基于深度学习与ROS 的无人巡检车辆设计与实现
2023-10-09 09:41郑乾坤仪淼淼原杨
科技与创新 2023年18期
郑乾坤,仪淼淼,原杨
(1.中国船舶重工集团公司第七一三研究所,河南郑州 450000;2.汝州职业技术学院,河南平顶山 467500)
通过对中国电力发电模式及占比的调研,在中国的所有电力系统中,火力模式发电仍然有着较高的占比。从对火力发电厂地管理及实时检测的角度来看,该场地有以下2 个特点:①安全性。安全性是保障人员进入的必要条件。②数据采集简易且重复度高。基于此,可以利用机械方式来代替工人进行重复工作[1]。
1 系统概述
通过对该系统背景的分析,提出一种基于深度学习与ROS 的车辆巡检系统[2-3]。该系统主要由机器人控制系统、机器人操作系统、图像识别系统、视觉感知系统组成[4-5],系统架构如图1 所示。
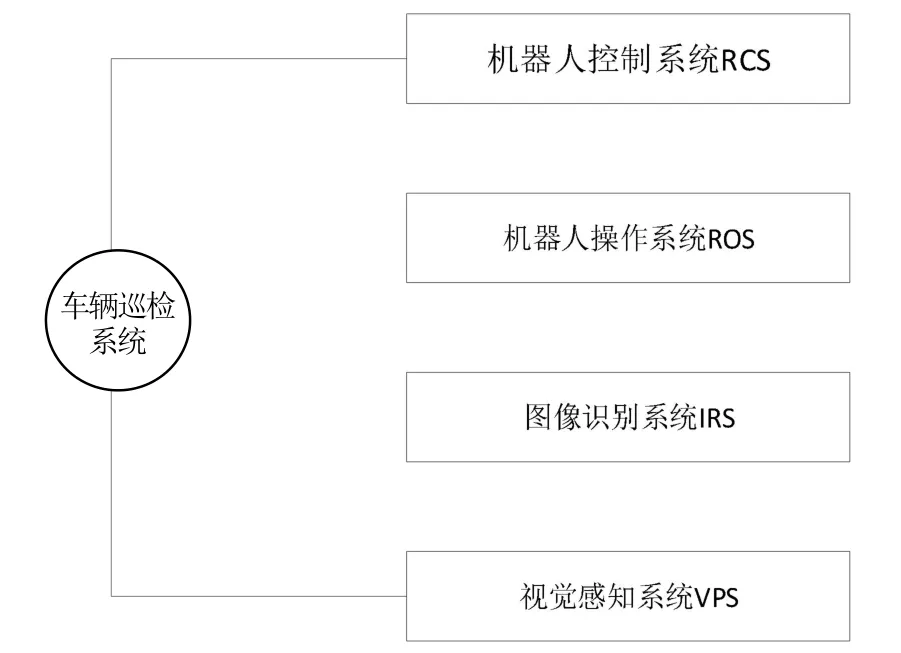
图1 车辆巡检系统架构
2 系统功能
通过对系统功能进行分析,基于深度学习与ROS的车辆巡检系统主要包括以下3 部分具体功能[6]。
2.1 机器人控制系统与机器人操作系统功能
机器人操作系统与机器人控制系统两者相互配合使用,用于控制小车的行进、仪表读取及避障等。
2.2 图像识别系统功能
图像识别系统通过实时获取高清相机读取的仪表图像数据,使用深度学习图像处理算法对图像进行位置纠正、特征提取、图像识别等处理,智能获取仪表指针等位置特征信息[7-8]。
2.3 视觉感知系统功能
视觉感知系统主要包括以下部分:①速腾激光雷达-16。本系统中采用了速腾16 线的激光雷达,电磁能量脉冲覆盖的区域是车辆360°的全部区域,对车辆的行进提供多种数据参数[9]。②高清相机。高清相机是读取仪表数据的重要方式,通过高清相机拍照,放入已经训练好的深度学习的模型中,识别出图片中的仪表数据[10]。③惯性测量单元。惯性测量单元在导航中可以用于更加精准的位置及更快的姿态调整[3,5]。
3 实验准备
3.1 实验流程
实验流程是车辆巡检系统调试过程的具体阐释,具体包括以下3 个步骤:①雷达设备调试与参数调试。通过外部链接,采用软件对雷达数据进行可视化展示,需调试雷达配置参数,如扫描角度、传输端口等,同时需要地图录制与建模。②配置地图以及参数预设。设置车辆行进地图的相关参数,如采用地图的名称、地图服务器等[11]。③参数调校。了解诸多参数的含义,根据车辆在调试过程中出现的问题进行多项参数更改,并在调试的过程中做好记录。
3.2 技术补充
在无人车巡检时,车辆的状态估计是相对复杂的问题,针对该问题主要采取了扩展卡尔曼滤波策略,下面对扩展的卡尔曼滤波及相关知识进行补充[7]。
3.2.1 线性高斯系统
线性高斯系统是一种用于描述线性数据的方法,从运动方程和观测方程中可以得出,两者均是线性的,2 个噪声项服从零均值的高斯分布[8]。但是在实际的应用中,需要更多考虑到离散的情况,离散事件线性时变系统运动方程和观测方程为:
式中:A、C分别为转移矩阵和观测矩阵。
针对线性高斯系统的后续计算,可以采用卡尔曼滤波器的方法,利用Bayes 公式计算后验概率,卡尔曼滤波主要针对线性系统,即从Xk-1估计Xk的无偏差最优估计[6]。
Bayes 公式为:
式中:P(A|B)为后验概率的数值;P(B|A)为似然值;P(A)为先验概率的数值。
线性高斯系统对于线性问题可以很好地似然估计,但是在现实世界中很多数据都不是线性的,仅采用线性高斯系统难以解决。
3.2.2 扩展卡尔曼滤波
线性高斯系统无法对非线性数据进行处理,究其原因是高斯分布经过非线性变换后不再是高斯分布,对于扩展的卡尔曼滤波来说,采用了高斯分布尽可能去近似数值。扩展卡尔曼滤波是在非线性-非高斯系统下的直接扩展[9-10],原理主要由2 个部分构成:①在工作点附近取值,对系统进行线性近似;②在线性系统近似下,把噪声项和状态都当成了高斯分布,即可利用均值和协方差矩阵预估值进行状态描述。
经过以上的近似操作后,后续的处理与卡尔曼滤波类似,公式如下:
上述偏导数在工作点处取值来对系统进行线性化近似,近似于一个线性系统。
3.2.3 A*算法
在导航的应用中,全局路径规划采用了A*算法。从本质意义上说,A*算法是基于迪杰斯特拉算法进行改进的算法,迪杰斯特拉算法的时间复杂度为O(n3)。A*采用了启发式搜索的策略,路径规划的效率有了显著的提升,该算法流程如图2 所示。
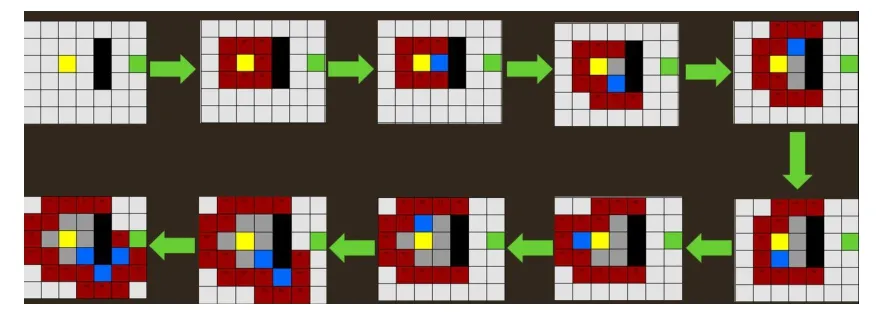
图2 A*算法流程说明
3.2.4 导航模块
导航模块主要基于ROS 环境,主要采用了4 个功能包[12],具体如下:①Move_base。用于无人车导航,也参与多传感器的融合,该功能包的导航架构如图3所示。②AMCL。在运动的过程中对无人车的位姿进行概率估计。③Map_server。用于地图的保存。④Gmapping。用于建立地图,地图示例如图4 所示。
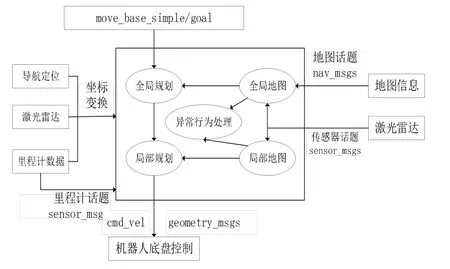
图3 Move_base 功能包导航框架
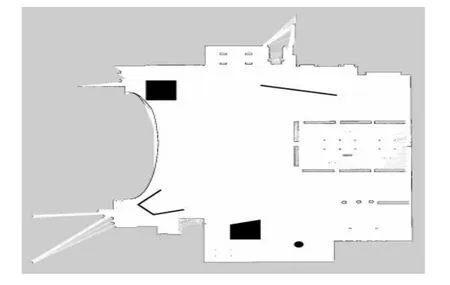
图4 建立地图
3.3 重要参数说明
在调试无人车的过程中,有一些路径规划相关参数需要说明,具体包括路径规划相关参数、代价地图相关参数和IMU 参数说明。路径规划相关参数包括全局路径规划(如表1 所示)及局部路径规划[11](如表2 所示)。
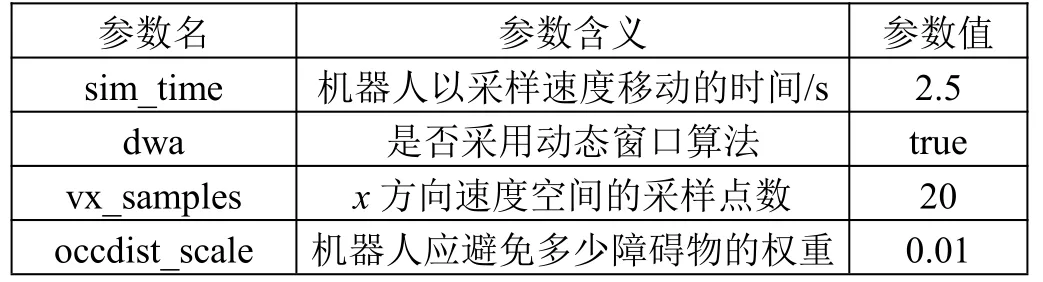
表1 全局路径规划部分参数

表2 局部路径规划部分参数
4 实验
4.1 实验环境
实验环境如表3 所示。
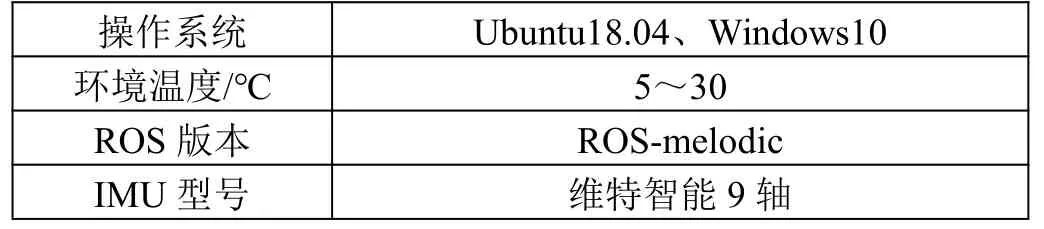
表3 实验环境
4.2 实验结果
一次实验定义为在固定区域每次进行5 圈巡检,每一圈中设置4 个巡检点,在第一次巡检时记录小车停止的位置,同时记录每次后续圈小车停止的位置,分别求得4 个巡检点每次5 圈参数设置的方差和标准差。在参数设置中,设置了弧度误差与位置误差,其中前者为0.1 弧度,后者为0.05 m(弧度与位置参数设置需要搭配高清相机的扩展角度),后续均以此为基准进行计算。经过多次实验及参数调试(详细参数设置可以参照3.3 节),从方差与标准差(均保留2 位小数)的评价指标中,得出的实验结果如表4 所示。
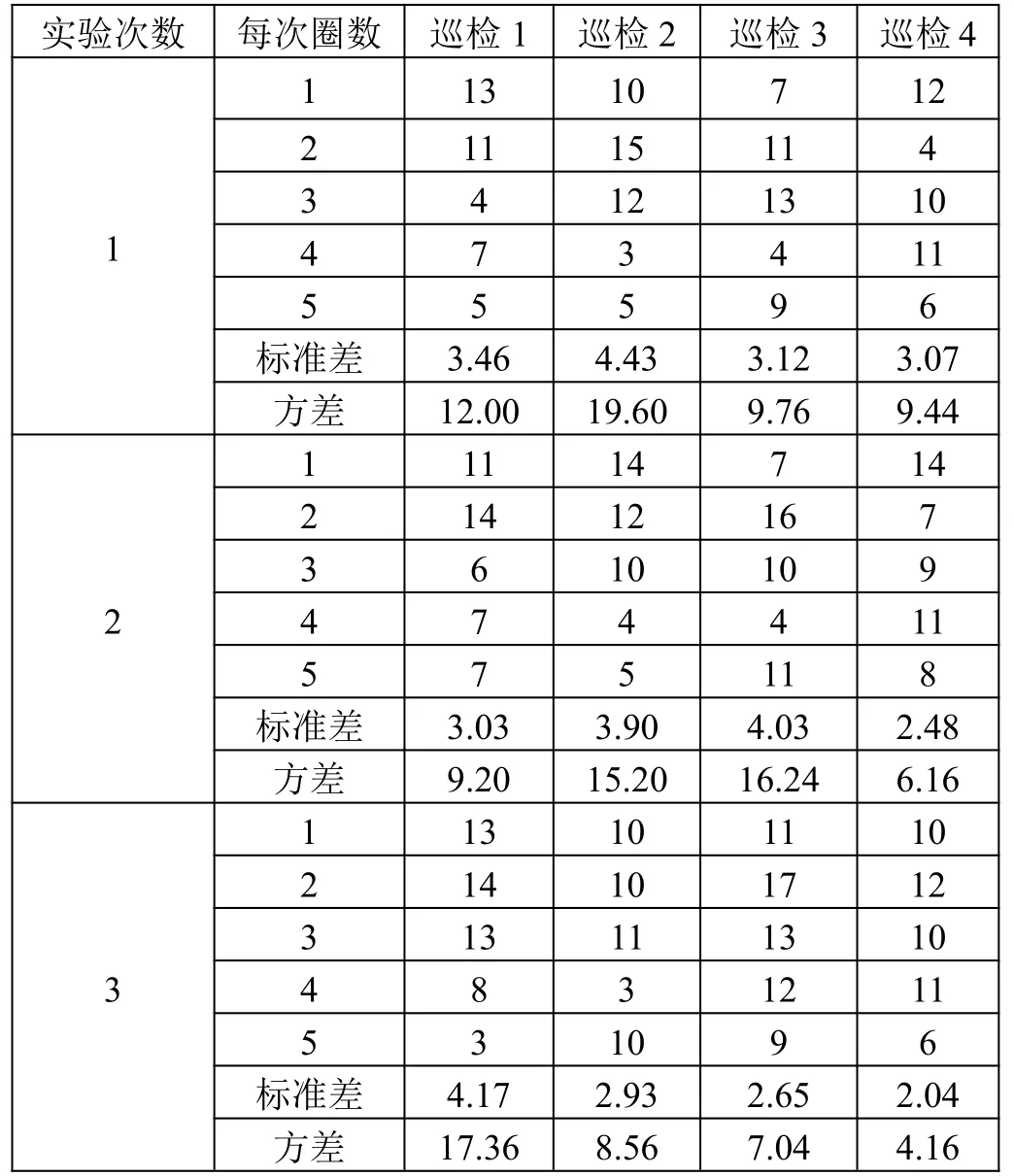
表4 实验结果
5 结束语
本文主要进行了深度学习与ROS 的无人车辆巡检系统设计与研究,利用无人车辆对封闭厂区进行巡检,代替人工巡检。本文针对封闭厂区这种特定场景进行了多次巡检实验,从实验结果来看,基本可以满足基本的工业需求,并对后续机器人操作系统的设计与应用提供一定的参考。
猜你喜欢
数字通信世界(2021年3期)2021-04-09
湖北理工学院学报(2020年4期)2020-08-22
电子制作(2018年12期)2018-08-01
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
计算机应用与软件(2017年4期)2017-04-24
电子制作(2017年19期)2017-02-02
当代化工研究(2016年6期)2016-03-20
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22