
基于背包激光雷达构建天然林蒙古栎胸径-树高模型
2023-10-12 07:20:16杨军王帆宋仲禹
森林工程 2023年5期
杨军,王帆,宋仲禹*
(1.黑龙江省林业和草原调查规划设计院,哈尔滨 150040;2.东北林业大学 林学院,哈尔滨 150040)
0 引言
森林资源是人类赖以生存的重要自然资源之一,惯有“地球之肺”的美称,是全球气候变化的晴雨表,且和全球生物多样化存在着密切的关系,也是生物多样性的基础[1]。森林空间结构信息在森林生态研究、资源监测等方面具有重要作用,是陆地生态系统研究的重要参数,尤其在提高叶面积指数、森林生物量及进行森林生态系统碳循环、森林生长演替等动态过程的研究方面有重要意义[2-3]。而且,森林资源是全球资源的重要组成部分,具有缓解全球气候变化及促进社会经济发展的重要作用,对于构建良好生态环境有着独特意义[4]。
为了有效地进行森林资源的管理,调查掌握森林资源信息是非常必要的。传统的森林资源调查通过人工每木检尺来实现,劳动强度大、效率低,很难获得准确并且具有实际应用意义的森林结构参数[5],有明显的局限性。在过去20年中,激光扫描技术作为一种林地信息收集、提取参数[6]与模型构建[7]的重要手段,在森林资源调查中得到了广泛的应用[8],激光雷达扫描可以高效地获取大量的森林资源信息,这样节约很多的资源和成本,且对应的工作效率也明显地提高,有利于提高研究和应用水平。激光扫描技术可以在一定程度上取代人工作业,对森林进行高精度、快速和无损数据收集的特点,极大地提高了森林信息采集的效率和精度[9]。并且激光扫描技术作为一种高科技应用科学,对植被的空间结构与地形具有较强的检测能力,已成功应用于森林参数的测量和反演,成为森林调查的重要手段[10]。激光雷达遥感作为主动遥感技术可以有效穿透森林,在获取森林高度和森林垂直结构参数方面有着其他光学遥感无法比拟的优势[11-12],很多研究基于机载激光雷达(Airborne laser scanning,ALS)与地基激光雷达(Terrestrial laser scanning,TLS)成功提取了森林垂直结构及水平分布参数和单木结构参数[13-17]。例如,骆钰波等[26]基于TLS数据提取了亚热带山区森林的胸径和树高,结果显示提取胸径的决定系数(R2)为0.996,均方根误差(RMSE)为0.66 cm;提取树高的R2为0.972,RMSE为0.92 m。黄旭等[18]基于BLS提取了人工落叶松的胸径和树高,研究显示胸径提取结果明显大于树高的提取结果,胸径平均提取精度为94.51%,树高平均提取精度为80.27%。
蒙古栎(Quercusmongolica),主要分布于东北地区,是我国的主要用材树种和东北次生阔叶林中的主要组成树种,有着极高的经济价值与生态效益,但是长期以来一直未受到重视。人们对蒙古栎的生长特性尚未全面的研究,且大部分蒙古栎在现实林分中多生长不良,长期以来一直被作为改造的对象,导致蒙古栎未能充分发挥其多种效益。因此,为了准确了解蒙古栎的生长状况,促进蒙古栎林的合理经营,必须构建完善的蒙古栎生长模型。
目前机载激光雷达和地基激光雷达在林业方面的应用和研究已经趋于成熟,但是这2种激光雷达在进行外业活动采集数据的过程中成本十分高昂,且数据处理较为繁琐,因此在小范围样地调查时并不是十分适用。背包激光雷达作为一种新型便携的激光扫描仪十分适用于样地尺度下的调查,但在林业方面的应用还比较少,因此,准确评估利用背包激光雷达提取单木因子的精度是亟待解决的问题。
综上所述,本研究使用背包激光雷达点云数据提取蒙古栎的单木因子,在提取精度满足生产需求的情况下进一步利用提取的因子构建蒙古栎胸径-树高模型。以期为背包激光雷达在样地尺度下的应用提供进一步的实践基础,同时为蒙古栎生长模型系统的构建做出一定贡献。
1 研究区概况
研究区位于黑龙江省佳木斯市孟家岗林场(130°32′~130°52′ E,46°20′~46°30′ N),地处于完达山西麓余脉,地貌主要为低山丘陵;坡度平缓,介于10°~20°,平均海拔约250 m。孟家岗林场属于东亚大陆性季风气候,春季干旱少雨,秋季易霜冻,夏季短暂且温暖湿润,冬季持久且寒冷干燥。最高气温可达35.6 ℃,最低气温为-34.7 ℃,年均气温约为2.7 ℃。无霜期大约120 d,年平均降水量550~670 mm。土壤类型主要为典型暗棕壤,还有少量草甸暗棕壤、潜育暗棕壤和原始暗棕壤;除此之外,还存在草甸土、白浆土、泥炭土以及沼泽土。该林场以人工林为主,占整个施业区面积的2/3,天然次生林约占1/3,森林覆盖率为81.7%。
2 数据收集
2.1 野外样地数据调查
2021年4月,在孟家岗林场的蒙古栎天然林中设置了3块固定标准样地,样地面积均为0.09 hm2(30 m × 30 m)。在设置的标准样地的中心点用GPS进行定位,定位精度为3 m。每木检尺工作包括测量每株树木的树高、胸径、冠幅和第一活枝高,并且在样地中记录每棵树的相对位置。采用超声波测高器来测量树高,用胸径尺测量样地内所有胸径大于5 cm的树木,用测距仪来测量冠幅,用50 m皮尺确定样地内树木的相对位置,共计测量244株活立木。样地信息见表1。

表1 样地信息统计表Tab.1 Statistical table of sample plot information
2.2 背包激光雷达数据采集
每木检尺工作结束后开始利用背包激光雷达(北京数字绿土有限公司)采集样地的点云数据。由于样地面积较大,为了保证能较为全面地获取样地内的点云数据,采用了黄旭等[18]的路线规划,如图1所示。最终采集到的点云数据,如图2所示。

图1 样地扫描路径规划图Fig.1 Map of scanning route planning

图2 样地点云示意图Fig.2 Schematic diagram of a sample plot point cloud
3 研究方法
3.1 点云数据预处理
在Lidar360软件中加载扫描获得的.ply格式的样地点云数据以及.xyz格式的样地采集路线行走轨迹,根据行走轨迹获取样地在点云数据中的大致位置,从而对点云数据进行裁剪,精确获取样地内的点云数据。采用高度阈值法[19]对样地点云进行去噪处理,随后根据渐进加密三角网滤波算法[20]对地面点进行分类。利用分离出的地面点生成数字高程模型从而获得归一化的点云数据。
3.2 提取单木因子
利用归一化的点云数据在Lidar360软件中进行单木自动分割。但是这种自动分割方法得到的单木点云数据易受低矮灌木干扰,并且连株树木易被分割为同一单木,对后续数据处理造成困难。因此利用软件的单木点云编辑功能对分割后的点云数据进行二次处理。在2D视窗中提取一定范围的树木剖面,对样地数据逐片排查进行编辑。多株树木分割为一株的用创建单木功能进行再分割;一株树木被分为多株而过分割的,用合并单木功能重新划分为一株单木。对单木与周围灌木因为距离过近而分割为一株单木,影响胸径提取精度的,用创建单木功能将多余的灌木部分分割出来并使用删除单木功能将其删除;对低矮灌木成片生长被分割为多株单木的,用删除单木功能进行修正。处理后单木分割结果如图3所示。最后从修正后的单木点云数据中截取胸径处上下5 cm厚的点云进行胸径的提取。单木点云中Z轴上的最大值与最小值之差定义为树高。
3.3 构建胸径-树高模型
3.3.1 基础模型
根据马武等[21]对天然蒙古栎单木生长模型的研究结果,从中选取了5种胸径-树高模型作为备选模型。模型的具体形式如下。
H1=a+bD+cD2。
(1)
H2=1.3+a(1-e-bD)c。
(2)
H3=1.3+a(1-e-bDc)。
(3)
H4=1.3+aDbDc。
(4)
(5)
式中:H为树高,m;D为胸径,cm;a、b、c分别为模型的参数。
3.3.2 模型评价与检验
对本研究所用的数据进行随机抽样,抽出75%的样本用作建模数据,剩余25%样本用来进行模型检验。利用R2和RMSE评价模型的拟合能力。R2越大,RMSE越小,则证明模型的拟合效果越好。利用独立样本对模型进行检验,选择平均相对偏差绝对值(RMAE)、平均绝对偏差(MAE)、预估精度(forecast precision,FP,式中为Fp)作为评价指标。Fp越大,MAE、RMAE越小,模型的预测效果会越好[22]。模型的拟合与检验都是在R软件中实现的。预估精度(Fp)计算方式如下。
(6)

4 结果与分析
4.1 单木因子提取精度
表2展示了胸径与树高提取结果的统计信息。为方便后续进行建模,将提取结果按照3∶1的比例随机划分为建模数据和检验数据。图4展示的是3块样地中蒙古栎点云数据提取出的胸径和树高与实测数据之间的回归关系。从总体上看,所有的散点都集中在1∶1参考线的附近,证明提取出的胸径和树高与实测数据之间有着极强的相关性,R2最低为0.925,最高为0.957。胸径的提取精度整体上优于树高的提取精度,这是由于背包激光雷达获取冠下点云信息的能力大于获取冠上点云信息的能力造成的。样地1的胸径和树高的提取结果都最差,这可能是由于样地1的密度最大,导致收集到的点云数据质量较差,因此提取效果受到了一定影响。

图4 胸径与树高提取结果Fig.4 Extraction results of DBH and tree height

表2 胸径树高提取结果Tab.2 Extraction results of DBH and tree height
综上所述,结果显示提取胸径与实测数据之间的R2为0.930~0.957,RMSE为0.697~0.897 cm;提取树高与实测数据之间的R2为0.925~0.951,RMSE为1.479~1.683 m。以上结果表明利用背包激光雷达点云数据提取蒙古栎的胸径和树高与实测数据之间相关性极高。证明可以利用背包激光雷达点云数据对蒙古栎的胸径和树高进行高精度的提取。这为后续建立蒙古栎胸径-树高模型提供了合理的数据。
4.2 蒙古栎胸径-树高模型拟合
利用R软件对蒙古栎的5个胸径-树高备选模型进行拟合。表3为各模型的拟合结果,从总体上可以看出各模型参数估计值的标准误差都很小,表明5个模型的稳定性很好,各参数的P均小于0.01,证明参数均具有显著意义。从模型的拟合优度方面来看,模型的R2均高于0.70。其中模型1的R2最高,为0.727,RMSE最低,为2.044;模型4的R2最低,为0.719,同时RMSE最高,为2.067。因此各模型拟合效果由优到差排序为:模型1、模型3、模型2、模型5、模型4。
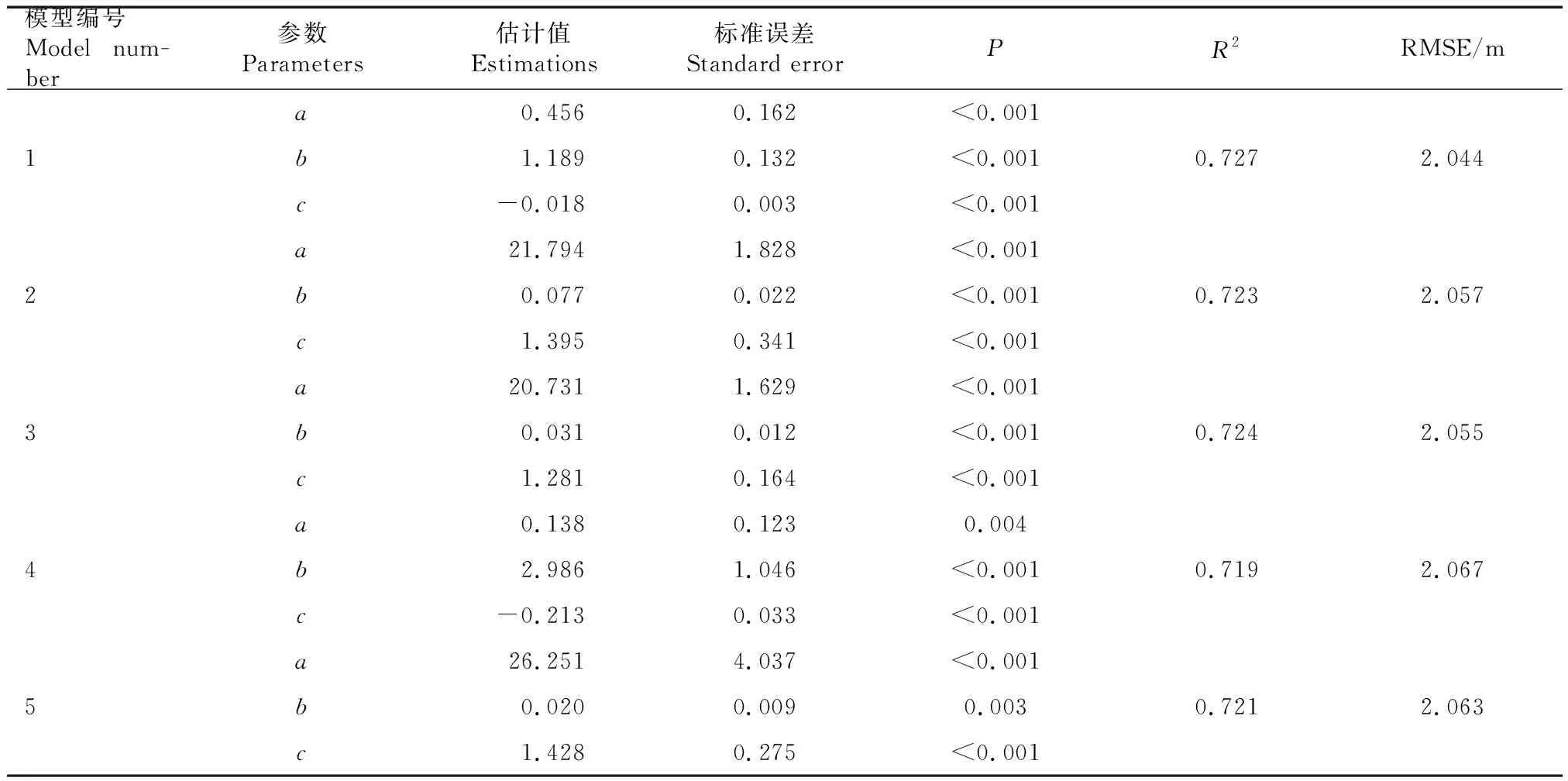
表3 模型拟合结果Tab.3 Model fitting results
4.3 蒙古栎胸径-树高模型检验
根据模型的参数计算结果,利用R软件在独立的检验数据上进行模型检验,分别计算各模型的MAE、RMAE和Fp模型的检验结果,见表4。从表4可以看出,各模型的预估精度均高于98.37%,表明模型的预测效果良好。从模型的检验指标来看,模型1的结果最好,MAE和RMAE最低,分别为1.524和0.101,模型4的结果最差,3项检验指标均小于其他4个模型,MAE和RMAE最高,分别为1.540和0.104。因此各模型的检验结果由优到差排序为:模型1、模型3、模型2、模型5、模型4。

表4 模型检验结果Tab.4 Model testing results
5 讨论与结论
5.1 讨论
以黑龙江省佳木斯市孟家岗林场为研究区域,基于背包激光雷达点云数据提取了蒙古栎的胸径和树高。结果显示所提取的胸径和树高与实测数据具有很高的相关性,R2均高于0.925。其中胸径的提取精度整体上要高于树高的提取精度,R2为0.930~0.957,RMSE平均为0.792 cm;这与赵琦等[23]对桉树胸径提取的研究结果相一致。通常林下的灌木杂草较多的情况下,胸径的提取结果会受很大影响。本研究数据采集时间为4月份,此时样地内杂草都处于枯萎状态,并且林下的灌木较少,因此提取的胸径精度较为稳定。树高的R2为0.925~0.951,RMSE平均为1.548 m;这与黄旭等[18]研究利用背包激光雷达提取落叶松单木因子所得出的结论基本一致。但是本研究中树高的提取结果要优于黄旭等[18]的研究结果。为了避免由于树冠互相遮挡导致的上部树冠点云不完整,特意选择在4月份采集数据,此时蒙古栎还未展叶,因此树冠上部通视良好,能够收集到较为全面的单木点云,这在一定程度上提高了蒙古栎树高的提取精度。在未来的研究中,若能结合背包激光雷达和无人机激光雷达各自的优势,认为树高的提取精度将能大幅提高。
本研究选取的样地位于山坡顶部的天然林中,林内无林道,若采用地基激光雷达采集数据,那么搬运仪器将会是一项十分繁重的工作,此时背包激光雷达的优势便愈加明显[24]。传统的外业数据调查方式在财力、物力和人力方面消耗巨大,且效率不尽如人意。而背包激光雷达特别适合于在样地尺度进行数据收集,只需一个人便可以轻松完成外业数据采集,节省出的时间与人力可以进行其他数据的采集,大大提高了外业数据采集效率。
5.2 结论
本研究利用背包激光雷达扫描了蒙古栎天然林3块样地,基于采集到的点云数据提取了蒙古栎的胸径和树高,最后根据提取出的胸径和树高构建了蒙古栎胸径-树高最优模型。得出了如下的具体结论。
1)利用背包激光雷达数据提取的蒙古栎的胸径和树高与实测数据具有很高的相关性,其中提取胸径与实测胸径的平均R2为0.948,RMSE为0.792 m;提取树高与实测树高的平均R2为0.942,RMSE为1.548 m。结果可靠,能够满足实际生产中每木检尺的要求。
2)利用所提取的胸径和树高建立的蒙古栎胸径-树高模型都具有很好的拟合效果,抛物线模型为基于BLS点云数据蒙古栎天然林胸径-树高最优模型,检验结果显示模型的MAE为1.524 m,RMAE为0.101。为背包激光雷达在林业建模方面应用提供了进一步的理论基础。
总的来说,背包激光雷达有一定能力在天然林中进行数据采集,这为后续天然林的研究提供了新的技术方法。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
农业工程学报(2022年14期)2022-10-19 02:24:48
地理空间信息(2021年10期)2021-11-14 10:01:12
汽车观察(2021年8期)2021-09-01 10:12:41
农民文摘(2019年11期)2019-11-15 01:03:48
中国交通信息化(2019年1期)2019-03-26 06:43:46
遥感信息(2019年1期)2019-03-22 01:38:16
电子制作(2018年16期)2018-09-26 03:27:00
森林工程(2018年5期)2018-05-14 13:54:30
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
