
基于无人机技术的输电线路检测和故障定位方法
2023-10-12 07:39刘德帅李勇军罗得表
无线电工程 2023年10期
刘德帅,李勇军,罗得表
(广西电网有限责任公司,广西 南宁 530031)
0 引言
检查电力系统输电线路、杆塔、变压器和其他设备,在满足全球对可持续能源日益增长的需求方面发挥着重要作用[1]。高压架空输电线路是电力系统中的重要资产,需要仔细和频繁地监测,以减少与环境、运行、动物或人类威胁相关的可能故障,并确保其正常运行。然而,由于更紧迫的优先事项、高部署成本或产业政策,监测过程往往被忽视或搁置,这给未做好准备的企业和整个社会带来了困难[2]。在此背景下,基于自主机器人、专用系统和智能机器的机械的发展,有助于应对快速发展的电力行业中日益复杂的挑战,确保高效、经济和安全的维护过程[3]。
对于配电网输电线路的故障检测,国内外学者应用了多种检测算法。其中,文献[4]公开了一种基于无人机激光扫描和雷达技术的输电线路三维建模方法,该技术通过激光扫描和雷达技术实现输电线路故障数据信息的检索,清晰度高,可以应用于多种场合,但实际应用需要的成本高昂。文献[5]提出了一种基于无人机的输电线路检测系统,由于采用了卷积神经网络算法进行优化,其保证无人机摄像头视图覆盖率,能够实现无人机输电线路检测数据信息的多角度检测,也具有一定的技术进步性,但该摄像头无法进行360°全景拍摄图像信息,导致图像处理效率偏低。为此,文献[6]采用了基于无人机红双摄像头进行实地检测,能够通过多种摄像头实现不同位置和输电线路的检测和应用,大大提高了输电线路三维建模和应用能力,红外双目摄像头具有突出的技术优势,但是采用倾斜摄影相机配合红外线采集大量数据传输到后台的处理系统后虽然解决了图像处理效率问题,但系统采用K均值聚类算法(K-means Algorithm,KMA)预测精度较低、数据分类精度低,对输电线的定位信息质量造成严重影响。
针对上述技术的不足,本文采用无人机搭载卫星雷达/机器视觉立体测量技术,针对检测输电线遇到的弧垂、树障和交叉跨越等问题,开展输电线路走廊巡检的关键性技术研究,建立无人机机载三维巡线技术的标准化作业流程,并进行试验区域三维数据采集与分析示范应用,完成项目研发硬件系统和软件系统的现场测试,大大提高了输电线路检测和应用能力。
1 总体方案设计
基于上述技术方案,融合计算机计算技术、大数据分析技术、故障检测技术、图像分析技术和定位技术,能够实现电网输电线运行与维护过程中的数据监控、数据计算、输电线路图像信息处理和故障检测等诸多功能,大大提高了输电线路检测能力,还引入了新型的无人机测控技术[7],大大提高了电网输电线运行能力。电网输电线运行与维护系统设计如图1所示。

图1 电网输电线运行与维护系统设计Fig.1 Design of power transmission line operation and maintenance system
在电网输电线运行与维护系统上,系统工作站与网络服务器处于工作状态(例如CPU使用率、带宽、数据量和功耗等),并每隔一段时间将状态信息发送到边缘节点,每个节点中的传输模块均进行数据压缩和恢复,经处理的输电线图像在节点之间传输[8]。在电网输电线运行与维护系统中,推理引擎组件对需要计算和存储资源的输电线检测数据进行最终处理。数据传输的过程主要包括序列化、数据包传输、解析与反序列化。测绘数据流被推送到云端进行处理,信息化测绘系统在每个节点上分配数据处理,数据主体以轻量级的数据交换格式——Javascript Object Notation(JSON)字符串的格式设置,可以根据数据大小来确定数据包的范围[9]。系统第五代移动通信技术(5G)外部网络通信协议包括短信息服务(Short Message Service,SMS)无线网、通用分组无线业务(General Packet Radio Service,GPRS)网和光纤网,经过路由器和防火墙之后,通过各种网络类型的前置机到达了光端机,经过交换机以及通信发送机传递给空中无人机,无人机收到远程控制指令后按照规定航线进行飞行监测,通过机身自带摄像机进行远处拍摄,并将图像传输至地面工作站中进行分析、处理和评估[10]。根据计算出的输电线故障问题与具体位置,用户可以将执行命令发送到电力系统内网中进行全景可视化,最终生成输电线路故障诊断报告,并派专业的维护人员进行定点检修[11],通过这种方式大大提高了输电线路检测和故障诊断能力。
2 无人机对输电线路检测方法
本文提出的基于电网输电线运行与维护系统允许在网格上定位和操纵无人机,在该研究方法中,无人机使用单目摄像头获取输电线路的视觉图像,将每个图像发送到地面工作站,估计故障位置,并将导航命令发送回无人机,以保持传输线各自的位置。无人机检测输电线路如图2所示。

图2 基于无人机的检测输电线路Fig.2 Detection of transmission lines based on UAV
图2中,无人机位于输电网上方,由操作员控制,外部感知信息通过安装在无人机底部的单目摄像头获取。为了避免阳光直射,两轴手持万向节改变了摄像机的视觉点,以避免传感器饱和[12]。输电线路故障定位过程根据导体几何设计计算摄像机的位置,该系统能够存储压缩图像,并将地理参考信息作为备份和对未来检查工作的支持。无人机飞行导航策略包括2个阶段[13]:电力线检测和电气塔检测。但本文中无人机视觉定位系统专注于第一个目标。
在具体应用中,比如输电线路检测后如何定义和检测故障,其中导线的安装弧垂与地区电力部门规定的弧垂允许误差不可超过±5%。树障是通过测量树木与线路带电部分的距离,即树木净空,由此来判断树障的危急程度。输电线路穿越房屋、建筑、果树、林木和河流等物体,称为跨越允许误差,不可超过±8%,通过这种方法能够提高输电线路检测和故障诊断能力。
因此,当无人机靠近电气塔时,系统将被禁用,切换到手动模式,最高速度为75 km/h。然而,本文将速度限制为25 km/h,以增加电力线检测的概率并减少模糊效果。无人机的自主飞行时间为30 min。如果无人机检测到电池电量低,车辆将在2种飞行模式之间进行选择:着陆(尝试使无人机直线下降)或返回发射(无人机从当前位置导航到初始位置上方悬停),具体取决于到起点的距离[14-15]。关于无人机中嵌入式控制器和图像处理器内部的总体电路如图3所示。
图3中,部署的无人机有一个飞行控制器(Erle Brain 2型,配备900 MHz四核ARM Cortex-A7 CPU核心处理器),该控制器有一个飞行控制单元(提供基本飞行控制的计算机)和一个配套计算机(负责图像处理和图像广播的计算系统)。此外,控制器具有惯性测量单元、集成高度表和嵌入式卡尔曼滤波器,用于处理信号。无人机还有一个绝对误差为1 m的全球卫星导航天线。使用SJ4000 Turnigy HD ActionCam型号[16]1080P全高清摄像机采集视觉数据,在监测模式下可视摄像头分辨率为1 920 pixel×1 080 pixel。监测提取的输电线路信息存储在16 GB的内部存储器中,并以数据包的形式定期发送到配套计算机,以防止出现问题。为了执行这一过程,无人机配备了基于发射机/接收机(433 MHz)和用于遥测操作的无线连接的通信系统,以及用于图像传输的发射机/接收机(5.8 GHz)[17]。
下面介绍拟定基于无人机技术的输电线路检测和故障定位方法,主要包括3个阶段:图像预处理、传输线检测和无人机空间定位。拟定方法的具体过程如图4所示。

图4 拟定方法的具体过程Fig.4 Specific process of developing the method
图4中,首先是无人机拍摄到的输电线路图像预处理阶段,摄像镜头畸变和噪声直接干扰采集的图像,降低输电线路的故障定位效率。传统的摄像机标定方法估计内外参数和失真系数,而本文提出的数字信号处理算法降低了噪声,纠正了图像缺陷,消除了模糊失真,保证了输电线路的检测[18]。另一方面,每个预处理的输电线路图像都有几个与传输网格无关的额外对象。必须衰减或移除场景中的这些对象,否则,系统必须增强与传输线相关的像素,以将三相传输线与图像背景隔离。为了实现这一目标,图像将接受各向异性高斯滤波,这将改善传输线的纹理质量,并删除不相关的数据,而不考虑线在图像中的位置及其长度和斜率[19]。
滤波器组包括一个边缘滤波器,在6、12或24个方向,根据计算时间和图像大小选择方向。使用索贝尔检测器对每个滤波过程中输入的原始输电线路图像进行滤波,以增强边缘效应,并将其编码为二值化版本。该系统提供了一个带有6、12或24个二值化图像的张量,输电网中的固定模式,主要是在其输电线上,是对称几何设计。该系统在每个二值化图像中查找与导体具有类似特征的图案,在这项工作中,无人机使用近似直线的导体飞越输电网,没有中断,霍夫(Hough)变换函数可以成功地解决这一问题,因为该方法可以识别二值化图像中存在高概率找到直线的部分。
Hough变换将一条直线定义为一组共线点,将所有检测节点映射到正弦函数的函数空间,由下式定义[20]:
f:(x,y)→p=xcos(θ)+ysin(θ),
(1)
式中:(x,y)表示特征点位置,p和θ分别表示输电线与坐标中心的垂直距离以及该直线法线与X轴之间的角度。
式(1)为Hough变换的理论研究,其中不同参数的应用过程取决于输电线与坐标中心的垂直距离以及该直线法线与X轴之间的角度,在设置时,忽略了关键性影响因素,保留主要因素。在这种情况下,该算法返回至输电线数据集,其中包含满足与每个二值化图像的传输网格几何设计相关的所有输电线,然后使用模糊C均值算法合并与同一直线相关的所有测量值。
3 无人机对输电线路故障定位方法
输电线路检测使用几何设计和均匀性在每个图像中建立坐标轴。在这一阶段,目的是找到一组具有3条或3条以上的直线,以满足传输线的平行度和等距离。使用Hough变换提供的参数p和tan(θ),但是地形起伏和相机倾斜会干扰等距线识别过程,本文设计了无人机使用图像正射校正技术。图像正射校正过程如图5所示。

图5 图像正射校正过程Fig.5 Image orthographic correction process
图5中,γ是相机围绕X轴的拔模角度,Ψ表示无人机视野,d1和d2分别表示中心输电线路和左右两侧输电线路之间测量的扭曲距离,d′1和d′2分别表示当相机平面与输电线路平面平行时,中心输电线路和左右两侧输电线路之间测量的真实距离。
输电线路图像正射校正过程利用不同角度和已知距离之间的几何关系校正不利影响,其中每个参数之间的关系描述如下[21]:
(2)
式中:h表示无人机距离输电线参照高度,α1和α2表示输电线实点和焦点之间的角度。
式(2)中,设置数据信息时,在输电线路图像正射校正过程中,通过利用不同角度和已知距离之间的几何关系校正,实现不同数据信息参数设置。
无人机在输电线路的参照高度h处采集多幅图像,将每幅图像进行特征点提取,并在图像中直接测量其之间的距离,便于接下来的基于视觉数据的故障定位[22]。通过应用将测量距离、参考距离和参考高度与相机高度关联的反向线性函数来确定真实高度H,其定义式为[23]:
(3)
式中:D为输电线路图像中以像素为单位的参考距离。在离线模式下,建立参考坐标轴,可以计算相机相对于中心输电线的估计位置,即:


综上所述,通过测量定位参数确定无人机的具体位置与输电线之间的上下关系,采用该研究设计的无人机故障定位方法可在不同天气下正常运行,满足了实际应用的需求。在具体应用中,上述各个变量在获取时,通过理论设置和角度测量,为理论上的参数设置,数据信息获取通过不同参数数据采集模块实现。
4 实验与分析
为了检测基于无人机技术的输电线路检测和故障定位方法的可行性与有效性,进行实例测试。首先,采用Matlab仿真软件搭建实验平台,搭建过程中将线路综合监测数据信息、线路状况分析信息和决策分析与支持作为底层数据,通过数据库以及交换机传递该数据信息。实验架构[25]如图6所示。
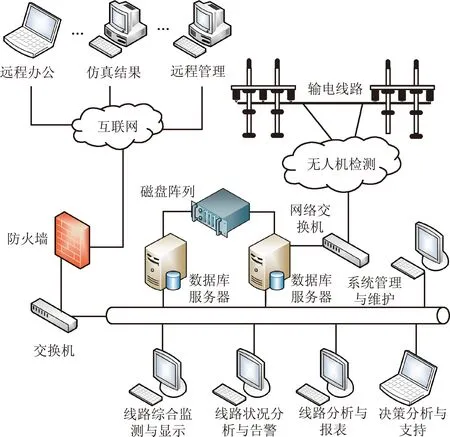
图6 实验架构Fig.6 Experimental architecture
图6的模拟设计中,上层管理中心接收上层数据信息的模拟数据信息,通过数据库服务器存储这些数据信息,并将这些数据信息进行仿真与管理,大大提高了数据信息的计算、监控能力。本次实验采用的实验数据为故障检测装置对郊外多个输电线塔中间段输电线路运行状态进行的检测,得到2022年1—3月输电线路运行的数据情况。输电线路实验数据如表1所示。
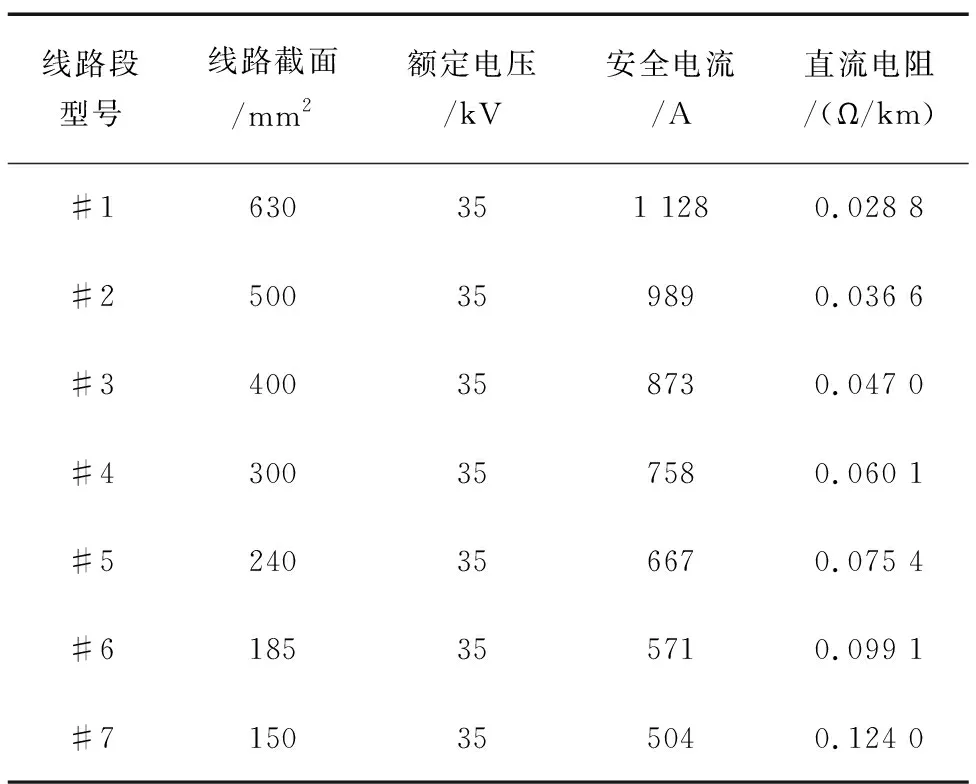
表1 输电线路实验数据Tab.1 Experimental data of transmission lines
表1描述了不同路段的输电线路额定电压、安全输送电流等参数,将上述实验数据作为实验数据库,接着进行实验操作。首先对输电线路图像噪声过滤处理的有效性进行测试,有效性指标是指在规定检测时间9:00—18:00对#3段输电线路进行检测,在Matlab仿真软件中,构建参数数据信息模型,然后将不同的参数代入到数据信息模型,通过Matlab仿真软件搭建输电线路,其将线路综合监测数据信息、线路状况分析信息和决策分析与支持都输入到数据模型中,仿真过程是通过将不同的数据信息从数据库服务器提取出来,进而对这些数据信息进行存储,通过图像去模糊、Hough变换、正射影像校正、估计距离和输电线检测等多种方法处理。
采用文献[4]方法与本文方法得到不同的图像信息参数,文献[4]方法为利用相模变换把三相电路中互相耦合的向量转换成独立量,进而获取对应的电流模行波速度和引起短路故障的电流模,完成故障行波的生成以及行波速度分析。通过过滤得到噪声波动变化,通过Matlab软件进行仿真得到对比示例,文献[4]方法仿真结果示意如图7所示。
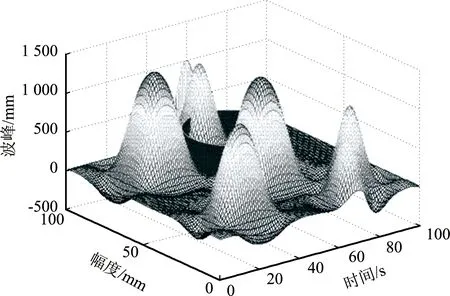
图7 文献[4]方法仿真结果示意Fig.7 Schematic diagram of simulation results of the method in reference [4]
在仿真过程中,将分析的时间、监测数据信息、线路状况、波峰和幅度等反映线路综合监测数据信息、线路状况分析信息和决策分析数据等不同的数据信息作为输入数据信息,然后通过文献[4]仿真结果示意,构建相模变换模型,将三相电路中互相耦合的向量转换成独立量,进而获取对应的电流模行波速度和引起短路故障的电流模,实现故障行波的生成以及行波速度分析。再根据戴维南定理对构建的等效电路图进行计算,通过拉普拉斯对等效电路实现电路换算,进而实现了输电线路故障智能定位。由图7可以看出,三维图像在不同函数曲线中处于起伏状态比较明显,得到图像噪声变化表现不平坦,图像处理不平滑,这是因为架空输电线路故障能力差,图像预处理效果不好,传输线检测和无人机空间定位能力不好。
通过在电网输电线运行与维护系统时,系统工作站与网络服务器可以对系统的工作状态具有一定的技术意义,在输电线路检测时,每个节点中的传输模块均可以进行数据压缩和恢复,大大提高了数据信息处理能力和应用能力。因此,该方法虽然实现了输电线路故障智能定位,但是图像处理效果较差。实验结果表明,所提方法能够提高定位效率和图像处理能力。本文研究方法的仿真图如图8所示。

图8 本文研究方法的仿真图Fig.8 Simulation diagram of the research method
在图8中,波峰、幅度可以通过不同图像处理算法函数代入得出,时间表示图像噪声矩阵函数,Matlab三维图像在不同函数曲线中处于起伏状态,在仿真过程中,将输电线路检测到的数据信息输入到仿真图中,比如输电线路段、型号、额定电压、安全电流、直流电阻、无人机距离输电线参照高度、输电线实点和焦点之间的角度、拔模角度、无人机视野、中心输电线路和左右两侧输电线路之间测量的扭曲距离、加权平均值、测量度方差和空间位置测量值等多种反映输电线路正常工作的参数数据信息导入到式(1)~式(8)中,在Matlab仿真软件中计算上述数据信息,将反映该上述仿真结果的关键数据信息进行仿真。
图7和图8可以证明,本文方法得到的图像噪声变化比较平坦,图像处理看起来比较平滑,这说明通过该方法进行图像预处理、传输线检测和无人机空间定位后架空输电线路故障能力处理较好,图像预处理效果好。使用Sobel检测器对每个滤波过程中输入的原始输电线路图像进行滤波,以增强边缘效应,体现了其优质的图像过滤处理性能。
通过将本文系统所用算法与文献[5]采用的卷积神经网络优化YOLOv3模型和文献[6]K-means聚类算法进行性能比较,采用平均精度O作为评价指标。实验进行模型训练时采用以10张图像为一个训练批次,已知当进行20 h的训练后,其损失函数不再下降。利用这3种方法对2 GB的输电线路图像进行计算故障定位,进行6次实验的平均精度结果如表2所示。
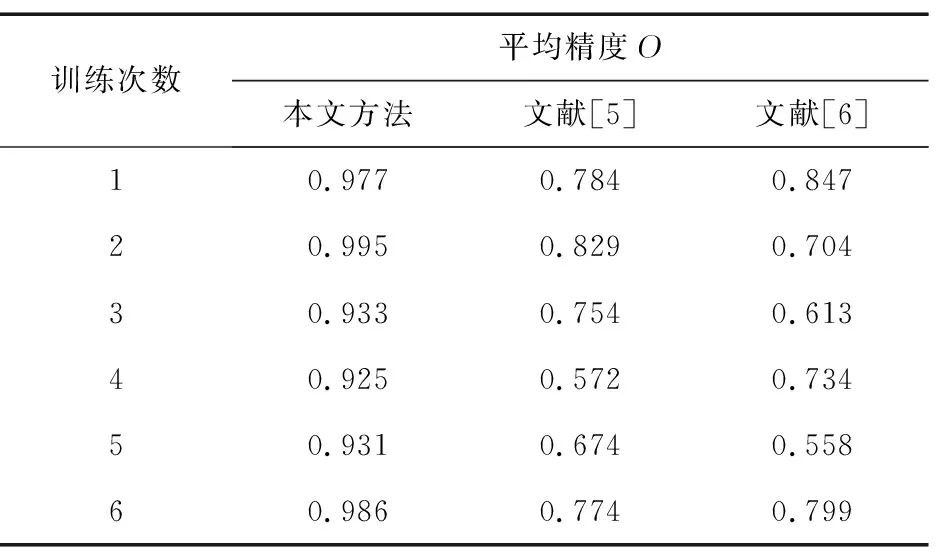
表2 不同算法的平均精度Tab.2 Average accuracy of different algorithms
从表2可以看出,多次试验算法得到平均精度不同,无法清楚地看出优劣。为此,该研究将实验结果输入至仿真软件中,得到实验结果对比如图9所示。
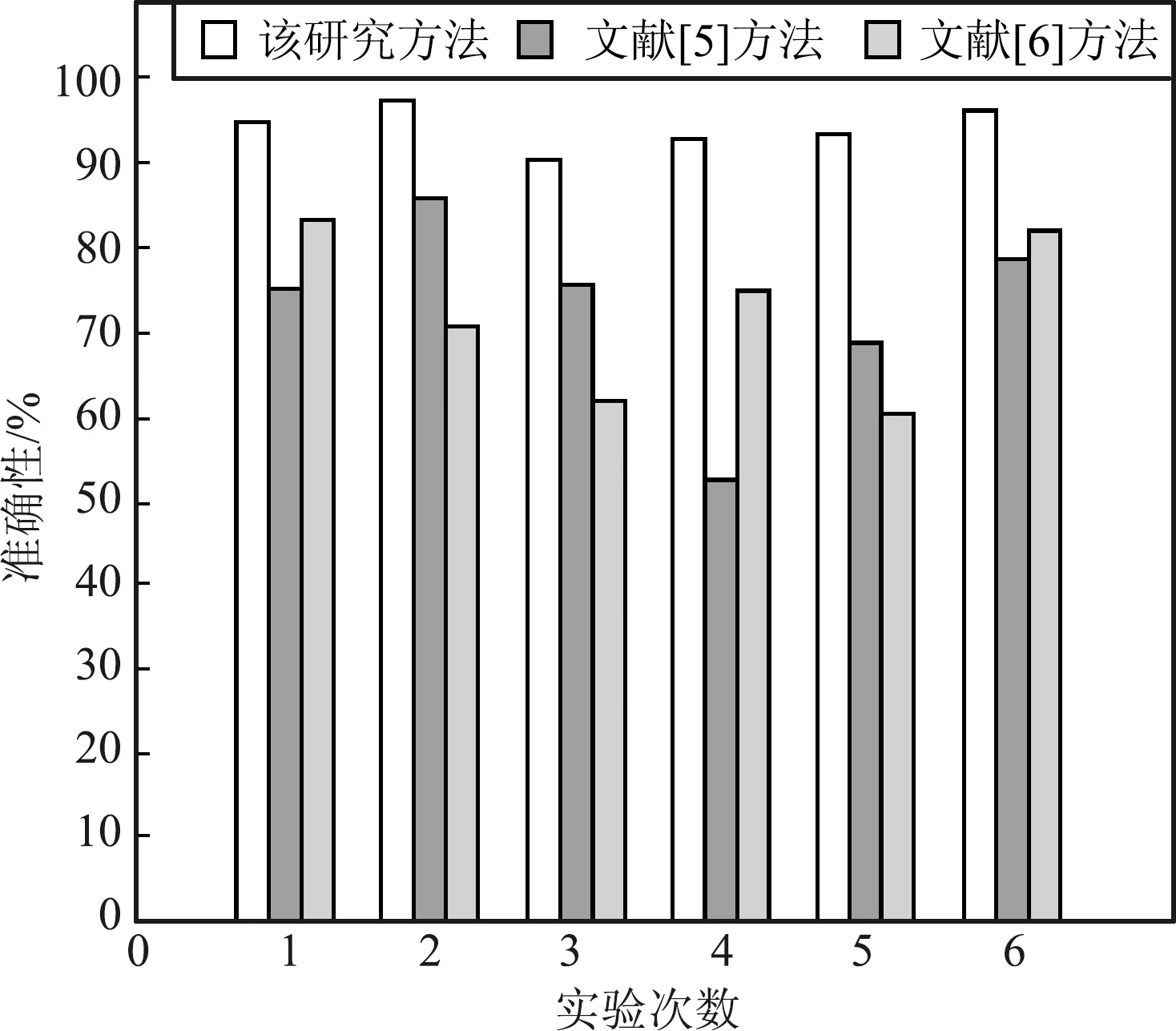
图9 实验结果对比Fig.9 Comparison of experimental results
由图9可知,本文方法在进行输电线路运行故障定位的准确性测试时,故障定位的准确性均在90%以上,在第2次实验时达到99.5%,远远高于其他2种定位算法,体现了本文算法的适用性。通过上述验证,说明本文方法具有一定的技术意义。
5 结束语
轨道交通是目前人们出行的重要交通工具之一,其故障定位效果直接影响到人们的正常出行与人身安全。本文采用无人机搭载卫星雷达/机器视觉立体测量技术,针对检测输电线遇到的弧垂、树障和交叉跨越等问题,开展输电线路走廊巡检的关键性技术研究,建立无人机机载三维巡线技术的标准化作业流程,并进行试验区域三维数据采集与分析示范应用,完成项目研发硬件系统和软件系统的现场测试。采用在线定位技术不但可以提升故障的定位精度,还可以降低由于离线定位造成的无人机供电系统损伤问题的发生。但在测试中发现,本文方法在进行图像信息传输时存在一定的延迟,未来会深入研究出现该问题的原因。
猜你喜欢
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
建材发展导向(2019年5期)2019-09-09
电子制作(2018年12期)2018-08-01
知识经济·中国直销(2018年3期)2018-04-12
通信电源技术(2016年3期)2016-03-26
学习月刊(2015年1期)2015-07-11
电测与仪表(2015年2期)2015-04-09
电测与仪表(2015年2期)2015-04-09
电测与仪表(2014年21期)2014-04-04
