
基于动态参数调谐PMSM低速位置估算方法研究
2023-10-17 05:10:06李文真肖海峰张俊溪
西安航空学院学报 2023年5期
李文真,肖海峰,张俊溪
(西安航空学院 a.车辆工程学院;b.电子工程学院,西安 710077)
0 引言
机械位置传感器被广泛应用于获取永磁同步电机(PMSM)的转子位置信息,以保证伺服控制策略的准确实行。然而,机械位置传感器的使用存在一些问题。首先,从安装位置的角度来看,机械位置传感器通常安装在转子轴上,这会改变电机转子的转动惯量;其次,从安装形式的角度来看,机械位置传感器的连接线和接口电路会增加PMSM硬件驱动系统的成本,并降低系统的可靠性[1];此外,从运行工况的角度来看,温度、噪声和电磁干扰等因素会影响机械位置传感器的分辨率和灵敏度,从而降低位置检测的准确性[2-3]。当机械位置传感器发生故障时,会反馈错误的转子位置,若系统未能及时处理错误的位置反馈信号,可能会引起母线电流和相电流异常,进而导致电机转矩脉动[4],严重情况下,甚至可能导致逆变器过流并引发安全事故。因此,采用软件方法替代机械位置传感器来获取转子位置,可减小硬件系统干扰,显著提高伺服驱动系统的可靠性。反电势观测法是目前较为常见的无传感器控制方法,在反电势观测器的设计中,研究者们致力于解决观测误差的收敛速度、稳定性、抗干扰性等关键问题。许多研究者通过引入自适应、鲁棒性和模糊逻辑等方法,提高了观测器的性能和适用范围。在低速时使用的位置观测方法是基于凸极信号追踪的高频注入法[5]。但当电机运行在低速域甚至零速时,由于反电势幅值较小甚至为零,传统的反电势观测器法会因为信噪比过低而失效。
传统的高频脉振正弦电压注入方法通过带通滤波器和低通滤波器相结合的解调策略来提取位置误差信号。然而,该方法无法同时兼顾位置观测闭环系统的滤波精度和带宽。因此,学者提出了基于双频陷波器级联低通滤波器的位置误差信号提取策略,该策略通过增加环路增益来扩展带宽,从而使得位置观测环具备高带宽和强滤波特性[6]。高频脉振方波注入方法将方波信号注入到估计的d轴中,扩大了电流环和转速环的带宽[7-8]。此外,采用直接解调算法和幅值归一化技术改进了高频脉振正弦注入方法的解调过程,扩大了参数稳定域[9]。然而,与方波信号注入相比,正弦注入方法会降低系统的带宽。
现有方法改进了高频脉振注入法的动态性能,但缺乏对稳定性、带宽和估计精度等影响因素的综合考虑,因此存在一定的局限性。为了克服这些局限性,本文采用了高频脉振方波注入和差分解调法相结合的位置估计策略,通过该策略得到了位置误差函数,并推导出了位置跟踪器的闭环传递函数和零极点;同时,利用根轨迹法对位置跟踪器的参数进行了动态调谐,并结合初始位置所在的不同象限,进一步分析了位置跟踪器的动态收敛过程;最后,将所估算的转子位置应用于矢量控制闭环系统中。
1 高频脉振方波注入与位置误差解调
在估计的d轴注入高频方波信号,该信号可以表示为
(1)

当忽略定子电阻和电动机转速时,可得定子绕组高频电流响应为
(2)
式中:L=(Ld+Lq)/2;ΔL=(Ld-Lq)/2;Φsaw为幅值为1的单位三角波函数,其傅里叶展开式如下
(3)
由式(2)可知,估计的d-q轴电流中同时包含了由高频方波激励产生的三角波响应和转子位置信息,必须消除高频三角波对估计位置误差的影响。由于三角载波的周期等于注入方波的周期且在整个周期内三角载波的斜率在每半个周期斜率正负变化一次,其斜率的绝对值保持恒定。因此,当采样周期ts为注入方波周期th的一半时,可通过差分电流乘以一个单位方波来消除三角载波的影响。
根据公式(2)可以得到估计的d-q轴的差分电流为
(4)
对差分电流进行如下运算
(5)
根据公式(5)可得位置估计误差函数为
(6)

脉振注入法的解调原理总体框图如图1(a)所示。得到位置误差函数ε后采用位置跟踪器解调出位置信息,这里使用的位置跟踪器是二阶锁相环(Phase-Lock Loop,PLL),等效位置跟踪器拓扑如图1(b)所示。在解调过程中,估计d轴的感应电流没有被利用。根据图1(b)可得位置跟踪器的开环传递函数、闭环传递函数和系统特征方程为
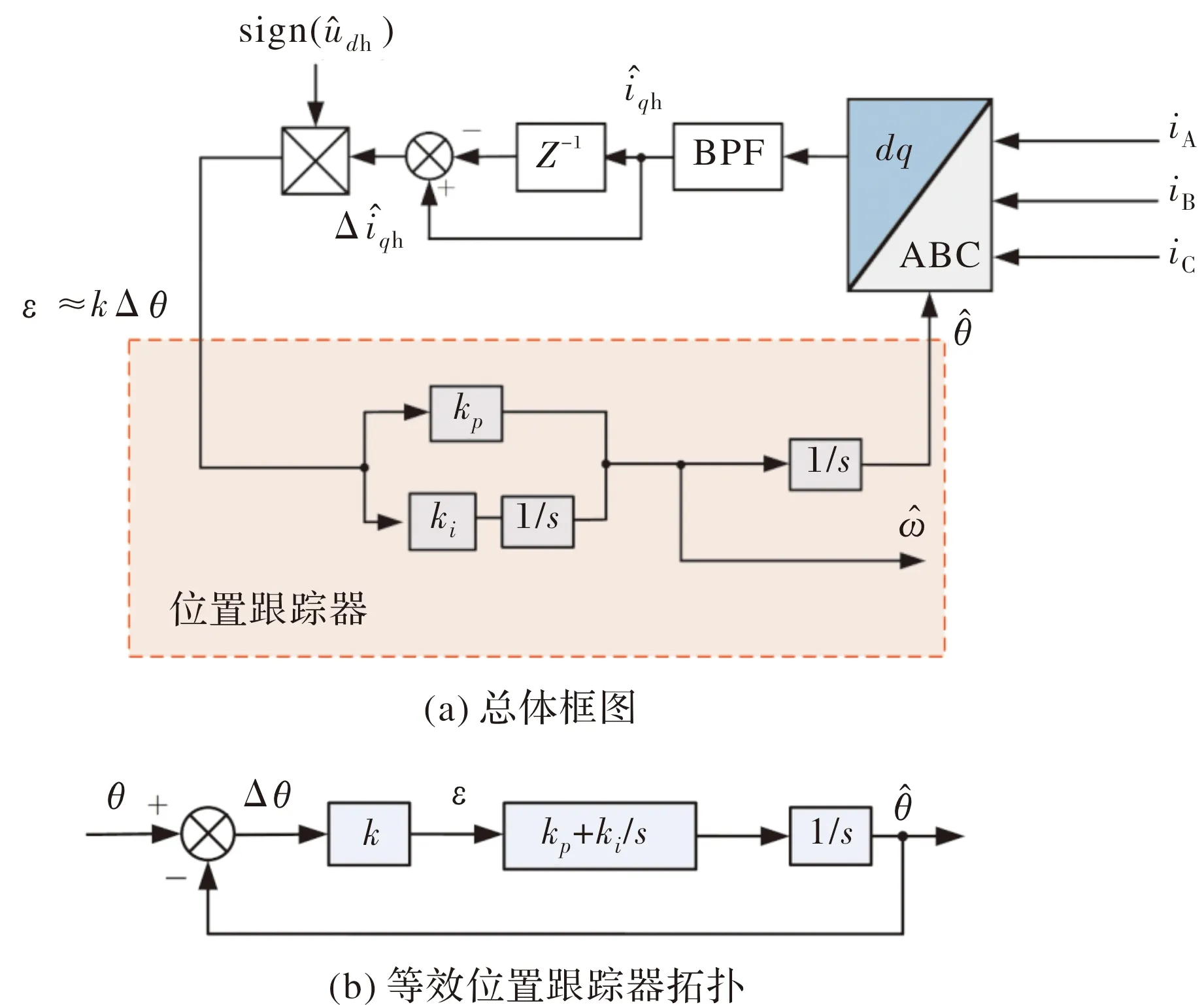
图1 脉振注入法的解调原理框图
(7)
(8)
D(s)=s2+kkps+kki
(9)
式中:kp、ki为PI调节器的参数。
根据式(8)可知位置跟踪器是一个II型系统,位置误差系数k是系统的开环增益。
2 位置跟踪器的参数整定
开环增益已知后,需要利用根轨迹法对位置跟踪器进行参数整定,使其达到最佳的动态性能。同时,根据位置误差的实际函数,需进行收敛过程分析。
开环增益恒定的位置跟踪器的稳态和动态特性只与PI参数有关,根据观测器的闭环特征方程,可构造等效开环传递函数为
(10)
利用公式(10)可画出等效根轨迹,并进行参数整定,将已知的开环增益作为基准值。因此,在以下分析中,k=1。利用MATLAB中的rlocus函数画出位置跟踪器的等效根轨迹,不同PI参数变化范围内的根轨迹图如图2所示。绘制等效根轨迹的具体步骤如下:

图2 不同PI参数变化范围内的根轨迹图
步骤1:令ki=0,根据公式(7)可推出
(11)
根据式(11)可绘制参数根轨迹如图2(a)所示,其中kp的变化范围为[200,400]。
步骤2:将kp看作非零常数,ki为参变量,根据公式(10)绘制参数根轨迹。ki的变化范围为[800,50 000],kp分别等于200、250和300时,对应根轨迹分别如图2(b)、2(c)、2(d)所示。零极点的分布以及零点的位置都会影响系统的动态响应,因此,可以根据根轨迹图选择合适的参数,进行参数整定。使用的原则包括:极点需远离虚轴,极点落在与虚轴成45°区域内,设计零点应接近极点等。
综合考虑以上因素并结合零极点选取原则,根据参数根轨迹可选出一组最优的PI参数:kp=250,ki=31 300,如图2(c)所示。此时系统的阻尼比为0.707,理论上可达到最理想的动态调节性能,这一组PI参数对应的位置跟踪器的闭环带宽为57.8 Hz。
综上所述,位置跟踪器的参数整定流程如下:(1)根据系统的特征建立闭环传递函数、闭环特征方程和等效开环传递函数;(2)根据系统的数学模型,利用rlocus函数绘制参数根轨迹曲线;(3)由符合系统响应要求的零极点分布原则在参数根轨迹曲线中确定合适的PI参数,并计算出系统的阻尼比及闭环带宽。
3 位置跟踪器的收敛性分析
其次,如果不考虑正弦信号的近似sin(2Δθ)≈2Δθ,误差函数的表达式实为ksin(2Δθ)的形式,如公式(6)所示。由于三角函数的周期特性,在Δθ处于不同区域时,ksin(2Δθ)呈周期性变化,并且有多个零点,在零点附近会产生位置跟踪误差。下面分析转子位置在一个周期内的收敛点以及收敛过程,而当转子位置处于其他周期时,其收敛规律是相同的。
由于Δθ有四个可能的值(0,π/2,π,3π/2)使得ksin(2Δθ)等于零,而只有当Δθ为零时,才能得到估计的转子位置与实际位置相同。因此,需要分析当转子位置处于不同初始值时,位置误差sin(2Δθ)的收敛过程。由于本文中提出的两种解调方法中得到的误差系数均大于零,为了便于讨论,在以下分析中假设误差系数k为1,由于误差系数的绝对值不影响收敛过程,这种假设不影响最终的分析结果。


目前,除东部外西北和海上也可属于老油区了。人们为延长老油田(区)的生命,获得更多经济效益而采取了多种手段。
除了以上4个开区间外,将0,π/2,π,3π/2作为特殊的四个转子初始位置。这四个位置在初始状态下就可以使sin(2Δθ)=0,由于电机的实际位置会有小范围的上下偏差,假设偏差的绝对值为p。即使实际位置恰好使得sin(2Δθ)=0,也可以先将符合sin(2Δθ)=0的位置判定为特殊位置,然后对特殊位置增加一个小角度使之落在四个特殊位置附近的邻域内。下面分析四个特殊位置小邻域内估计位置的收敛过程。在α-β坐标下,真实的转子位置在一个电周期内的四个区间分别对应四个象限,真实的转子位置处于四个开区间内的收敛过程如图3所示。根据初始位置的四个区间,以及估计位置的初始值0,可分析出估计位置的动态收敛过程。




图3 真实的转子位置处于四个开区间内的收敛过程

表1 估计位置的收敛特性
4 仿真和实验验证
为了对本文所提方法的有效性进行验证,在MATLAB/Simulink平台搭建了基于脉振注入法的PMSM无位置传感器驱动模型。
同时,搭载实验装置进行实验验证,实验平台由一个两电平功率逆变器驱动的15 kW PMSM组成。采用三菱智能功率模块PM100RLA120驱动PMSM,控制板的核心选取DSP TMS320F28335,利用旋转变压器测量实际转子位置,便于与所提方法得到的估计位置比较。选用霍尔电流传感器HNC-100LT检测三相电流。仿真和实验中使用的PMSM关键参数如表2所示。

表2 PMSM关键参数
高频方波信号被注入到估计的d轴,使用位置估计方法得到的转子位置和转速作为矢量控制的反馈值。延迟时间使用Simulink中的延迟模块来模拟。逆变桥的开关频率为7.5 kHz,注入方波频率为3.75 kHz,注入方波电压幅值为20 V。
所提方法的无位置传感器仿真波形如图4所示,仿真曲线是真实位置和估计位置、位置误差。可以看出电机转速从0上升到300 r·min-1的动态时间持续了0.12 s。所提方法具有良好的动稳态性能,位置估计误差在0.01 rad左右。在0.5 s时将位置跟踪器中预设的kp、ki变负,可以看出,当kp、ki参数变号时,估计位置发散,系统失稳,与理论分析一致。

图4 所提方法的无位置传感器仿真波形
突加负载时的无位置传感器仿真波形如图5所示,仿真曲线分别是真实位置和估计位置、位置误差。可以看出电机转速从0上升到300 r·min-1的动态时间持续了0.11 s,由图5(b)可知,在负载转矩从0变为3 N·m时,位置估算仍保持较好的稳定性,仅在变化瞬间位置估计误差有微小的波动。初始动态调速过程中位置估计误差的最低点为-0.09 rad,当电机转速到达稳态时,位置估计误差的波动范围为-0.005 rad到0.001 5 rad,这表明所提方法在负载变化时仍具有较高的稳定性,且动态时间较短。

图5 突加负载时的无位置传感器仿真波形
所提方法的无位置传感器实验波形如图6所示。电机运行速度为300 r·min-1,从实验结果可以看出,所提出的方法能够良好地跟踪转子位置,并具有较高的检测精度。

图6 所提方法的无位置传感器实验波形
5 结论
本文在保留了脉振方波注入法高注入频率优点的前提下,利用差分解调法得到了位置误差函数,并据此进行了跟踪器的参数整定,实现了系统带宽和稳动态性能的双重提升;其次,利用根轨迹法对位置跟踪器进行了参数整定,使之达到最佳的动态性能;最后,在位置跟踪器参数整定完成的前提下,进行了所提方法的动态收敛过程分析,证明所提方法提高了系统的动态特性和稳定性。
猜你喜欢
太阳能(2022年3期)2022-03-29 05:15:50
太阳能(2020年3期)2020-04-08 03:27:10
当代工人·精品C(2019年2期)2019-05-10 00:13:22
计算机应用与软件(2017年7期)2017-08-12 15:45:55
黑龙江电力(2017年1期)2017-05-17 04:25:05
电镀与环保(2016年3期)2017-01-20 08:15:29
环境科技(2016年5期)2016-11-10 02:42:12
系统工程学报(2015年2期)2015-02-28 19:53:43
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:22
电网与清洁能源(2015年2期)2015-02-28 16:03:12
