
非冗余舵面与RCS复合故障的自愈控制方法*
2023-10-18 05:55:46胡庆雷佘智勇刘旺魁
飞控与探测 2023年3期
韩 拓,胡庆雷,佘智勇,刘旺魁
(1. 北京航空航天大学 自动化科学与电气工程学院·北京·100191;2. 北京空天技术研究所·北京·100074)
0 引 言
临近空间飞行器具备飞行速度快、机动性强等特点,具有较高的发展潜力与应用价值。然而,由于飞行器结构复杂、飞行环境变化剧烈等内外部因素,可能会导致执行机构失效、卡死等故障,从而会影响到飞行可靠性和安全性,造成任务失败。因此,为了确保安全可靠飞行,需要研究执行机构故障下的安全自主控制方法。
安全飞行控制主要通过容错控制技术手段来实现,主要分为两类:被动容错控制与主动容错控制[1-2]。被动容错控制的主要思想是不需要故障诊断模块,通过设计鲁棒/镇定控制器来确保系统在故障等不确定影响下的可靠稳定控制。例如,文献[3]基于干扰观测器技术与滑模控制技术设计了高超声速飞行器容错控制方法,提升了系统的抗干扰能力。基于障碍李雅普诺夫函数,文献[4]设计了一种预设时间性能的被动容错控制律,以保证系统的稳定性。考虑到滑模控制的有效性,文献[5]设计了一种针对航天器的时变滑模被动容错控制方法。此外,针对高超声速飞行器的被动容错控制方法也得到了广泛研究,例如基于终端滑模控制[6-7]、障碍李雅普诺夫函数[8]、非奇异摄动理论[9]等方法的容错控制方法。被动容错控制方法的主要优势在于避免了对故障的检测与诊断,从而能够保证较高的算法效率。与被动容错不同,主动容错控制对故障进行检测与诊断,然后通过剩余健康执行机构的重构控制实现系统状态的自愈。例如,文献[10]基于观测器技术估计了故障的失效因子,并结合滑模控制设计了主动容错控制策略。文献[11]利用了超扭曲观测器估计伺服机构的卡死故障,从而设计了无人机的主动容错控制律。针对近空间高超声速飞行器,文献[12]研究了基于滑模观测器的故障诊断方法,并基于此设计了主动容错控制器。借助神经网络自适应故障诊断方法,文献[13]设计了一种非线性动态逆主动容错控制方法。针对微小等容易忽略的故障,文献[14]提出了只检测不诊断的故障补偿方法,并以此设计了主动容错控制策略。考虑到执行机构故障及控制饱和等问题,文献[15]对故障统一信息进行估计并设计了一种主动容错控制方法。主动容错控制的优势在于能够辨识故障信息并补偿到控制系统,从而提高故障下的系统鲁棒性及动态特性。
针对飞行器舵面故障下的主动容错控制,目前研究较多的是具有冗余舵面配置的飞行器。然而,非冗余舵面配置的临近空间飞行器,难以应对舵面卡死等故障,往往需要反推力矢量装置(Reaction Control System,RCS)加以辅助补偿故障力矩。尽管RCS与舵面一般情况下属于独立飞行时段,但是在大气稀-稠过渡阶段且RCS有剩余资源配置的情况下,RCS对于非冗余舵面的故障补偿与控制重构具有重要作用。因此,本文开展非冗余舵面与RCS复合故障的自愈控制方法研究,主要贡献如下:1)设计了一种异构混合机构故障检测与自诊断方法,并引入故障补偿控制器研究了RCS补偿作用下的舵面卡死重构自愈控制问题;2)提出了一种异构混合机构故障下的RCS故障分离判定方法,并给出了RCS故障喷管序列判定机制,进一步设计了异构混合机构故障下RCS在线重构的自愈控制器。最后,通过典型全弹道剖面的姿态跟踪数值仿真,验证了所设计方法的有效性及可靠性。
1 问题描述
本文研究混合执行机构配置的临近空间飞行器在稀-稠大气层过渡阶段,出现非冗余舵面以及RCS复合故障的情况,通过对故障进行自诊断与在线重构,实现对故障的自愈控制,从而保证飞控系统的安全性与可靠性。首先,给出飞行器的六自由度数学模型以及相关执行机构配置。
1.1 质心运动学模型
飞行器质心运动学三自由度模型主要包括高度、速度、弹道倾角等微分方程,具体如式(1)~(6)所示。
(1)
(2)

(3)

(4)


2ωe(tanγcosθcosϑ-sinθ)
(5)

sinγsinθcosϑ)/V
(6)
其中,h为飞行高度,V为速度,γ为弹道倾角,ϑ为弹道偏角,σ为倾侧角,φ和θ为经度与纬度。re,ωe,g分别为地球半径、自转速率、重力常数。L,D,m分别为升力、阻力、飞行器质量。
1.2 刚体动力学模型
飞行器刚体姿态动力学主要包括攻角、侧滑角、姿态角速率等微分方程,具体如式(7)~(12)所示。


ωe)cosφsinϑ]
(7)


(8)

sinφsinγ)
(9)
(10)
(11)
(12)
其中

α为攻角,β为侧滑角,Mr,Mp,My分别为滚转、俯仰、偏航通道力矩,p,q,r分别为滚转、俯仰、偏航角速率,Iij(i,j=x,y,z)表示惯性积。
1.3 气动力与气动力矩
升力与阻力可分别表示为
其中,Lref为参考长度,mr,mp,my为滚转、俯仰、偏航力矩系数且为马赫数、攻角、侧滑角、气动舵面的函数。
1.4 反推力矢量配置
针对气动操纵能力不足的问题,飞行器需要额外采用直接力反推矢量装置,其具体配置如图1所示。俯仰、偏航直接力喷管分布在飞行器尾部,滚动直接力安装在弹体周线上,具体如表1所示。

表1 直接力装置配置Tab.1 Direct thrust equipment settings
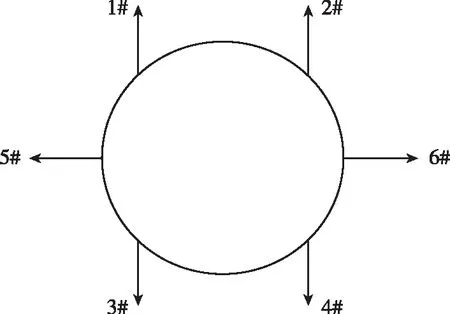
(a)俯仰偏航直接力喷管分布
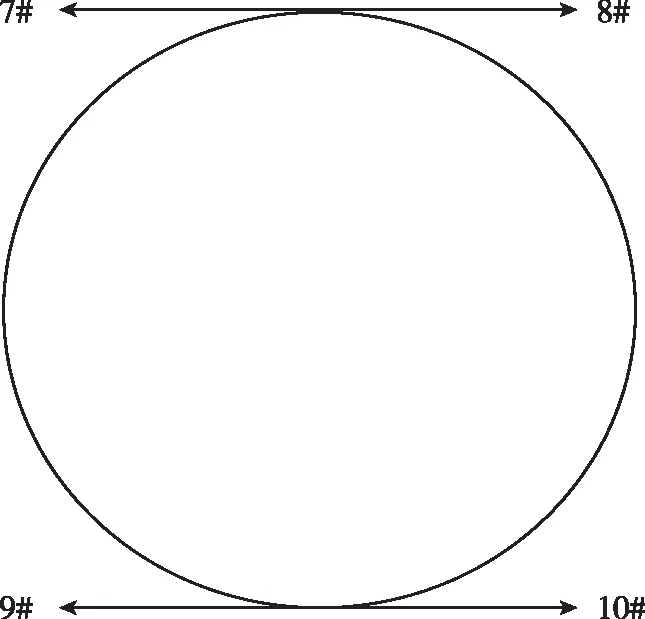
(b)滚动直接力喷管分布图1 直接力装置示意图Fig.1 Direct thrust equipment diagram
给定俯仰、偏航、滚转三个通道的RCS力矩为Mt=[Mrt,Mpt,Myt]T,则当气动面与RCS混合工作时,作用于导弹姿态动力学的总力矩可表示为
(13)
其中,n1=1,n2=0表示纯气动控制,n1=0,n2=1表示纯RCS控制,n1=1,n2=1表示气动面与RCS同时工作。
1.5 姿态误差动力学模型
为了能够跟踪运动学模型(1)~(6)生成的攻角、倾侧角指令,首先将姿态动力学(7)~(12)表示为
(14)
其中,Ψ=[α,β,σ]T,ω=[p,q,r]T,M=Ma+Mt=[Mr,Mp,My]T,Ma表示气动控制力矩,Mt表示RCS控制力矩。
将气动控制力矩表示为
Ma=PCu
(15)
其中,u=[δ1,δ2,δ3,…,δp]T,p≥3 表示实际工作舵面(本文p=3),C∈R3×p为舵面控制分配矩阵
其中,mij(i=r,p,y,j=a,e,r)为相应的mi对于舵偏角δa,δe,δr的偏微分项。
其次,将RCS控制力矩表示为
Mt=Zν
(16)
其中,ν=[ν1,ν2,ν3,ν4,ν5,ν6,ν7,ν8,ν9,ν10]T表示相应序号对应的RCS输出力矩大小(此处定义其均为大于零的常数),Z为RCS开关分配矩阵,具体为
(17)
其中,zi∈(0,1,-1),i=1,…,10为触发RCS开关的逻辑值。
定义参考指令为Ψc=[αc,βc,σc]T,跟踪误差为eΨ=Ψ-Ψc, 通过式(14)得到误差动力学方程为
(18)

注1:αc,σc是基于式 (1)~(6)满足终端与过程约束条件得到的参考剖面,βc为零,以满足BTT机动需求。

为了进一步考虑姿态系统的不确定性、外界干扰、执行机构故障等,将式(18)改写为
(19)
其中,Ω为统一外界扰动。
(20)
(21)
(22)

(23)
假设2统一外界扰动Ω是有界的。
2 异构混合执行器复合故障的自诊断方法
针对异构混合执行机构多发故障的情况,首先给出故障检测方法,然后给出在线故障自诊断方法,最后给出舵面及RCS复合故障的自诊断逻辑。
2.1 故障检测方法
首先,针对式(14)的角速率动力学模型,将其写成如下形式
(24)
其中,D=[PCZ]为分配矩阵,uc=[uν]T为所有执行机构组成的向量,f=-DEuc+Dua为故障向量,E为失效因子,ua为偏置故障。基于姿态动力学模型,设计故障检测模块如下
(25)

(26)

(27)
其中,λmin(·)表示最小特征值。
(28)
显然,可设置故障检测的触发条件为
(29)
其中,ξ为故障检测阈值。需要说明,上述检测条件为故障发生的充分条件,而非必要条件。
2.2 故障诊断方法
在系统检测到故障之后,需要启动故障诊断模块对故障进行在线自主辨识,以确定故障类型和故障大小,为控制重构提供技术支撑。首先,定义φ=f-HIω,H为增益矩阵,则
(30)
选取故障估计器[15]
(31)
其中,H1,H为正定增益矩阵。得到估计误差动力学如下
(32)
(33)
其中,μ=1/2[ε+(ε+1/)为正常数,矩阵S为
S=
根据文献[15]可知,当求解合适的H1与使得S为正定矩阵,则系统是最终一致有界稳定的,可使得即能够实时获取并跟踪故障信息的变化。
2.3 RCS与舵面复合故障诊断的分离策略
上述估计信息为三通道故障合成信息,仅对单一类型执行机构的诊断有效,而对于舵面与冗余RCS复合故障的情况,需要进一步设计故障诊断策略,以辨识具体RCS故障的来源。

其中,Φp,Φr分别为俯仰通道和滚动通道的故障RCS喷管判定序号,η1为误差阈值。需要说明,上述分离逻辑的前提是采用1,3;5,6;7,8号喷管作为主工作模式,其余喷管均在发生故障并完成故障诊断后进行冗余配置。由于偏航通道无冗余配置,因此暂不研究其故障判定。
3 自愈控制策略设计
上述故障检测与诊断模块可获取三通道故障合成信息,接下来需要基于故障估计信息设计自愈控制器,实现舵面/RCS的在线重构,以使偏离参考剖面的飞行状态能够自主愈合恢复,具体的自愈控制策略如图2所示。

图2 基于执行机构故障补偿的自愈控制策略Fig.2 Self-healing control strategy based on the actuator fault compensation
3.1 舵面故障补偿的自愈控制器设计
首先,针对舵面操控的不确定姿态模型(19),选取如下基准控制器[16]
(34)

将控制器(34)代入系统(19)可以得到
(35)


选取李雅普诺夫函数
(36)
其中,c1,c2,c3,c4>0为常值参数。
对(36)求导可得
(37)
为保证系统收敛,只需满足



因此有
可以看出,系统是渐近收敛的,即误差eΨ与eω可同时收敛至原点。
上述基准控制器对故障等不确定性具有一定的鲁棒特性。然而,随着故障等不确定性造成残差,会影响系统鲁棒性及自愈动态特性。因此,需要对舵面故障进行补偿
(38)
注3:由于所考虑舵面属于非冗余配置,因此故障补偿控制器仅对于部分失效、偏置类故障有效,而对于完全失效、非卡死类故障等情况,舵面无法应对并最终会导致系统发散。因此,针对稀-稠大气层过渡阶段非冗余舵面故障的情况,需要基于前述故障诊断模块对RCS进行在线控制重构,使飞行器能够完成故障下姿态的自主愈合。
3.2 RCS在线重构的自愈控制器设计
在稀-稠大气层过渡阶段,当非冗余舵面发生故障时,需要RCS重构以触发各通道喷管开关,实现受损系统的愈合。基于此,定义误差表征项
l=[lplylr]T=kΨeΨ+kωeω
(39)
其中,kΨ,kω为正参数。考虑到1,3;5,6;7,8号喷管作为主工作模式,因此故障模式也以主工作推力装置故障为主,则RCS工作常态设置为
定义故障下俯仰、滚动通道RCS开启阈值为ζp,ζr,其中ζr>0,ζp>0。基于RCS故障诊断分离判定的喷管序号分别为Φp、Φr,则可设计俯仰、滚动通道RCS重构自愈控制机制为
[z1,z3,z2,z4]=
[z7,z8,z9,z10]=
(40)
定义故障下偏航通道RCS开启阈值为ζy,其中ζy>0。由于偏航通道无冗余RCS配置,因此直接设计偏航通道RCS控制机制为
(41)
显然,在非冗余舵面故障的情况下,或者在RCS与舵面同时故障的情况下,上述RCS重构自愈控制机制(40)~(41)可以实现RCS的在线重构,从而保证飞行器的安全可靠控制。
4 典型算例与分析
本章基于某飞行器典型特征点、全弹道剖面跟踪等算例进行验证分析。考虑3个舵面提供气动力矩(定义为A、B、R),10个RCS(6个常态工作,4个冗余备用)提供舵面极端故障下的姿态力矩补偿,RCS力矩大小配置为:俯仰通道1500N·m,偏航通道1500N·m,滚动通道1500N·m。飞行器故障诊断与自愈控制相关参数如下

4.1 典型特征点仿真验证
4.1.1 舵面卡死+无RCS重构
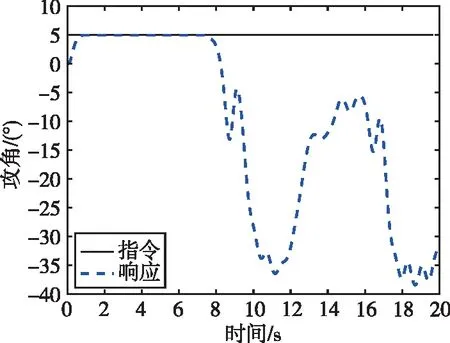
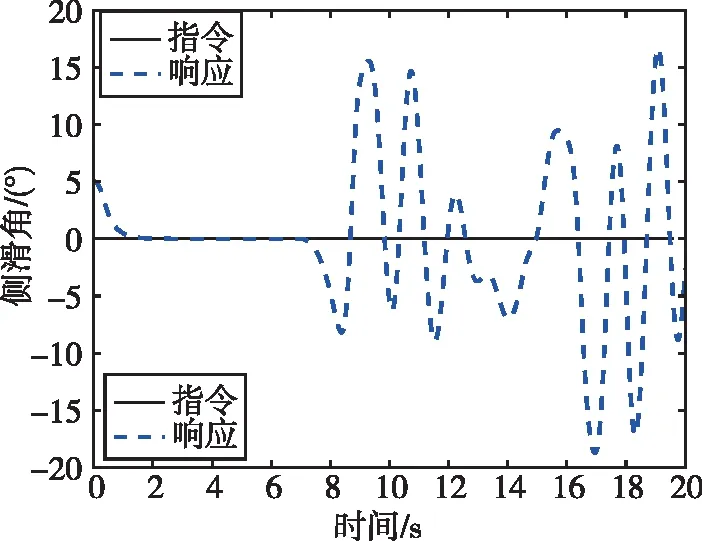
选取某马赫数为5,高度为30km,开展多源复合故障的自愈控制仿真验证。首先考虑舵面发生卡死故障,无RCS力矩辅助控制,结果如图3~图5所示。具体故障形式为:舵面B在7s处卡死在2°。可以看出,各姿态角由于卡死后无法提供额外力矩而发散,舵机控制指令的变化也无法使系统稳定,舵机卡死带来较大力矩故障。
(a)
(b)

(c)图3 舵面卡死+无RCS重构姿态角跟踪特性Fig.3 Reconfigurable attitude tracking performance under actuator stuck without RCS

(a)

(b)
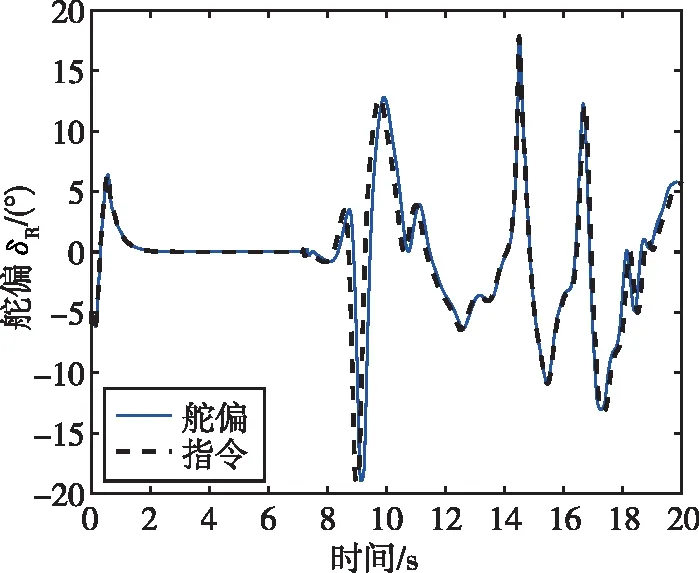
(c)图4 舵面卡死+无RCS重构舵面指令与实际偏转特性Fig.4 Reconfigurable actuator commands and actual performance under actuator stuck without RCS
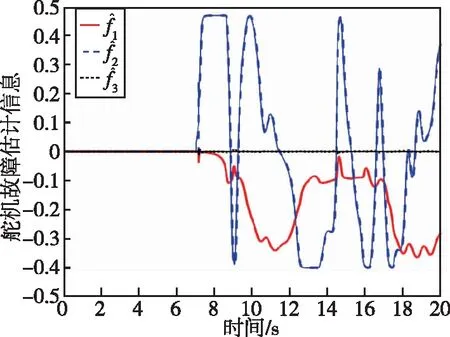
(a)舵机故障估计(1,2,3对应A,B,R)
(b)统一故障力矩估计(1,2,3对应滚转、偏航、俯仰通道)图5 舵面卡死+无RCS重构舵面故障估计特性Fig.5 Reconfigurable actuator fault estimation performance under actuator stuck without RCS
4.1.2 舵面卡死+RCS重构
由于非冗余舵面卡死故障下姿态失稳,考虑RCS辅助补偿,结果如图6~图8所示。具体故障形式为:舵面B在7s处卡死在2°。RCS配置为:1,3控制俯仰通道,5,6控制偏航通道,7,8控制滚转通道。可以看出,各姿态角在舵面卡死后仍然实现了既定控制性能要求,相应RCS配置产生了力矩来补偿故障力矩,使得系统保持稳定。

(a)

(b)
(c)图6 舵面卡死+RCS重构下姿态角跟踪特性Fig.6 Reconfigurable attitude tracking performance under actuator stuck with RCS

(a)

(b)
(c)图7 舵面卡死+RCS重构下舵面指令与实际偏转特性Fig.7 Reconfigurable actuator commands and actual performance under actuator stuck with RCS
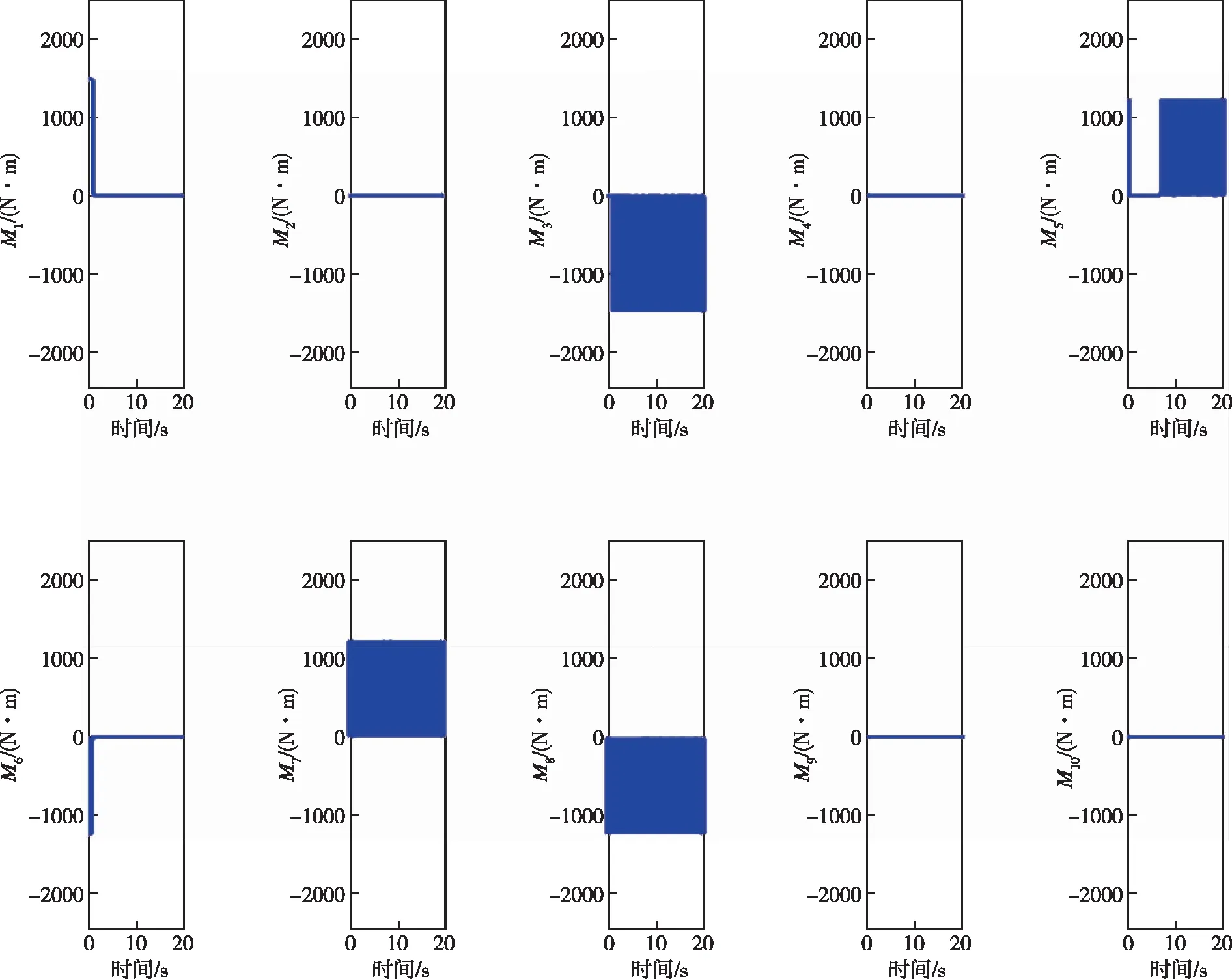
图8 舵面卡死+RCS重构下RCS辅助输出力矩Fig.8 Reconfigurable auxiliary RCS torque output under actuator stuck with RCS
4.2 典型全弹道仿真验证
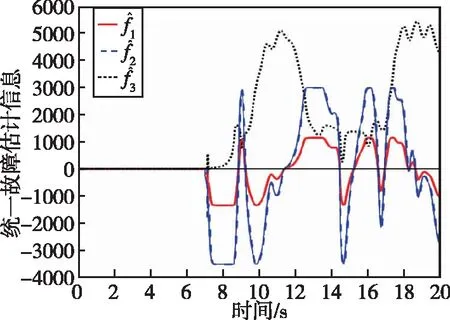
针对某典型弹道剖面跟踪任务,考虑两个舵面发生故障,同时考虑RCS发生两个喷管完全失效故障,结果如图9~图12所示。具体故障形式为:舵面A在飞行100s后发生50%失效故障,舵面R在飞行5s后发生2°恒定偏差故障。RCS配置中的1号推力器在飞行100s后完全失效。可以看出,通过RCS在线重构,各姿态角在舵面故障和RCS故障后仍然实现了既定的控制性能和要求。此外,在舵面有足够能力确保故障下的安全控制时,RCS故障估计信息并未注入到自愈控制中,有效避免了不必要的RCS燃料消耗。
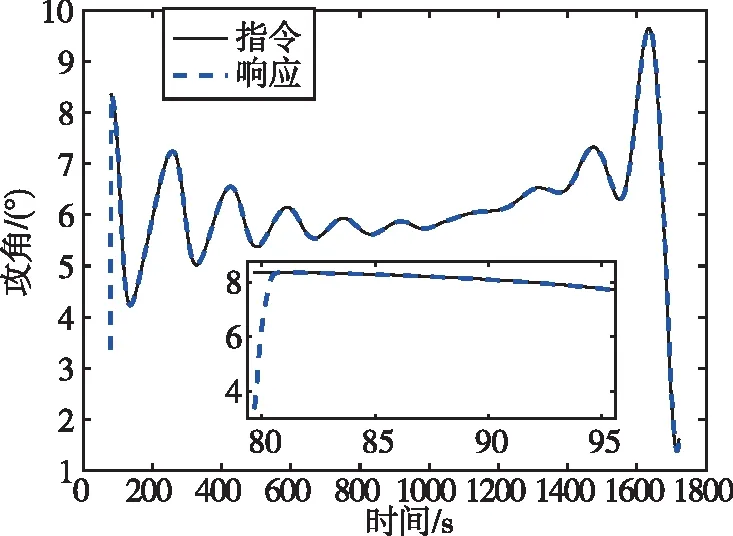
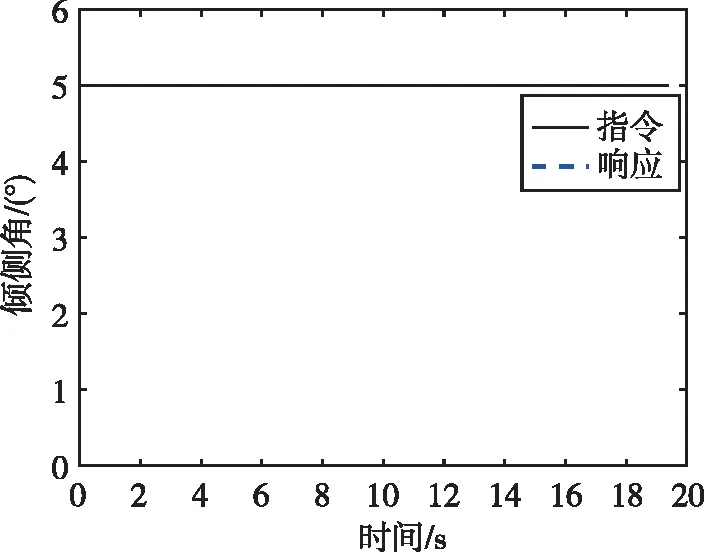
(a)

(b)图9 双舵面故障+双RCS故障下全弹道姿态角跟踪特性Fig.9 Reconfigurable full trajectory attitude tracking performance under double actuator and RCS faults

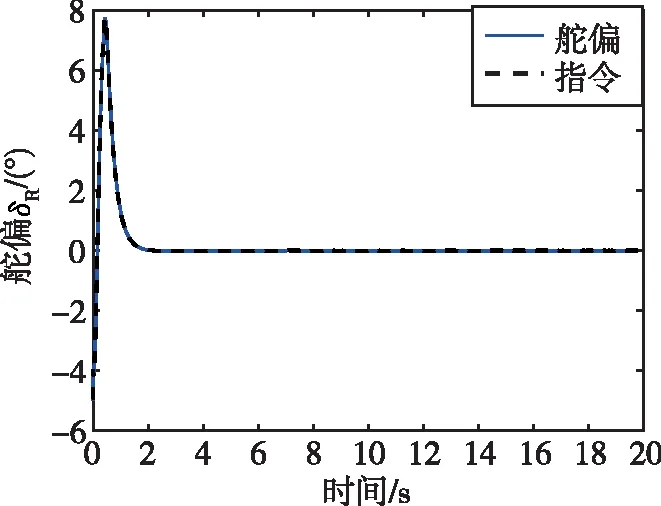
(a)

(b)

(c)图10 双舵面故障+双RCS故障下舵面指令与实际偏转特性Fig.10 Reconfigurable actuator commands and actual performance under double actuator and RCS faults
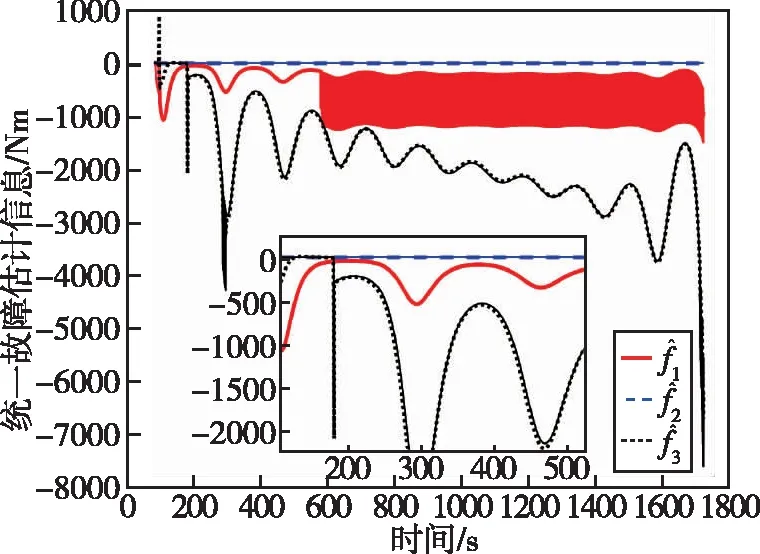
图11 双舵面故障+双RCS故障下的统一故障力矩估计(1,2,3对应滚转,偏航,俯仰通道)Fig.11 General torque fault estimation under double actuator and RCS faults (1,2,3 refer to the roll,yaw,and pitch channel,respectively)

(a)
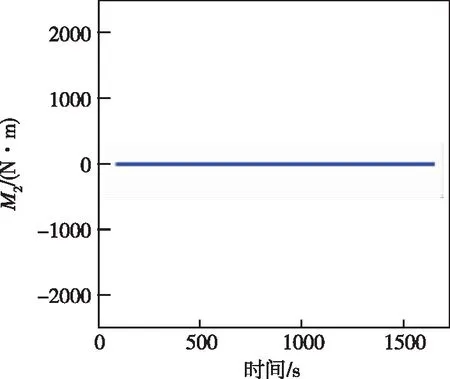
(b)
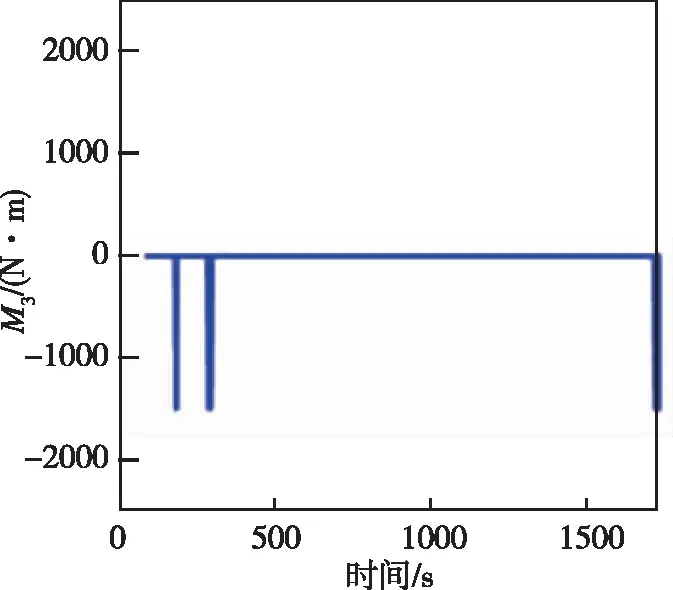
(c)
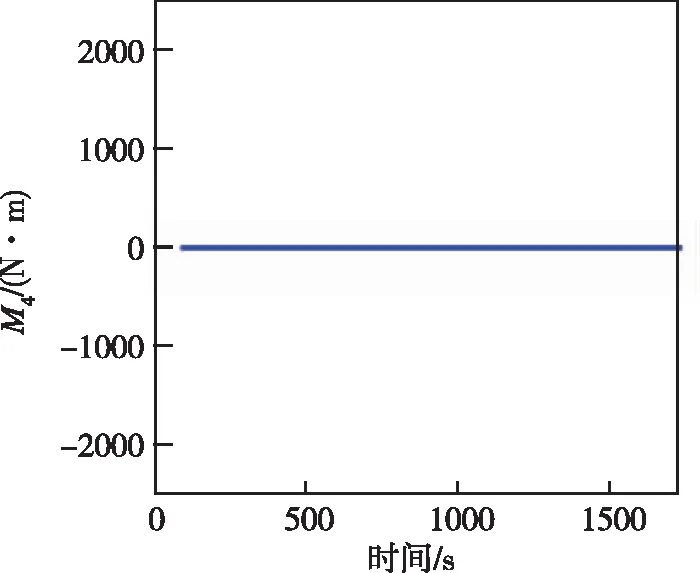
(d)图12 双舵面故障+双RCS故障下俯仰通道RCS辅助输出力矩Fig.12 Reconfigurable auxiliary RCS torque output under double actuator and RCS faults
5 结 论
本文针对稀-稠大气过渡阶段的非冗余舵面与RCS复合故障的飞行器自愈控制方法开展相关研究。所设计自愈控制方法包含了舵面故障补偿控制与RCS重构控制。由于考虑了故障信息的补偿与在线控制重构,虽然在故障发生点附近存在小幅度姿态震荡,最终均能够实现较好的跟踪特性。所设计的故障诊断方法能够有效估计出气动舵面故障信息,分离判定出RCS故障喷管序列,以及复合多模故障带来的统一力矩故障信息。典型特征点和全弹道仿真结果表明,能够实现在0.2s内的高动态智能故障诊断与控制重构,保证了飞行器在多种故障模式下的稳定飞行。总体来看,舵面偏差和失效类故障对飞控系统的影响较小。然而,非冗余舵面的卡死故障带来影响较大,此时RCS配置成为了补偿舵机卡死故障的主要工具。
猜你喜欢
装备环境工程(2022年9期)2022-10-13 05:17:14
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
新技术新工艺(2022年3期)2022-04-02 11:00:16
兵器装备工程学报(2021年12期)2022-01-11 04:30:04
E动时尚·科学工程技术(2019年6期)2019-09-10 07:22:44
智富时代(2019年2期)2019-04-18 07:44:42
电子制作(2018年2期)2018-04-18 07:13:25
科技风(2017年24期)2017-05-30 17:46:16
中国科技博览(2016年23期)2016-12-09 19:29:47
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
