系呈现扁平化,作战过程中不会因为某些节点遭受打击而导致整个作战体系瘫痪。同时,节点之间通过信息流连接起来,作战任务动态分布,信息实时共享,功能相同节点装备实现互补,作战体系的抗干扰性和鲁棒性大大增强。
2)无人作战装备系统的自适应性和智能化程度更高。当前的武器装备出厂后,装备性能较为固定,在作战中发挥的效能存在上限,导致作战样式较为单一和固定,无法发挥出体系的协同效应。而无人武器所具有的感知、抽象、学习和推理能力,能够根据复杂多变的战场环境和敌情信息,在坚决贯彻指挥员的决心意图前提下,协调调动整个作战装备体系的信息和资源,动态规划作战路径和方法,高效完成既定任务[15]。
3)无人作战装备系统趋于模块化和集成化。随着技术的发展,无人作战装备趋于小型化和模块化,功能向单一方向发展,作战体系呈现分布趋势,增强体系的抗打击能力。同时,通过发展开放式的架构体系,兼容异构装备体系,不断增加作战体系的功能。无人装备实现模块化和集成化,使得单个装备在平台之间的通联更加顺畅,保障更加便捷,降低了成本,有利于装备的集群化作战和蜂群作战能力的发挥[16]。
2 基于超网络的模型建立
无人作战装备体系通过遂行的作战任务,实现装备之间的互联互通,体系呈现出网络化的结构特点。
2.1 装备节点抽象
作战体系的节点主要为作战装备。根据作用发挥的不同,可区分为侦察预警装备、指挥通信装备和火力打击装备等。因此,各装备根据功能可以映射为网络结构中不同类型的节点。同时,在基本的超网络结构中引入初始节点和终止节点两个虚拟节点,初始节点和终止节点均不属于无人作战体系,而是无人作战装备体系的外界任务的初始和终止源。
初始节点为无人作战装备体系所针对的任务源头,反映侦察预警系统的情报获取和态势感知能力;终止节点为无人装备体系的终止任务源,反映火力打击系统的打击能力。
2.2 信息关系抽象
在完整的作战体系中,各个节点装备通过信息流、打击流、态势流和资源流等相互关联,以构成完整的作战闭环回路。无人作战体系包含侦察预警装备节点、指挥通信装备节点与火力打击装备节点。功能相同的装备节点之间主要为信息流,体现为数据信息的交互。因此,各节点间的信息关系为双向性;功能不同的节点之间为情报流和任务流,表现为任务的流程,流向通常是初始节点、侦察节点、指控节点、火力节点到终止节点的顺序,因此,信息关系呈现为单向性。
2.3 网络层级构建
基于作战环理论,作战体系中的侦察类装备、指挥控制类装备和打击类装备与敌方目标构成完整的作战活动闭合回路。因此,将无人作战装备体系结构划分为3 个网络层级,分别是侦察预警层、指挥通信层和火力打击层。
侦察预警层通常为各类传感和探测装备对战场进行态势感知,获取战场环境和敌方目标信息,完成侦察监视功能。指挥通信层为指挥控制类装备完成决策指挥和情报传送,主要是对侦察预警层传输的数据进行综合研判处理,形成情报数据和指挥命令,传送至火力打击层节点装备。火力打击层是在指挥通信层的动态任务指令下,各火力单元协同配合完成既定任务。
因此,根据以上设定,针对无人作战装备体系的特点,构建为如图1 所示的有向加权网络。其中,S 为初始节点,T 为终止节点。
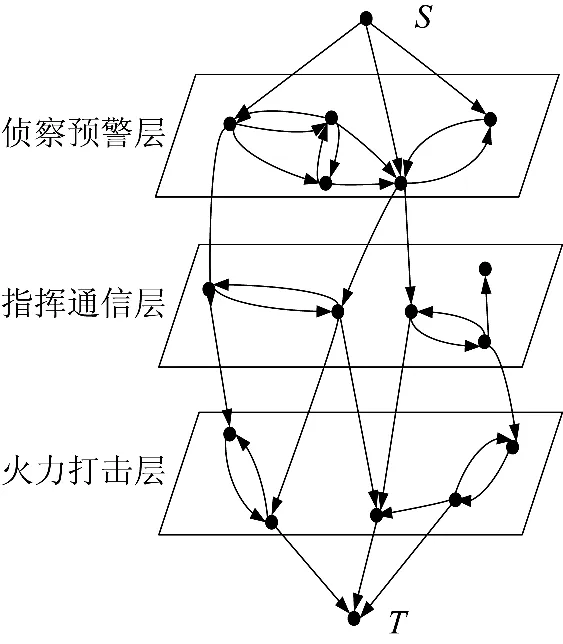
图1 无人作战装备体系网络示意图Fig.1 Schematic diagram of network of unmanned combat equipment system of system(UCESoS)
3 基于广度优先的路径搜索
对无人作战装备的体系性能分析时,首先要对作战任务流程进行规划,明确初始节点和终止节点;其次对网络结构的路径进行搜索,获取完成作战任务的所有路径;最后分析不同路径下的作战能力,综合分析后得到作战装备体系的性能特点。
当前无人作战装备体系网络结构示意图,层级间的节点路径为单向连接,层级内的节点路径为双向连接,导致路径搜索复杂,简单的路径搜索方法不太适应当前的有向加权网络结构。
广度优先搜索(breadth first search,BFS)通过系统地展开网络图中的所有节点,彻底对图中各节点进行分析,以获取所有路径,对有向图和无向图均适用。其算法思路如图2 所示。

图2 路径搜索算法框图Fig.2 Block diagram of path search algorithm
4 基于超网络的体系性能分析
针对当前无人作战装备体系,可以通过对超网络模型的层级和节点的关系进行分析,根据网络结构特征,得到整个作战装备体系的性能。
4.1 体系能力分析
体系能力按照功能可分为侦察预警能力、指挥通信能力、火力打击能力和信息共享能力。针对不同任务,各种能力通过构成体系超网络各节点的关系进行描述,与节点本身无关,因此,在对能力进行描述时,只需考虑网络边的权值。
4.1.1 侦察预警能力
侦察预警能力在网络中体现为网络边“初始节点——侦察节点”的权重,可通过发现概率Pd和虚警率Pf进行衡量:
4.1.2 指挥通信能力
指挥通信能力主要体现为信息传输能力,在网络中体现为网络边“侦察节点——指控节点”和网络边“指控节点——火力节点”的权重,可通过信道容量进行衡量:
其中,C 为信道容量;B 为信道带宽;SNR 为信噪比。
4.1.3 火力打击能力
火力打击能力在网络中体现为网络边“火力节点——终止节点”的权重,可通过火力节点主要通过武器精度p、杀伤范围Rk和杀伤概率Pk衡量:
4.1.4 信息共享能力
层级内信息共享在增加体系可能通路的同时也增加了信息共享成本及可能的信息损耗,直接通信相比接力共享通信具有更高的可用性和可靠性。即信息共享能力越高,对体系的负面影响越小。因此,层级内信息共享能力可表示为
4.2 任务耗时分析
任务耗时指从侦察预警到火力拦截全过程的用时,包括了侦察用时、通信用时、信息处理用时和火力拦截用时。针对不同任务,所耗时间不仅与节点间信息关系权重有关,还与节点本身信息处理耗时有关。因此,在对任务耗时进行描述时,不仅需考虑网络边的权值,还需考虑节点权值。
侦察用时和通信用时均可通过节点间距离d进行衡量:
其中,D 为探测信号传输距离,当设备为雷达、激光雷达时,D=2d;当侦察设备为红外雷达、光学设备及通信设备时,D=d。
信息处理用时与装备需处理信息的数量有关,可以通过网络的节点入度和出度kin和kout进行衡量。对于当处理多个信息时,随着信息量的增大,处理时间显著增大:
其中,tp*为信息处理的基本耗时。
火力拦截用时可通过拦截距离与拦截武器速度进行衡量:
其中,df为目标与拦截武器距离;v 为拦截武器速度;k 为修正系数,当拦截武器为激光等直线拦截型武器时,k=1,当拦截武器为导弹等追击拦截型武器时,k=。
4.3 体系性能评估分析
无人装备作战体系对于任务的完成程度与完成质量的好坏,取决于可能的执行通路数量、任务最长用时、任务最短用时、平均任务用时、任务最高性能、任务最低性能和任务平均性能。在网络中,节点和边均有两个权值,分别表示体系的能力和用时。
其中,每个层级都需要归一化过程,权值要进行单独分析和计算。
执行某一项任务M 时,对于任意路径P∈M,体系的平均能力可表示为:
平均用时可表示为:
最大能力和最短用时分别为按照能力权值和时间权值时,网络分别从节点S 到节点T 的最大路径长度和最短路径长度时进行相应计算。
5 案例分析
设某一无人作战装备体系由5 个侦察节点、5个指挥控制节点和5 个火力节点构成。侦察节点为4 个雷达和1 个光学设备,拦截武器为地空导弹。其中,侦察节点5 为光学设备。
在针对某一目标的“侦察——打击”任务下,目标既作为初始节点S,也作为终止节点T。则初始节点S 与侦察节点距离和火力节点距终止节点T 距离分别如表6 和表7 所示。
侦察节点的发现概率Pd和虚警概率Pf如表8所示。
各节点之间通信的信道带宽和信噪比分别如表9~表18 所示。

表1 侦察节点间距离/kmTable 1 Distance of reconnaissance nodes/km
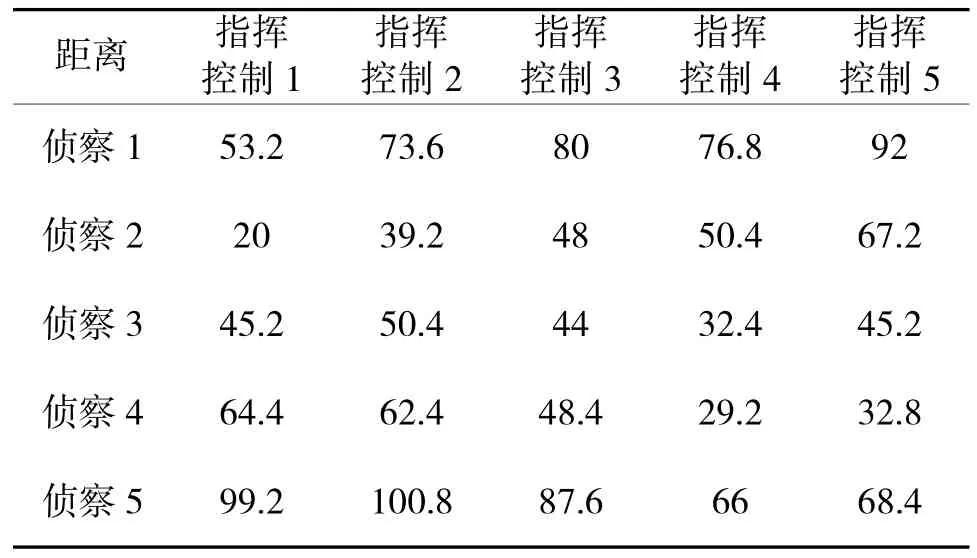
表2 侦察节点与指挥控制节点距离/kmTable 2 Distance between reconnaissance nodes and command and control nodes/km

表3 指挥控制节点间距离/kmTable 3 Distance of command and control nodes/km

表4 指挥控制节点与火力节点距离/kmTable 4 Distance between command and control nodes and fire nodes/km
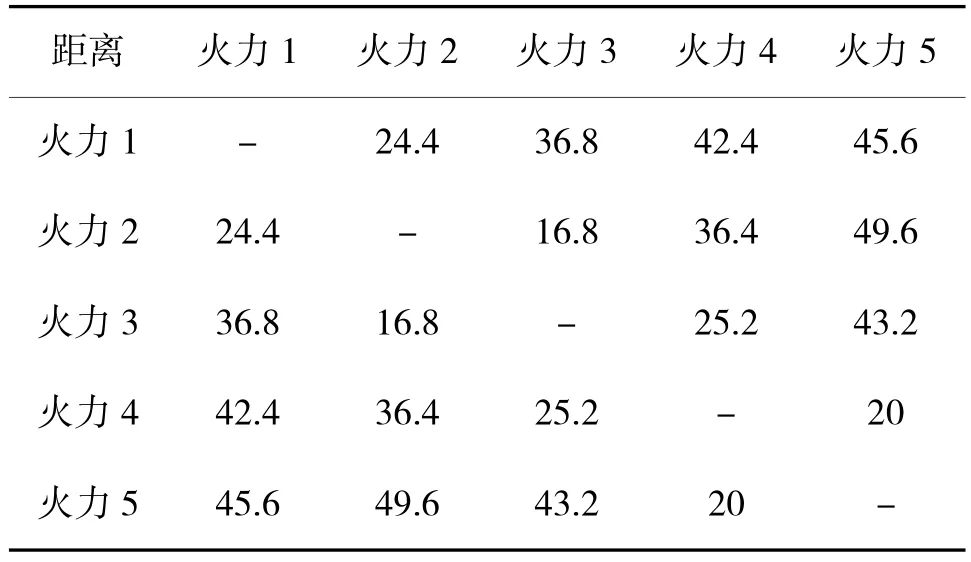
表5 火力节点间距离/km Table 5 Distance of fire nodes/km

表6 初始节点S 与侦察节点距离/kmTable 6 Distance of initial node S and reconnaissance node/km
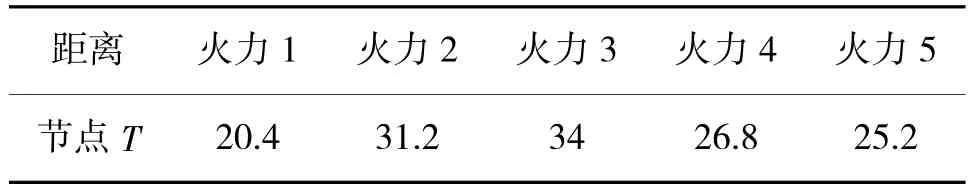
表7 火力节点与终止节点距离/kmTable 7 Distance of fire node and terminate node/km
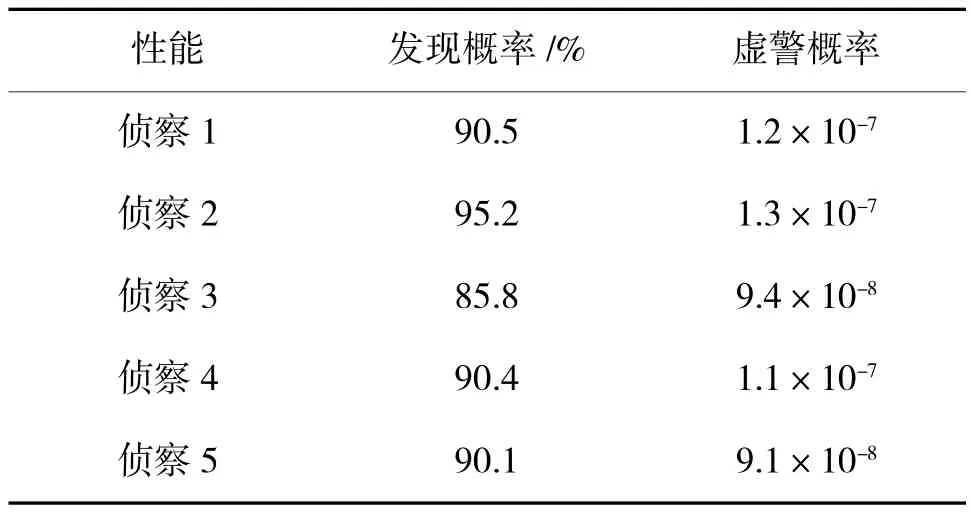
表8 发现概率与虚警概率Table 8 Probability of detection and false alarm

表9 侦察节点间通信带宽/MHzTable 9 Communication bandwidth of reconnaissance nodes/MHz

表10 侦察节点与指挥控制节点通信带宽/MHzTable 10 Communication bandwidth of reconnaissance nodes and command and control nodes/MHz

表11 指挥控制节点间通信带宽/MHzTable 11 Communication bandwidth of command and control nodes/MHz

表12 指挥控制节点与火力节点通信带宽/MHzTable 12 Communication bandwidth of command and control nodes and fire nodes/MHz

表13 火力节点间距离通信带宽/MHzTable 13 Communication bandwidth of fire nodes/MHz
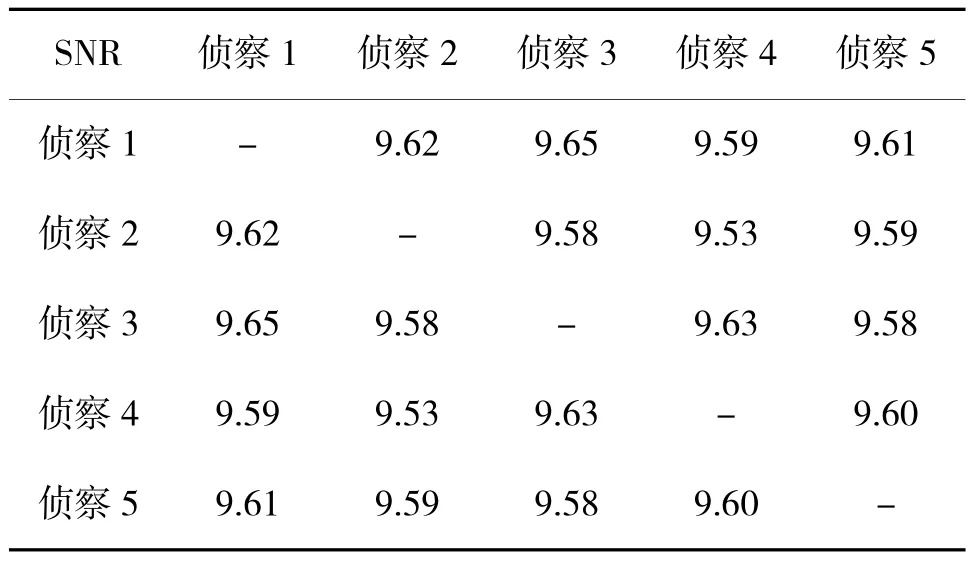
表14 侦察节点间通信信噪比/dBTable 14 SNR of communication of reconnaissance nodes/dB
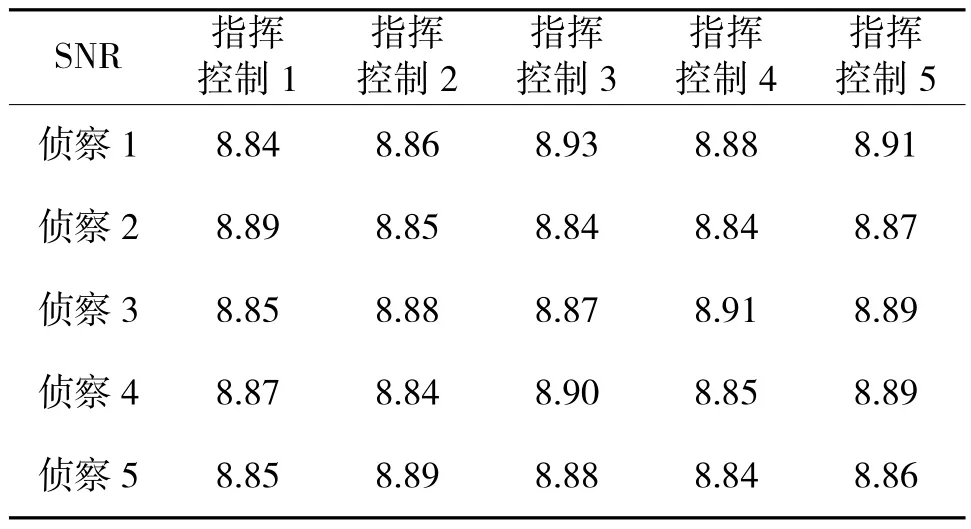
表15 侦察节点与指挥控制节点通信信噪比/dBTable 15 SNR of communication of reconnaissance nodes and command and control nodes/dB

表16 指挥控制节点间通信信噪比/dBTable 16 SNR of communication of command and control nodes/dB

表17 指挥控制节点与火力节点通信信噪比/dBTable 17 SNR of communication of command and control nodes and fire nodes/dB
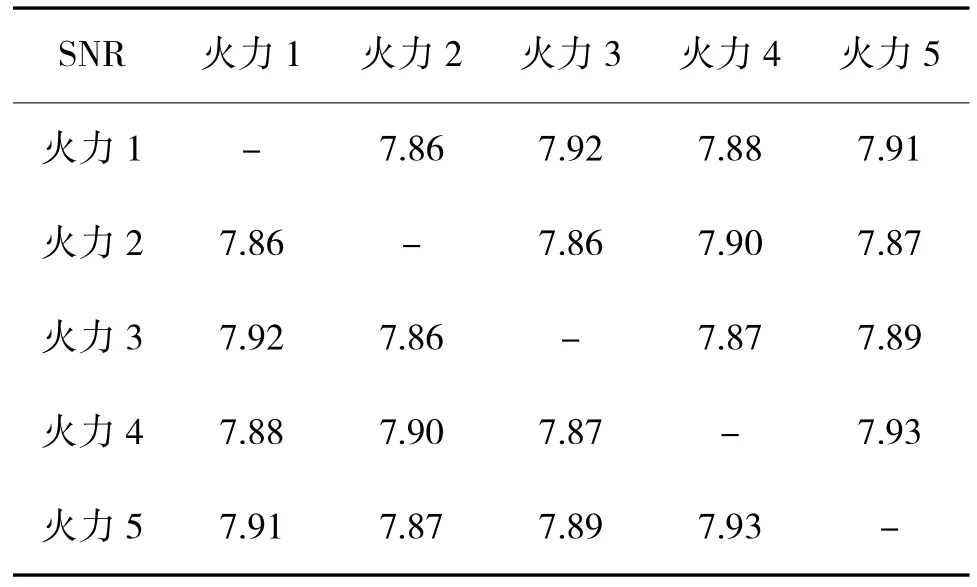
表18 火力节点间通信信噪比/dBTable 18 SNR of communication of fire nodes/dB
各火力节点的武器精度p、杀伤范围Rk和杀伤概率Pk如表19 所示。

表19 火力节点性能Table 19 Performance of fire nodes
针对作战任务,分别分析网络全连接、非全连接和简单连接的体系能力指标。网络全连接时,所有节点均有连接,层级间节点之间为单向连接,层级内部节点之间为双向连接;非全连接时,层级间和层级内均为部分节点连接或者参与任务,同时节点之间满足层级间单向连接和层次内双向连接的特性;简单连接时,所有节点间均为单向连接,层级内部的节点不具备双向连接特性,即节点的出度和入度均为1。通过计算,3 种情况下体系能力评估指标如表20 所示。

表20 体系性能指标Table 20 Performance indicators of system of system
从仿真结果可以看出,网络连接情况越复杂,任务可行通路数量越多,这是由于各层级节点的出入度较大,任务在完成路径搜索和信息传递的选择性较多。但可行通路的增加也带来了通路间的强耦合性,其中,一条通路中节点或边的失效将带来大量相关通路的失效。可见,虽然通路数量得到了明显增加,但有效通路数并不一定随之增加。因此,网络的抗毁性和鲁棒性并不一定随之增强。
同样,由于网络连接复杂度增大,节点度将显著增加,对装备而言带来的影响是装备信息处理系统负载增大,加大了信息处理的耗时。因此,无论是最短耗时、最长耗时还是平均耗时,均随着网络复杂程度的增大而明显变长。
对于网络的性能,可以看出,3 种情况最高的网络性能基本相同,这是因为3 种网络结构均具有较优的可行通路。但是,最低性能差别较大,这是因为复杂的网络结构虽然任务的可行通路较多,但是其中包含有较差的边和路径,导致其最差性能较差。但从总体上看,在具体任务执行上,通常选择该网络结构下的最优通路,其余通路均作为备份,保证网络的可靠性。通过合理的结构设置,可以保证备份通路的性能尽可能高。
可以得出,当对网络进行构建时,全连接和简单连接均有其存在的优缺点。当网络采用非全连接,并合理进行优化时,通常可以保证系统既有较高的任务执行能力,又有较短的任务耗时,同时还具有较高的网络抗毁性。
6 结论
本文通过对无人作战装备体系的网络模型构建,分析了作战装备体系的能力和时间的权值算法。通过对某无人装备作战体系进行构建,分别分析了全连接、非全连接和简单连接情况下的网络性能,对无人作战装备体系构建给出了建议。结果表明,对于某无人作战装备体系,当网络按照非全连接结构进行合理优化时,通常能够保证系统具备较高的性能,较短的任务耗时以及较优的抗毁性和鲁棒性。对于如何对网络结构进行优化,使其在执行任务时,具有最优的网络结构,也是下一步需要研究的内容。
猜你喜欢
政工学刊(2021年4期)2021-04-13
航天工业管理(2020年9期)2020-12-28
军事运筹与系统工程(2020年1期)2020-09-11
房地产导刊(2020年7期)2020-08-24
廉政瞭望(2019年5期)2019-06-10
火力与指挥控制(2017年3期)2017-04-24
系统工程与电子技术(2016年2期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
管理现代化(2016年3期)2016-02-06
管理现代化(2016年3期)2016-02-06