
ODE-热方程级联系统的事件触发控制
2023-10-04 09:25宗西举郑泽阳徐秀妮
控制理论与应用 2023年8期
杨 辉,宗西举,2†,郑泽阳,徐秀妮
(1.济南大学自动化与电气工程学院,山东济南 250022;2.济南大学信息科学与工程学院,山东济南 250022;3.陇东学院电气工程学院,甘肃庆阳 745000)
1 引言
随着传感器技术、人工智能技术和分布式网络的迅速崛起,多智能体系统(multi-agent systems,MAS)成为控制科学和人工智能等领域的研究热点,引起了广大学者的关注[1].智能体之间的信息交互通过网络拓扑结构进行,相对于单个个体(智能体)而言,多智能体系统具有更强的控制能力和协调能力,从而能够解决单个个体无法实现的功能,因此被广泛应用于电网经济调度优化、无人机编队联合侦查与搜索、卫星集群通信、智能交通与物流等领域.多智能体系统的协调控制研究包括多个方面,如编队控制、同步稳定、蜂拥控制等,而其中最基本的问题是多智能体系统的一致性问题[2-6].
一致性问题的研究成为各类企业提高生产率的关键,蓝宝石生产工艺便是其中之一.工业蓝宝石是氧化铝的晶体,是国民经济、国防工业和科学技术发展必不可少的基础材料和重要的战略物资[7].在蓝宝石结晶初期,融融状态的蓝宝石引晶点处温度检测和控制对后续整个结晶过程起到至关重要的作用,由于工业蓝宝石的熔点温度为2050◦C,所以目前不存在有效的自动温度检测手段与检测设备来获得如此高温,工程中现行的检测方法是利用一根细长的、外部包裹了透明合金材料的晶体深入加热炉内,并置细晶体棒的一端于熔融状态的蓝宝石中心上方2 ∼3 cm,通过人眼不定期地观察晶体棒端点来近似估计熔融状态蓝宝石中心的温度.
很多蓝宝石企业,为了提高成产效率,引入了多智能体系统.在工业生产中,将多台加热炉联接成网络,通过控制其中部分加热,利用加热炉之间的信息传递,可以实现自动化与网络化同步控制,既能节约成本又能提高生产效率,这就是本文要研究的网络化系统的状态一致性控制问题.
目前,一方面由于实际工程中许多系统模型均不能质点化,并且一、二阶常微分方程(ordinary differential equation,ODE)建模的多智能体系统相对完善,但基于偏微分方程(partial different equation,PDE)建模的多智能体系统的研究没有得到同样程度的重视,所以在这方面存在很大的挖掘空间[8-10].一般来说,利用ODE或PDE对一些系统建模都不能完美的接近实际的模型,但ODE与PDE相互耦合的级联系统却能完美的逼近实际系统[11-13].其中,由于大部分实际工程的需要,如水利、钻井、电加热炉等常见工业生产模型,其分布参数控制系统往往需要在边界耦合集中参数控制系统.并且大部分都是通过对边界进行控制.正如文献[14]研究了麦克斯韦方程与热方程的耦合;文献[15]用一类ODE与KDV(korteweg-de vries equation)方程边界级联的形式,来简化存在机械振动的潜水波模型;文献[16]利用反映-扩散-对流方程对冶金固定床内部颗粒发生化学反应的动力学行为进行建模.所以本文选择ODE-热方程级联的方式对蓝宝石加热炉进行建模.
另一方面,由于实际传感器测量速度的限制,网络带宽限制以及系统处理速度等各类因素的限制,显然连续时间控制器很难满足控制要求,而离散信号是很容易获取的,并且连续时间控制器的离散和采样已成为有限维多智能体系统的研究热点[5,9].虽然出现了许多优秀的控制方案,但触发频率较高,仍然可能会造成计算资源和能量的不必要损耗.为了解决上述问题,受到文献[10,17-18]等文章的启发,针对ODE-热方程建模的加热炉多智能体系统,为降低控制器的要求,本文提出了事件触发控制方案,并利用Lyapunov函数验证在事件触发条件下该系统的稳定性.
本文所考虑的热方程左边界为Neumann边界条件,与ODE系统耦合,右边界为绝热边界条件,采用这种方式对系统进行建模,更加符合实际工程,并且所有智能体通过全联通有向拓扑进行通信.设计了ODE-热方程级联系统的同步控制器与事件触发的同步控制器,与之比较,事件触发控制值只在触发时刻进行更新,很大程度上,节约了计算资源,降低了控制器的负载.通过Lyapunov稳定性分析,证明了误差系统可以收敛到一致的值,选取5个智能体进行仿真验证,证明了事件触发控制器的有效性.
2 问题描述
2.1 代数图论
为了便于研究多智能体系统,研究学者引入了图论知识G=(V,E,A),用于分析所有智能体之间的信息交换,其中节点集V={1,2,···,N},代表系统中的每个智能体;边集E=V×V,表示智能体之间的通信连接.Ni={j ∈V:(i,j)∈V},代表智能体i的邻点集.邻接矩阵A=[aij]∈Rn×n表示节点之间的连接关系,其中aij=1表示节点j能够获取节点i的信息,否则aij=0.度矩阵D用来描述与之连接的所有节点的连接度.定义节点Vi的入度为deginVi=那么在图G的度矩阵D=[Dij]中,Dij=0,∀i≠j且Dii=degoutVi[8,18-19].
2.2 模型描述
在竞争激烈的今天,每个细节都能决定企业的成功与否.其中制药工程、晶体结晶、发酵工艺等都对温度有严格的要求.正如蓝宝石工艺,在加热的过程中,会形成固体与液体交接的情况.蓝宝石的温度分布应该保证固体与液体交接点的变化满足工程实际需要,即固体与液体交接点的变化速度不能过快或者过慢,否则会导致蓝宝石结晶过程中晶体因受热不均而发生炸裂,或者与加热炉粘连,从而影响晶体质量.然而蓝宝石加热炉是通过给外部的钨棒网通电进行加热的,所以最终目的是通过改变钨棒网的电压来实现温度控制,从而使固液交接点处的温度分布均匀,其加热炉如图1所示.
图1中: 1表示CCD摄像机;2表示目镜;3表示旋转挡板驱动;4表示旋转挡板把手;5表示挡板;6表示隔热层;7表示孔洞;8表示提拉杆;9表示坩埚壁;10表示籽晶;11表示钨加热器;12表示炉壁;13表示熔融状蓝宝石.
利用各向同性性质,归一化处理后,可以将熔融状态的蓝宝石温度分布用抽象的一维反应扩散方程近似描述,因此系统模型可表示为
其中:N为智能体的个数,i表示第i个智能体,z(t)表示电源控制器内部的状态变量和加热炉内钨棒网的温度,ω(x,t)为蓝宝石溶液在x位置t时刻的温度分布,其状态空间为H:=L2(0,1),x表示空间坐标.通过对电源z(t)的控制改变蓝宝石温度分布ω(x,t)以保证固体与液体交接点x的变化满足工程实际需要.钨棒网与溶液边界直接耦合,由于位置x的对称性,交接点两侧的温度近似相同,所以交接点不存在热交换,因此可以将另一侧边界假设为绝热条件.
根据图论知识,针对具有N个智能体的多智能体系统,第i个智能体的状态为ωi(x,t),若系统中每个智能体的状态都达到一致,需要满足
本文目的是通过控制电源,最终使所有状态能够自发的达成一致,也就是说,液体热量最终能够在各个位置相同.接下来将设计通信交互协议,并证明该通信协议能够使系统稳定,并给出了事件触发控制方案,从而能够节约成本.
假设1假设系统(1)的连接方式由全联通有向拓扑图G=(V,E)来描述.图G的拉普拉斯矩阵L可以表示为
或常用L(A)=L(G)来表示图G的拉普拉斯矩阵.
定义1设X是线性赋范空间,X上的单参数强连续有界线性算子族T(t)称为算子半群,简称C0半群[20].对任何t>0,T(t)都是线性有界算子,且满足
定义2在线性赋范空间X上满足‖T(t)‖≤1,∀t≥0的C0半群称为压缩C0半群.
定义3线性赋范空间X上一线性算子A称为耗散的,如果对任意x ∈D(A),∃x∗∈D′(A),使Re〈Ax,x∗〉≤0,若A还满足R(λ-A)=X,∀λ>0,则称A为耗散的[21].
定理1设A是线性赋范空间X中的一稠定算子,则以下条件等价:
若A是耗散的,且∃λ0>0使得R(λ0-A)=X,则A生成X上的压缩C0半群.
若A生成X上的压缩C0半群,则A是耗散的,且R(λ-A)=X,∀λ>0,此外
2.3 一致性控制协议设计
由于级联系统存在耦合的边界条件,传统的ODE或PDE的多智能体一致性控制已不能满足需求,若继续使用传统的一阶多智能体控制器的设计形式,稳定性证明时则会产生不稳定的耦合项,因此本文根据级联系统特性重新设计一致性同步协议并予以证明.
对于型如系统(1)的多智能体ODE-热方程级联系统,设计控制器
其中:c>0,k>0均是常数,L是拉普拉斯矩阵,I表示单位矩阵,ω(x,t)和z(t)均为N维向量,将控制器(2)代入系统(1),可以得到级联系统如下:
引理1(文献[8]引理3.1) 对于任意的z(t)∈(0,∞),ω0(x)∈H2(0,1),系统(3)存在唯一解ω(x,t),使ω(x,t)∈C1(0,∞;L2(0,1))∩C(0,∞;H2(0,1)).此外,通过H2(0,1)⊂C[0,1],那么ω(1,t)对于时间t>0是连续的、有界的.
考虑状态空间
定义内积如下:
将方程(3)写为发展方程形式如下:
定理2算子A在空间H上生成压缩C0半群.
在式(6)中,计算可以得出
因此得出算子A在空间H上是能量耗散的,由于初值条件给定,其具有唯一解,因此可以得出A-1存在.根据Sobolev嵌入定理得出A-1在H中是紧的.利用定理1(Lumer-Phillips)可以得出,算子A在空间H上生成压缩C0半群.
本文的目标是使系统同步,分析可知同步的一个充分条件是使边界无能量流动,同时使得所有状态趋近于0.又由于边界绝热条件的充分条件是使ODE部分收敛到0,因此初步分析ODE部分特征值需要为负,而热方程部分系统的特征值所在空间仅有一个零特征值,其余为负.根据以上思路设计的控制器(2).
接下来证明在控制器(2)作用下系统的稳定性,定义Lyapunov函数如下:
通过LaSalle不变集原理,可以找出有且仅有一个稳定解收敛,即系统状态最终可以达成同步
以上是连续系统ODE-热方程级联系统的控制器及闭环系统的证明.下文将设计事件触发控制器的控制规则,并证明该系统依然保持收敛性能.
3 事件触发控制器设计
上文提到的控制器是时间连续形式的,但是连续控制需要在时间尺度上,不间断的采集并获取信息,同时需要实时不间断的对信息进行处理.由于目前广泛应用的数字式执行器执行测量、运算或输出等操作均有最小时钟周期限制,因此数字式执行器无法做到无限小时刻采样并对信息进行处理.为解决数字式控制难以处理连续性控制的缺点,所以本文提出事件触发的ODE-热方程级联系统一致性控制协议,给出具体的触发条件,在达成触发条件时改变控制输入的值,而其余时刻则保持之前状态不变.这样不仅仅能够解决连续性控制的缺点,同时还可以节约控制器的计算资源.
下面介绍事件触发控制器的设计,以及触发条件的确认.根据第2.3节得出的一致性同步协议可以假设ODE-热方程系统事件触发控制器如下:
其中:u(t)为ODE-热方程级联系统事件触发控制器,t∈[tk,tk+1),∀k=0,1,2,···且t0为初始时刻,触发间隔时间点tk满足
其中: argmin表示‖e(1,t)‖和‖ϵ(t)‖达到最小值时t的取值,∀σ1,σ2∈R+满足条件
为便于证明在事件触发控制器作用下系统仍保持稳定,首先引入误差系统
将误差状态(15)代入式(12)中,可以得到控制器在触发时刻的误差表示形式
为了证明控制器(16)能够使系统(1)的每个子系统保持稳定,并能够使各个子系统最终状态达成一致,利用Lyapunov稳定性判据对事件触发系统进行稳定性判别.
设计Lyapunov函数如下:
对上式左右两边关于时间变量求导,可得
结合耦合边界条件cz(t)=ωx(1,t),可以得出
设∃σ1,σ2>0,满足以下不等式组条件:
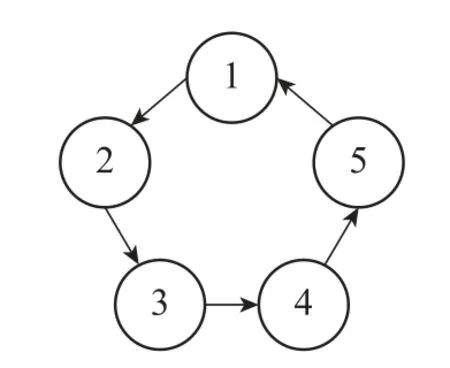
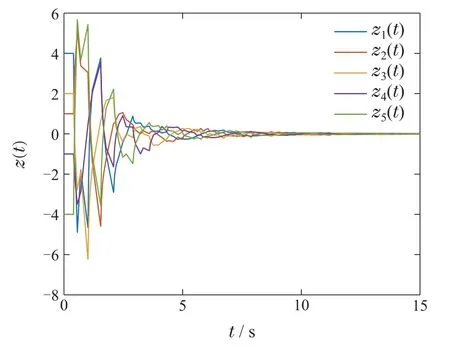
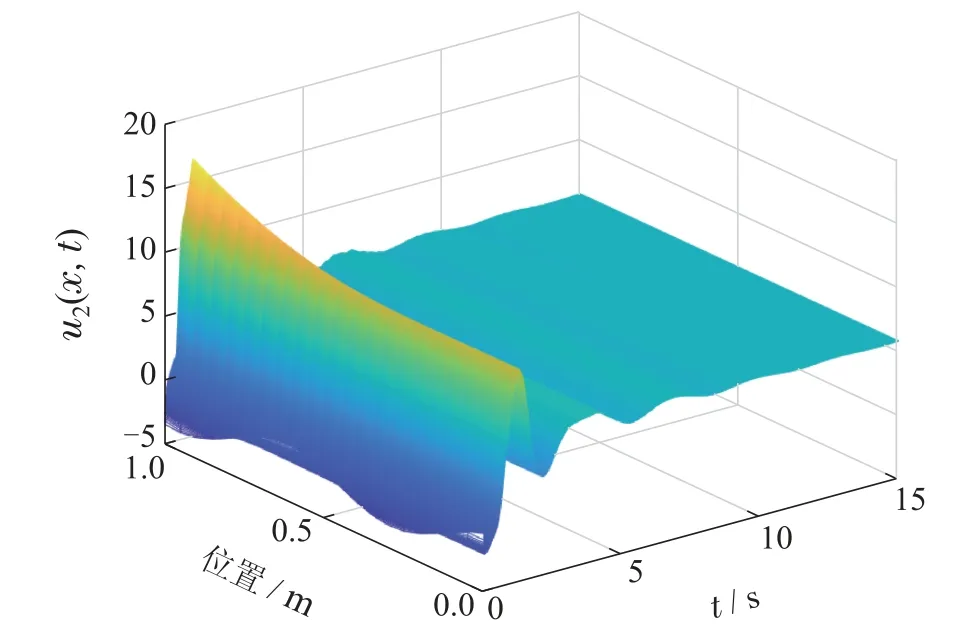
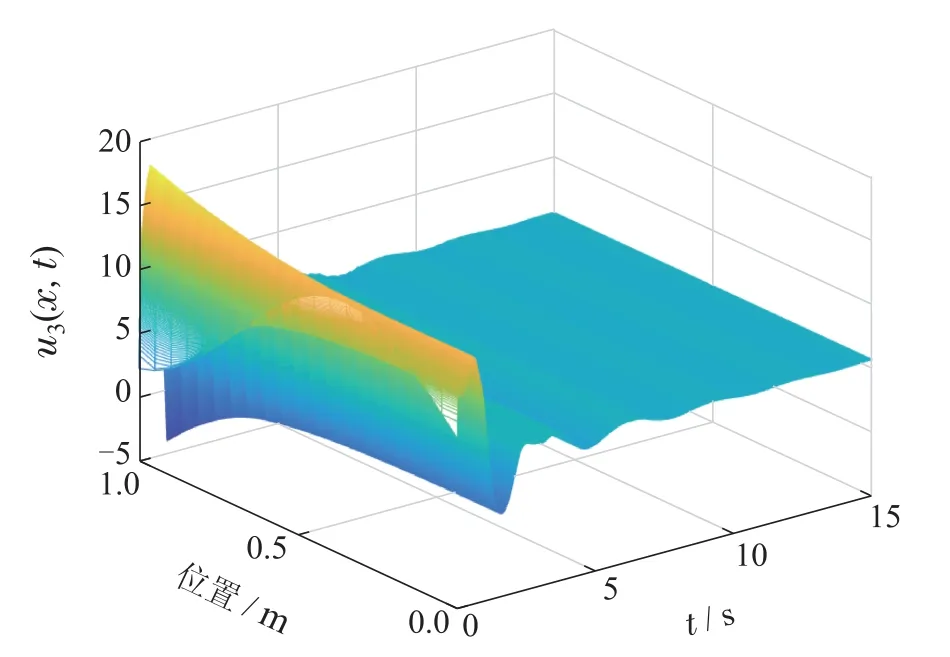
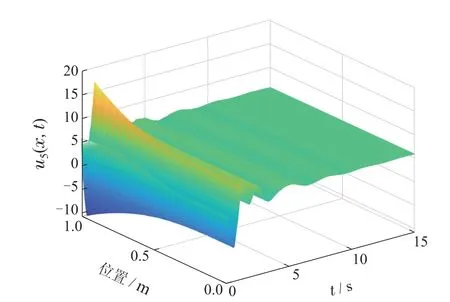
事实上,对于∀σ1,σ2∈R+,总是至少存在着一组解满足不等式组(20),这是很容易得出的,因为前两个不等式组在出发时刻‖e(1,t)‖和‖ϵ(t)‖都等于0.所以σ1,σ2>0即可满足要求.并且由于设定参数k>0,所以必然存在σ1+σ2 将假设的不等式组代入式(19),可以得出 根据Lyapunov稳定性判据可以得出,该系统是Lyapunov意义下稳定的,同时通过计算其稳定点所构成的不变集,容易得出最终有且仅有一个共同收敛的点,因此该ODE-热方程级联系统事件触发控制器最终能够使得系统(1)中的状态达成一致. 根据不等式组(20)的条件,对于k=1,2,···,以及σ1,σ2满足式(20)条件,设触发时刻为 通过上述证明,可以得出控制器u(t)在式(12)的作用下能够使系统(1)最终状态达成一致.由于PDE部分边界条件经由ODE中的控制器引入了负实部极点,因此系统具有一定的鲁棒性,即存在一定的扰动的情况下,系统仍然可以按照预期的目标达成一致,下面针对上述事件触发一致性协议设计计算机仿真程序来进行验证. 为验证ODE-热方程级联系统事件触发一致性控制协议的实际有效性,本文采用数字计算机平台进行仿真模拟验证.这里仿真离散格式中,对于空间采用中心差分法进行离散,时间采用前向差分方法进行离散化,ODE部分采用前向差分离散化.选取仿真步长dt=0.001 s,空间步长dx=0.05 m,仿真总时长T=15 s,PDE选取长度为1 m.设系统参数c=5,k=10/3.假设系统仿真的初值条件如下: 考虑多智能体个数为5,且为全连通有向拓扑,假设权重均为1,其连接方式如图2. 图2 多智能体连接拓扑图Fig.2 Multi-agent connection topology 通过上述假设的参数进行仿真,能够得出仿真所用控制系统如下: 因此根据本文所给出的计算方法,设计控制器 其中选取σ1=0.43,σ2=11.1.仿真结果如图3-10所示. 图3 多智能体系统ODE部分状态图Fig.3 Partial ODE state diagram of multi-agent system 图3描述了多智能体系统(24)中的ODE部分随时间趋向于0,其物理含义是为了最终使PDE系统能够稳定在一致温度下,热系统边界随着时间增加,其热流动逐渐停止.图4-8五个多智能体系统的PDE部分在边界耦合ODE系统的控制下,最终能够收敛到一致状态.图9-10表示了多智能体共同决策得出的触发条件,其中触发时刻用“*”着重标记.根据仿真结果可以看出,通过利用本文提出的基于事件触发的ODE-热方程级联系统多智能体一致性控制协议,能够使系统在大约12 s左右通过较少的触发次数达到同步,表明事件触发控制器具有优越的性能,能在很短的时间内让蓝宝石加热炉达到一致的工作状态. 图4 多智能体系统PDE部分状态1Fig.4 Multi-agent system PDE partial State 1 图5 多智能体系统PDE部分状态2Fig.5 Multi-agent system PDE partial State 2 图6 多智能体系统PDE部分状态3Fig.6 Multi-agent system PDE partial State 3 图7 多智能体系统PDE部分状态4Fig.7 Multi-agent system PDE partial State 4 图8 多智能体系统PDE部分状态5Fig.8 Multi-agent system PDE partial State 5 图9 多智能体系统事件触发条件1Fig.9 Multi-agent system event trigger Condition 1 图10 多智能体系统事件触发条件2Fig.10 Multi-agent system event trigger Condition 2 本文研究了基于事件触发的ODE-热方程级联系统多智能体一致性控制协议的设计,通过控制与PDE部分边界耦合的ODE系统的输入,使PDE部分的热系统最终能够稳定,快速的达成一致,进一步给出了事件触发控制的条件,通过仿真验证可以看出该同步协议具有一定的鲁棒性.相较于之前已有的成果来说,本文的创新在于采用不同的(Neumann)边界条件,控制输入和被控对象分别处于不同的系统,同步采用边界反馈,并证明了事件触发需要满足的条件及其稳定性,但因本文系统存在耦合项,Zeno现象的避免未能给出严格的证明,这将在后续的工作中进行.4 数值仿真验证




5 结论与展望
猜你喜欢
粉末冶金技术(2021年3期)2021-07-28
小学生作文(中高年级适用)(2017年5期)2017-07-10
儿童故事画报·发现号趣味百科(2017年1期)2017-06-01
电子制作(2016年15期)2017-01-15
红领巾·成长(2016年6期)2016-05-14
系统工程与电子技术(2016年2期)2016-04-16
文物鉴定与鉴赏(2015年6期)2015-07-06
电测与仪表(2014年1期)2014-04-04
电测与仪表(2014年1期)2014-04-04
石油工程建设(2014年5期)2014-03-20
