
基于柔性直流的海上风电送出系统设计与研究
2023-10-12 09:41王绍东
微型电脑应用 2023年9期
王绍东
(中广核新能源南通有限公司,江苏,南通 226400)
0 引言
一般来说,基于VSC-HVDC的海上风电送出系统包含一个整流站和一个逆变站,整流站将海上风电场产生的电能传输至直流线路上,逆变站接收直流线路上的电能向岸上交流电网传输。目前,有研究采用二极管整流器作为整流站的拓扑,以减小整流站的占地规模和造价[4-5],然而,这种拓扑无法为风机提供启动功率,不能向风电场提供无功功率,无法维持风电场交流电压稳定。而将两电平VSC作为逆变站的拓扑则会对交流电网造成谐波畸变,需要配置电容滤波器,增加了控制难度。
针对上述问题,本文提出了一种基于柔性直流的海上风电送出系统,其整流站采用两电平VSC拓扑结构,逆变站采用MMC拓扑结构。建立系统的数学模型并设计相应的控制系统,实现了有功和无功功率的灵活控制和风电场交流电压的稳定控制,MMC拓扑的应用使得无需在交流侧配置电容滤波器,便可提供较高的波形质量,显著降低了交流电网的谐波水平。
1 基于VSC-HVDC的海上风电送出系统拓扑
图1给出了基于VSC-HVDC的海上风电送出系统拓扑图。相较于传统LCC换流站,VSC具有能够提供无功功率补偿和没有换相失败风险等优势,且其建造占地面积更小,结构更加紧凑,非常适合于海上整流站的建造,因此本文海上整流站采用两电平VSC拓扑结构。以岸上逆变站为例,其交流侧接入交流电网,需要将直流侧有功输送至交流电网,因此对交流侧电压波形质量有很高要求,而MMC由于其模块化设计,便于扩展至不同电压和功率等级,交流侧电压波形质量高和低谐波畸变等优势[6],被应用至岸上逆变站的拓扑结构。
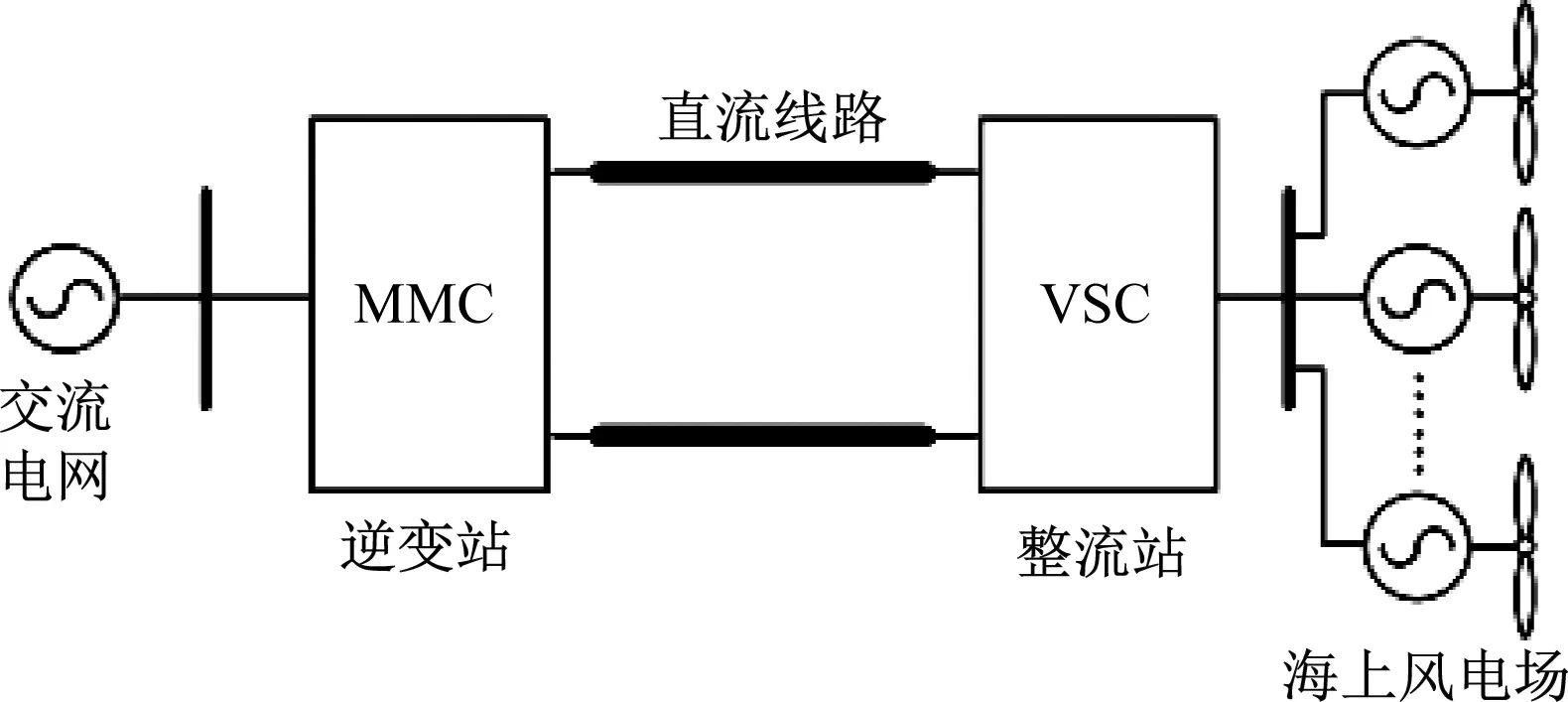
图1 基于VSC-HVDC的海上风电送出系统拓扑
2 整流站和逆变站数学模型
2.1 整流站数学模型
整流站采用两电平VSC拓扑结构,其内部电路拓扑结构如图2所示。图中,usa、usb、usc为风电场汇流母线三相相电压,ica、icb、icc为整流站三相输入电流,Rc为整流站交流等效电阻,Lc为整流站交流等效电感,uca、ucb、ucc为整流站在交流侧生成的三相参考电压,udc为直流线路极间电压,Cdc为直流滤波电容。

图2 整流站两电平VSC拓扑结构
整流站交流侧电压和电流的动态特性可通过列写交流侧电感的微分动态方程得到,如式(1):

(1)
为了便于对控制系统进行设计,需要三相abc坐标系下的交流侧微分动态方程变换至同步旋转dq坐标系下,此过程需要通过派克变换实现,变换后交流侧微分动态方程如式(2):

(2)
其中,icd、icq为整流站输入电流dq分量,usd、usq为风电场汇流母线电压dq分量,ucd、ucq为整流站在交流侧生成的三相参考电压dq分量,ωf为风电场角频率。
2.2 逆变站数学模型
逆变站采用MMC拓扑结构,其内部电路拓扑结构如图3所示。图中,usa、usb、usc为交流电网三相相电压,iva、ivb、ivc为逆变站三相输入电流,Rarm为MMC桥臂等效电阻,Larm为MMC桥臂等效电感,uva、uvb、uvc为逆变站在交流侧生成的三相参考相电压,udc为直流线路极间电压,Cdc为直流滤波电容。
腹泻时乳糖酶易受损,1岁以下立即改用无乳糖配方的腹泻奶粉。1岁以上辅食可以吃很多了,直接断奶和奶制品,几天不喝奶也没什么问题。

图3 逆变站MMC拓扑结构
与整流站类似,同样可以列写逆变站交流侧动态微分方程,如式(3):

(3)
将式(3)变换至同步旋转dq坐标系下后可得:
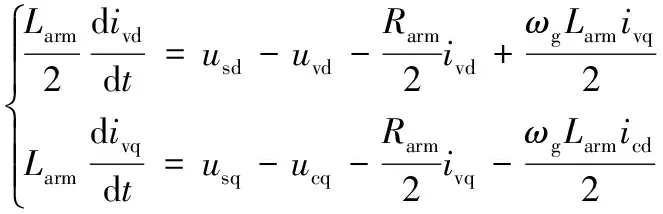
(4)
式(4)即同步旋转dq坐标系下MMC交流侧微分动态方程。其中,ivd、ivq为逆变站输入电流dq分量,usd、usq为交流电网电压dq分量,uvd、uvq为逆变站在交流侧生成的三相参考电压dq分量,ωg为交流电网角频率。
与两电平VSC不同的是,MMC桥臂内三相子模块电容电压并不完全相同,三相电压间的偏差会在桥臂内部造成环流,环流呈现负序二倍频特性。其同步旋转dq坐标系下动态微分方程如式(5):
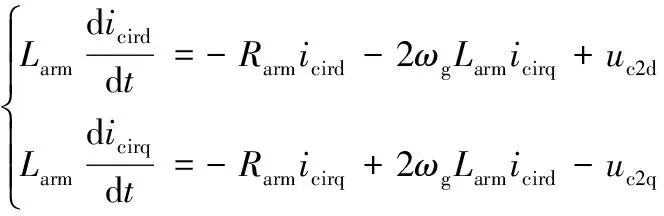
(5)
式(5)即同步旋转dq坐标系下MMC桥臂环流微分动态方程。icird、icirq为桥臂环流dq分量,uc2d、uc2q为桥臂二倍频调制信号dq分量。
3 整流站和逆变站控制系统设计
3.1 整流站控制系统设计
根据式(2)所描述的VSC交流侧电流动态特性,对其中电流微分项可采用PI控制进行补偿,其补偿值表达式如式(6):
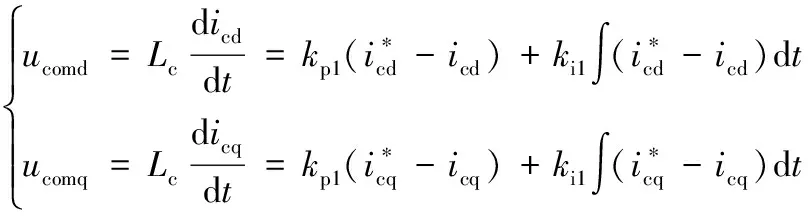
(6)


图4 整流站内环电流控制器
对于外环控制器,当VSC连接至双馈异步风电机时,可采用控制交流侧电压和频率的控制方式。此时,控制系统直接向风电场提供基准频率,无需锁相环对频率进行追踪,交流侧电压通过对电压dq分量的偏差进行PI控制得到交流电流dq分量参考值进行调节。其控制框图如图5所示。
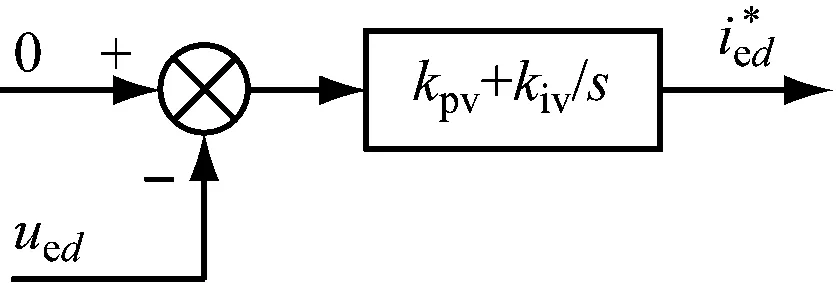
图5 整流站外环电压控制器

3.2 逆变站控制系统设计
MMC内环电流控制器的控制结构与VSC类似,推导过程和结构不再赘述。对于外环控制器,MMC交流侧连接有源电网,有稳定的交流电压和频率支撑,而VSC的控制策略需要依靠稳定的直流极间电压,因此,MMC的控制目标为保持直流极间电压的稳定,其可通过直流电压的偏差PI控制得到交流电流d轴分量的参考值来实现。另外,交流电流q轴分量可用来调节交流侧的无功补偿,其控制框图如图6所示。

图6 逆变站外环控制器

与VSC不同,MMC还需对桥臂内的二倍频环流进行抑制,以减少运行损耗和增强系统的稳定性。类似的,根据式(5)所描述的MMC桥臂环流动态特性,对环流微分项可采用PI控制进行补偿,其补偿值表达式如式(7):
(7)
其中,kp2,ki2分别为环流抑制PI控制器比例和积分增益系数。同样忽略Rarm的影响,根据式(5)和(7)可对桥臂环流抑制控制器进行设计,如图7所示。

图7 逆变站环流抑制控制器
4 仿真结果和分析
为了验证所提出的海上风电送出系统拓扑和控制方式的正确性和有效性,本节在MATLAB/Simulink平台中搭建了如图1所示的海上风电送出系统,其中海上风电场由可控功率源进行等效,岸上交流电网由可控交流源进行等效,VSC应用整流站控制系统,其对风电场的交流电压和频率进行控制,MMC应用逆变站控制系统,其对直流线路电压和交流侧输出无功进行控制。整个系统的电路和控制参数如表1所示。

表1 系统电路和控制参数
令系统稳态初始运行点为风电场等效功率源输出功率80 MW,MMC向交流侧输出无功功率0 MVar,t= 0.5 s时,风电场输出功率由80 MW阶跃至100 MW,系统暂态特性波形如图8所示。

(a) 有功无功暂态波形
由图8(a)可得,t= 0.5 s时风电场输出有功功率由80 MW快速提升至100 MW,无功功率在小幅度波动后恢复至原稳态运行点。图8(b)显示了风电场电压dq分量波形,由图可见,在风电场功率增加后,PCC处出现了功率盈余导致电压瞬时升高,之后迅速恢复至额定电压值,说明了VSC外环交流电压控制器的有效性。图8(c)直流线路电压波形,t= 0.5 s时受功率盈余影响,直流电压上升1%左右,其后受MMC直流电压控制的影响,逐渐恢复至原稳态运行点。图8(d)为逆变站MMC桥臂环流dq分量波形,由图可见在t= 0.5 s前环流dq分量保持为零不变,在受到功率扰动后,环流dq分量出现了短时暂态波动,0.6 s后恢复至原稳态运行值,验证了环流抑制控制器的正确性和有效性。
5 总结
本文提出了一种基于柔性直流的海上风电送出系统拓扑,其中整流站采用两电平VSC拓扑,逆变站采用MMC拓扑,分别建立了其数学模型并设计了相应的控制系统,给出了具体的控制框图,使整流站VSC实现了风电场交流电压和频率的稳定控制,逆变站MMC实现了直流线路极间电压和交流侧无功功率的稳定控制,同时桥臂内部环流得到了有效抑制,显著降低了MMC的运行损耗和交流电网的谐波水平。最后,以一个简化的海上风电送出系统为例,测试了其在风电场输出功率提升工况下系统的暂态响应特性,结果表明所提出的海上风电送出系统拓扑能够有效应对风电场功率波动,各外环内环控制器控制效果良好,暂态响应迅速且具有良好的稳定性。
猜你喜欢
电工技术学报(2023年16期)2023-08-30
粮食问题研究(2022年2期)2022-04-25
电子制作(2018年17期)2018-09-28
中国实用神经疾病杂志(2018年9期)2018-05-25
数学物理学报(2018年2期)2018-05-14
儿童故事画报·智力大王(2016年6期)2016-09-14
通信电源技术(2016年4期)2016-04-04
电气传动(2015年4期)2015-07-11
风能(2015年9期)2015-02-27
风能(2015年7期)2015-02-27
