基于风险区域划分的多策略智能消毒机器人
2023-09-27 10:42王若暄许亚岚
电子制作 2023年19期
王若暄,许亚岚
(中国石油大学(北京)信息科学与工程学院,北京,102249)
0 引言
自2020 年新型冠状病毒全球蔓延以来,人们逐渐重视居家环境以及人员密集公共场所的卫生安全,对环境的消毒杀菌需求与日俱增。全球相关企业针对消毒需求陆续开发了各种类型的消毒机器人[1~3],投用在医院、车站等公共场所,家用的消毒机器人也涌现出大量设计与制作[4~5]。本文以STM32 为主控,设计制作了一款基于室内风险区域划分的多策略消毒机器人,搭配两种消毒液,可对不同风险区域实施不同强度的过氧化氢雾化消毒,以及局部区域或物品的机械臂酒精喷洒消毒。
1 总体设计
本文设计制作的消毒机器人主要用于家庭或室内公共场所的日常消毒,包括过氧化氢雾化消毒以及快递、门把手等死角的机械臂酒精喷洒局部消毒。系统结构如图1 所示,选用STM32F407 作为控制器,主要包括以下3 部分:
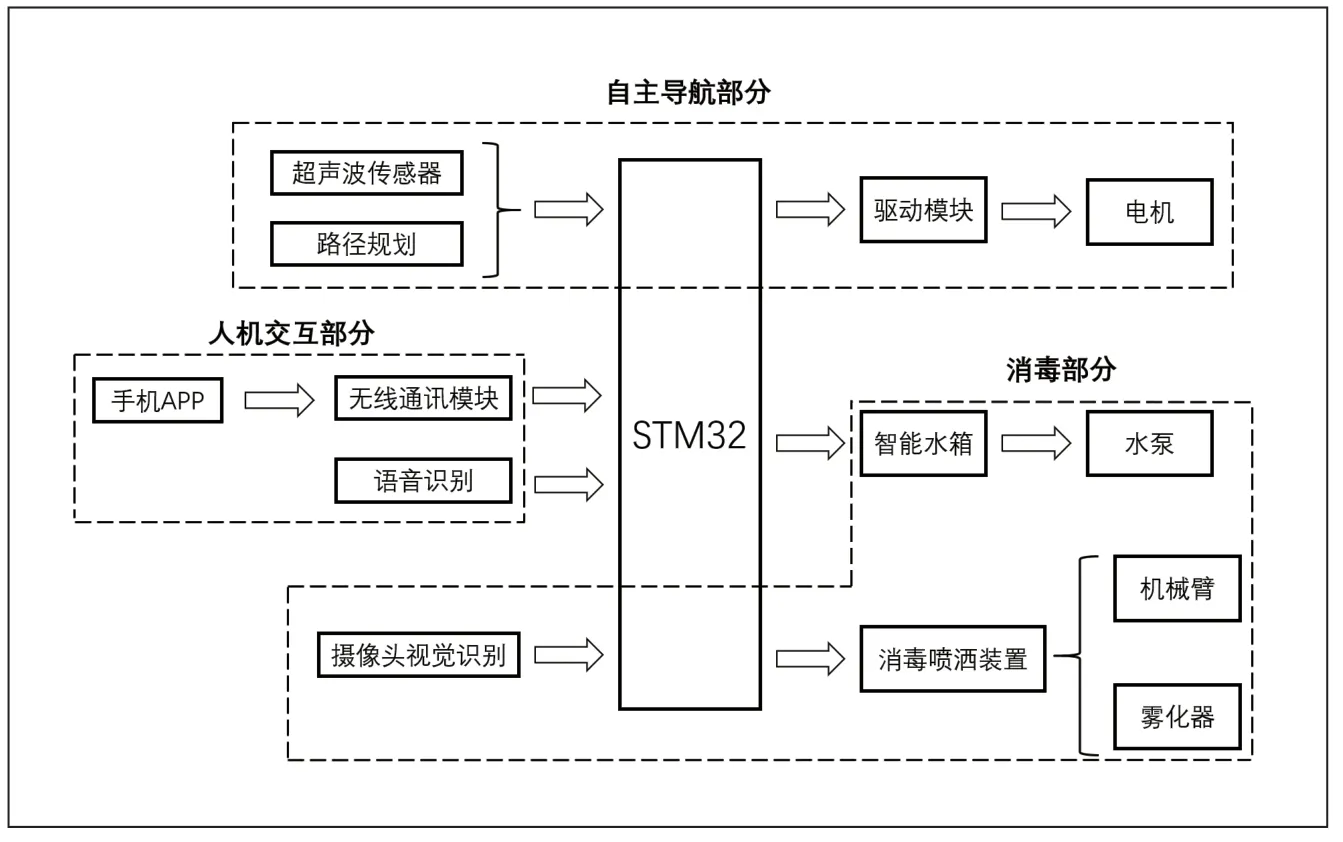
图1 系统结构图
(1)消毒部分:根据消毒方式设计机器人的结构,搭配视觉感知系统,控制机械臂的动作,实现对局部区域或物品可调强度和范围的酒精喷洒消毒。
(2)自主导航部分:根据规划路径自主导航,自动避障,通过颜色识别消毒区域的不同风险等级,调整机器人行驶速度和过氧化氢雾化强度。
(3)人机交互部分:实现了用户语音和手机APP 远程监控消毒两种控制模式。
2 消毒部分
■2.1 消毒方式与机器人结构
过氧化氢消毒适宜在有人的环境中进行大范围的喷洒消毒,消毒效果显著且对人体没有危害;酒精溶液易挥发消毒效果好,但由于酒精为易燃易爆的物质,不可大范围喷洒,但可以在小范围定点消毒起到较好的作用。本文采用Shapr3D 软件设计制作图2(c)所示的双格消毒溶液箱,前侧①为酒精溶液箱,放置潜水泵和消毒酒精。当检测消毒物体较小时,控制器改变PWM 占空比,使潜水泵排出酒精量减小,反之,增多酒精量。后侧②为过氧化氢溶液箱,设计固定棉条的圆柱区域,在③处安装雾化片,使过氧化氢溶液能够以水雾形式喷洒至空气,实现对空气环境消毒。
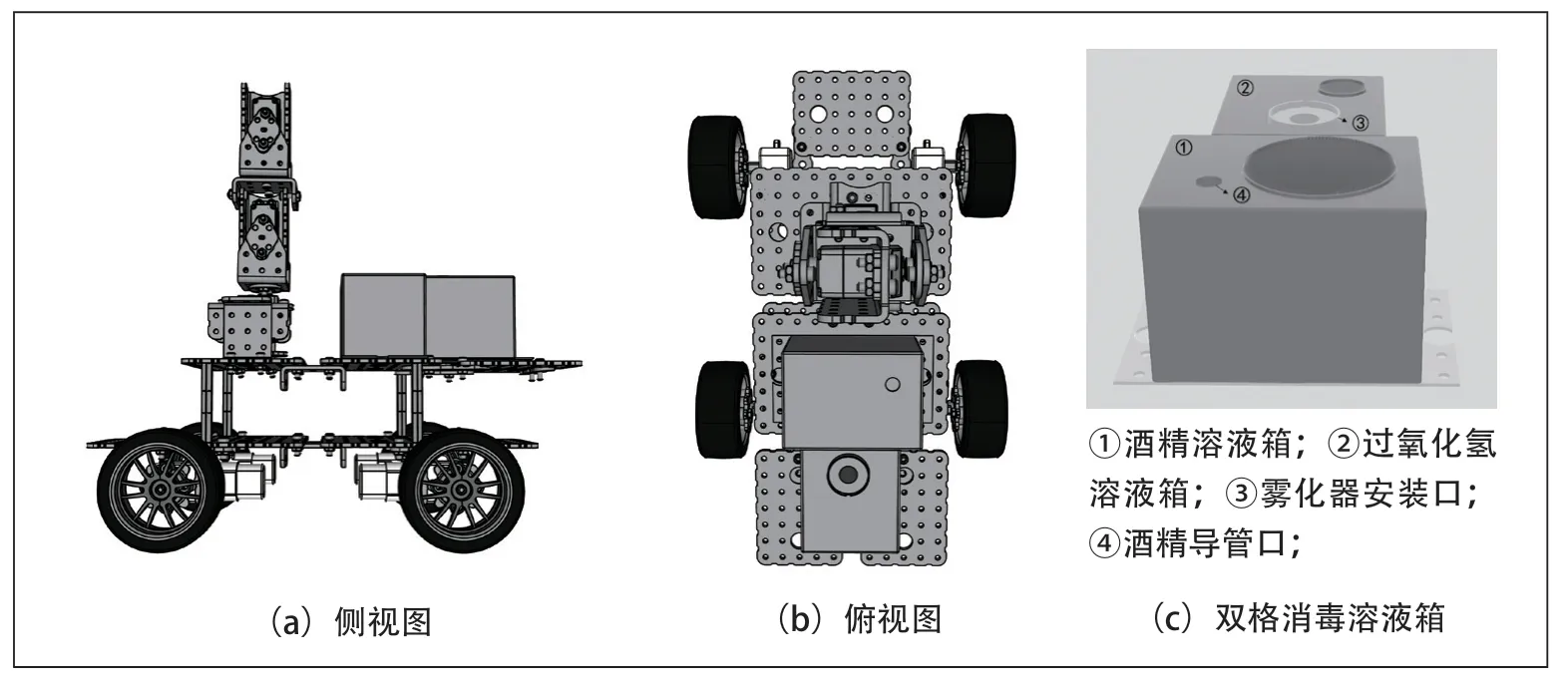
图2 消毒机器人整体结构图
消毒机器人采用轮式双层结构,如图2(a)和图2(b)所示。底层放置主控制板,上层后侧放置消毒溶液箱,前侧设计3 自由度的关节型机械臂装载喷头和酒精溶液导管,酒精溶液从机械臂前侧喷出,实现对局部区域或物品的酒精喷洒局部消毒。
■2.2 视觉识别模块
消毒机器人前侧安装摄像头,在局部消毒模式下,对局部区域或物品进行图像采集与识别。采用基于YOLOv4 模型的目标检测方法[6],将目标物体在真实三维空间中的坐标与相机成像平面中的坐标对应关系通过其相同特征点计算出模型参数,对局部消毒区域或物品进行较准确的定位与形状大小识别。
确定局部消毒区域或物品的位置与形状大小后,将机械臂与目标区域之间的相对运动关系建立D-H 模型,通过次坐标变换描述各个关节之间的关系,以此建立从机械臂底座到末端的转换关系。最终,视觉模块作为机械臂消毒动作的辅助系统,辅助机器人根据被消毒区域或物品的实际形状大小调整机械臂酒精局部消毒的喷洒强度和范围。
3 自主导航部分
■3.1 驱动电机
选择带有测速反馈的直流电机,稳定性强,确保机器人稳定行驶。检测到不同风险区域时,调整机器人的行驶速度,确保过氧化氢雾化消毒的强度与风险区域对应。
■3.2 路径规划
消毒机器人在家庭或室内公共场所的巡航路线基本固定,可采用概率方法解决位姿估计以及地图绘制更新问题,采用栅格地图实现机器人的路径规划以及地图环境信息的保存[7]。
为实现更高精度的定位以及绘制较为精准的地图,避免由于机器人车轮打滑以及地面不平整导致的位姿估计不匹配,保障机器人按照规划路径正常行驶,采用了以下两种策略:第一种措施是通过消毒机器人前侧的超声波传感器,实时监测机器人与周边环境的距离,微调修正机器人的行驶路线,保障其在规划的路径上;第二种措施是根据消毒机器人的使用周期,定期对环境地图进行调整,更新路径规划。
■3.3 自主避障
常见的避障方式包含超声波避障、红外避障等,其主要依附于外部传感器接收周围环境信息并传输至控制器使机器人做出反应。本设计采用舵机与超声波传感器结合的方式,使得超声波传感器不仅可以探测前侧障碍物,还可以通过舵机的左右旋转,探测出两侧是否有可选择的避障路径。程序流程如图3 所示。
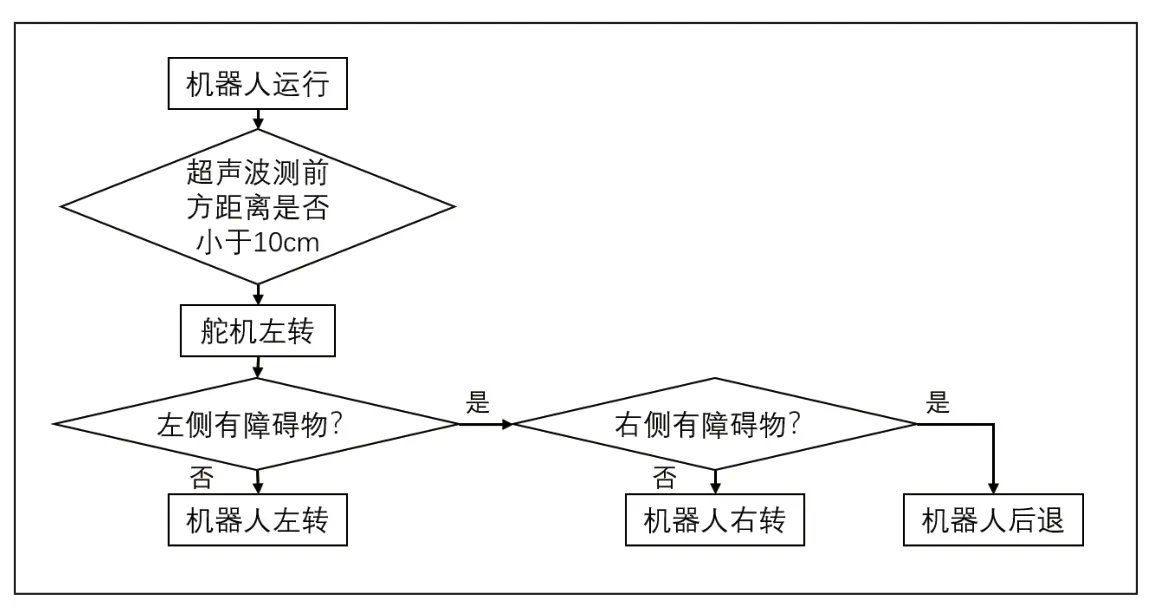
图3 消毒机器人自主避障逻辑图
■3.4 风险区域识别
用户划分风险区域,对不同的风险区域粘贴不同的风险等级颜色标识,例如,高风险等级用红色标识,中风险等级用黄色标识,低风险等级用绿色标识,以家庭消毒为例,风险区域等级划分如表1 所示。

表1 家庭风险区域等级划分
在不同风险区域等级的分界处粘贴颜色标识,通过颜色识别出即将进入的不同风险区域等级后,控制器调整机器人的行驶速度,使其在不同风险等级区域下保持不同的平均速度。
本文采用TCS3200颜色传感器进行风险等级颜色识别,其通过感应芯片以及滤光器对检测的颜色RGB值进行分析,并将测试值传输给控制器;控制器则根据传输的RGB 值范围,判断出机器人所在区域的风险等级变化,从而控制机器人行驶速度。最终实现消毒机器人在不同风险等级区域,实施不同强度的消毒作业。
4 人机交互部分
■4.1 语音控制
语音控制,即人机语音交互系统,当人对系统发送语音指令时,机器人上的语音采集设备将收集到的语音信息传输给语音识别系统,此时语音识别系统将语音信号转化为电信号,在传输给控制器,将语音系统的指令进行匹配,若匹配成功,控制器将会将指令发送给驱动和执行机构,使机器人根据指令完成动作[8]。
本设计语音控制系统结构如图4 所示。采用LD3320 语音模块,其包含对非特定人语音识别和声控芯片,能对可识别的关键词列表进行动态编辑。消毒机器人预设了“开始消毒”“停止消毒”“消毒15 分钟”等语音控制指令。
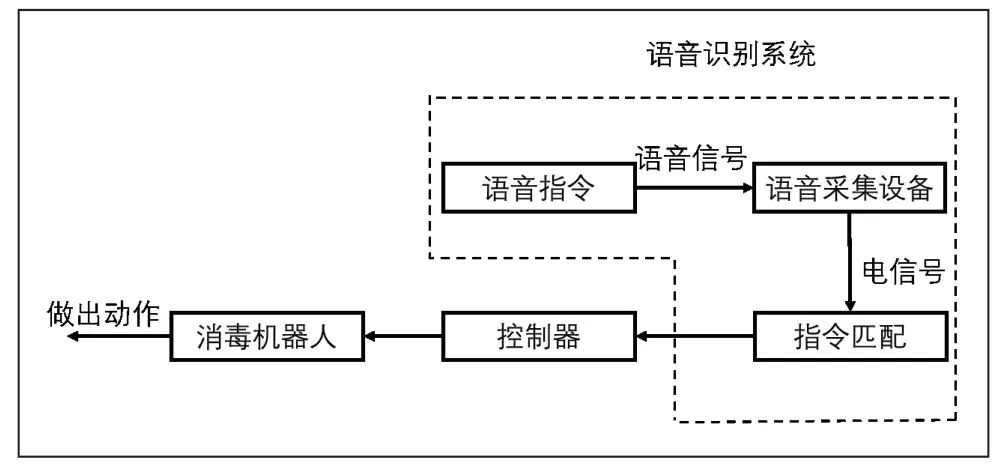
图4 语音控制系统结构图
■4.2 手机APP 远程控制
目前,手机APP 实现远程控制的途径有蓝牙、WiFi 通讯等,本文选择使用型号为GL-AR150 的无线路由器模块作为手机与消毒机器人的远程无线通信桥梁,实现对消毒机器人的监控。
5 模型机制作与测试
选用“探索者”模块化机器人组件,制作出如图5 所示的消毒机器人模型机,进行功能测试。
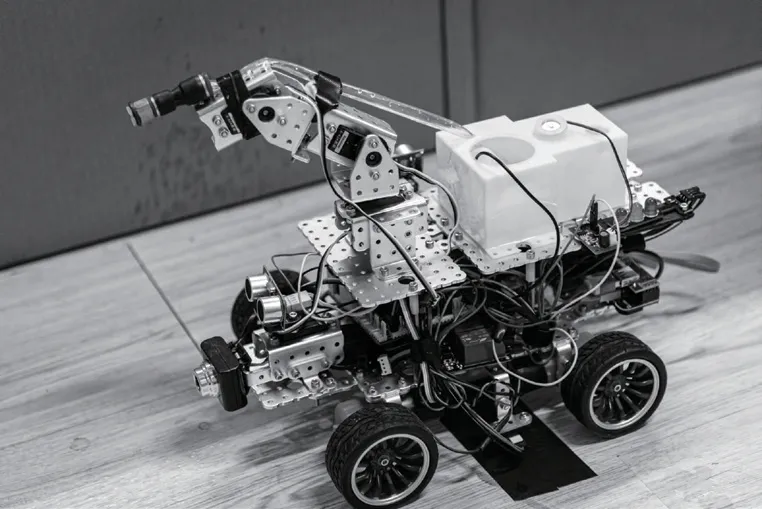
图5 消毒机器人模型机外观图
■5.1 机械臂局部消毒测试
对机械臂酒精喷洒局部消毒功能进行测试,选用三种机械臂动作,定义底座为1 号关节,中部关节为2 号,头部关节为3 号,三种动作如下:
(1)保持1 号与2 号关节位于90°位置保持不变,3 号舵机在60°与120°之间摆动;
(2)保持2 号关节位于135°居中位置不变,使1 号与3号关节搭配动作,1 号关节缓慢由45°移动至135°,3 号关节分别在1号关节45°、90°和135°时在120°与90°之间上下摆动;
(3)1号关节缓慢由90°移动至135°,2号关节由135°移动至180°,3 号关节在120°与140°之间摆动;
测试发现酒精溶液喷洒压力合适,只需通过程序控制喷洒角度和持续时间,就能保证局部消毒喷洒效果,对门把手、快递表面都能达到较好的消毒效果。
■5.2 自主避障测试
在消毒机器人规划路径上放置不同形状大小的障碍物,进行如图6 所示的自主避障测试。统计其避障成功率,以及回归原路线的成功率。
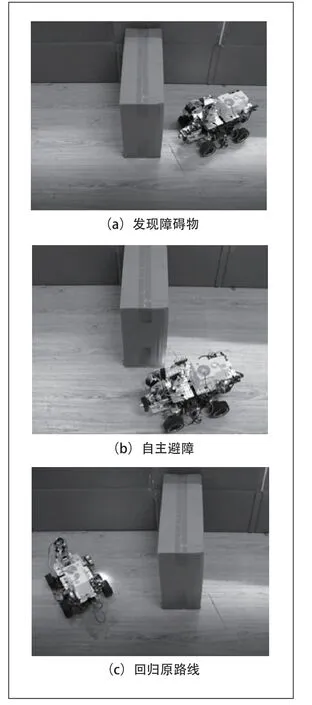
图6 消毒机器人避障测试视频截图
测试结果如表2 所示。可见,消毒机器人对于形状规则物体,基本上能够完成自主避障,对于不规则形状物体,也有较好的避障效果。
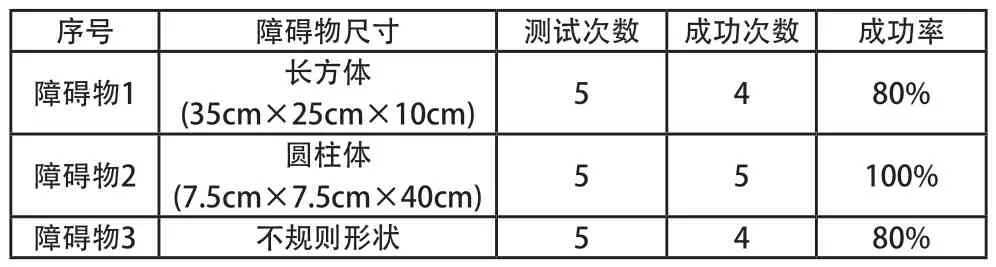
表2 自主定点局部消毒测试结果
6 结语
本文设计制作了一款基于风险区域划分的多策略智能消毒机器人,结合路径规划、自主避障、语音识别、视觉识别等技术,实现了机器人自主导航、用户语音和手机APP人机交互控制消毒等多种工作模式。在自主导航模式下,机器人根据路径规划和颜色识别,对不同风险区域实施不同强度的过氧化氢雾化消毒,满足对环境空气消毒的需求,同时机械臂搭配视觉识别辅助系统,对局部区域或物品进行可调强度和范围的酒精喷洒局部消毒。在人机交互方面,实现了用户语音和手机APP 人机交互控制消毒。