
基于车载LiDAR 技术的道路纵横断面自动提取方法
2023-10-11 08:48罗相涛
地理空间信息 2023年9期
罗相涛
(1.广州市市政工程设计研究总院有限公司,广东 广州 510060)
随着我国城市基础设施建设的快速发展,早期道路已无法满足城市发展需要,城市道路的改建、扩建和新建迫在眉睫,因此高效、合理、精确设计道路工程至关重要[1-2]。道路纵横断面能真实反映地面的起伏现状,是道路设计、工程预算和竣工验收的重要基础资料。传统纵横断面测量通常采用全站仪、GNSS RTK等方法依据设计中线逐点采集,操作繁琐,外业工作量大、效率低,无法满足日益增长的城市基础设施建设需求[3-4]。车载LiDAR技术作为激光扫描领域的重要分支,以汽车等移动载体为平台,是集激光扫描系统、高精度定位定姿系统、影像系统、同步控制器于一体的探测技术,具有精度高、测量快、受天气干扰低等优势,可快速获取道路及其两侧地物的三维空间信息,为道路工程设计提供了新方法[5]。众多学者[6-9]利用LiDAR 点云数据对城区道路进行初始提取,并高效绘制道路纵横断面图,为精细化城市管理提供了新的技术手段;但与高效、完整的需求还存在一定差距。鉴于此,综合精度和作业效率等相关因素,本文将车载LiDAR 的移动GNSS 数据与连续运行参考站系统(CORS)进行后差分处理,并与IMU 数据融合解算得到航迹数据,进而重新解算原始点云,得到初始点云;再对点云进行着色、降噪、滤波、分类等操作,得到高精度的地面点点云;最后叠加道路设计中线提取纵横断面数据,绘制纵横断面图。
1 设计实现
1.1 技术流程
车载LiDAR 的激光扫描仪通常倾斜放置在汽车上,以获取到目标点的距离等几何信息。车载GNSS记录行驶过程中的地理位置,IMU 同时记录激光扫描仪的俯仰角、侧滚角和航偏角等姿态数据,全景相机动态获取地物表面的影像信息[10]。根据上述原理,本文设计的道路纵横断面提取流程见图1,包括数据采集、航迹解算、点云处理、纵横断面提取4 个步骤。

图1 技术流程图
1.2 数据采集
数据采集是数据应用的先驱。车载LiDAR数据采集前,首先需对作业区进行实地踏勘,制定作业方案,规划行驶路线,综合交通情况、天气预报等因素,确定采集时间段。在GNSS 信号良好的空旷区域安装设备,依次开启控制器、IMU/GNSS、全景相机、激光扫描仪等系统,查看控制端与设备连接、设备运行状态是否正常并设置采集参数。开启IMU后,车载LiDAR 应原地静止5 min 再行驶一段L 形路线,使IMU 初始化。全景相机设置为按距离触发。以CORS 为基站,车载GNSS 接收的卫星数量应大于6 颗。各项准备工作完成后,沿规划路线采集数据。车速为60 km/h,避免急刹车、倒车、急转;在树下、桥下应平稳行驶,记录影响数据质量或完整性的问题。采集作业完成后,从控制器中完整拷贝采集数据,依次关闭各采集设备,最后关闭车载Li-DAR电源。
1.3 航迹解算
车载LiDAR的航迹解算又称POS解算,其目的是获取车载LiDAR在某一时间(UTC)精确的经纬度坐标值、航速和角度值[11]。本文采用Inertial Explorer(GNSS/IMU)后处理软件进行航迹解算,主要包括原始数据转换、耦合处理(GNSS 后差分解算、GNSS/IMU 组合解算、平滑处理)、输出结果等步骤。原始基站和车载GNSS 数据格式先转换为程序能识别的GPB格式;同时根据实际情况输入偏心分量、IMU测姿;可按时间间隔(0.005 s,即1 s输出200个点)或距离间隔(1 m,即1 m输出1个点)输出WGS84坐标系下的航迹数据。
1.4 点云处理与纵横断面提取
点云处理主要包括点云解算、点云降噪和点云滤波分类。纵横断面提取包括里程文件编制和纵横断面图绘制,工作量巨大。CAD作为设计软件,不仅可以加载点云,而且提供了二次开发工具,在实际工作中应用广泛[12]。本文采用CAD VBA开发了纵横断面提取工具,首先在地面点点云上叠加设计中线,由于地面点不会完全在断面线上,需设置阈值将搜索范围内的地面点归为断面点云,将距离中桩最近点云的高程视为中桩高程;然后计算断面上各点与中桩的距离和高差,并按一定格式生成道路里程文件;最后调用CAD绘图工具生成纵横断面图。道路纵横断面提取界面见图2。
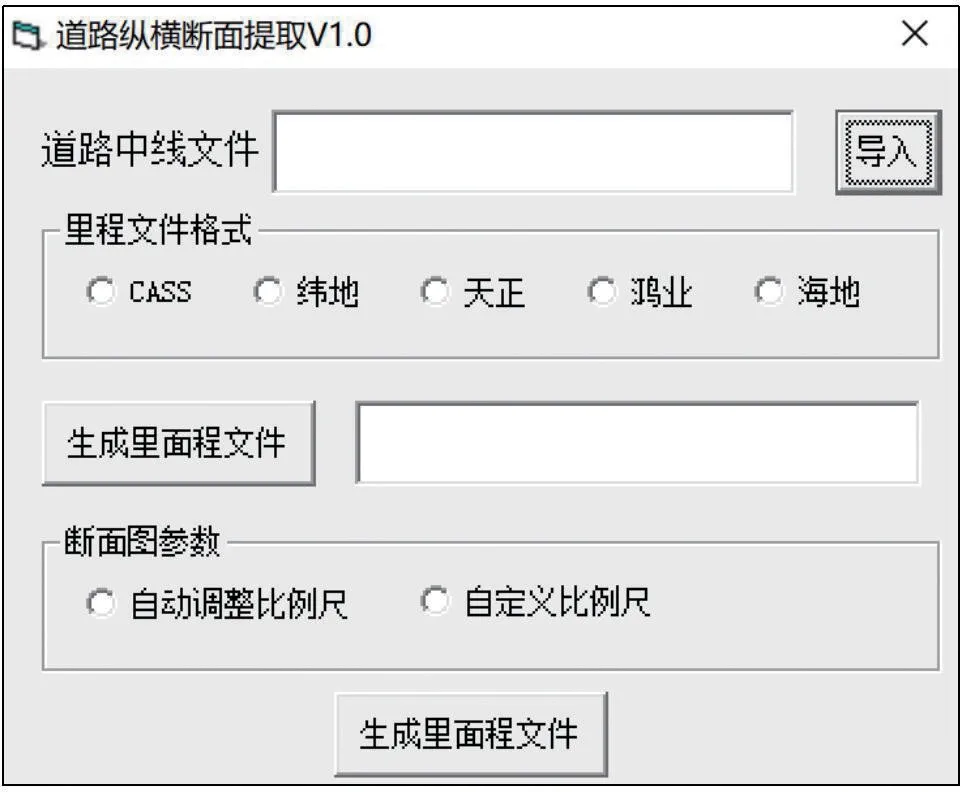
图2 道路纵横断面提取界面
2 工程实例应用
本文以海宁市鹃湖公园周边道路改造工程为实例,论证本文方法的可行性。项目范围东至环城东路、南至江南大道、西至碧云南路、北至海州东路,路线总长10 km,2021 年9 月29 日进行了首次数据采集,采集时气温为32℃、微风、空气质量优(PM2.5<35),采集耗时2 h。项目采用华测AS-900 多平台激光雷达系统(车载方式),整体发射频率为55 万点/s,最大测距为920 m,IMU 后处理位置误差水平为0.01 m,垂直为0.02 m,航向误差为0.017°。项目采用Inertial Explore 解算航迹,采用随机软件CoPre 进行点云融合、着色、坐标转换和初步去噪,采用TerraSolid 进行点云分类获取地面点,最终通过开发工具提取断面98 条。数据处理设备采用联想ThinkPad-P1(CPU 型 号IntelE-2176M、CPU 主 频2.7 GHz、RAM 32 GB),处理耗时3.5 h。提取过程部分效果见图3~6。
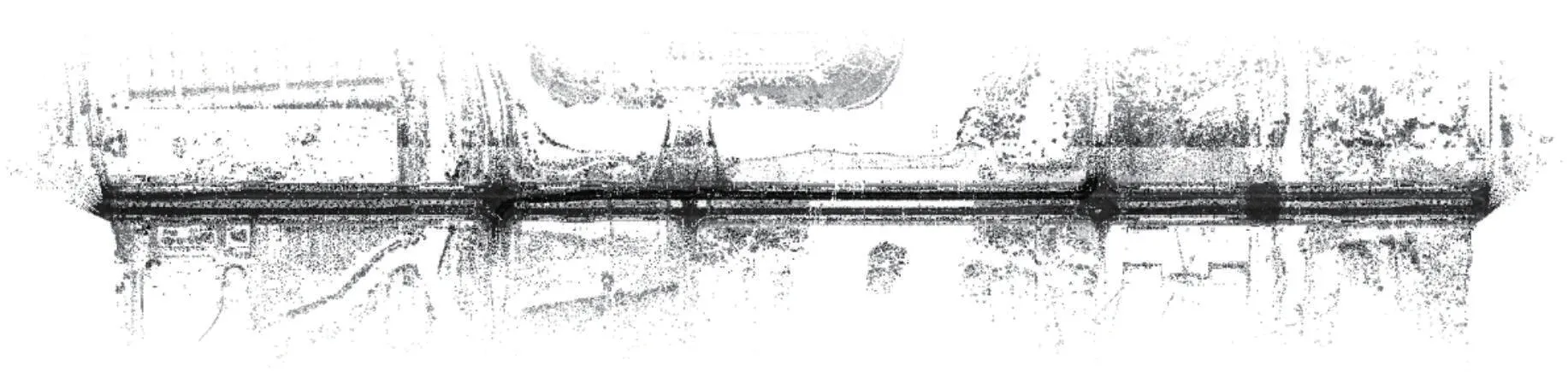
图3 原始点云

图4 点云降噪滤波

图5 点云分类(整体)

图6 叠加线路中心
纵横断面提取精度取决于地面点云精度,本文采用人工实地测量道路标志线角点的方法对点云进行精度评价。点云在反射强度模式下可清晰查看标志线点云坐标与人工测量坐标的差值。实地共测量173 个标志点,通过比较得到与对应点云在3 个方向上的误差(表1),可以看出,高程误差最大为4.2 cm,平面误差最大值为7.4 cm;高程中误差为3.5 cm,平面中误差分别为3.2 cm、3.3 cm,说明高程精度高于平面精度。在高程方向,由于道路地面较平坦,高程变化不大,可反映实际测量精度;而在平面方向,虽然道路路面点云密度达到100个/m2,但标志线角点坐标还是不能完整获取,会带来一定误差。

表1 车载LiDAR点云检测精度统计/cm
通过开发工具共提取98条断面,人工实地沿断面测点127个,以检核提取断面的相对精度(表2),可以看出,基于点云提取的断面相对精度,高程误差最大值为3.7 cm,平面误差最大值为6.3 cm;高程中误差为3.6 cm,平面中误差分别为3.3 cm、3.3 cm,说明华测AS-900 多平台激光雷达系统在道路测量中的高程精度优于4 cm,平面精度优于5 cm,可满足道路纵横断面提取的精度要求。
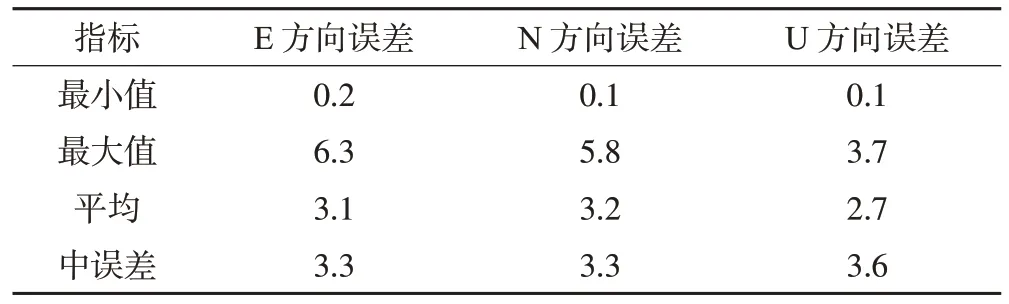
表2 基于点云提取的断面相对精度统计/cm
3 结语
车载LiDAR具有作业周期短、劳动强度低、测量精度高等优点。本文在车载LiDAR直接获取道路沿线三维地表信息的基础上,结合点云处理软件和纵横断面提取软件,设计了适用于道路纵横断面测量的技术流程,实现了道路纵横断面的自动快速提取。工程应用表明,车载LiDAR是获取道路纵横断面最具优势的测量方法之一,能满足道路维护测量、改扩建测量的需求。
猜你喜欢
工程建设与设计(2021年11期)2021-07-28
铁道通信信号(2020年8期)2020-02-06
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
中国公共安全(2017年11期)2017-02-06
中华老年口腔医学杂志(2016年6期)2017-01-15
北京航空航天大学学报(2016年6期)2016-11-16
中国感染控制杂志(2015年7期)2015-12-13
电源技术(2015年2期)2015-08-22
中国当代医药(2015年17期)2015-03-01
