
基于模糊控制算法的超声波自动泊车系统的研究与设计
2023-10-11 06:15:26仲济艳张佑春沈丽娜
兰州文理学院学报(自然科学版) 2023年5期
仲济艳,张佑春,沈丽娜
(安徽工商职业学院 应用工程学院,安徽 合肥 231131)
由于部分驾驶员停车经验不足,在面对复杂状态道路停车位和拥挤停车库时,存在严重的泊车安全隐患[1].随着信息化技术的发展,国内外车企都在加快自动泊车系统的研究与开发,并且在部分高档汽车进行了实践应用[2].由目前的泊车系统价位高,因此无法大面积普及.
为了解决上述问题,设计了基于模糊控制技术的超声波自动泊车系统.该系统利用超声波传感器完成车辆车位环境数据采集、双轴陀螺仪完成前轮转角数据采集和视频采集技术及倒车影像与泊车车位地图采集,并将采集参数通过模型控制方法实现自动泊车系统[3].经过Carsim 和Matlab-Simulink仿真与实际测试,自动泊车系统均成功完成了垂直泊车与平行泊车.在0~30°,前轮转角泊车过程中,均实现了快速准确自动泊车功能.
1 自动泊车系统建模设计
1.1 超声波温度补偿测距设计
超声波在传播过程中遇到障碍物会立刻折返,通过计时器记录下声波发射时间与接收时间节点,然后计算出发射设备与障碍物之间的距离[4].设声波的速度为v,往返时间为t,障碍物距离为s,得到距离计算公式为:s=v/2.
为了降低温度变动对超声波传播的干扰,提高系统的距离测量精度,设计了温度补偿校正方法[5].设温度值为τ,得到基于温度补偿的声波传播速度为:v=331.45×1+τ(273.15)0.5 m/s.
为了完成车辆的精确定位和车辆姿态角度的数据采集,系统采用8个超声波设备组成了信号四周采集测量装配,从而保障系统的稳定性和可靠性.
1.2 自动泊车系统阿克曼建模设计
为了方便完成自动泊车运动模型建立,将车辆简化成矩形刚体,以汽车的前轴与后轴的中心坐标为参考节点,得到汽车自动泊车运动的阿克曼转向几何模型如图1所示.
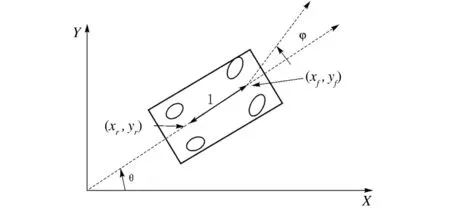
图1 阿克曼转向模型
图1中, (xf,yf)代表汽车的前轴坐标系数,(xr,yr)代表后轴坐标系数;φ代表汽车前转轮的转向角度数值;θ代表汽车自身的转角数值.设(xr,yr)后轴中心点的运动速度为vr,则汽车阿克曼转向几何运动方程式为:
xr=vfcosθcosφ=vrcosθ.
(1)
yr=vfsinθcosφ=vrsinθ.
(2)
(3)
由式(3)(4)(5)可知,在低速自动泊车环境下,(xr,yr)后轴节点运动为一个固定圆形轨迹,且定圆的半径值仅与汽车前轮转向角度φ数值相关.
1.3 模糊控制功能设计
为了实现自动泊车阿克曼转向几何运动模型,设计了自动泊车模糊控制方法.相对于传统运动控制技术,模糊控制集成了自然语言习惯,更加适用于自动泊车系统中.自动泊车模糊控制的方法主要包括:①环境采集.通过8个超声波装置完成车辆前后轴坐标(xf,yf)与(xr,yr)和车自身转角θ的数据记录,然后将坐标值与转角值进行数据预处理,最后完成数据的模糊化;②模糊推理.利用汽车驾驶员的传统泊车数据与模糊控制规则,完成模糊判断与模糊控制量计算;③转向舵机自动泊车.舵机利用模糊控制输出值自动控制汽车前轮转向角度,最终实现自动泊车功能.自动泊车模糊控制结构如图2所示.
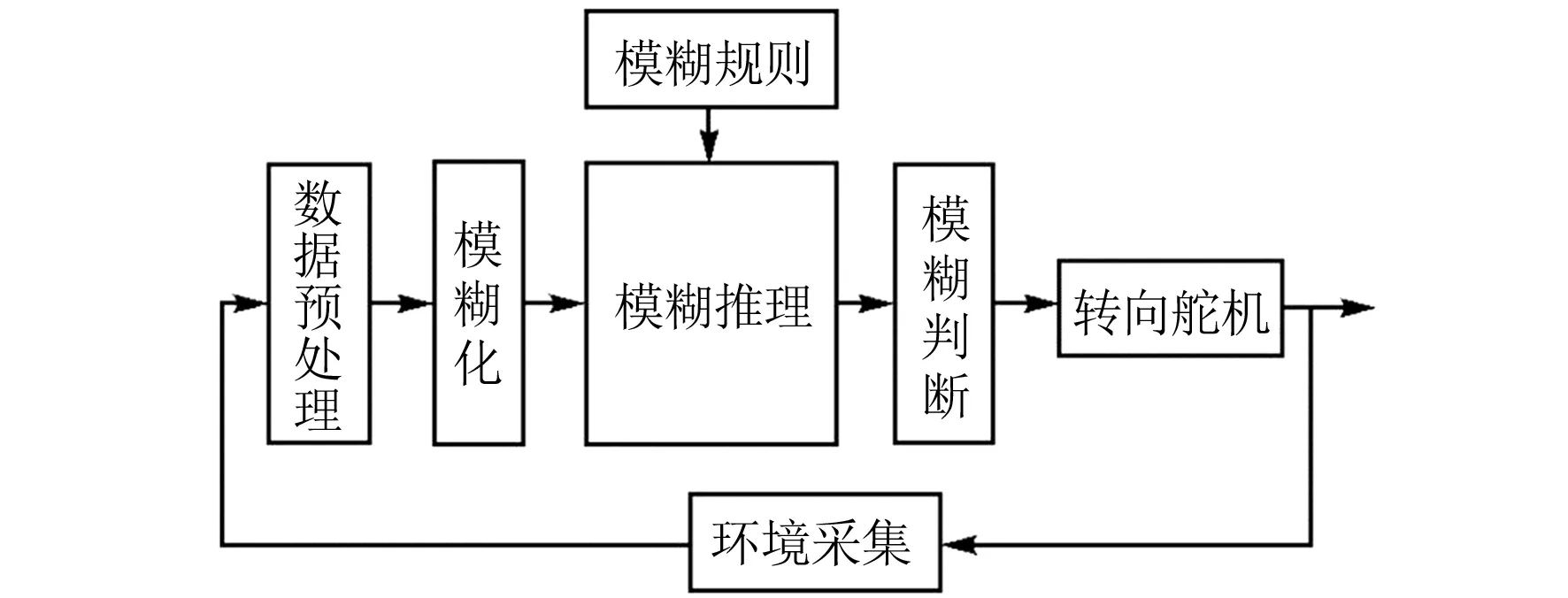
图2 模糊自动泊车系统控制结构
2 自动泊车硬件系统设计
自动泊车硬件系统[6]主要包括:①飞思卡尔K60核心控制器,负责泊车数据自动处理;②超声波接收装置,部署了8路超声波传感器,用于识别车位位置信息与泊车区域视图建立;③摄像头,完成倒车影像的数据采集,增强系统的智能化水平;④语音模块,在自动泊车过程中,通过实时语音提醒车主车辆运动状态;⑤电源电路,为系统提供供电支持.自动泊车硬件架构如图3所示.
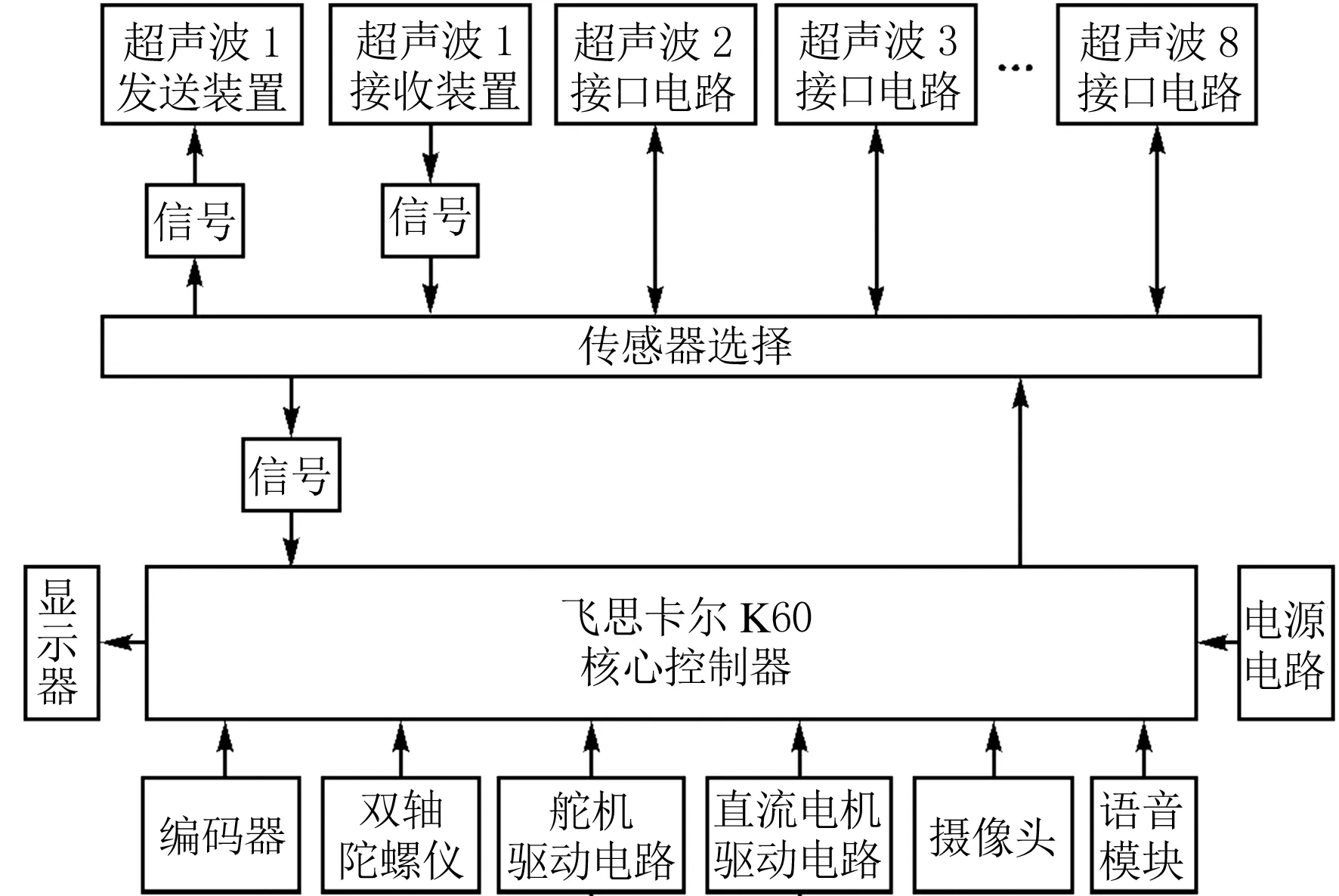
图3 自动泊车硬件系统电路
自动泊车系统启动后,K60直接控制舵机驱动电路,双轴陀螺仪将采集的汽车自身转角θ传输至K60,通过第1次PID控制算法,精准完成汽车前轮转角φ的数据采集与输出.利用直流电机驱动与编码器速度反馈至K60,通过第2次PID算法控制,完成自动泊车的平稳执行[7].
2.1 系统直流电机驱动电路设计
直流电机驱动电路采用了H桥驱动芯片BTS7960,直接控制直流电机的转向与速度.该电路功能包括了电流检测、驱动电机控制和P 型与N 型电路相位控制等[8],电路设计如图4所示.
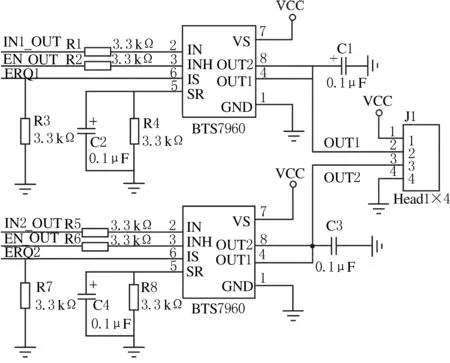
图4 自动泊车直流电机驱动电路
2.2 系统电源电路设计
等级电压采用了LM1117芯片实现12 V降维至3.3 V,为主控芯片K60供电.稳压电路采用了LM2940芯片,实现5 V电压稳定输出,实现摄像头电路、超声波电路和显示器电路持续稳压供电[9].舵机供电采用了LM2596-ADJ芯片,实现5 V可调电压的舵机驱动,电源电路连接设计如图5所示.
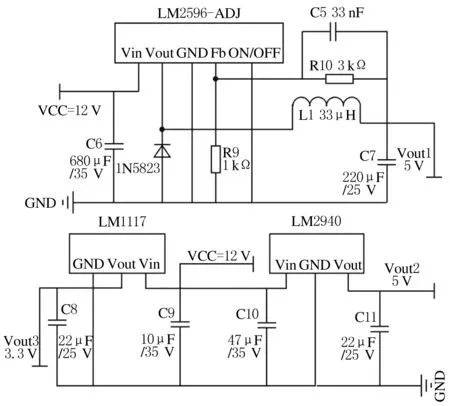
图5 自动泊车电源电路连接设计
3 自动泊车软件系统设计
当车辆进入预设位置后,人为启动自动泊车系统,同时完成泊车方式选择.泊车方式主要包括:①平时泊车模式.车辆直行,并利用摄像头自动搜索平行车位.当完成车位识别后,进行平行泊车并自动泊车;②垂直泊车.车辆直行,并利用摄像头自动搜索垂直车位.当完成车位识别后,进行平行泊车并自动泊车.利用超声波传感器和双轴陀螺仪采集汽车后轴坐标(xr,yr)、前轮转角φ和汽车车身航向角θ数据后,将参数输入模糊控制器中,从而实现车辆自动泊车运行状态的控制[10].自动泊车系统总体流程如图6所示.
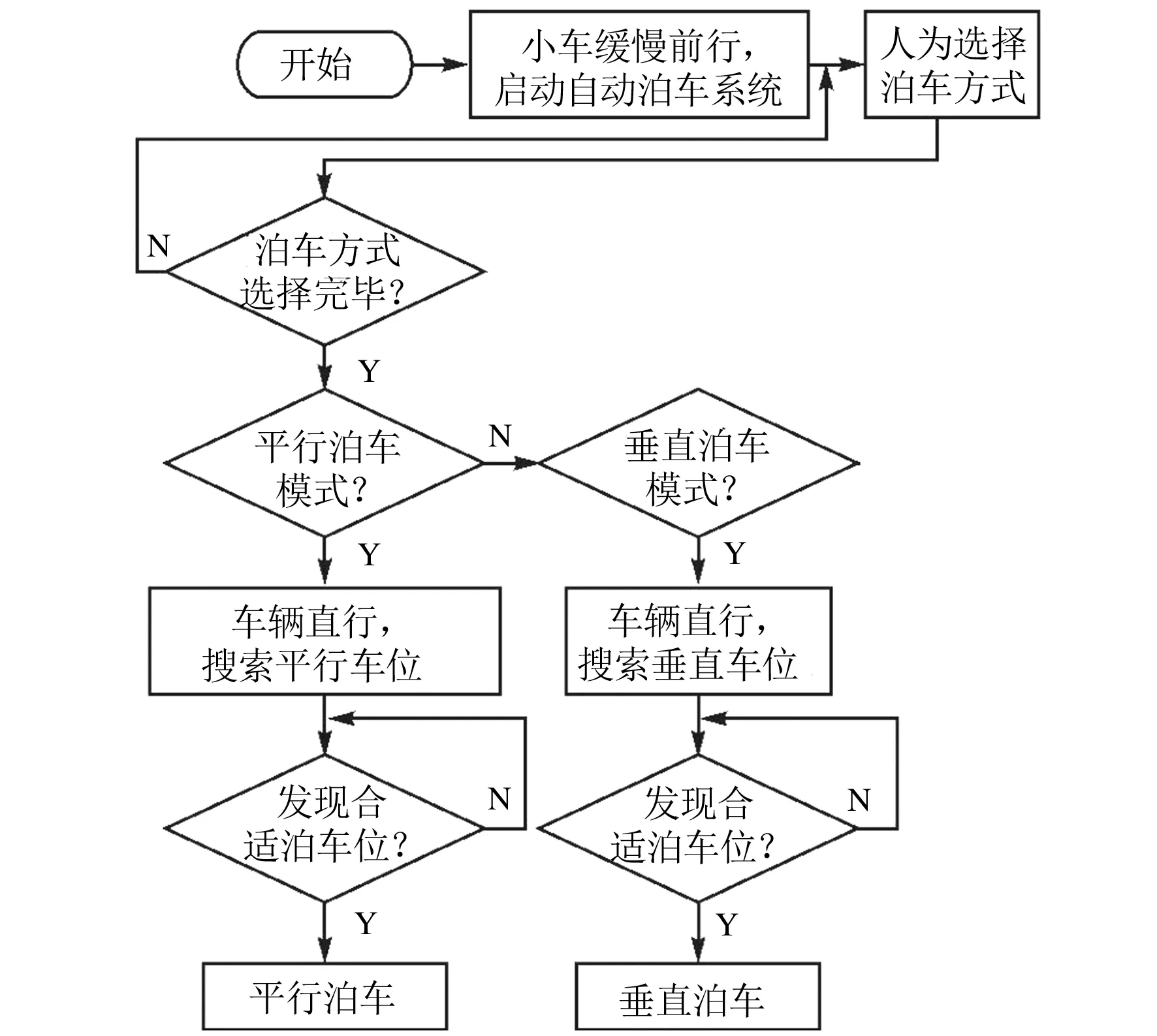
图6 自动泊车系统总体流程
自动泊车系统利用后置摄像头完成车位自动扫描和倒车影像启动,通过8个超声波传感器自动感知车位周边环境与自动采集泊车数据,应用模糊控制算法完成自动泊车过程中的车身姿态自动调整实现泊车功能.自动泊车子系统设计流程如图7所示.
4 系统仿真与测试
Carsim作为一款汽车仿真软件,可以模拟驾驶员操控、道路情况和车辆动力输出等.利用Carsim 和Matlab-Simulink整合建模,设置Carsim S-Function的输入与输出参数:①输入参数.IMP_STEER_L1为车辆前轮偏转角,IMP_STEER_R1为车身偏航角,IMP_STEER_R1为制动器的压力值;②输出参数.后轴中心点坐标为X0,后轴中心点Y坐标Y0和车辆航向角Yaw.
4.1 平行泊车Carsim仿真
选择平行泊车起点坐标为(9.392,0),车位设置为单步式平行泊车最小车位尺寸,平行泊车仿真实验运动过程如图8所示.
由仿真结果可知,平行泊车运动过程中车辆没有碰撞到车位边线,满足泊车避障约束要求.
4.2 垂直泊车Carsim仿真
选择垂直泊车起点为(8.062,3),垂直泊车仿真运动过程如图9所示.由仿真结果可知,垂直泊车运动过程中车辆没有碰撞到车位边线,满足泊车安全避障约束条件.
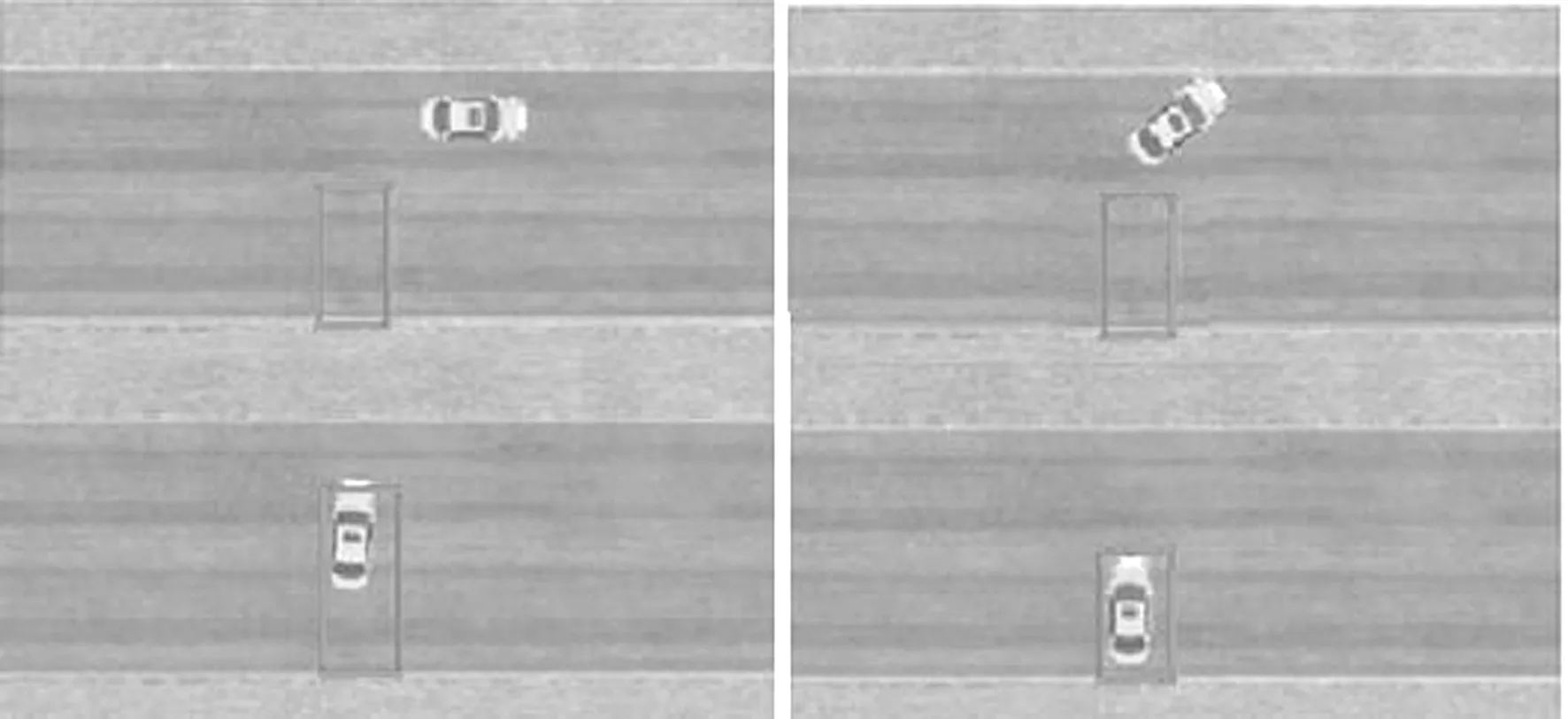
图9 垂直泊车仿真序列
4.3 系统实测结果分析
应用Carsim 和Matlab-Simulink软件完成自动泊车硬件系统搭建与测试.测试系统选用2个大小一样的模型车作为参考,按照实际车位比例预留空车位,完成自动泊车系统模型测试.自动泊车系统实际测试结果如表1所列.
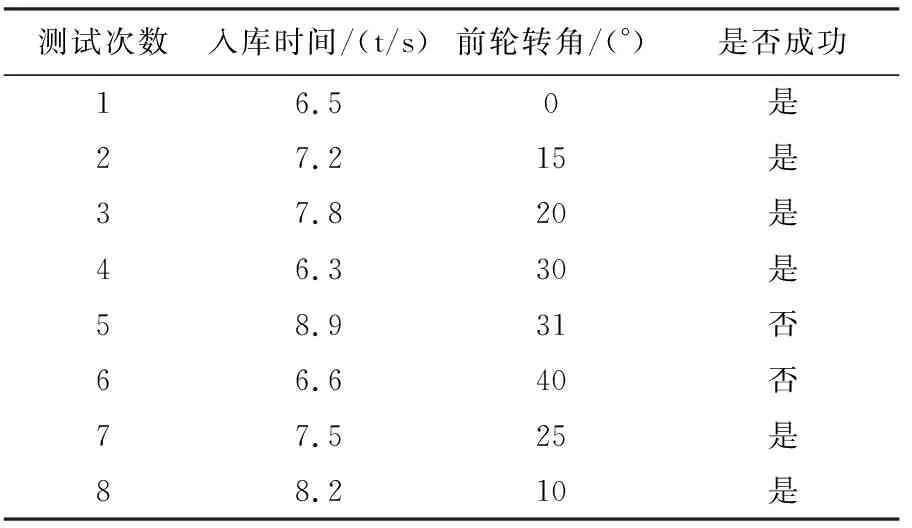
表1 自动泊车系统实测结果
由表1可知,当车辆的前轮转角控制在0~30°之间的6次泊车过程中,车辆模型均实现了快速准确的自动泊车功能,且精确度好、稳定性高.当前轮转角超过30°时,由于超声波测距装置的准确度受到干扰,车身定位与车位扫描的失误判断造成了自动泊车失败.
5 结语
基于模糊控制算法的超声波感知自动泊车系统完成了主控芯片K60、超声波传感器电路、双轴陀螺仪、直流舵机电路设计、语音、图像采集和电源电路等模块的设计.系统通过温度补偿,提高了超声波感知的精准度.系统采用了2次PID模糊控制,实现了平行泊车和垂直泊车功能.为了提升系统的人性化与智能化,添加了自动倒车影像车载显示与语音实时提醒功能.通过仿真与测试结果表明,该自动泊车系统的软硬件设计均满足设计初衷,具备一定的实用价值.
猜你喜欢
汽车实用技术(2023年10期)2023-06-14 07:13:06
汽车实用技术(2022年19期)2022-10-19 07:46:46
汽车实用技术(2022年7期)2022-04-20 11:57:58
装备制造技术(2021年4期)2021-08-05 07:39:40
汽车画刊(2020年5期)2020-10-20 05:37:35
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
军民两用技术与产品(2020年3期)2020-04-07 03:00:26
现代家长(2018年11期)2018-01-05 11:22:22
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
农机使用与维修(2014年11期)2014-11-18 01:32:07
