一种电缆沟盖板启闭机械装置在变电站中的应用
2023-09-29 01:28卢雨翔万梦怡喻小勇
江西电力 2023年4期
卢雨翔,万梦怡,喻小勇
(国网江西省电力有限公司超高压分公司,江西南昌 330000)
0 引言
在变电站内敷设电缆、检查电缆沟或电缆消防隐患整治等工作时,需要频繁将电缆沟盖板打开、关闭,电缆沟盖板的重量在30 kg至50 kg,在启、闭过程中,通常使用人工作业方式,作业人员通常使用定制的钢筋、戴手套等方式进行电缆盖板搬运,在涉及大量盖板启闭工作时,将会带来以下3 个问题:1)人工启闭方式效率低。由于盖板重量重,通过人工的方式无法持续搬运大量盖板。2)人工启闭安全风险较高。启闭盖板时,由于盖板重量大,人工启闭时存在砸伤手指、扭伤腰部等人身安全风险。3)人工启闭过程中存在盖板脱落风险,可能导致损坏或压坏电缆。
由此可知,在进行大量电缆盖板启闭工作时,人工启闭方式严重制约变电站电缆相关作业的工作效率,极端情况下,可能导致作业人员、电缆受到严重伤害。文中介绍了一种基于履带式机器人底盘和机械吊臂的装置,该装置采用遥控控制,可在变电站碎石、草地等路面行走,并具备一定的越障和爬坡能力。吊臂可随意拆装,与底盘结合,实现对电缆盖板的启闭,在提升电缆盖板启闭效率的基础上,确保人身、设备安全。
1 装置总体方案设计
梳理变电站内常见电缆沟盖板的尺寸、重量、厚度、敷设方式等参数,确定电缆盖板启闭装置的尺寸、载重、机械臂长度、行进方式等。确定采用履带式底盘结构和机械吊臂相结合的方式,具备在500 kV 变电站的碎石或草地上行走和基本越障的能力,并根据设备结构,确定本装置的系统结构,如图1所示。

图1 装置系统结构
该装置采取可拆卸结构,吊臂与机械底盘采用可拆卸结构,便于运输。吊臂采用“工”字型钢,具备一定的抗弯折强度,吊臂全重约30 kg,主要由绞磨电机、吊臂、吊绳、吊钩4部分组成,通过底座上4颗可拆卸M6螺栓与机械底盘连接。底盘主体由不锈钢材质组成,具备轻量化、结构强度高的优点,底盘内部采用中空结构,内部为电池仓、底盘动力系统、底盘液压转向系统。
2 执行与作业
2.1 行进机构
电缆盖板启闭装置的工作环境主要为变电站内,站内主要地形为水泥地、碎石地、草地和少量斜坡。为能够适应这些地形,常见的行进机构主要有轮式机构、履带式机构、腿足式机构,在不同地形上以上三种行进机构的通过性和稳定性各不相同[1],其主要区别如下:轮式机构优点在于行进速度较另外两种机构更快,对各类地形适应性高,缺点为通过台阶、基坑的越障能力较差;腿足机构的优点在于更能适用于复杂地形,在经过体积较大的障碍物时具备更强的通过性,但缺点是机构的速度慢,且控制系统结构复杂,各零部件更为精密,成本较高;履带式机构综合以上两类机构的优点,越障性、通过性较高,同时可适用于不同地形,制造成本较底,特别是在变电站内碎石、草地上具有更强的通过能力[2],但其缺点也同样明显,一是能耗较高,在用电池驱动过程时连续工作时间较短,二是整体重量大,由于要驱动履带、两对负重轮和两对行走,对驱动机构的负载能力提出较高的要求。
通过对以上三种机构综合比较,履带式机构具有支撑面积大,越障力和通过性强等优点。同时履带与地面相互作用,整体结构地面附着性增强,不易打滑,在跨越障碍、坡道或在碎石、草地行进等方面具备一定优势。因此选用履带机构作为电缆盖板启闭机器人的行进机构。
2.2 传动机构
传动机构是将电机产生的动力传递给行进机构的重要部件。现有的履带式行进机构的传动结构主要有:同步齿形带传动、链轮传动、齿轮传动等多传动方式[3]。同步齿形带传动的优点在于传动性能平稳、全重较轻、维护性强、传动齿轮精确定位等优点,但传动在载荷不稳定的情况下对载荷变动吸收能力较差。由于履带多用于橡胶材质,不适用于环境温度高、腐蚀性强的环境。链轮传动结构具有传动精确、效率高的特点,但缺点是传动平稳性较差、瞬时传动比不稳定等。齿轮传动具有传动效率高、使用寿命长、结构紧凑等特点,但在加工和制造时成本高,安装时精度要求高。
综合考虑电缆盖板启闭机器人的体积及工作环境和条件,该方案选定齿轮传动作为电缆盖板启闭装置传动机构的传动方式。电缆盖板启闭装置在碎石、积水等特殊路面和电缆盖板上进行越障或工作时,需要低速通过,而在平直路面行走时,需尽可能保持高速前进。对于这种情况,通常的解决方法就是采用轮履复合式结构,给轮与履带不同的驱动力,以达到不同速度的目的。
整个电缆盖板启闭装置动力由驱动电机输出,该动力模块为前驱式。其通常包括传动轴、减速器和传动链轮这三部分[4]。动力经由电机、减速器、传动轴、后置传动链轮、传动链、前置传动链轮得以输出,从而完成履带式机构的行进。
2.3 驱动系统
驱动系统是为电缆盖板启闭装置提供动力的主要部件,驱动系统的确定直接影响着电缆盖板启闭装置的行驶性能。目前,应用于履带式底盘的动力系统主要有液压、气动和电动。三种动力方式各有优劣,液压动力系统动力强,体积小,调速便捷,但液压系统成本高,受环境影响较大,可靠性低,维护保养难度高;气动机构成本较低,动作灵活可靠,但驱动力偏小,在需要调速、转弯等需要精确控制的场合适应能力较差;电动驱动系统具有控制精度高,输出扭矩大的优点,但满载长时工作时,性能较低。
综合对比三种动力方式,电缆盖板启闭装置将采用电动驱动方式,电动驱动方式具有动力稳定、传动效率高、体积小等特点,适合为电缆盖板启闭装置提供动力。电动驱动方式按照驱动电机不同可分为交流和直流两种。交流电机成本低,结构简单,需要借助变频设备来实现调速[5],,无法通过改变转速进行调速,在应用于电缆盖板启闭装置时,需要锂电池产生的直流电转化为交流电,使整个驱动模块设计更加复杂。因此选用直流电机作为电缆盖板启闭装置的首选驱动方式,它具有调速简单、转动力矩大、控制灵活、供电简单的优点。
2.4 执行机构
该装置中电缆盖板启闭装置的执行机构主要包括承重机构和外壳,其中外壳是电缆盖板启闭装置中核心电子零部件的载体。在承重机构上安装机械吊臂用于吊装电缆盖板[6]。对承重机构要求从强度和刚度上满足装置运行走时的加速、减速要求,同时又必须采用轻量化设计,因而采用碳钢作为承重机构主要材料。同时电缆盖板启闭装置的吊臂也固定在硬铝板上。承重机构中装有锂电池组、直流电机、驱动机构等部件来满足机械构造设计以及整个装置的重心要求,重心的高低将从根本上决定装置在起吊时的抗倾翻性能,重心越低那么抗倾翻性能越好,但越障能力越低。综上,装置的整体结构从前往后分为三个部分,前部为控制模块及核心二次元器件安装区域,中部为控制装置、直流电机、电机驱动装置、二次线缆线槽,后部主要为动力总成,包括锂电池、供电模块等。该装置的机壳采用碳钢,这种材料结构轻便而且易于加工,质量较轻,装配精度要求低,强度大,适合搬运电缆盖板等较重物件。
2.5 电缆盖板启闭工作过程
在工作时,通过吊臂遥控控制吊臂电动绞盘,将吊钩和吊带放至合适位置,操作人员将吊带和吊钩钩住盖板四个角,稍微收紧吊带,使得电缆盖板轻微受力,开展起吊检查。确认起吊前状态正常后,启动吊臂遥控,收紧吊绳,在盖板起吊过程中,着重观察吊臂和装置状态,发现异常立即将盖板放下停止作业。装置整体结构如图2所示。
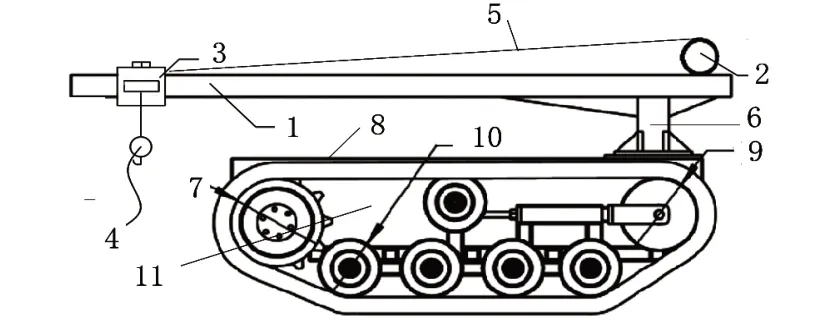
图2 机械装置结构图
起吊后,控制机械底盘向前(后)移动,将底盘移动到制定位置,并控制吊臂遥控将盖板放下,完成一次电缆盖板的开启过程,电缆盖板闭合过程与此相反。机械吊装的方式相比人工操作,提高了安全性,同时加快了工作效率。
3 遥控与控制平台系统设计与原理
控制系统主要由显示器、逻辑控制和显示、主控制器单元、轴控制器单元及电机驱动器构成。转向电机驱动器、动力电机驱动器及伺服电机分别为独立系统[7],三套系统在整个装置的机轴控制器单元的控制下可以完全确保三套电机的转速精度及稳定性。每个轴控制器单元可通过检验信号检验每个轴的扭矩,以此来组成每个轴系统的扭矩闭环控制系统,确保每个轴输出的扭矩精准、可靠。在设计中,每个轴控制器都是一整套以单片机为核心,叠加小电路等构成的一套专用控制模块。使每个动力电机可实现完整独立的数据采集、计算、存储、控制系统。在驱动过程中,可实现对每个直流电机的扭矩、角速度进行独立、实时地检测和控制,确保各电机的协同工作精度和稳定性。
系统框架图如图3 所示,配置了安卓开发环境,通过程序编写上位机软件。
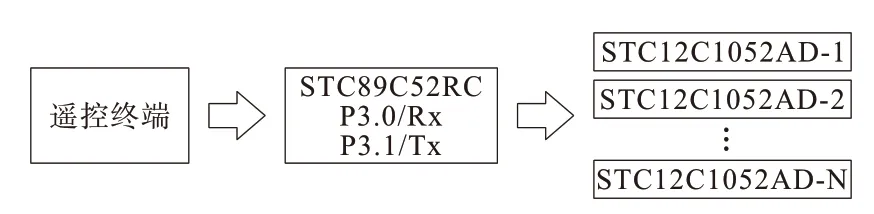
图3 系统框架
通过上位机给主控模块发送前进、后退、转向、吊臂上下活动的指令,遥控模块接收到信号后,进行数据处理,然后给电机发送指令。电机可以通过指令实现对电机的开关。其程序设计流程图如图4所示。

图4 程序设计流程图
4 结语
根据现有研发条件,针对变电站电缆盖板在启闭过程中存在的问题和不足,研制一种变电站电缆盖板启闭装置,减少人工搬运频次,降低人工启闭的安全风险,提升启闭过程中运行电缆的安全性。在未来,该套装置还可以在以下2个方面进行研究:
1)电缆盖板启闭装置的远程控制。随着网络时代的到来,远程工作变成了现实。网络的可靠性和实用性是实现自动启闭盖板远程控制的主要研发领域。该次研制的履带式底盘为无线控制,下一步可探索通过4G/5G网络控制机械底盘的运动。
2)探索可更换的执行机构,该次采用机械吊臂的方式开展电缆盖板启闭,后期可更换例如机械手臂、消防灭火装置、摄像头等多种设备,使其具备其他功能,丰富使用场景和拓展任务种类。通过快拆方式,快速更换相应部件并投入到相应任务中,实现一机多用。
猜你喜欢
中小企业管理与科技(2022年6期)2022-06-14
建材发展导向(2022年1期)2022-03-08
纺织器材(2021年5期)2021-11-11
石油和化工设备(2020年5期)2020-06-09
大陆桥视野·下(2017年8期)2017-09-19
纺织器材(2017年2期)2017-04-20
学习月刊(2016年19期)2016-07-11
专用汽车(2016年4期)2016-03-01
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28