
太阳能无人机辅助起飞装置动态参数模拟研究
2023-10-10 07:25:44李彦莹胡雪岑王振宇
兵器装备工程学报 2023年9期
吴 昊,李彦莹,孙 博,胡雪岑,王振宇
( 沈阳辽沈工业集团有限公司,沈阳 110045)
0 引言
太阳能无人机是利用太阳光辐射能作为动力的无人驾驶飞行器,它携带的太阳能电池可以将太阳能转化为提供搭载电动机的电能,从而产生飞行动力[1-2]。与常规固定翼无人机相比,其覆盖区域广、留空时间长[3],成为近些年来被各个国家正向研究的对象。起落架是无人机的重要组成部分,主要功能是支撑机体在地面停放、滑行、起飞、着陆、滑跑时受到的重力;承受、消耗和吸收机体在着陆与地面运动时的撞击和颠簸能量,以及在滑跑和滑行时为无人机带来一定的操纵能力[4-6]。
齐浩等[7]针对倾转旋翼无人机设计了一套可收放起落架,避免气动损耗,通过综合焦点、飞行器擦地角、防道理叫和刹车惯性力矩确定了安装位置;Ding等[8]设计了2种弓形梁式起落架,其中后者为前者的简化模型,通过显示动力学对受到冲击载荷下的起落架进行评估,对比了2种起落架的应力分布情况,发现简化后的起落架最大应力得到改善;Zhang等[9]利用Ansys CFX对水下滑翔机的着陆装置进行数值模拟,通过响应面法和粒子群算法减小起落架着陆阻力、高度等;赵知辛等[10]基于滑橇式起落架的弓形梁结构,在连接处加入类竹节结构,显著提高结构承载力与吸能性,通过比吸能分析、静力学有限元分析及动态载荷分析,验证了该起落架对复杂地形的适应性。但以上无人航行器的起落架未考虑轻量化设计,且未针对多种工况下开展动力学仿真分析。文献[11]根据某型太阳能无人机滑行阶段和起飞阶段的相应需求,设计了一种轻型遥控辅助起飞装置,在无人机滑行和下降过程中提供更强的缓冲性及抗坠毁性。该型太阳能无人机机体为碳纤维材料,具有大展弦比外形,该结构特征及气动外形使其易受气流、侧风等环境因素的影响。
本文中,根据文献[11]所述辅助起飞装置、某型太阳能无人机的机体和用来传递辅助动力的车载桁架作为动力学建模及仿真分析的对象,根据Catia方案模型对其进行拆解归类。提取质量、转动惯量等信息,在Adams软件中进行动力学仿真,使用Matlab/Simulink模块实现飞行力学载荷的计算。通过分析多种实际工况的计算结果,进一步改进辅助起飞装置结构,提高系统稳定性及可靠性。
1 辅助起飞装置动力学建模
1.1 坐标系及单位
地面坐标系:以无人机质心初始位置为原点,助推车体运动方向为X轴正方向,铅垂向下为Y轴负方向,根据右手定则确定Z轴正方向[12]。
机体坐标系:以无人机质心位置为原点,以无人机航向为X轴正方向,以无人机法向向上为Y轴正方向,根据右手定则确定Z轴正方向。
航迹坐标系:以无人机质心位置为原点,以无人机地速方向为X轴正方向,在包含X轴的铅垂面内,垂直于X轴向上为Y轴正方向,根据右手定则确定Z轴正方向。
气流坐标系:以无人机质心位置为原点,以无人机空速方向为X轴正方向,在包含X轴的铅垂面内,垂直于X轴向上为Y轴正方向,根据右手定则确定Z轴正方向。
模型单位:本项目建模与仿真统一使用法定计量单位,如表1所示。

表1 计量单位表
1.2 无人机系统起飞过程模型构建
从Catia导入的模型零部件,分为以下几部分。
1.2.1机体部分
机体部分,包括机身、机翼、尾翼、机轮、轮架、轮轴等。太阳能无人机机体Catia模型如图1所示,除起落装置外,无人机的质量设为72 kg,以机翼前缘与飞机纵向对称面交点为原点,前缘指向后缘方向为正,距离260 mm处为重心位置。三轴转动惯量分别为:Ixx=880 kg·m2,Iyy=940 kg·m2,Izz=60 kg·m2。

图1 辅助起飞装置初步方案Catia模型
1.2.2辅助起飞装置
辅助起飞装置:包括挡板、护栏、锁止销、电磁铁等。轻型遥控起落架结构部分初始方案单侧总重2.10 kg。由起落架架体及连接装置组成,如图2所示。初始方案起落架架体零部件明细如表2所示。
图2 辅助起飞装置单侧结构图
表2 初始方案起落架架体零部件明细
1.2.3车载桁架部分
以飞机起落架为基础,设计一套铝合金型材桁架。为满足飞机起飞速度要求,桁架与皮卡车后斗固定。同时飞机安装起落架后,放置在桁架的水平滑道上。在汽车加速时,为保护飞机在桁架上前后方向或左右方向晃动,该方案设计了锁止装置和护栏,以保护飞机起飞前的状态稳定性。当皮卡车行驶到飞机起飞速度要求时,锁止装置放行,飞机起飞。飞机飞行保持稳定后,起落架自动脱落。
桁架各部分组件功能介绍如下:
桁架主体:桁架选用80×80,壁厚5 mm铝合金型材架,通过连接件组装成一个V型架,底部与皮卡车固定,上部用于承载飞机主体。如图3所示。
图3 有限元网格模型
R型导轨:将R型导轨对称装配在铝型材两端,用于配合起落架轮胎。如图4所示。
图4 桁架R型导轨及起落架轮胎固定方式
锁止装置:包括电磁铁、锁止销等结构件,用于飞机的锁止与放行。飞机起飞前,电磁铁通电,锁止销被吸合,保护飞机前后串动,飞机达到速度后,锁止销脱落,飞机放行。
挡板:用于防止飞机横向偏移。如图5所示。

图5 桁架锁止装置及挡板作用方式
2 无人机安全起飞条件及气动参数
全程在机体质心处施加气动载荷,不同攻角下的气动载荷数据如表3所示。
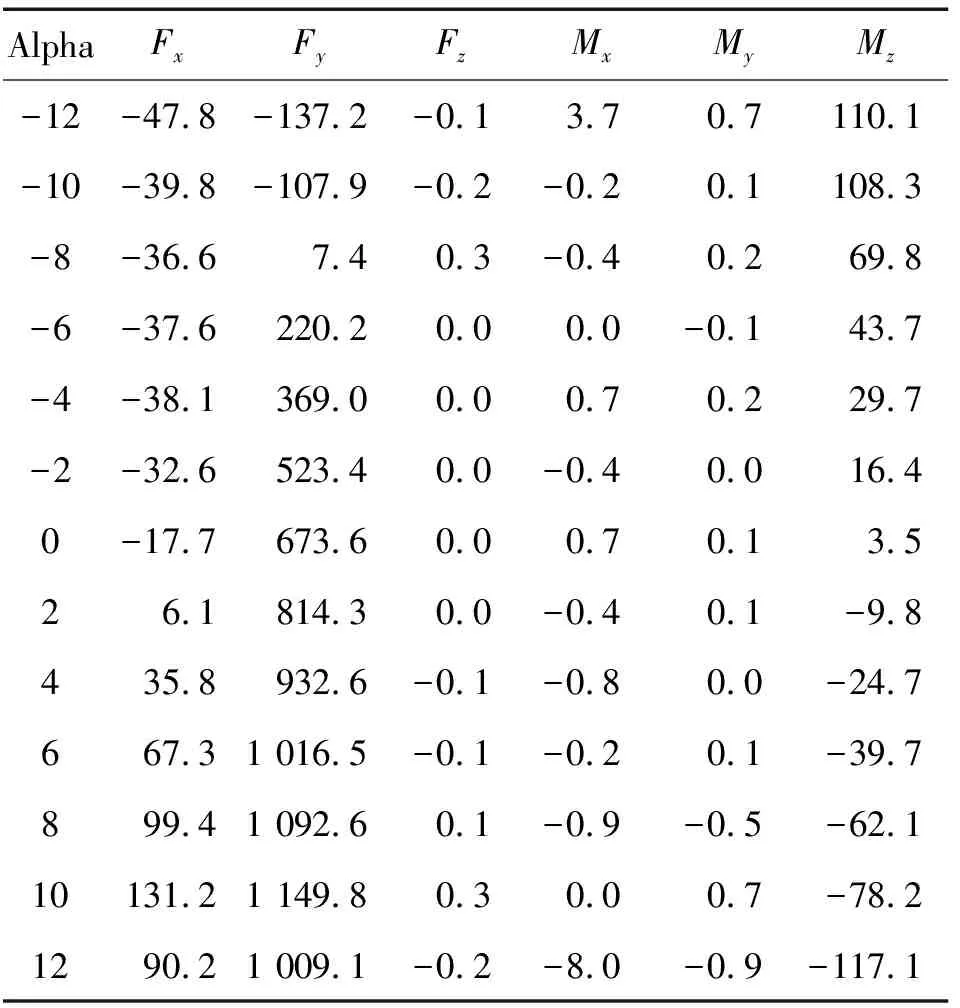
表3 不同攻角下的气动载荷数据
经过Ansys CFD气动外形仿真计算,太阳能无人机可以安全起飞的边界条件为:
起飞过程滚转角不超过-10°~10°;
车推辅助起飞方案助推过程中滚转角不超过-4°~4°;
起飞过程偏航角不超过:-10°~10°;
起飞过程俯仰角不超过:-10°~10°;
起飞过程侧滑角不超过:-12°~12°;
起飞过程迎角不超过:-3°~7°。
3 起飞过程仿真计算及分析
使用Adams软件建立的动力学仿真模型,如图6所示。
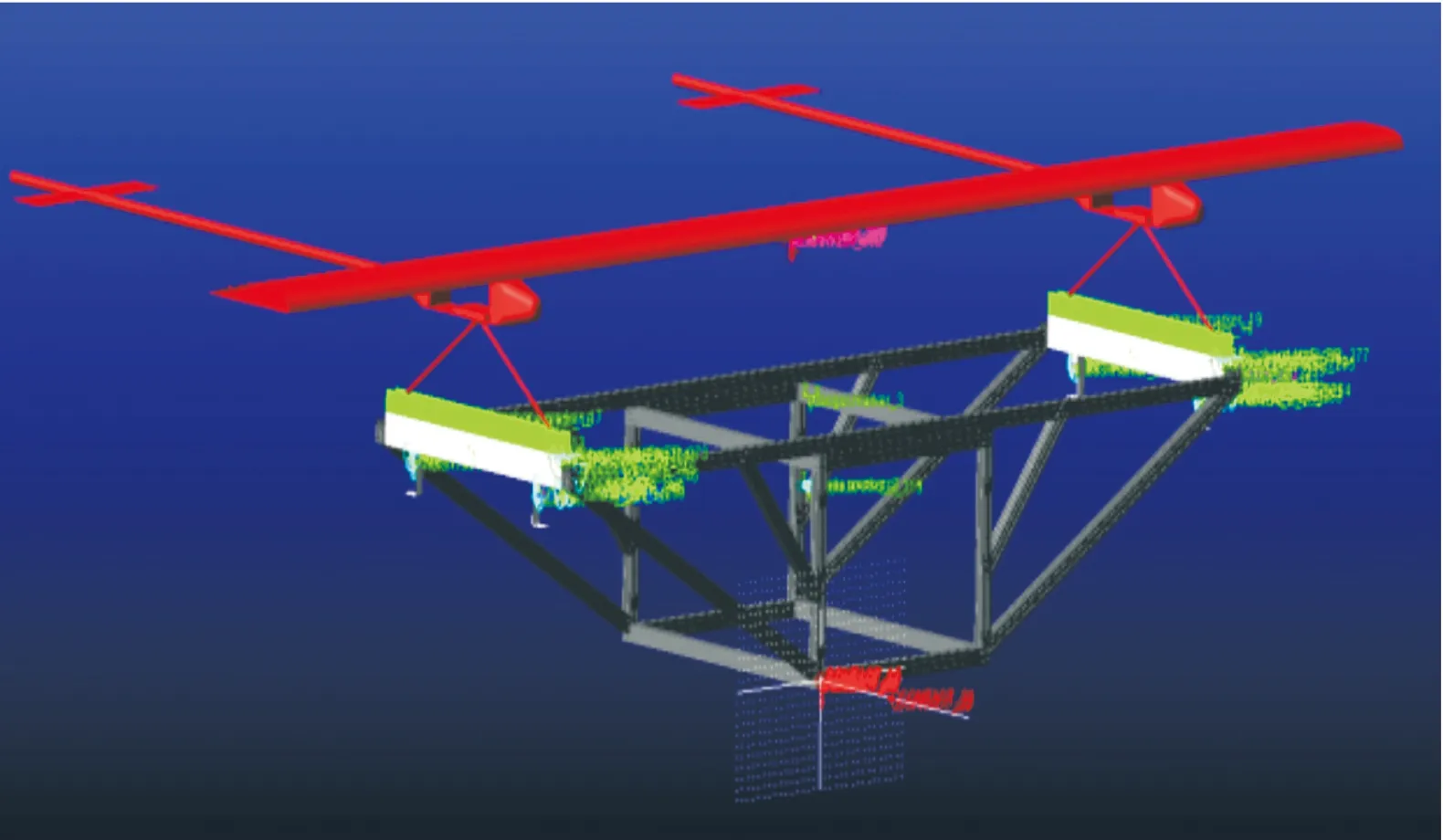
图6 Adams动力学仿真模型
主要涉及钢材、铝材、橡胶和地面之间的接触碰撞,采用使用较为广泛的冲击函数法进行碰撞力的计算,法向力通过IMPACT函数法计算,计算公式为[13]

(1)
摩擦力通过Coulomb方法进行计算,即
fi=μimig
fn=μnmng
(2)
式(2)中:fi、fn为前后轮轮胎、轮轴、轮架体杆、轮连接所受的切向摩擦力与法向摩擦力。
主要材料之间的碰撞参数和摩擦系数来源于Adams材料属性库与相关文献[14]。除理想条件下,进行考虑碰撞、约束释放、恒定侧风、侧向切边风工况下的情况分析。
3.1 Simulink/Adams仿真分析设置
本文中搭建的Simulink/Adams联合仿真模型如图7所示。
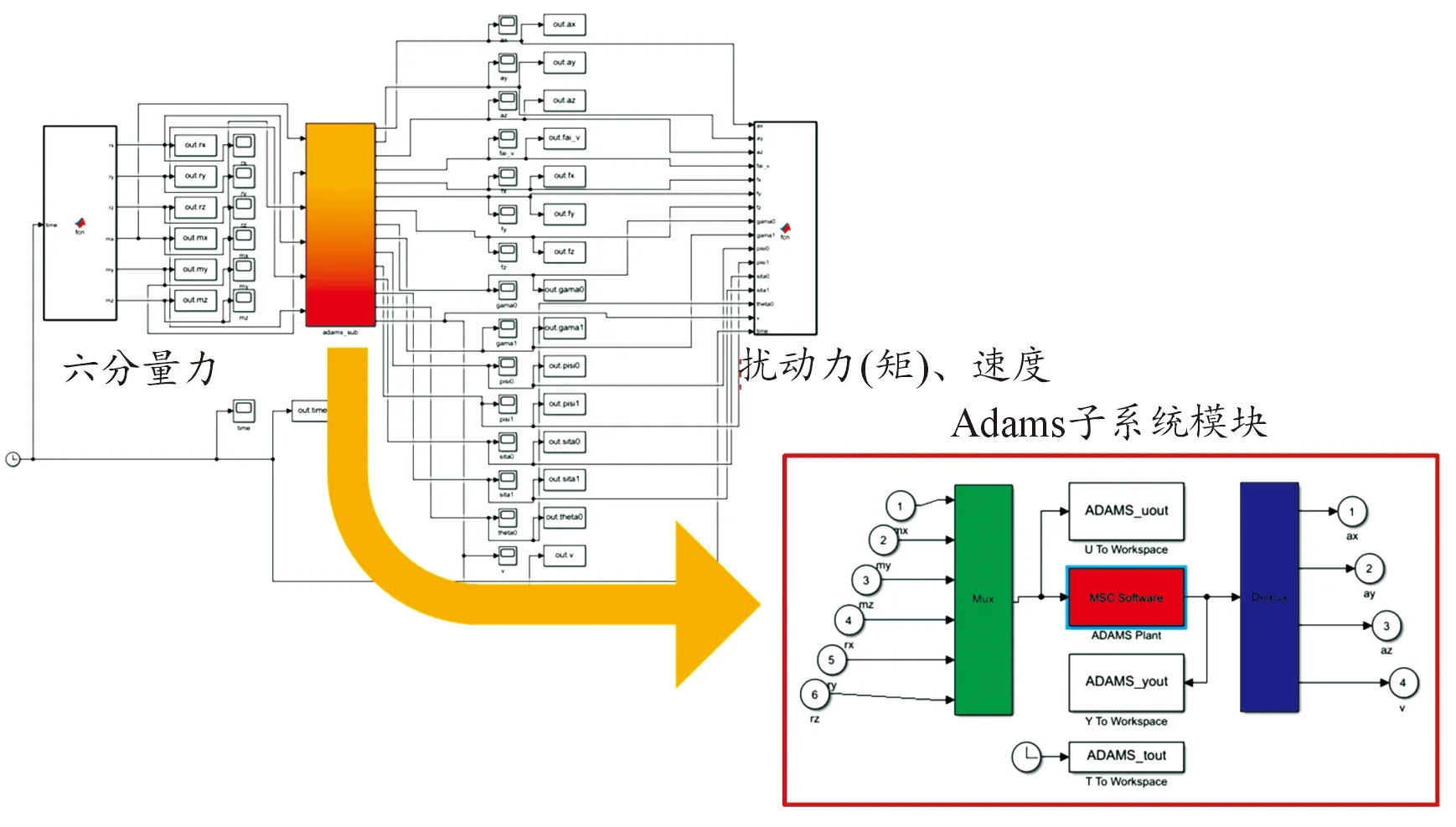
图7 基于Simulink/Adams的联合仿真模型
采用松耦合方式,引入双时间步法进行时间推进[15-16],可以在保证一定精度的同时减少计算时间,计算流程如图8所示。
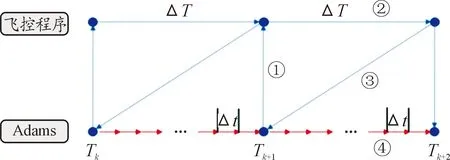
图8 双时间步松耦合计算流程
图8中,Δt=0.001 s,ΔT=0.001 s。ΔT为每次调用Adams或飞控程序的仿真总时间,Δt为仿真时间步长。以Tk+1到Tk+2为例。
在Adams中提取时刻Tk+1飞机的速度、姿态角、角速度,提取Tk到Tk+1时刻飞机的扰动力(矩),传递给飞控程序;
在飞控程序中计算Tk+1到Tk+2时刻的气动力、控制力矩、阻尼力矩;
将上述参数通过数据传递接口传给Adams;
在Adams中以插值的形式施加上述力(矩),进行第Tk+1到Tk+2的仿真,得到ΔT内各个Δt子步的结果将用于下一时间段的仿真。
仿真总时长设为20 s,具体流程如下:
1) 第0~1 s,无人机随车架一起运动,车速以11 m/s速度起飞,此阶段目的是为了达到稳定状态,不与飞控程序交互。
2) 第1~2 s,车速保持11 m/s不变,第2 s末,释放电磁铁处的约束。
3) 第2~3 s,车架仍以11 m/s的速度匀速运动,继续执行无人机Adams动力学仿真模型与飞控程序的交互求解,直至无人机脱离车架,随后调用飞控程序开环求解。
4) 第3~20 s,车架匀减速至0,继续调用飞控程序开环计算。
基于仿真分析结果,目前的无人机辅助起飞装置存在以下问题,可能会导致起飞失败:
1) R型导轨与机轮为线接触,运行过程不稳定。
2) 当遭遇侧风时,锁止销下落过程中容易发生卡滞。
故将轮式起落架改为碳纤维板制成的滑橇,由线接触变为面接触,减轻起落架重量的同时增加稳定性;在原先的桁架上放置固定滑橇的铝合金型材,防止车加速时飞机在桁架上前后方向或左右方向晃动。主要部件为:机体、碳纤维滑橇、铝合金车架、型材、电磁铁。建立的碰撞关系主要有以下3类:滑橇-铝合金车架、滑橇-铝合金型材、滑橇-电磁铁。改进方案关键部件如图9所示。
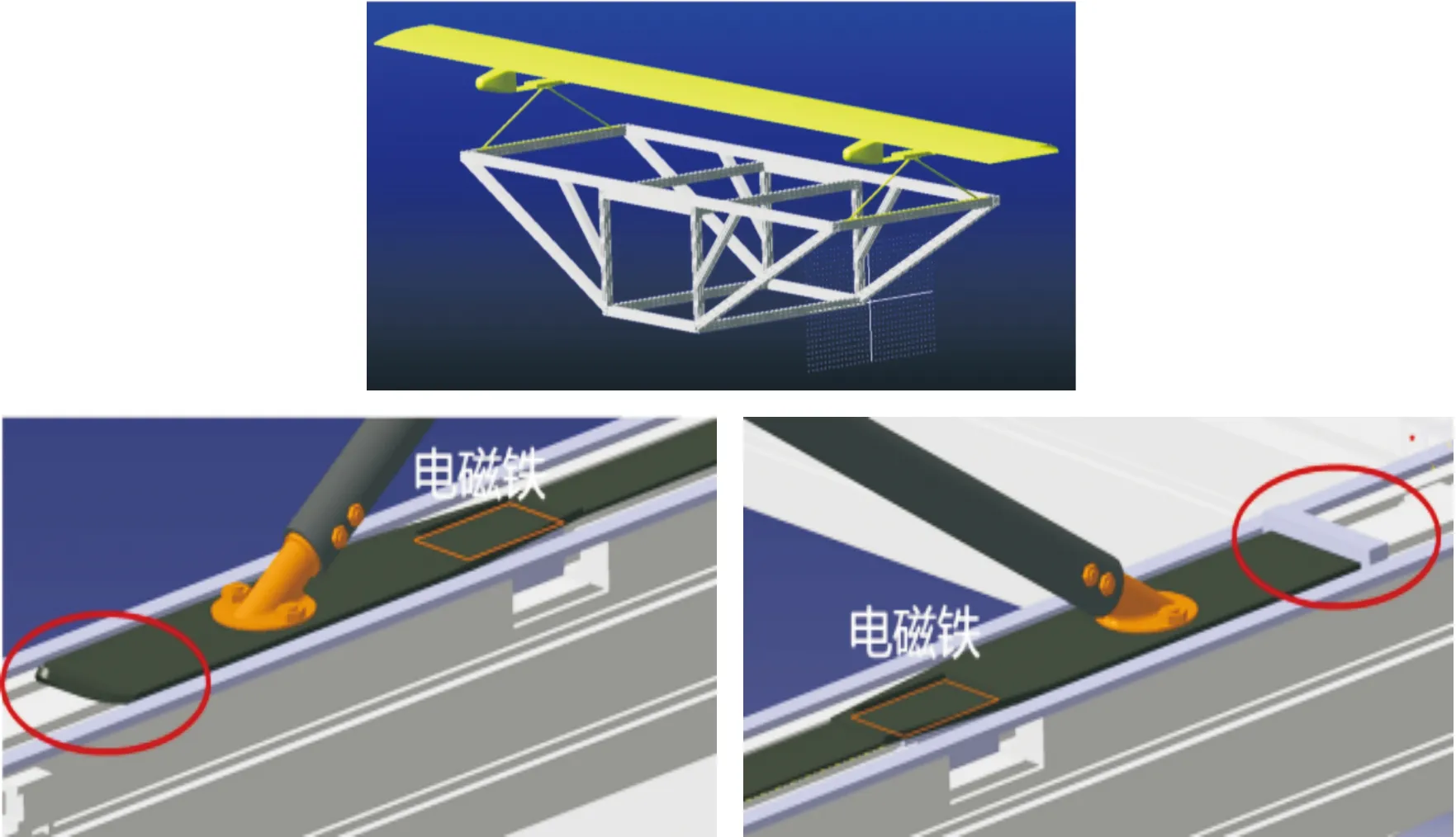
图9 改进方案关键部件
起落架前侧做成上翘的形式,利于无人机滑出,起落架后侧有一凸台,防止无人机向后掉落。防脱落功能由电磁铁解锁装置实现(如图9橙色方框),经实际测试,左右两侧电磁铁释放最大间隔为20 ms。
3.2 考虑碰撞因素仿真结果
在Adams中进行考虑车架-起落装置碰撞影响下车载方案仿真分析,不考虑侧风的影响。分析部件之间的碰撞及电磁锁释放同步性对无人机起飞的影响,提取无人机随车架运动时的最大干扰力、干扰力矩,作为判断无人机是否能够正常起飞的辅助参考依据。当无人机在车架上随车架一同运动时,地面对车架、车架对起落装置都存在干扰力和干扰力矩,提取各时间步下无人机相关姿态数据(地速、姿态角、姿态角速度、速度角)以及干扰力、干扰力矩交互给飞控程序,实现考虑碰撞干扰下的无人机动力学仿真。计算如下几个工况(起飞速度为11 m/s):
1) 第2 s时,左右两侧电磁铁约束同步释放。
2) 第1.95 s,左侧电磁铁先释放,第2 s,右侧电磁铁释放。
3) 第1.9 s,左侧电磁铁先释放,第2 s,右侧电磁铁释放。
工况②、工况③下无人机受到的干扰力及干扰力矩分别如图10、图11所示。
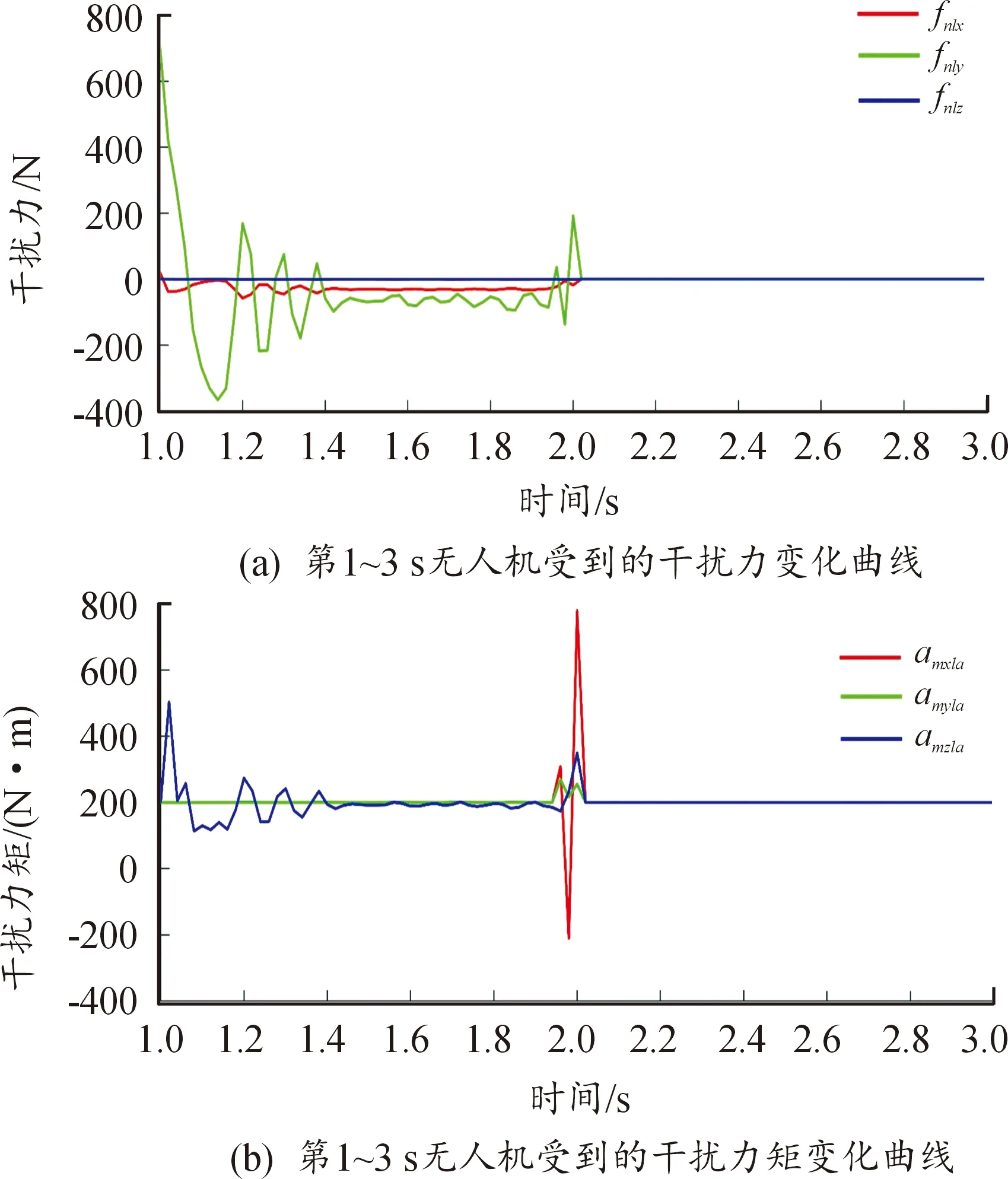
图10 工况②下无人机受到的干扰力及干扰力矩
仿真时长为16 s,仿真时间步长为0.005 s,从Adams中提取工况②、工况③第1~3 s的干扰力、干扰力矩,可以看出第1.2 s后,干扰力和干扰力矩都趋于稳定,在释放电磁铁处的约束时有较小的突变,随后都减小至0,这也说明了后续直接调用飞控程序进行开环计算的合理性。由于无人机在随车架运动的阶段各姿态受到车架及电磁铁的约束,无人机除纵向加速度之外的加速度值保持在0左右,纵向由于受到碰撞的影响,因此会承受较大的干扰力。第2 s时,沿y轴干扰力的最大值为218.195 5 N,此刻,绕x轴方向的干扰力矩值为599.999 5 N·m。当约束释放间隔为100 ms时,最大干扰力、干扰力矩的数值与间隔50 ms释放时的区别不大,但不稳定的时长更长。
机体坐标系下,无人机在整个仿真阶段的气动力(矩)、控制力(矩)、阻尼力(矩)之和的时间历程曲线如图12所示,由图12可以看出,释放电磁铁处约束(第2 s)后无人机所受的气动载荷较为稳定,没有发生较大的突变。此外,交互仿真段和开环计算段的参数衔接过渡较好,这也说明了交互仿真的合理性。
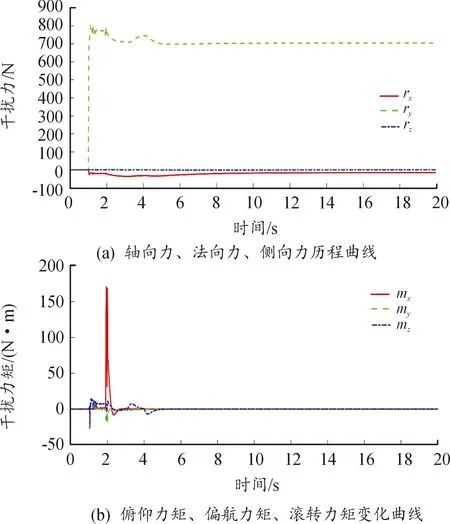
图12 无人机受到的气动载荷变化曲线
无人机在整个仿真阶段的迎角、侧滑角如图13所示,由图13可以看出,迎角最小为-1.277 4°,由于未考虑侧风,侧滑角也很小,最大为0.105 7°,均未超出给定的危险边界。
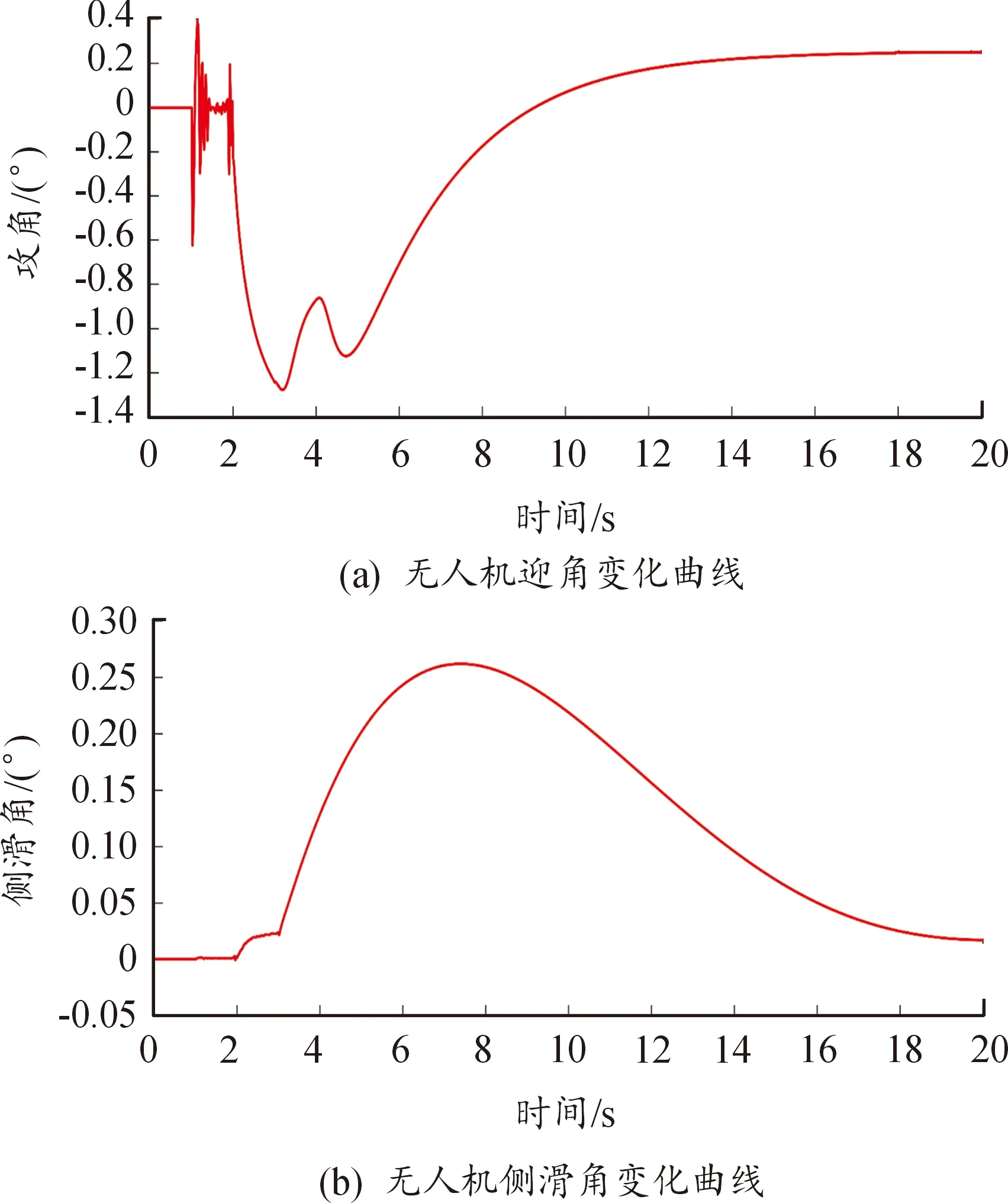
图13 无人机迎角及侧滑角变化曲线
3.3 考虑恒定侧风影响下的仿真结果
在Adams中进行考虑碰撞与恒定侧风影响下车8i无人机在车架上随车架一同运动时即开始施加侧风,地面对车架、车架对起落装置都存在干扰力和干扰力矩,提取各时间步下无人机相关姿态数据(地速、姿态角、姿态角速度、速度角)以及干扰力、干扰力矩交互给飞控程序,采用3.1节所述的联合仿真流程,实现考虑碰撞干扰下的无人机动力学仿真。计算的具体工况如下:起飞速度为11 m/s,施加2 m/s侧风(Winddirection=90°),第1.95 s,左侧电磁铁约束先释放,第2 s,右侧电磁铁约束释放。
从Adams中提取第1~3 s的干扰力、干扰力矩变化曲线如图14所示。
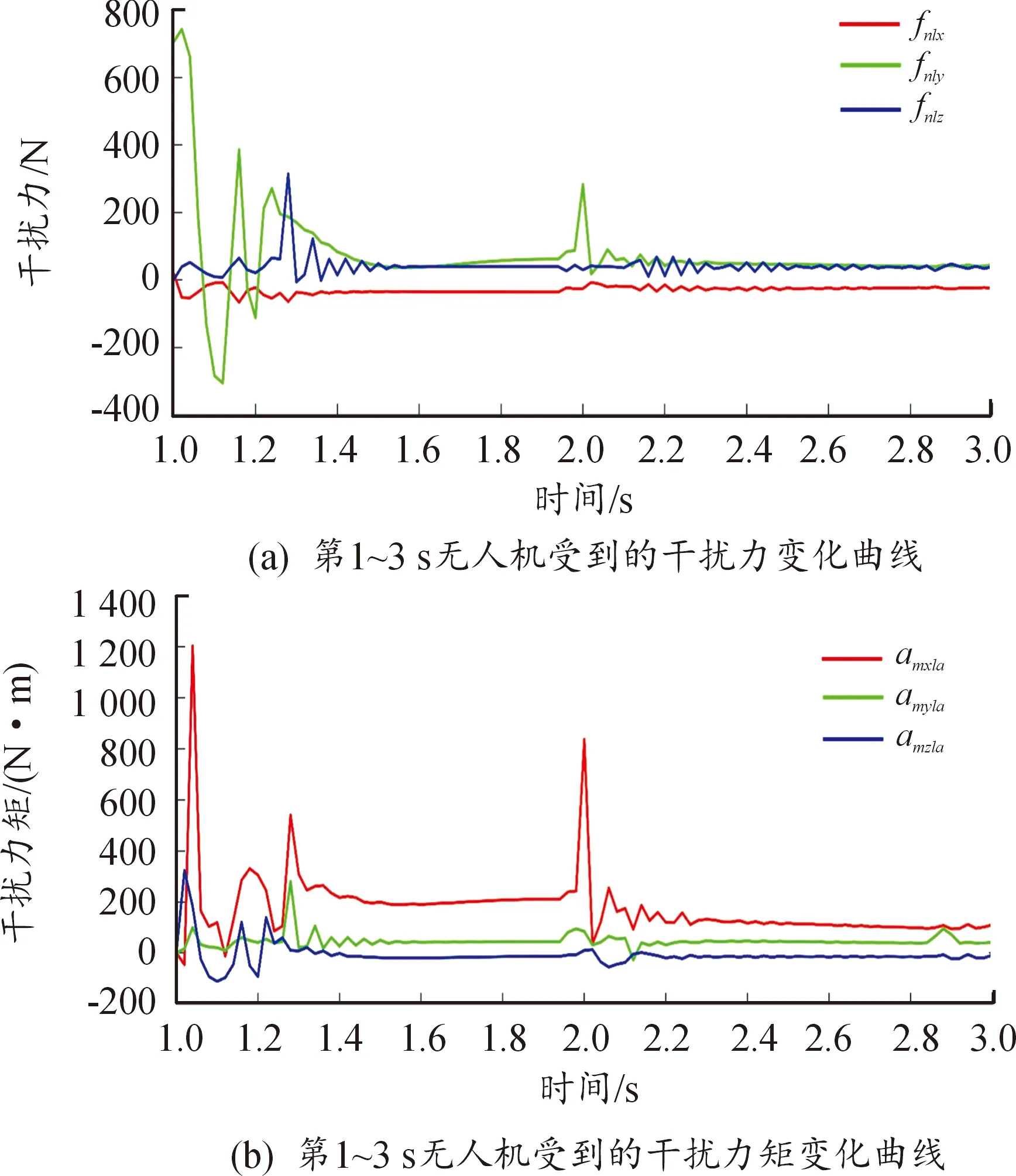
图14 第1~3 s无人机干扰力和干扰力矩变化曲线
由图14可以看出,第1.2 s后,干扰力和干扰力矩都趋于稳定,在释放电磁铁处的约束时有较小的突变,随后都减小至0,这也说明了后续直接调用飞控程序进行开环计算的合理性。由于无人机在随车架运动的阶段各姿态受到车架及电磁铁的约束,无人机除纵向加速度之外的加速度值保持在0左右,纵向由于受到碰撞的影响,因此会承受较大的干扰力。侧向由于一直承受较强侧风作用,也会承受较大的干扰力,第2 s时,沿y轴干扰力值为283 N,此刻,绕x轴方向的干扰力矩值为837.868 7 N·m。释放电磁铁约束后,干扰力不为0。无人机受到的气动载荷变化曲线图图15所示。
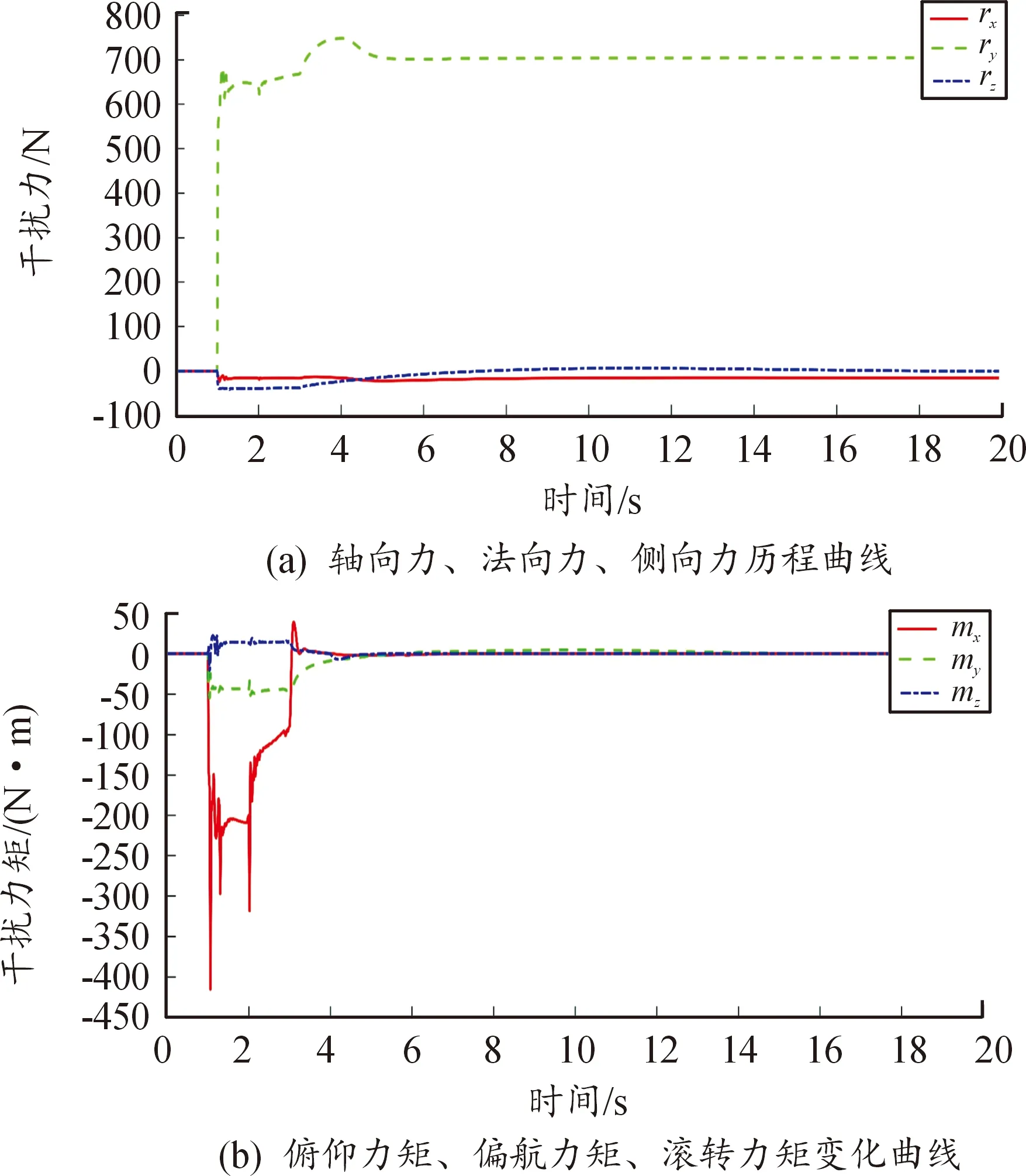
图15 无人机受到的气动载荷变化曲线
无人机在整个仿真阶段的迎角、侧滑角如图16所示,由图16可以看出,迎角最小为-0.946 2°,最大为0.538 8°。由于在车上时受车架约束,侧风作用下侧滑角基本保持不变,约为10.43°,均未超出给定的危险边界,从车架上起飞后侧滑角在控制系统的作用下恢复至0°附近。与同步释放的趋势、极值都较为接近,因此可以认为50 ms的释放间隔对2 m/s侧风释放下的无人机来说是安全的。
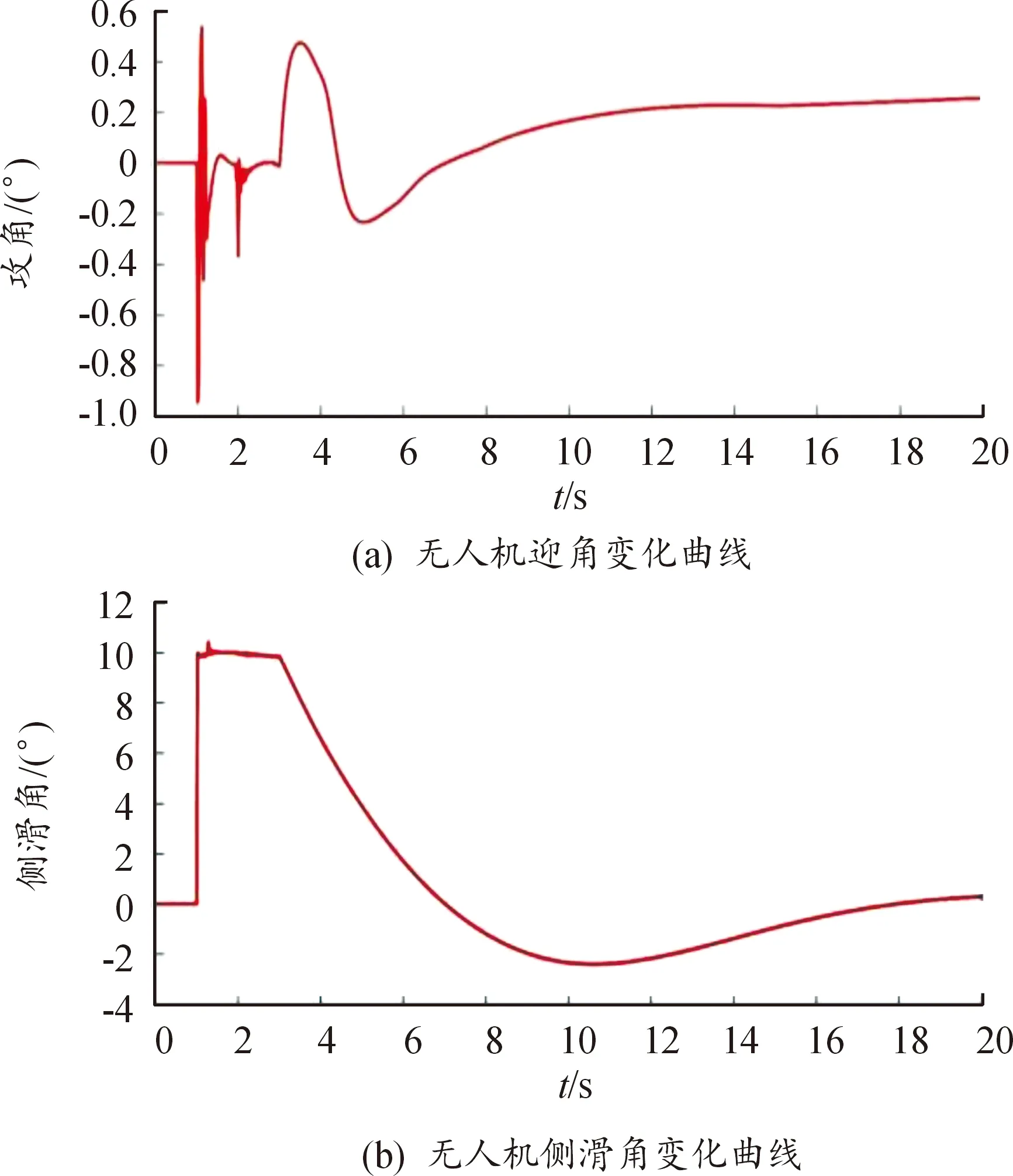
图16 无人机迎角及侧滑角变化曲线
3.4 侧向切变风下的仿真结果
在第3.3节恒定侧风计算基础上,假定侧风在第10 s时风向突变。起飞速度为11 m/s,在Adams中进行切变侧风影响下的无人机辅助起飞装置动力学仿真分析。计算的具体工况如图17所示。图17中,工况①第10 s时风向由90°变成270°,风速不变;工况②第10 s时风向由90°变成180°,风速不变;工况③第10 s时风向由90°变成0°,风速不变。
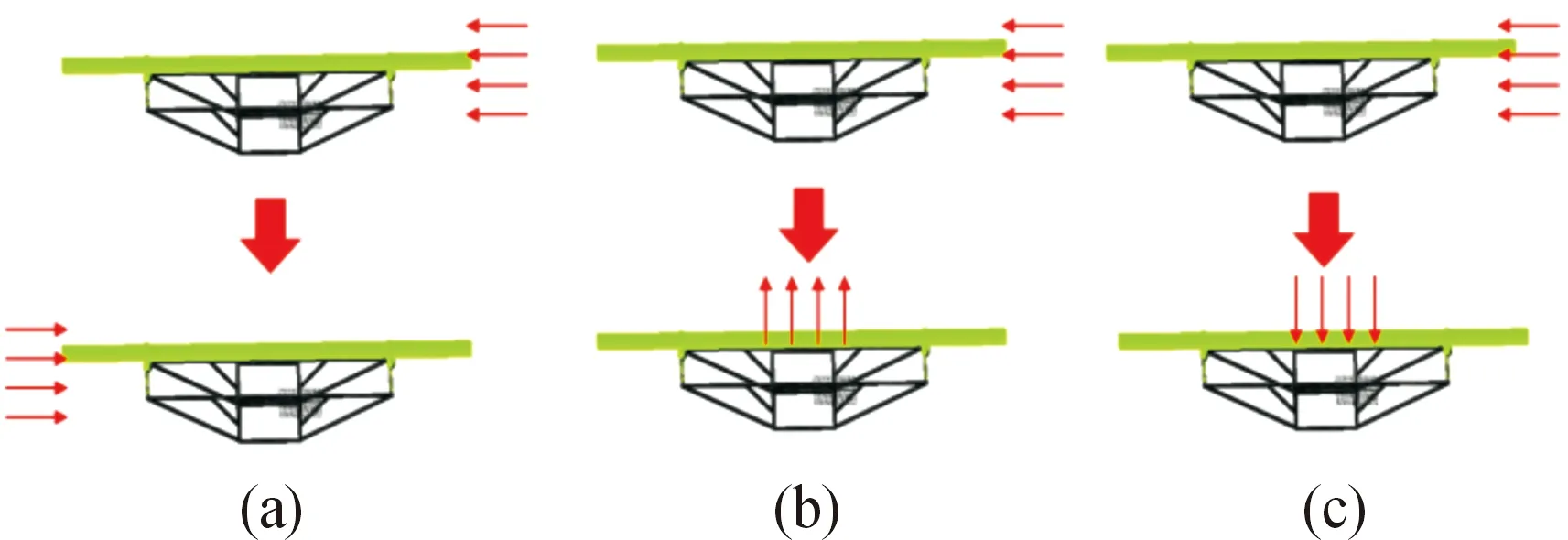
图17 侧风切变示意图
3.4.10~10 s,侧风恒为2 m/s,方向90°,第10 s,方向改为270°
无人机在工况①情况下整个仿真阶段的迎角、侧滑角、对地速度如图18所示。
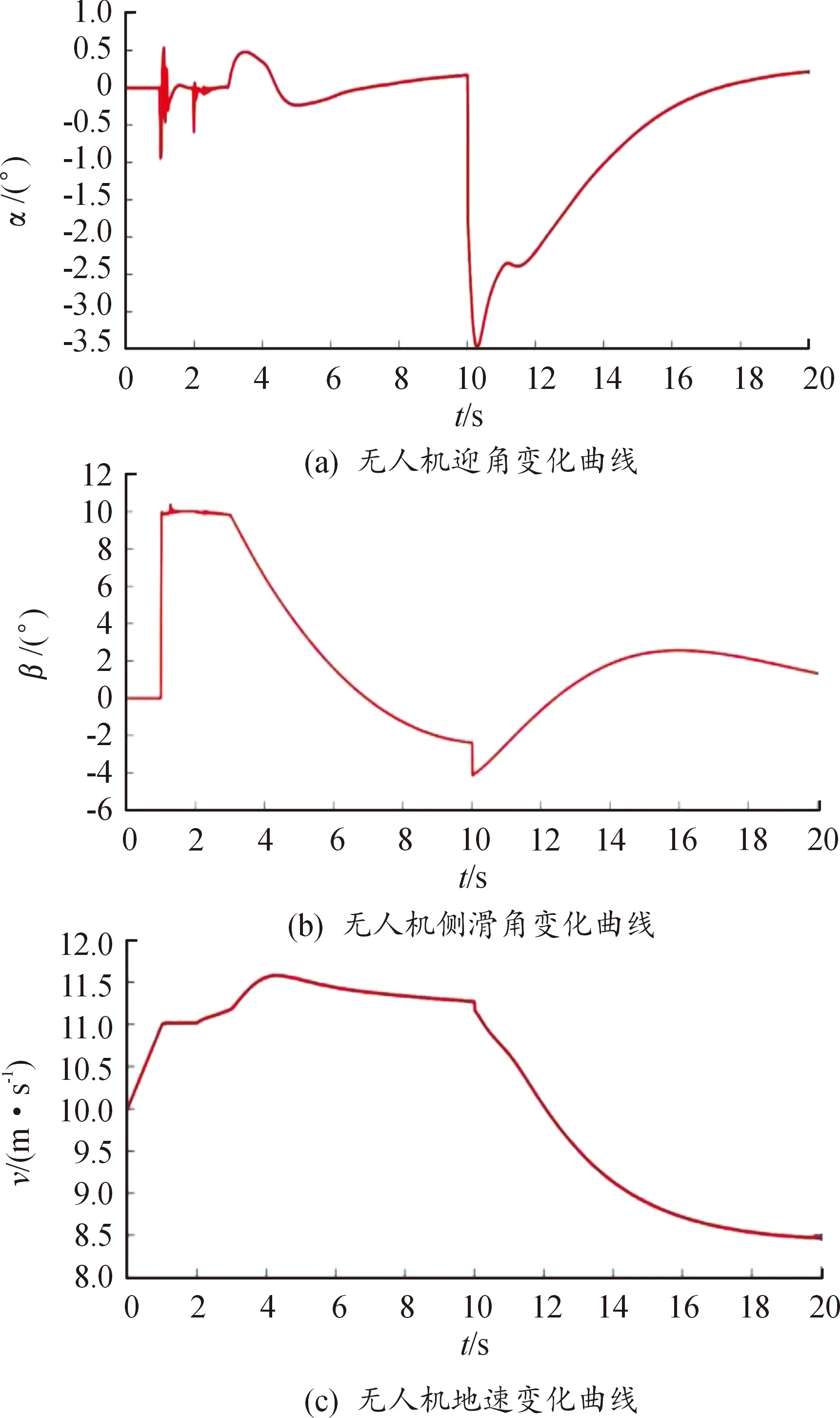
图18 工况①情况下无人机迎角、侧滑角及地速变化曲线
由图18可以看出,迎角最小为-3.474 8°,超过了给定的阈值。由于在车上时受车架约束,侧风作用下侧滑角基本保持不变,约为10.434 1°,未超出给定的危险边界,从车架上起飞后侧滑角在控制系统的作用下恢复至0°附近。这种侧风的突变会使得迎角发生突变且超过阈值,但不会导致侧滑角有较大的变化,迎角的突变导致无人机所受的相应的气动力发生突变,无人机在控制系统的作用下平衡载荷的突变,侧风的作用较大时,无人机会侧风的突变处于危险状态,基于以上分析结果,可以认为无人机受到反向突变的2 m/s侧风作用是不安全的。
3.4.20~10 s,侧风恒为2 m/s,方向90°,第10 s,风向改为180°
无人机在工况②情况下整个仿真阶段的迎角、侧滑角、对地速度如图19所示。
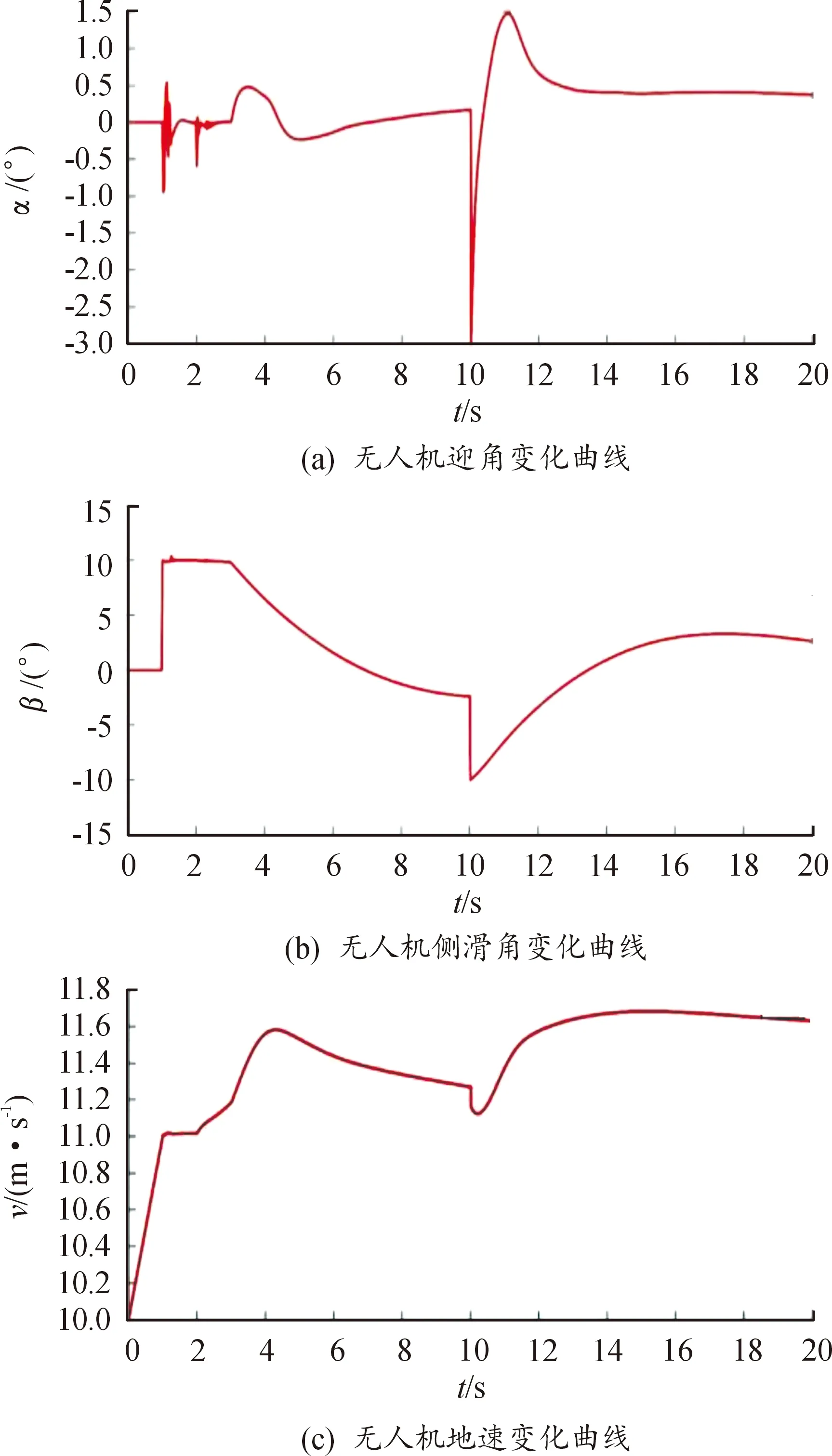
图19 工况②情况下无人机迎角、侧滑角及地速变化曲线
由图19可以看出,迎角最小为-2.973 8°,接近给定的阈值。由于在车上时受车架约束,侧风作用下侧滑角基本保持不变,约为10.434 1°,未超出给定的危险边界,从车架上起飞后侧滑角在控制系统的作用下恢复至0°附近。
第10 s时风向由90°变成180°时,风速与无人机速度叠加,使无人机对地速度超过11.6 m/s,无人机姿态控制系统提供的轴向、法向、侧向抗干扰力矩增大,从而使迎角、侧滑角未超出给定的危险边界。因此可以认为无人机受到180°方向突变的2 m/s侧风作用是安全的。
3.4.30~10 s,侧风恒为2 m/s,方向90°,第10 s,风向改为0°
无人机在工况③情况下整个仿真阶段的迎角、侧滑角如图20所示,由图20可以看出,迎角最小为-3.516 6°,超过了给定的阈值。由于在车上时受车架约束,侧风作用下侧滑角基本保持不变,约为10.434 1°,未超出给定的危险边界,从车架上起飞后侧滑角在控制系统的作用下恢复至0°附近。这种侧风的突变会使得迎角发生突变且超过阈值,但不会导致侧滑角有较大的变化,迎角的突变导致无人机所受的相应的气动力发生突变,无人机在控制系统的作用下平衡载荷的突变,侧风的作用较大时,无人机会侧风的突变处于危险状态,基于以上分析结果,因此可以认为无人机受到0°方向突变的2 m/s侧风作用是不安全的。
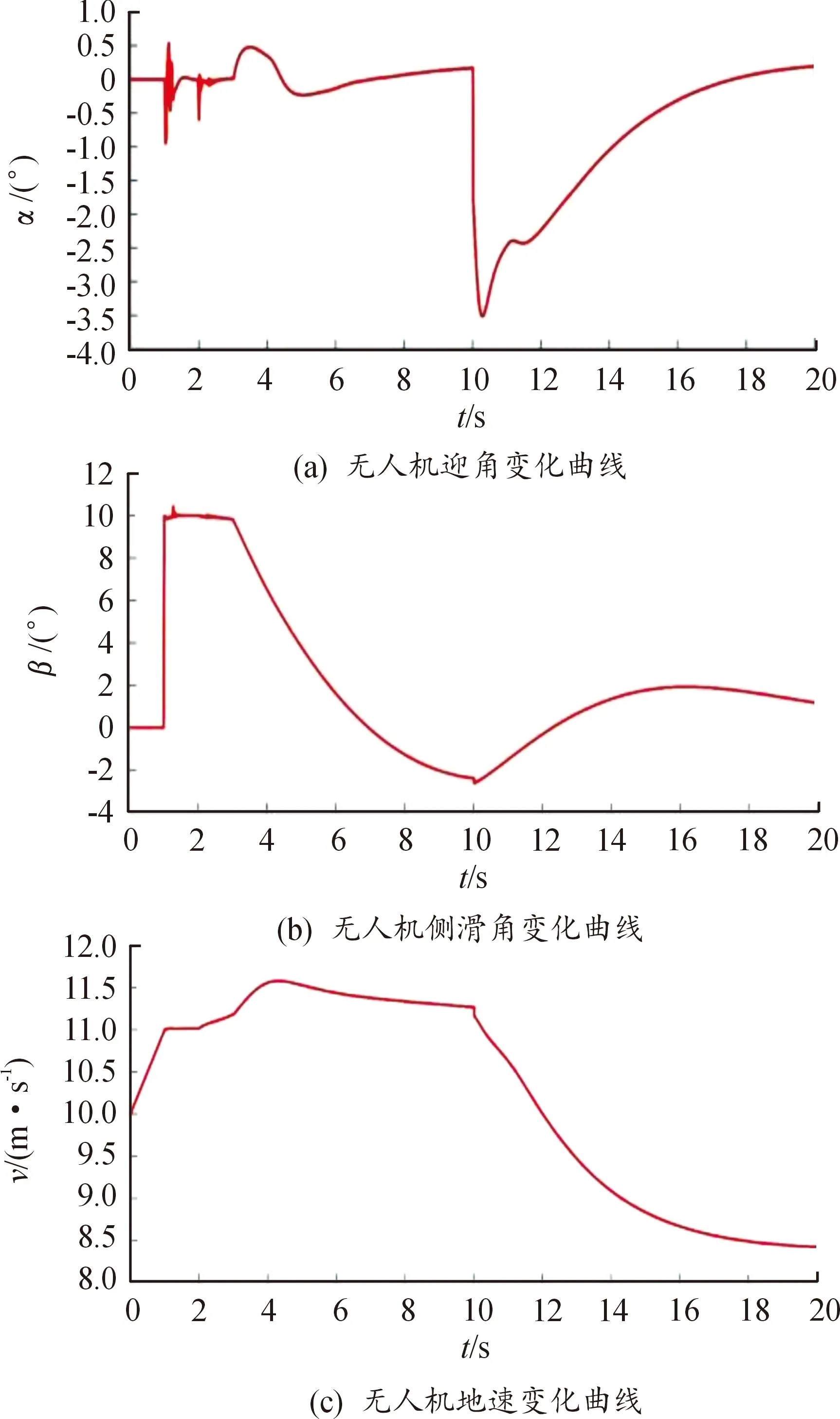
图20 工况③情况下无人机迎角、侧滑角及地速变化
通过对各个工况的仿真计算,可以得到以下结论:
1) 两侧电磁铁释放间隔50 ms的情况下,电磁锁机构同步释放对无人机有/无侧风作用下的起飞影响均可忽略不计。
2) 根据三角函数关系换算,侧风2.3 m/s时侧滑角恰为12°,无人机可以正常起飞的恒定侧风阈值为2 m/s;当其受2 m/s,90°侧风作用时,出现风速相同的0°,270°切变风均会导致无人机的迎角超过阈值,出现180°切变风则能安全起飞。
4 结论
本文中针对无人机辅助起飞装置方案进行多体动力学仿真及优化设计工作,验证了车载辅助起飞装置在给定起飞条件下的可行性和安全性,主要计算结论如下。
1) Admas动力学计算与飞控程序的匹配性较好,无人机姿态与飞控程序得到的姿态差异较小。
2) 给定最大50 ms间隔下,电磁锁机构不同步释放对无人机起飞影响可忽略不计。
3) 路面不平顺在车推阶段对无人机姿态的影响较小。
4) 恒定侧风影响下当无人机达到11 m/s速度释放起落装置处的约束,可以正常起飞的恒定侧风阈值为2 m/s;当其受2 m/s,90°侧风作用时,出现风速相同的0°,270°切变风均会导致无人机的迎角超过阈值,出现180°切变风则能安全起飞。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
百科探秘·航空航天(2020年8期)2020-07-29 09:06:03
军民两用技术与产品(2019年12期)2020-01-19 05:13:00
民用飞机设计与研究(2019年2期)2019-08-05 01:33:42
电子测试(2018年23期)2018-12-29 11:11:36
中国公共安全(2017年7期)2017-10-13 08:18:11
计算机测量与控制(2017年6期)2017-07-01 16:24:24
科技传播(2014年4期)2014-12-02 01:59:42
教练机(2013年3期)2013-10-11 02:30:30
